基于AMESim的负荷传感液压同步系统仿真研究
基于AMEsim的液压系统建模与仿真

基于AMEsim的液压系统建模与仿真【摘要】本文介绍了基于AMEsim的液压系统建模与仿真,首先从研究背景和研究意义入手,说明了液压系统在工程领域中的重要性。
然后详细介绍了AMEsim软件的特点和优势,以及液压系统建模和仿真的方法和步骤。
通过案例分析,展示了AMEsim在液压系统中的应用效果,并探讨了参数优化的方法。
结论部分总结了基于AMEsim的液压系统建模与仿真的优势,并展望了未来的发展方向。
本文系统地介绍了基于AMEsim的液压系统建模与仿真的方法和实践经验,具有一定的参考价值和实用性。
【关键词】液压系统、AMEsim、建模、仿真、案例分析、参数优化、优势、未来发展方向1. 引言1.1 研究背景传统液压系统建模与仿真往往需要耗费大量时间和资源,且受到实验数据的限制,难以获得准确的仿真结果。
基于AMEsim的液压系统建模与仿真技术则能够准确模拟系统的动态行为,通过仿真分析获取系统参数和性能,为系统设计和优化提供重要参考。
开展基于AMEsim的液压系统建模与仿真研究具有重要意义,能够为液压系统的设计和优化提供有效手段,提高系统性能和工作效率。
为此,本文将深入探讨基于AMEsim的液压系统建模与仿真方法,在液压系统领域具有一定的理论和实践意义。
1.2 研究意义液压系统在工程领域中扮演着至关重要的角色,广泛应用于各种机械设备和工业系统中。
液压系统的建模与仿真是提高系统性能、降低成本和优化设计的关键步骤。
基于AMEsim的液压系统建模与仿真为工程师提供了一个高效、准确的工具,可以帮助他们更好地理解系统行为、预测系统性能,并进行有效的设计优化。
通过基于AMEsim的液压系统建模与仿真,工程师可以在计算机上快速建立系统模型,并模拟系统在不同工况下的工作状态。
这可以大大缩短设计周期,减少实验成本,提高系统的可靠性和性能稳定性。
通过参数优化和仿真分析,工程师可以更好地优化系统设计,提高系统效率,降低能耗和维护成本。
基于AMEsim的液压系统建模与仿真

基于AMEsim的液压系统建模与仿真1. 引言1.1 液压系统的重要性在工业生产中,液压系统不仅能够提高生产效率和产品质量,还能够实现复杂的动作控制,如加工、装配、搬运等工艺。
液压系统还可以实现大功率、高速度、大扭矩等要求的动力传递,满足各种工程设备对动力传动的需求。
1.2 AMEsim在液压系统建模中的应用AMEsim是一款专业的多物理领域建模和仿真软件,广泛应用于液压系统建模中。
利用AMEsim软件,工程师们可以快速准确地对液压系统进行建模、仿真和优化,从而提高系统设计的效率和可靠性。
在液压系统建模中,AMEsim通过模拟液压元件的动态行为,可以帮助工程师们更好地理解系统的工作原理和特性。
通过简单易用的界面和丰富的库文件,工程师们可以快速构建复杂的液压系统模型,并进行参数化和优化。
AMEsim还具有强大的仿真和分析功能,可以帮助工程师们有效地验证设计方案,预测系统性能,并进行虚拟试验。
通过对液压系统建模过程中的各种运动学、动力学和热力学效应进行精确的仿真,工程师们可以在设计阶段就发现潜在问题,并进行改进。
AMEsim在液压系统建模中的应用为工程师们提供了一种高效、准确和可靠的工具,可以帮助他们优化系统设计、提高工作效率,并最终实现液压系统的性能和可靠性的提升。
2. 正文2.1 液压系统的工作原理液压系统是一种利用液体传递能量的系统,其工作原理是通过利用液体在封闭管路中的压力来传递动力。
液压系统由液压泵、执行元件、控制元件和液压储能装置组成,液压泵将机械能转换为液压能,并将液压液送入管路中,液压液通过管路传递到执行元件,使之产生相应的运动或力。
控制元件则用来控制液压系统的工作方式和速度,液压储能装置则用来储存液压能,以便在需要时释放能量。
液压系统的工作原理基于帕斯卡定律,即液体在封闭容器中的压力均匀分布。
当液压泵提供压力时,液压系统中的液压液会传递这个压力,使得执行元件产生运动或力。
液压系统的优点是传递力矩大、稳定性好、反应速度快、工作范围广等。
《2024年基于AMESim的液压系统建模与仿真技术研究》范文
《基于AMESim的液压系统建模与仿真技术研究》篇一一、引言随着现代工业技术的不断发展,液压系统在各种机械设备中扮演着至关重要的角色。
为了更好地理解液压系统的性能,优化其设计,以及进行故障诊断和预测,建模与仿真技术显得尤为重要。
本文将介绍基于AMESim的液压系统建模与仿真技术研究,以期为相关领域的研发和应用提供有益的参考。
二、AMESim软件概述AMESim是一款功能强大的工程仿真软件,广泛应用于机械、液压、控制等多个领域。
它提供了一种直观的图形化建模环境,用户可以通过简单的拖拽和连接元件来构建复杂的系统模型。
此外,AMESim还支持多种物理领域的仿真分析,包括液压、气动、热力等。
三、液压系统建模在AMESim中,液压系统的建模主要包括以下几个方面:1. 液压元件建模:包括液压泵、液压马达、油缸、阀等元件的建模。
这些元件的模型可以根据实际需求进行参数设置和调整。
