机器人综合技能比赛规则
职业技能大赛机器人制作竞赛方案

第十一届职业技能大赛“机器人制作”竞赛方案第一部分竞赛规程一、竞赛名称机器人制作。
二、竞赛目的通过竞赛,考察高职院校在机械结构技术、自动控制、单片机应用技术、信息技术等领域的理论教学与实践的成果。
普及机器人技术、展示高职院校在机器人项目的制作、控制与应用等领域的风采。
激发学生对机构组装、控制原理、传感器、编程技术等相关领域的学习兴趣,拓展学生视野,丰富学生知识,提升学生的综合素质。
本次竞赛提倡自主开发、自主设计、自主完成各功能模块的搭建。
培养队员独立思考能力、团队协作意识与组织管理能力;进一步推动自动化类、电子信息类以及计算机控制类专业的课程体系、教学体系、教学内容和教学方法的改革,提高高职院校的教学质量,促进高技能人才的培养工作。
三、竞赛方式和内容(一)竞赛方式竞赛采取团体竞赛方式,每支参赛队由2名选手组成,选手须为2014年同校在籍学生,其中队长1名,性别和年级不限。
(二)竞赛内容§1、机器人及参赛队伍相关信息机器人应该安装有便于裁判操作的启动与停止按钮。
每一个比赛队伍中,只允许有一台机器人报名参赛。
应明确每台参赛机器人的指导老师和参赛选手。
机器人命名:每台机器人必须取名,并粘贴于机器人身上,用于报名、登记、标示、识别。
姓名长度不超过5个汉字,2个字母/数字算一个汉字。
外形尺寸:尺寸形状要适应比赛场地,其水平面投影的尺寸小于200mm×300mm。
传感器:在不违反规则和规范的情况下,不限制机器人传感器的类型和数量。
动力:请在每组比赛点名前为机器人充好蓄电池。
点名检录后,不得充电。
其他:机器人不得伤害人,不得损坏场地、景点与环境。
§2、场地、路线、环境§2.1场地比赛场地约为2.4m×4.8m,采用背胶亚膜绿色喷绘,场地上引导线为黑色电工胶布黏贴。
场地线路有宽度约20mm的黑色引导线,用以引导机器人。
整个场地参考2014年驾驶员考试科目二的路线图设置,具体场地路线图如附图所示分为起止区、半坡起步区、侧方停车区、直角转弯及S转弯区、倒车入库区共五个部分组成。
机器人综合技能市赛规则说明
机器人综合技能市赛规则说明
1、比赛说明
●检录后参赛选手器材统一放在器材摆放区。
●整个比赛环节包括机器人现场拼装和编程完成任务两个部分,总共时间
2h。
现场拼装机器人得60分,如果选手放弃拼装机器人,选手必需在
40min后才能进场进行编程调试。
●比赛出场顺序,所有不确定的任务和位置现场随机抽取,由参赛选手抽取
决定。
●比赛共2轮,最后成绩为两次之和加上拼装机器人所得分数。
2、任务要求
比赛场地上规定了机器人要完成的任务(在4.1~4.8的任务中选定)。
神秘任务不做。
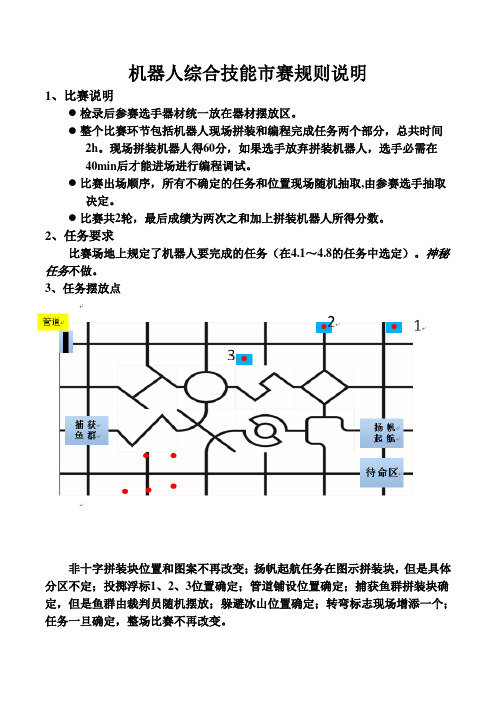
3、任务摆放点
非十字拼装块位置和图案不再改变;扬帆起航任务在图示拼装块,但是具体分区不定;投掷浮标1、2、3位置确定;管道铺设位置确定;捕获鱼群拼装块确定,但是鱼群由裁判员随机摆放;躲避冰山位置确定;转弯标志现场增添一个;任务一旦确定,整场比赛不再改变。
4、所有任务参照国赛标准进行打分判定。
5、比赛期间,凡是规则中没有说明的事项由裁判委员会决定。
