捷联惯导系统导航算法研究
航母舰载机捷联惯导系统自主对准算法流程研究

航 母 舰 载机 捷 联 惯 导 系 统 自主 对 准 算 法 流 程 研 究
袁 涛 , 曲志 刚 , 徐 景硕 , 刘 关 洁
( 海军航空工程学 院青岛校区 , 山东 青 岛 2 6 6 0 4 1 )
摘
要: 随 着 我 海 军 现 代 化 进 程 的不 断发 展 , 舰载武器倍 受关注 , 但 风 浪 等 因素 影 响 产 生 的 航 母 摇 摆 晃 动 , 会
c a u s e o f t h e wa v e,t he s e a b r e e z e e f f e c t c a us e s t h e c a r r i e r d e c k s wi n g a n d s wa y. Th i s b r i n g s di fi c ul t y t o c a r r i e r ai r c r a f t i n e r t i a l n a v i g a t i o n
第 3 3卷
第 2期
弹
箭
与
制
导
学
报
V0 1 . 3 3 No . 2 3年 4月
J o u r n a l o f P r o j e c t i l e s ,R o c k e t s ,Mi s s i l e s a n d Gu i d a n c e
力加速度矢量信息 , 根据这一思路 , 文 中 给 出 了基 于 重 力 加 速 度 积 分 矢 量 的解 析 自主 粗 对 准 和 自主 精 对 准 的
算法 流程。理论分析和仿真结果表 明 , 该 运 动 基 座 上 捷 联 惯 导 自对 准 方 法 能 有 效 解 决 舰 船 系泊 状 态 下 舰 载 机
激光陀螺捷联惯导系统导航算法设计
压
电
与
声
光
Vo _ 2 No 6 I3 .
De. 2 0 c O1
PI OEIEC EZ TRI & AC CS OUS )) T((PTI CS
文章 编 号 :0 4 2 7 ( 0 0 0 — 9 5 0 1 0 — 4 4 2 1 ) 60 6 — 5
SNS导 航算 法 , 括 姿 态 更 新 算 法 、 度 更新 算 法 和 位 置 更 新 算 法 。 在 姿 态 更 新 算 法 中考 虑 圆锥 补 偿 算 法 , 导 I 包 速 推 了等 效 旋 转 矢 量 的 递 推 算 法 ; 速 度 更 新 算 法 中考 虑 划 船 误 差 补 偿 算 法 , 导 了划 船 误 差 补 偿 递 推 算 法 。大 量 的 在 推 车 载 实 验 表 明 , 设 计 各 部 分 的算 法 能协 调一 致 工 作 , 决 了 R I 所 解 I SNS高 速 姿 态 和 速 度 更 新 与 导 航 计 算 机 速 度 G 间 的 矛 盾 , 证 了 系统 在 高 动态 条 件 下 的 导 航 算 法 精 度 , 充 分 发 挥 激 光 陀 螺 的 优 势 , 高 RL I 保 可 提 G SNS的 导 航 精
XI o ,QI n y a EB N Yo g u n ,W AN Ya h i n u。
( . D e t o u o a i Co r l 1 p . fA t m tc nt o ,N o t w e t r l t c n c lU n v r iy, Xi a 1 07 , Ch na rh s e n Po y e h ia i e st ’n70 2 i ;
度。
高动态环境下的捷联惯导系统姿态算法的研究
M U Shu z .BU o — hu.LIY o - n —hi Xing z ng xi
( c o l fMe h nclEn ie r g S h o c a ia gn ei .NUS o n T.Na jn 1 0 4. ia n ig 2 0 9 Chn )
捷联惯导_星敏感器组合导航技术研究

惯性坐标系之间的转换关系是能够实时计算得到 的 ,所以本文即认为在经过一系列坐标变换以后 ,星 敏感器最后输出的是本体坐标系相对于地理坐标系 的相关姿态信息 。
3 组合导航系统工作原理
捷联惯导系统 SI N S /星敏感器 CCD 组合导航 的工作原理见图 1。捷联惯导系统和星敏感器分别 输出飞行器的姿态转换矩阵信息 。经坐标变换后 , 卡尔曼滤波器接收两个导航子系统输出的相对导航 坐标系的姿态转换矩阵元素的差值 , 同时将捷联惯 导系统输出的姿态转换矩阵中的元素作为组合导航 系统测量矩阵的相应数据 。通过采用 Kalm an 滤波 反馈校正的方式对捷联惯导系统和星敏感器输出的 姿态转换矩阵信息进行数据融合 , 估计出系统的各 个误差状态量 ,然后用系统误差估计值去校正捷联 惯导系统力学编排中的相应导航参数 , 即将系统误 差估计值反馈到捷联惯导系统的内部 , 最后输出有 关飞行器导航参数的最优估计 。