2. 流体属性设置:根据液压系统的实际工作情况,设置流体的属性,如密度、粘度等。
3. 系统拓扑结构构建:根据实际系统的结构,搭建系统拓扑结构,并设置各元件之间的连接关系。
4. 仿真参数设置:根据仿真需求,设置仿真时间、步长等参数。
四、液压系统仿真在完成液压系统的建模后,可以通过AMESim进行仿真分析。
仿真过程主要包括以下几个方面:1. 初始条件设置:设置系统的初始状态,如初始压力、流量等。
2. 仿真运行:根据设置的仿真时间和步长,运行仿真程序。
3. 结果分析:通过AMESim提供的可视化工具,分析仿真结果,如压力、流量、温度等参数的变化情况。
五、技术应用与优势基于AMESim的液压系统建模与仿真技术具有以下优势:1. 高效性:通过图形化建模环境,可以快速构建复杂的液压系统模型,提高建模效率。
2. 准确性:AMESim提供了丰富的物理模型和算法,可以准确模拟液压系统的实际工作情况。
3. 灵活性:用户可以根据实际需求,灵活地调整模型参数和仿真条件,以获得更符合实际的结果。
基于AMESim的液压机械手负载敏感系统仿真研究

108
本栏目编 辑 陆秋 云
105
第 39 卷 2011 年第 12 期
目械手应用范围,重点从生产和应用的角度出
发,结合我国国情,加快投Байду номын сангаас生产结构简单、成本低 廉且节能实用的机械手,以减轻工人的劳动强度,并 改善作业条件。而液压机械手由液压作为动力,利用
前,国内机械手的发展方向主要是逐步扩大机
106
本栏目编 辑 陆秋 云
Fig 1
图 1 机械手液压系统原理 Principle of manipulator hydraulic system
1.1 负载敏感泵工作原理
负载敏感泵主要是由负载敏感阀、压力切断阀和 变量缸组成,如图 2 所示[3]。 负载敏感泵是通过敏感阀芯的位移变化量使液压 泵斜盘倾角产生变化,从而使流量和压力发生变化, 并在它们之间组成一个反馈回路。 液压泵启动前,在变量液压缸弹簧的作用下,变 量泵的排量最大。当液压泵开始工作时,比例方向阀 处在中位状态,Ls 反馈过来的压力与油箱压力基本 相等;敏感阀下端仅受弹簧力的作用,上端承受泵的 出口压力,液压泵的出口压力通过敏感阀进入变量液 压缸的敏感腔,使变量泵的斜盘角度逐渐变小,直到 只能维持系统的泄漏量对应的角度为止。当比例方向 阀处于工作位置时,Ls 反馈的最高负载压力和变量
电液比例控制作为控制手段,具有很大的抓举能力; 其特点是结构紧凑、动作平稳且位置精度高,力、速 度、位置和方向容易实现自动控制,防锈性、自润滑 性能、耐冲击性、耐震动和防爆性能较好[1];而作为 传动能力优异的液压系统,其节能设计是主要问题。 国内液压机械手多采用传统的液压系统进行简单的操 作,即可达到工作要求。但传统液压系统有很多不 足,由于其大多采用定量泵,输出的流量不变,当系 统要求低流量时,多余的流量就通过溢流调节的方式 流回油箱,空载时也是如此,所以节流损失很大;同 时液压系统的传动效率只有 60% ~ 70%。在机械手的 液压系统中,有几个手臂配合工作,每个手臂液压缸 需要的压力和流量都不一样,所以负载敏感在机械手 上有着很高的应用价值。
基于AMESim的液压系统建模与仿真技术研究
基于AMESim的液压系统建模与仿真技术研究基于AMESim的液压系统建模与仿真技术研究引言液压系统作为一种广泛应用于工程领域的能量传递和控制系统,其性能优越、可靠性高,因此在现代机械工程中得到了广泛的应用。
然而,液压系统的设计和优化需要耗费大量的人力和物力,这是由于液压系统的复杂性和实验验证的困难造成的。
因此,研究基于AMESim的液压系统建模与仿真技术,对于提高液压系统设计的可行性和效率具有重要意义。
液压系统的基本原理液压系统由液压泵、控制阀、液压缸等组成。
液压泵通过机械能输入将液体压力能转化为液压能;控制阀对液压系统中的流量、压力和方向进行调整和控制;液压缸将液压能转化为机械能,实现所需的工程作业。
AMESim的概述AMESim是一种常用的物理系统建模和仿真软件,其特点是可以建模、仿真和分析多学科、多物理域、多尺度和多能源系统。
AMESim通过图形化的界面,提供了丰富的元件库、尺度变换和仿真配置等功能,使得建模和仿真成为可能。
基于AMESim的液压系统建模技术1. 液压元件建模液压系统涉及到多个元件,如液压泵、阀门等。
在AMESim中,我们可以通过选择相应的元件进行建模,并配置相关参数,以描述元件的特性和性能。
例如,在液压泵的建模中,可以选择泵的类型、工作参数、曲线等。
2. 液压系统建模液压系统可以被看作是多个液压元件的组合,在AMESim中,我们可以通过连接液压元件来建立液压系统。
同时,还可以配置不同的工况参数、工作模式等,以模拟不同的液压系统运行情况。
3. 参数优化和仿真分析在液压系统建模完成之后,可以通过参数优化和仿真分析来对液压系统进行优化和性能评估。
我们可以通过改变相关参数,比如液压泵的转速、阀门开度等,来优化液压系统的性能。