竞赛组委会委托裁判委员会对此规则进行解释与修改。
本规则是实施裁判工作的依据。
在竞赛中,裁判有最终裁定权。
他们的裁决是最终裁决。
关于裁判的任何问题必须由一名学生代表在两场比赛之间向裁判长提出。
组委会不接受教练员或学生家长的投诉。
综合技能竞赛规则解析

6 清除月面障碍
目录
4.6.1 待清除的“障碍点”击用此去添掉加标标题签(或在罐外包一 层铝箔)的标准355毫升易拉罐表示,向上直立。罐 中装黄沙(不能采用液体),使重量达到500g。障 碍被布置在黑色引导线点或击此它添们加的标交题叉点上。 4.6.2 清理障碍的标准是把它移动到不再与黑色引导 线接触的地方。每成功清理一个障碍记20分,全部 清触理后加记计分。10分。机器人点击与此障添碍加所标在题 的拼装块脱离接 4.6.3 获得50分就算完成清理障碍任务。
记60分,标志超出原有拼装块扣10分,标志颠倒扣
10分。
点击此添加标题
4.7.3 得到50分即为完成树立标志任务。
第16页/共27页
8 回收设备
目录
4.8.1 机器人将定点点观击测此任添加务标放题置在观测点上的探测设 备模型放回自己身上。回收的模型不得与地面接触。
4.8.2 机器人与探测设备所在的分区脱离接触后记分。 回收一个探测设备记4点0分击此,添回加收标第题二个探测设备记20分, 与地面接触的探测设备不记分。
第18页/共27页
目录
10 休眠与唤醒
4.10.1 机器人到达某个规定的拼装块,机器人在地面 的投影应完全在该拼点装击块此内添,加标然题后静止不动(休眠), 在不短于10秒钟后,开始以一个规定的方式(旋转、 前进、后退、按一定的要求开/关1个LED等)在指定 的拼装块内动作(唤点醒击)此。添加标题 4.10.2 完成休眠任务记20分;完成唤醒任务记40分。 在唤醒后动作过程中,机器人与地面的接触点(面) 每超出拼装块一次,点扣击5此分添。加标题 4.10.3 获得50分就算完成休眠与唤醒任务。
• #5 有两条连接正方形相邻两边中点的圆弧形黑色引导线,圆弧半 径为250mm,拼装时可能旋转90°。
软银机器人杯中国机器人技能大赛相关方案

“软银机器人杯”中国机器人技能大赛相关方案比赛概况本大赛由中国人工智能学会主办,中国软银机器人公司协办,是一场面向高校学生、青少年及其他各类热爱机器人及AI领域的人员举办的大型机器人技能比赛。
本次大赛共有23项比赛项目,最终每项将评出一、二、三等奖。
除传统软银NAO 的高尔夫、跳舞、接力外,此次大赛在以往比赛项目基础上,新增软银Pepper 机器人应用项目。
NAO机器人高尔夫球比赛软银NAO 机器人将尝试10杆之内将高尔夫球打进目标洞中,本次提供3种分值不同的场地,最终成绩根据比赛得分排序。
NAO机器人接力比赛两台软银NAO 机器人将接力竞步,每台机器人行走6米,最终成绩按比赛用时多少排序。
NAO机器人舞蹈比赛软银NAO 机器人将在舞池中表演自选舞种,如独舞、双人舞、群舞等,裁判随机从选手准备的5段音乐中随机选择3首供NAO 表演,根据舞蹈动作等完成情况进行评分。
Pepper服务机器人竞赛使用软银人型机器人Pepper作为标准平台机器人进行编程,自拟应用方向。
参赛者需按要求进行开发和路演,包括但不限于健康养老、智能管家、安防、零售、金融、娱乐陪伴等场景。