Oct12005 Vol123, No. 5
航 天 控 制 Aerospace Control
・31・
捷联惯导 /星敏感器组合导航技术研究
王 鹏 张迎春 强文义 张荣林
哈尔滨工业大学卫星技术研究所 , 哈尔滨 150001
3
摘 要 针对在捷联惯导系统中陀螺的误差存在随着时间积累而逐渐增大的缺 点 ,提出了捷联惯导系统 +星敏感器的组合导航方案 , 并进行了仿真及结果分 析 。以 Kalm an滤波为基础 ,通过将捷联惯导系统和 CCD 光学传感器所测得的 飞行器相关姿态信息进行数据融合 ,估计出组合导航系统的误差状态量 ,进而修 正捷联惯导系统的位置 、 速度和姿态角 。详细推导了捷联惯导 +星敏感器组合 导航的算法 ,并通过对仿真结果的分析证实了该方案的可行性和算法的有效性 。 主题词 捷联惯导系统 星敏感器 组合导航 卡尔曼滤波 中图分类号 : V249. 3 文献标识码 : A 文章编号 : 1006 2 3242 ( 2005 ) 05 2 0031 2 06
捷联惯导基组合导航研究与发展趋势

工程设备与材料 117工程技术研究 第7卷 总第109期 2022年3月
捷联惯导基组合导航研究与发展趋势
夏秀玮哈尔滨工业大学(鞍山)工业技术研究院,辽宁 鞍山 114018
摘要:捷联惯导基组合导航具有精度高、可靠性高、实时性强等特点,在军事领域应用潜力大,但一直以来,传统的捷联惯导基组合导航存在的主要问题是实时性、可靠性和高精度难以高度兼容,因此限制了其应用发展。鉴于此,文章简要概述了捷联惯导基组合导航的原理和特性,综述了捷联惯导基组合导航的应用现状,并对捷联惯导基组合导航今后的发展趋势进行了展望,旨在为捷联惯导基组合导航在军事和民用产业的发展应用提供一定的理论指导。关键词:GPS;捷联惯导;组合导航Abstract: Strapdown Inertial Navigation System(SINS) based integrated navigation has the characteristics of high pre-cision, high reliability and strong real-time performance, and has great application potential in the military field. However, the main problem of traditional Strapdown Inertial Navigation System based integrated navigation is that it is difficult to be highly compatible with real-time performance, reliability and high precision, which limits its application development. In view of this, this paper briefly summariz-es the principles and characteristics of Strapdown Inertial Navigation System based integrated navigation, summarizes its application status, and prospects its future development trend, aiming to provide some theoretical guidance for the development and application of Strapdown Inertial Navi-gation System based integrated navigation in military and civilian industries.Key Words: GPS, Strapdown Inertial Navigation System, in-tegrated navigation分类号:TN967.2 Research and Development Trend of Strapdown Inertial Navigation System Based Integrated NavigationXia XiuweiHIT(Anshan) Institute of Industrial Technology, Anshan, Liaoning 114018作者简介: 夏秀玮,男,博士,工程师,研究方向为现代舰船综合导航技术。