液压系统仿真与验证基于AMESim的液压系统仿真可以在计算机上对液压系统的各项参数进行分析和验证,从而大大减少了实验验证的成本和工作量。
通过仿真分析,我们可以获取液压系统的动态响应曲线、功率及效率曲线等,进一步优化系统设计。
基于amesim仿真的液压压力控制系统研究与应用
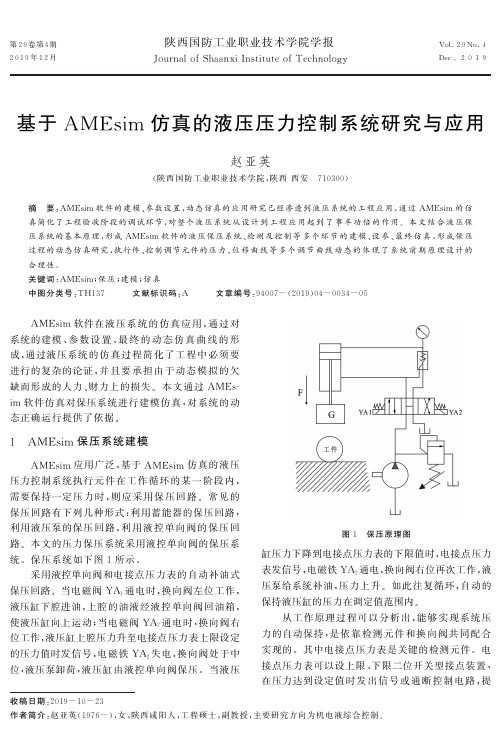
第29卷第4期2019年12月㊀陕西国防工业职业技术学院学报J o u r n a l o f S h a a n x i I n s t i t u t e o fT e c h n o l o g yV o l 29N o 4D e c .2019收稿日期:2019-10-23作者简介:赵亚英(1976-),女,陕西咸阳人,工程硕士,副教授,主要研究方向为机电液综合控制.基于AM E s i m 仿真的液压压力控制系统研究与应用赵亚英(陕西国防工业职业技术学院,陕西西安㊀710300)摘㊀要:AM E s i m 软件的建模㊁参数设置,动态仿真的应用研究已经渗透到液压系统的工程应用,通过AM E s i m 的仿真简化了工程验收阶段的调试环节,对整个液压系统从设计到工程应用起到了事半功倍的作用.本文结合液压保压系统的基本原理,形成AM E s i m 软件的液压保压系统㊁检测及控制等多个环节的建模㊁设参㊁最终仿真,形成保压过程的动态仿真研究,执行件㊁控制调节元件的压力㊁位移曲线等多个调节曲线动态的体现了系统前期原理设计的合理性.关键词:AM E s i m ;保压;建模;仿真中图分类号:T H 137㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:94007-(2019)04-0034-05㊀㊀AM E s i m 软件在液压系统的仿真应用,通过对系统的建模㊁参数设置㊁最终的动态仿真曲线的形成,通过液压系统的仿真过程简化了工程中必须要进行的复杂的论证,并且要承担由于动态模拟的欠缺而形成的人力㊁财力上的损失.本文通过AM E s Gi m 软件仿真对保压系统进行建模仿真,对系统的动态正确运行提供了依据.1㊀AM E s i m 保压系统建模AM E s i m 应用广泛,基于AM E s i m 仿真的液压压力控制系统执行元件在工作循环的某一阶段内,需要保持一定压力时,则应采用保压回路.常见的保压回路有下列几种形式:利用蓄能器的保压回路,利用液压泵的保压回路,利用液控单向阀的保压回路.本文的压力保压系统采用液控单向阀的保压系统.保压系统如下图1所示.采用液控单向阀和电接点压力表的自动补油式保压回路.当电磁阀Y A 1通电时,换向阀左位工作,液压缸下腔进油,上腔的油液经液控单向阀回油箱,使液压缸向上运动;当电磁阀Y A 2通电时,换向阀右位工作,液压缸上腔压力升至电接点压力表上限设定的压力值时发信号,电磁铁Y A 2失电,换向阀处于中位,液压泵卸荷,液压缸由液控单向阀保压.当液压图1㊀保压原理图缸压力下降到电接点压力表的下限值时,电接点压力表发信号,电磁铁Y A 2通电,换向阀右位再次工作,液压泵给系统补油,压力上升.如此往复循环,自动的保持液压缸的压力在调定值范围内.从工作原理过程可以分析出,能够实现系统压力的自动保持,是依靠检测元件和换向阀共同配合实现的.其中电接点压力表是关键的检测元件.电接点压力表可以设上限㊁下限二位开关型接点装置,在压力达到设定值时发出信号或通断控制电路,提供压力系统工作进行自动控制或发信号.此系统的AM E s i m软件仿真的重点在于,不仅要仿真出保压系统的液压功能,同时还应该将此保压回路的保压控制过程用自动控制功能仿真出来.图2㊀保压回路仿真建模㊀㊀根据图1的系统原理,设计系统仿真建模如图2所示,由于此系统结构复杂,所以对系统的仿真先从液压部分分析建模及仿真参数设置及动态运行过程.1.1㊀液压系统建模根据保压回路的功能提取液压系统,建模图如下图3所示.图3㊀液压系统仿真建模图中1㊁2的作用很简单,就是为了产生所需要的流量,在建模过程的参数设置中,设定流量为10L/m i n,所以设置1的s h a f t s p e e d转速为1000,2的p u m p d i s p l a c e m e n t泵排量为10,两者相乘为10L/m i n.元件3的参数保持系统默认.元件4实现系统换向功能的主要元件,我们还是以力士乐品牌的换向阀的型号来进行系统建模.该换向阀的的中位机能为H型,换向阀的型号为4W E6H6X/S G24N.通过设计手册查出力士乐换向阀样本,得其流量随着流量增大压力降增大.由于系统的最大流量为10L/m i n,在流量为10L/m i n时,P A,A T和B T大约为0.3b a r,P B大约0.2b a r.参数设置见表1.5号元件是液控单向阀,其参数也可以查手册进行设置,结果设置如表1中参数值.6号元件的作用是测量液压缸上腔的压力,使保压功能能够实现的重要元件,但该元件的参数设置较简单,仿真系统采用默认值.7号元件是液压缸,为了节省建模时间,选择液压库中现成的单出杆液压缸模型,而没有选择H C D库中的元件.