NAO机器人简介NAO机器人是当前应用最广泛的教育机器人,由软银集团研发生产。
当前最新的是第六代——NAO power6.1.自由度25个:头部2个;手臂10个,各5个;胯部1个;腿部-10个,各5个;手部2个,各1个。
2.音频:2个扬声器:音频范围100HZ to 10kHZ;输入=2W;4个扩音器3.致动器:36个霍尔效应传感器,12位精确度,不少于五种类型直流空心杯电机。
4.传感器 36个霍尔效应传感器;一个三轴陀螺仪;一个三轴加速计;2对碰撞传感器;2对声纳,检测范围:0.20m~0.80m;2个红外线传感器,发射角:+/- 60°。
摄像头:2个,有效像素500万,聚焦范围:10cm ~无限远,自动对焦,;压力传感器:0-25N,每只脚上4个;眼部:全彩RGB发光二极管。
青少年机器人综合技能比赛细则
倒下的骨牌数只要大于等于10,就是完成了多米诺 骨牌任务。
点球大战
在某个拼装块上有一个内 高80mm、内宽140mm、深 40mm的黑色球门。在以球 门中央为圆心、400 mm为 半径的圆弧上有3个放在小 橡皮圆环上的桔黄色乒乓 球。其中一个球正对球门 中央,另两球分居两边, 与第一个球相距不超过 150mm,如图3所示。机器 人每次只能把1个球踢进球 门,已经离开橡皮圆环的 球不能再踢。
经过比赛,学生们不仅完成自己的比赛机器人, 也提升了对科技的认识,利用科技来积极影响周 围世界。
机器人要从待命
综合技能比赛任务与规则 区启动,完成任
务后还要回到待
命区
场地中央有放置8块可换
拼装块的位置。可换拼装
比赛场地示意图(待命区的位置块前只的公是数布量。示和如意具果体可位换)置拼在装赛块
在中国青少年机器人竞赛中设置机器人综合技能比 赛的目的是检验青少年对机器人技术的理解和掌握 程度,激发我国青少年对机器人技术的兴趣,培养 动手、动脑的能力。
综合技能比赛主题 第十一届的三个比赛 场地都是一样的
第十二届机器人综合技能比赛的主题为 “机器人嘉年华”
比赛中,参赛队要在三个有不同任务的场地上运 行自己的机器人,机器人从待命区出发,在尽可 能短的时间内展示自己的各种技能,完成规定任 务,获取尽可能高的得分。
不足8块,由带黑色十字
引导线的固定拼装块补足
机器人要完成的任务 一般分布在场地周围 的16块带黑色十字引 导线的固定拼装块中。
机器人待命区 (十如字图或1丁)字:交长叉 5处0转0m弯m标、志宽(如 5图020)mm:的机锥器台人机在 器遇人到要转从弯待标命志区时 启应动按, 图完示成正任确务动 后作还通要过回转到弯待标命志。 区。
福建省第十二届机器人比赛“综合技能竞赛规则”实施细则
福建省第十二届机器人比赛“综合技能竞赛规则”实施细则一、机器设备部分:1、机器人启动时,机身大小长、宽、高分别不超过25cm、25cm、30cm,启动后,机器人伸展的尺寸可以突破这个限制。
2、机器人上不得安装会破坏场地、道具的部件,不得采用破坏性的动作去完成各项比赛任务(如用尖锐部件去扎比赛道具,用黏胶去粘取比赛道具,都是不允许的)3、机器人在进入比赛场地之前,都必须拆散到最小单位,除电气设备保持出厂原样外,所有结构件上的所有螺丝都必须拆下。