其参数设置见表1.其中比较重要的参数是a n g l e r o dm a k e sw i t hh o r i z o n t a l水平角度和l e a kGa g e c o e f f i c i e n t泄露系数,其中前者设定了液压缸的摆放方式,按原理图1所示的摆放方式,应该设置其53赵亚英:基于AM E s i m仿真的液压压力控制系统研究与应用值为-900;后者设定了液压缸的内泄漏.正是由于内泄漏的存在,液压缸上腔的压力才会逐渐渗漏到下腔中去,造成上腔压力降低,液压泵重新启动,为上腔加压,这一自动过程才能实现.1.2㊀检测系统建模位置检测部分的仿真建模框架如图4所示,根据保压系统原理图,液压缸在下行到碰触圆形工件之前,有一段空行程距离,接触工件后,液压缸的外负载力有一个随位移继续增加而增长的趋势,这在仿真中都要考虑到,所以位置检测部分增加了多了比较信号.表1㊀液压传动元件参数表元件编号参数设定值单位1S h a f t s pe e d 1000r /m i n2P u m p d i s pl a c e m e n t 10m 3/s4p o r t s Pt oAf l o wr a t ea tm a x i m u mv a l v eo p e n i n g 10L /m i n P o r t sPt oAc o r r e s p o n d i n gp r e s s u r ed r o p 0.3B a r p o r t s Bt oTfl o wr a t ea tm a x i m u mv a l v eo p e n i n g 10L /m i n p o r t sBt oTc o r r e s p o n d i n gp r e s s u r ed r o p 0.3B a r P o r t sPt oBf l o wr a t ea tm a x i m u mv a l v eo p e n i n g 10L /m i n P o r t sPt oBc o r r e s p o n d i n gp r e s s u r ed r o p0.2B a r P o r t sAt oTf l o wr a t ea tm a x i m u mv a l v eo p e n i n g 10L /m i n P o r t sAtoTc o r r e s p o n d i n gp r e s s u r ed r o p0.3B a r 5c h e c k v a l v ec r a c k i n gp r e s s u r e 0.5B a r n o m i n a l p r e s s u r ed r o p 1B a r 7P i s t o nd i a m e t e r 50m r o d d i a m e t e r30m l e n g t h o f s t r o k e 0.5mt o t a l m a s sb e i n g mo v e d 50K ga n gl e r o dm a k e sw i t hh o r i z o n t a l -900l e a k a gec o e f f i c i e n t 0.0001L /m i n元件8的作用是为了检测液压缸的位移,元件9的作用是将信号转换为负载(单位N ).元件10的作用是进行比较.当液压缸的位移(x )小于设置值(元件11)0.3m 时,外负载力由元件12设定;当液压缸位移(x )大于设置值(元件11)0.3m 时,外负载力的大小由液压缸的位移与0.3m (元件11)的差值为自变量的函数(元件13)计算得到,作为液压缸受到的外负载力.通过以上分析,可以分析出当液压缸的位移小于0.3m 时,外负载力为O N (不算液压缸自重),这时液压缸还没有碰触到工件;当液压缸位移大于0.3m 时,位移值与0.3m 的差值作为函数f (x )=100000∗x 的自变量,计算得到负载力,作用在液压缸上,模拟液压缸挤压工件所受到的力.这样,通过图4㊀位置检测部分仿真信号图4这部分仿真回路,完整地模拟了液压缸的位移和外负载力之间的关系,为系统正确的动态运行创造了条件.参数设置如表2所示,没有提到的元件参数设置保持默认值.表2㊀位置检测参数设置元件编号参数设置值单位11c o n s t a n t v a l u e 0.3m 12c o n s t a n t v a l u e0m 13e x p r e s s i o n i n t e r m s o f t h e i n pu t x 100000∗x N14s w i t c h t h r e s h o l d11.3㊀控制系统建模控制部分的仿真建模如图5所示,元件19㊁20的作用是设定压力的上㊁下限,模拟的是电接点压力表的上㊁下限动态范围.下限设定为28b a r ,上限设定为30b a r.图5㊀控制仿真建模元件16㊁21的作用是将液压缸上腔的压力之值和设定的上㊁下限进行比较,当小于28b a r 时,输出40m A 信号(元件22),当大于30b a r 时,输出信号0m A (元件17).将这两个结果求和(元件18),共同输入给图3中的元件4(换向阀),决定换向阀是左位工作(40m A )还是中位工作(0m A ),从而控制是加压状态(左位工作)还是中位工作的保压状态.元件的参数设置如表3所示.63陕西国防工业职业技术学院学报表3㊀控制环节参数设置元件编号参数设置值单位17v a l u e o f g a i n0m A19c o n s t a n t v a l u e 30B a r 20c o n s t a n t v a l u e 28B a r 22v a l u e o f g a i n40m A2㊀AM E s i m 仿真系统运行液压系统部分㊁位置检测部分㊁控制运行等3部分建模和参数设置完成之后,就可以进行动态运行仿真环节,进入仿真模式,将仿真时间设定为50s,运行参数的仿真结果.选择液压缸7,仿真活塞杆位移曲线,如图6所示.从图中可以观察到当液压缸下行碰触到工件前,运动速度较快,当碰触到工件后(位移超过0.3m ),有一段时间积蓄压力,如图6的第一个台阶所示.液压缸继续加压下行,到位移大约为0.36m 处,停止前进,进行保压,位移保持.图6㊀活塞杆位移曲线液压缸端口1处的压力曲线如图7所示.当压力达到正常值之后,保压系统正常启动后,压力保持在28b a r 和30b a r 之间.仿真元件换向阀4的输入信号i n p u t s i n gn a l 如图8所示.从仿真曲线可以分析出,刚开始,换向阀图7㊀液压缸端口压力曲线的输入信号为40M a ,液压缸快速下行,碰到工件后,压力上升,达到30b a r ,进入保压阶段.由于液压缸内部有泄漏,随着时间的延续,液压缸上腔压力有所下降,在34s ㊁44s 处,换向阀两次接通,自动补充压力,进行压力保压环节.图8㊀换向阀输入信号仿真结果3㊀结语从以上的AM E s i m 的仿真结果可以看出,此液压保压系统能完成系统保压功能,通过液控单向阀完成系统的及时补油,并通过位移检测和控制信号的比较对液压保压过程进行的仿真,通过对液压缸的位移仿真㊁压力仿真㊁换向阀的补油过程仿真,仿真曲线显示与系统保压原理吻合,动态曲线完整的显示了整个保压系统的工作过程.T h eR e s e a r c ha n dA p p l i c a t i o no fH yd r a u l i c P re s s u r eC o n t r o l S ys t e mB a s e do nA M E s i mS i m u l a t i o n Z HA OY a y i n g(S h a a n x i I n s t i t u t e o fT e c h n o l o g y Xi a nS h a a n x i 710300)A b s t r a c t :T h em o d e l l i n g ,p a r a m e t e r s e t t i n g o f t h e s o f t w a r eAM E s i ma n d t h e a p pl i c a t i o n r e s e a r c hh a v e p e r Gm e a t e d i n t o t h ea p p l i c a t i o no f t h eh y d r a u l i cs y s t e m.T h r o u g ht h eAM E s i m ,t h ed e b u g g i n g li n e ki nt h e s t a g e o f p r o j e c t a c c e p t a n c e i s s i m p l i f i e d ,a n d i t h a s a d o u b l e e f f e c t o n t h e h y d r a u l i c s y s t e mf r o md e s i g n i n g73赵亚英:基于AM E s i m 仿真的液压压力控制系统研究与应用t o t h eu s e t h r o u g hh a l f o f t h ew o r k.C o m b i n e dw i t h t h eb a s i c p r i n c i p l eo f h y d r a u l i c p r e s s u r eh o l d i n g s y sGt e m,t h i s p a p e r f o r m s t h em o d e l i n g o f t h e h y d r a u l i c p r e s s u r e h o l d i n g s y s t e mo fAM E s i ms o f t w a r e,s u c h a s t e s t i n g a n d c o n t r o l l i n g,s e t t i n g p a r a m e