4、比赛中,机器人不得故意将身上的原件或策略物丢弃在场地上,否则视为技术犯规。
二、竞赛通则部分:1、机器人可以从待命区四个方向中的任意方向出发,也可以从四个方向中的任意方向回待命区2、机器人必须沿黑色引导线行走。
在十字拼装块内完成任务时,机器人可以脱线。
3、重试时,选手只要向裁判员发出“重试”申请后,就可以立即拿起机器人,并从待命区重新启动出发。
重试某个任务时,机器人身上与该任务有关的道具必须由学生放回原位并保持原有姿态,该任务已得分数清零。
如重试的是有连带关系的任务(如上学和交流讨论、少年宫活动一起完成),则连带的所有任务的得分都清零。
如果没有特别强调重试某个任务,则视为重试其他线路,已完成的任务的得分有效,机器人身上携带的道具是否清除由选手自行决定,但在操作中从机器人身上掉落下来的道具(包括“学生”模型),不可以重新再人为装回机器人身上。
4、所有任务的完成状态均不需要保持到比赛结束。
只要机器人完成某个任务后有1-2秒的停顿,裁判员即可计算该任务的得分。
5、所有已经完成任务的道具,经裁判员允许,可以由裁判或选手将其移到不影响机器人运行的位置(“点球”任务中的球门道具不可移动)。
6、完成场上所有任务(每个任务至少得50分)后,比赛用时还未达到150秒,才可以有时间分。
一气呵成,完成全部的任务,可获得50分的奖励。
三、竞赛任务部分:1、在比赛过程中,除上学、交流讨论和少年宫活动等三个任务由关联性外,其他任务相对独立,没有必然的关联性。
建筑机器人比赛规则

建筑机器人比赛规则
1. 比赛类别,建筑机器人比赛通常分为不同的类别,例如自动
化建筑、模型建筑、拼装建筑等。
每个类别都有特定的要求和规则。
2. 机器人规格,参赛机器人通常需要符合特定的尺寸和重量限制。
这些规格限制旨在确保比赛的公平性和安全性。
3. 任务和挑战,比赛通常会设定一系列任务和挑战,例如模拟
建筑施工、拼装建筑模型、搬运建筑材料等。
参赛机器人需要完成
这些任务并且在规定的时间内达成目标。
4. 安全规定,比赛中通常会有严格的安全规定,确保机器人操
作和设计不会对参赛者和观众造成危险。
5. 评分标准,评分标准会根据比赛的不同阶段和任务而有所不同。
通常会考虑机器人的完成时间、准确性、效率以及是否符合任
务要求等因素。
6. 禁止物品,比赛通常会明确禁止某些物品或行为,例如使用
危险化学品、超出规定尺寸的机器人等。
7. 公平竞赛,比赛组织者会确保比赛的公平性,禁止作弊行为,并对违规行为进行处罚。
总的来说,建筑机器人比赛的规则旨在确保比赛的公平性、安
全性和挑战性,同时也鼓励参赛者发挥创造力和技术水平。
不同的
比赛可能会有不同的规则和要求,参赛者需要在比赛前仔细阅读并
遵守相关规定。
第十六届山东省职业院校技能大赛高职组“机器人系统集成应用技术”赛项规程
第十六届山东省职业院校技能大赛高职组“机器人系统集成应用技术”赛项规程一、赛项名称赛项名称:机器人系统集成应用技术赛项组别:高职组(教师赛)赛项归属产业:装备制造大类二、竞赛目的本赛项对接工业机器人系统集成新技术发展需求,针对高等职业院校装备制造类专业人才培养目标,融入P1C控制技术、虚拟调试技术、机器视觉技术、工业网络技术、工业机器人现场编程和离线编程技术、MES技术、人工智能技术等工业机器人系统集成技术。