t e r s,f i n a l l y s i m u l a t i n g,f o r m i n g t h e d y n a m i c s i m u l a t i o n r e s e a r c ho f p r e s s u r eh o l d i n gp r o c e s s,e x e c u t i n gp a r t s,c o n t r o l l i n g t h e p r e s s u r eo fa d j u s t i n g e l e m e n t s,d i s p l a c e m e n t c u r v e a n d s oo n.K e y W o r d s:AM E s i m;M o d e l l i n g;S i m u l a t i o n参㊀考㊀文㊀献[1]㊀李明飞,吴勇,田野,徐保强.基于AM E S i m的带阻尼调节器的电液换向阀仿真研究[J].液压与气动,2015(02):91G93.[2]梁晓娟.基于AM E S i m三位四通阀动态仿真研究[J].煤矿机电,2009(05):34G36.[3]冯静,李卫民,甘元强.基于AM E S i m的溢流阀动态特性研究[J].机械工程师,2009(09):41G43.[4]苏明,陈伦军.基于AM E S i m的电磁高速开关阀动静态特性研究[J].液压与气动,2010(02):68G72.[5]孙成通,陈国华,蒋学华,韩虎.液压系统仿真技术与仿真软件研究[J].机床与液压,2008(10):140G143.[6]陈阳国,曾良才,吕敏建.基于AM E S i m的液压位置伺服系统故障仿真[J].机床与液压,2007,35(09):215G216.[7]秦贞超,周志鸿,周梓荣,马肖丽.基于A M E S i m的水压凿岩机冲击机构建模与仿真[J].液压气动与密封,2010,30(12):30G34.[8]张燕.国外声波钻机及其应用[J].探矿工程:岩土钻掘工程(岩土钻掘工程),2008,35(07):105G107.(上接第12页)之间也可以互相评价给分.教师可以通过任务和评价结果,准确性地把握学生的掌握程度和问题趋向,也有利于教师对下一节课教学内容的调整和补充.4㊀结语综上内容, MO O C+云班课 的高职英语翻转课堂教学模式适应当下教育现代化的高职英语教学改革的形势.高职英语翻转课堂教学突出教师主导,学生主体的师生角色,云班课辅助教学软件,基于MO O C大量的教学素材和渗透着课程思政的教学内容,使师生之间的教学活动有声有色的开展,学生乐习,有助于高素质的人才培养.T h eT e a c h i n g M o d e a n dA p p l i c a t i o no f F l i p C l a s so fH i g hV o c a t i o n a l E n g l i s hB a s e do n M O O C+C l o u dC l a s sWA N GZ h e n(S h a a n x i I n s t i t u t e o fT e c h n o l o g y X i a nS h a a n x i710300)A b s t r a c t:H i g hv o c a t i o n a l c o l l e g e f l i p c l a s s i s a n i n n o v a t i o n t o t h e t r a d i t i o n a l E g n l i s h t e a c h i n g i nh i g hv o c aGt i o n a l c o l l e g e s.I t c o m b i n e sMO O Cw i t hC l o u dC l a s s,a n d i s a p p l i e d i n t h eE n g l i s ht e a c h i n g c l a s so f h i g h v o c a t i o n a l c o l l e g e s.I t h i g h l i g h t s t h e t e a c h e rGs t u d e n t r o l e l e db y t e a c h e r s a n d s t u d e n t s,i n t r u d i n g t h e c o nGc e p t o f p o l i t i c a l i d e o l o g y w i t h t h e t e a c h i n g m e t h o do f n o r m a l i z a t i o n c o n d e n s e s t h e e f f e c t i v e a n d i n t e r e s t i n g E n g l i s ht e a c h i n g m a t e r i a l s,a n d f o r m s t h e t e a c h i n g m o d eo f t h eh i g hv o c a t i o n a l c o l l e g eE n g l i s hw i t ht h e m o d e o f MO O C+C l o u d c l a s s .C o m b i n i n g t h e a b o v e t e a c h i n g v i e w s,i t o f f e r s au n i v e r s a l f l i p c l a s sd eGs i g nb y a p p l y i n g t h eMO O C+C l o u d c l a s s t om y o w n t e a c h i n g a c t i v i t y.K e y W o r d s:MO O C+C l o u d c l a s s;F l i p c l a s s i nh i g hv o c a t i o n a l E n g l i s hc l a s s;T e a c h i n g m o d e参㊀考㊀文㊀献[1]㊀黄娇红.基于翻转课堂在小学教学中的可行性探究[J].科教文汇,2019(24):125G126.[2]雷隽博.基于MO O C的大学英语翻转课堂教学模式探究[J].黑龙江教育学院学报,2019(08):139G141.83陕西国防工业职业技术学院学报。
基于AMESim的负荷传感与LUDV液压系统的仿真研究

制 活塞 是 以 牺牲 阀 的定 压 精度 ,实 现 阀 的卸 载压 力 和
加 载压 力 的 不 同 。卸载 阀 自动卸 载 和 自动 加 载功 能 的 实现 , 以使 泵在 一定 的压 力 范 围内保 持卸 载状 态 。这 可
导 阀芯 的加工 与热 处理 难度 , 具有 较好 的工 艺性 。
h da l ytm ad L D y rui ss m ta te r okn n a s l o i ̄ u p ad mu i atao ae nlsd h e yrui ss n U V h dal yt h t h yaew rig i t e fs ep m n l — c tr r a a e.T c e c e y n t u y
L Me g C We - u n I n AI n y a
( eq oo t o,t. e ig 0 2 6 hn ) B ii tn Moo C . d,B in 1 2 0 ,C ia F r L j
Ab ta t I hs p p r la e sn y rui y tm n UDV h d a l y tm l nrd c d T e c aa tr t s o o d s n ig sr c : n ti a e, o d sn ig h da l sse a d L c y rui s s c e ae it u e . h h rcei i fla e sn o sc
r s l o s l t n r a ay e . e u t f i a i a e n ls d s mu o Ke W o d : la s n i g L V ; AME i ; smu a in y r s o d e sn ; UD Sm i lt o
《2024年基于AMESim的液压系统建模与仿真技术研究》范文

《基于AMESim的液压系统建模与仿真技术研究》篇一一、引言随着现代工业技术的飞速发展,液压系统在众多领域中发挥着至关重要的作用。
液压系统的设计与分析一直是工程领域的重要课题。
为了更有效地进行液压系统的设计与优化,研究人员开发了多种仿真软件,其中AMESim软件在液压系统建模与仿真方面具有广泛的应用。
本文旨在探讨基于AMESim的液压系统建模与仿真技术的研究。
二、AMESim软件及其在液压系统建模中的应用AMESim是一款多学科领域的仿真软件,广泛应用于机械、液压、控制等多个领域。
在液压系统建模中,AMESim提供了丰富的液压元件模型库,如泵、马达、缸体、阀等,可以方便地构建出复杂的液压系统模型。
此外,AMESim还提供了强大的仿真求解器和友好的用户界面,使得建模与仿真过程更加便捷。
三、液压系统建模流程基于AMESim的液压系统建模流程主要包括以下几个步骤:1. 确定系统需求与目标:明确液压系统的功能、性能指标及工作条件。
2. 建立系统模型:根据系统需求与目标,选择合适的液压元件模型,并构建出整个液压系统的模型。
3. 设置仿真参数:根据实际需求设置仿真时间、步长、初始条件等参数。
4. 进行仿真分析:运行仿真模型,观察并记录仿真结果。
5. 结果分析与优化:根据仿真结果,对液压系统进行性能分析,并针对存在的问题进行优化设计。
四、液压系统仿真技术研究液压系统仿真技术是利用计算机技术对液压系统进行模拟分析的一种方法。
基于AMESim的液压系统仿真技术具有以下优点:1. 高效性:可以快速地构建出复杂的液压系统模型,并进行大量的仿真分析。
2. 准确性:通过精确的数学模型和物理定律,可以准确地模拟液压系统的实际工作情况。