通过竞赛,一方面培养老师机器人系统集成应用综合实践技能,更好的实现以赛促教、以赛促学,岗课赛融通,提高智能制造领域技术技能人才培养质量,同时检验和展示高职院校工业机器人技术等专业教学改革成果;另一方面引领和促进高职院校专业教学改革,实现校企合作、产教融合,促进产业新技术转化为竞赛设备和竞赛资源,实施“岗、课、赛、证”融通,开展课程和教学资源建设,提升职业教育影响力,激发和调动行业、企业关注和参与专业教学改革的主动性和积极性,提升高职院校复合型技术技能人才培养水平,为山东省“机器换人''培养大量的工业机器人技术应用领域高素质技术技能人才,服务山东省制造强省战略。
三、竞赛内容本赛项主要覆盖工业机器人本体制造、系统集成和生产应用类企业中的工业机器人操作编程、安装调试、系统集成和运行维护等岗位,主要考察选手的工业机器人、可编程序控制器、数控系统、机器视觉等智能装备的操作编程能力,以机器人为主要作业单元的系统集成能力,以及虚拟调试软件、MES系统的应用能力。
本赛项采用团体比赛方式,每支队2名选手在5小时内,以现场操作的方式,根据赛场提供的有关资料和赛项任务书,完成任务书要求的内容。
具体的竞赛内容和成绩占比如下:(一)机器人系统方案设计和仿真调试(40%)1系统方案设计和仿真调试(30%)(D系统方案设计。
根据竞赛任务,设计工业机器人及周边设备整体方案。
(2)系统仿真搭建.根据整体方案,在虚拟仿真系统中搭建由工业机器人、数控、工具、仓储、分拣、检测等组成的机器人集成应用系统。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器人综合技能比赛规则
机器人综合技能比赛规则是为了促进机器人技术的发展和创新,提供一个平台让机器人制造商和开发者展示他们的成果。
以下是机器人综合技能比赛的规则:
1. 参赛机器人要符合相关规定:机器人必须是自主操作的,不能依赖外部遥控器或人为干预。
2. 参赛机器人的尺寸和重量要符合规定:机器人的尺寸和重量限制依据比赛的分类而定,参赛者需在规定的限制范围内设计和制造机器人。
3. 比赛场地的要求:比赛场地应是一个合适的封闭空间,供参赛机器人进行各项技能测试。
场地上应设置各种挑战和障碍,以测试机器人的技能和反应能力。
4. 比赛项目的设定:机器人综合技能比赛通常包括多个项目,如速度比拼、定向导航、障碍逾越等。
每个项目都有相应的任务和要求,参赛机器人需要按照规定完成。
5. 评判标准和计分规则:比赛的评判标准应该明确,根据参赛机器人在各个项目中的表现进行打分。
评委应该对机器人的速度、准确度、智能反应能力以及面对困难的解决能力进行评估。
6. 安全措施和风险管理:比赛组织者需要确保比赛场地的安全,并制定相应的安全措施。
参赛机器人的设计和操作也需要符合相应的安全规定,以避免可能的风险和伤害。
7. 参赛者的要求:参赛者应该具备相应的机器人设计和操作技能,能够独立完成机器人的制作和调试工作。
参赛者应该遵守比赛规则和道德规范,不得采取作弊行为或恶意破坏比赛秩序。
机器人综合技能比赛规则的目的是为了鼓励机器人技术的创新和发展,提高参赛者的技术能力。
通过比赛的竞争和交流,参赛者能够互相学习和分享经验,促进机器人技术的进步和应用。