3. 灵活性:可以根据需求随时调整仿真参数和模型结构,以获得更好的仿真结果。
在液压系统仿真技术中,还需要注意以下几点:1. 模型验证:在进行仿真分析之前,需要对建立的模型进行验证,以确保其准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
统流 量 不 受负 载 变 化影 响 , 而达 到 双 缸 同步 。 从 阐述 了 负荷 传 感 液压 双 缸 同 步 系统 的 组 成 及工 作 原 理 , 立 了 负载 敏 感 泵 、 路 阀及 整 建 多
个 系 统 的 A Sm 模 型 , 验 证 了模 型 的 正确 性 。对 模 型 的仿 真 分 析表 明 : 个 油 缸 动作 时 , ME i 并 单 系统 流 量 不受 负载 变 化 影 响 , 油缸 速 度 保
p ri l a . W h n t e i p tsg as a e t e s me s n , t e wo yi d r a h e e y c r nz t n at l a od e h n u in r h a i a h t c l e l gl n s c iv s n h o i i . ao
Ke W o d : la - e sn s s m; AME i y r s od sn ig yt e S m mo e; smu ai n s n h o ia in d l i lt ; y c r n z t o o
R e e r h o a —s n i g s a c n Lo d —e sn Hy ru i S nc o o s S se da l c y hr n u y tm Ba e o AM ES m sd n i
S Hu - u HI iy ’ LU B 1 o
a e t h y t m o n e s e d o yi d r i s b e W h n t e t y id r v , t e w o l p l w d e n’ n u n e b f c t e s se f w a d t p e fc l e s t l . l h n a e h wo c l e mo e h t - o f s o s t f e c d y n s o i l
液 压 气 动 与 密 封 ,Ol 2 1年 第 3期
基于 A Sm 的负荷传感液压 ME I 同步 系统仿真研究
师辉 宇
摘
柳 波
40 8 ) 10 3
( 中南大学 机 电工 程学 院 , 湖南 长沙
要 : 对 液 压 双 缸 同 步 系 统 在偏 载 情 况 下 同步 性 能 较差 的 问题 进 行 了 研究 , 出引 人 负 荷传 感 技 术 调 节 系 统 压 力 的方 法 , 得 系 针 提 使
持 恒 定 ; 缸 同 步动 作 时 , 回路 流量 不 受 偏 载影 响 , 双 两 当输 入 信 号相 同时 , 缸 保 持 同步 。 双 关键 词 : 荷 传感 系统 ; ME i 负 A Sm模 型 ; 真 ; 步 仿 同
中 图分 类 号 : H1 7 T 3 文献 标 识 码 : B 文章 编 号 :0 8 0 1 ( 0 ) 3 0 2 — 5 10 — 8 3 2 1 0 — 0 2 0 1
An te c re t e s o h d e s v r e . S mu ain r s l v as t a e h i ge c l d r mo e , l a c a gn d e n’ d h o r cn s f te mo l i e f d i i i lt e u t r e l h t wh n t e sn l yi e v s o d- h n ig o s t o se n
( olg o e hns n l t nE g e r g C nrl o t U ie i ,h n sa 10 3 C ia C l e fM c a i a d Ee r n i ei ,e t S uh nvr t C a gh 4 0 8 , hn ) e m co n n a sy
Ab t a tT e e e r h i o h rb e o o r s n h nz t n p r r n e o w yi d r y r u i S n h nz t n s s m n e sr c : h r s ac s f r t e p o lm f p o y c r iai e o ma c f t o c l e s h d a l y c r iai y t o o f n c o o e u dr
pra la i a o.T em to f dut gtess m pesr yuigl d sni eh o g ta cnm k ess m f w ot f at lodsut n h e do ajs n yt rsueb s a -es g tcnl y h t a a et yt o u o i t i h i h e n o n o h e l