036 .DOI:10.19537/j.cnki.2096-2789.2022.05.现代战场大多采用信息化作战方式,对信息的掌握和控制能力对战争的成败十分关键。导航系统作为精确打击武器的主要核心部件之一,在路面车辆、航母、飞行器等领域都得到了广泛应用。因此,近年来,世界各国都十分重视导航系统的开发与应用,特别是对军用导航系统提出了更高的要求,不仅要具有较高的精度,还应该能够实时掌握所处的位置和方向信息,具有使用方便,易于操作,可靠性强,成本低,系统能耗低,以及较强的环境适应性等优点。GPS卫星发射的定位信号能实现高精度的定位,其中,动态定位精度达到亚米级,静态定位精度在毫米级,速度测量精度在厘米级,时间测量精度在毫微秒级[1]。捷联惯导是一个信息解调和信息变换系统,是非线性系统,但捷联惯导存在的较大问题就是误差会随着时间的延长而加大,并且系统易受到外界环境的干扰,影响运行稳定性,因此,无法投入实际应用[2]。近几年,将GPS与捷联惯导进行组合可实现二者互补,从而实现优异的功能,这主要是因为GPS和捷联惯导的误差特性是互补的,并且在其他参数特性上也体现出一定的互补性。通常来讲,GPS能够输出位置和平均速度数据,而不能够输出瞬时速度的数据,测量频率也相对较低;捷联惯导可以输出瞬时速度数据,频率相对更高。可见,GPS和捷联惯导的组合可以构建一个稳定性高、自主性强及高频输出的导航系统[3]。
捷联惯导

坐标系的定义
1. 地理坐标系(下标为t)—— OXtYtZt :O 取载体质心,Xt 轴指向东,Yt 轴指向北,Zt 轴沿垂线指向天。 2. 导航坐标系(下标为n)—— OX nYnZn :O 取载体质心,Zn与 Zt 重合,Xn 与 Xt,Yn 与 Yt 相差一个游动方
C13
C23
C33
位置速率
p ep
位置速率是由飞行器地速的水平分量引起的,由于平台坐标系与地理坐标系相差 一个游动方位角,
可得:
VVENtt
cos sin
sin cos
VEp VNp
p ep
可写成
p epE
C32 C31
180 ,180
1.求纬度的真值L
L L 反正弦函数的主值域与L的定义域一致,因此:
主
2.求经度的真值
反正切函数的主值域是 90 ,90 与 的定义域不一致,因此需要在 的定义域内确定经度的真值。
由: 主
tan 1
C32 C31
tan 1
cos L sin cos L cos
其中:
.
V ep 平台系相对地球的加速度向量
f 加速度计测量的比力向量
2ie ep V ep 无明显物理意义,又称有害加速度
g 重力加速度向量
整理上式可得:
.
VEp
.
VNp
.
VUp
f
p E
导航原理_捷联惯导系统
导航原理作业(惯性导航部分)一枚导弹采用捷联惯性导航系统,三个速率陀螺仪Gx,Gy, Gz 和三个加速度计Ax, Ay, Az 的敏感轴分别沿着着弹体坐标系的Xb, Yb, Zb轴。
初始时刻该导弹处在北纬45.75度,东经126.63度。
第一种情形:正对导弹进行地面静态测试(导弹质心相对地面静止)。
初始时刻弹体坐标系和地理坐标系重合,如图所示,弹体的Xb轴指东,Yb轴指北,Zb轴指天。
此后弹体坐标系Xb-Yb-Zb 相对地理坐标系的转动如下:首先,弹体绕Zb(方位轴)转过-10 度;接着,弹体绕Xb(俯仰轴)转过15 度;然后,弹体绕Yb(滚动轴)转过20 度;最后弹体相对地面停止旋转。
请分别用方向余弦矩阵和四元数两种方法计算:弹体经过三次旋转并停止之后,弹体上三个加速度计Ax, Ay, Az的输出。
取重力加速度的大小g = 9.8m/s2。
第二种情形:导弹正在飞行中。
初始时刻弹体坐标系仍和地理坐标系重合;且导弹初始高度200m,初始北向速度1800 m/s,初始东向速度和垂直速度都为零。
陀螺仪和加速度计的输出都为脉冲数形式,陀螺输出的每个脉冲代表0.00001弧度的角增量。
加速度计输出的每个脉冲代表1μg,1g = 9.8m/s2。
陀螺仪和加速度计输出的采样频率都为10Hz,在200秒内三个陀螺仪和三个加速度计的输出存在了数据文件gaout.mat中,内含一矩阵变量ga,有2000行,6列。
每一行中的数据代表每个采样时刻三个陀螺Gx, Gy, Gz和三个加速度计Ax, Ay, Az的输出的脉冲数。
格式如下表(前10行)将地球视为理想的球体,半径6371.00公里,且不考虑仪表误差,也不考虑弹体高度对重力加速度的影响。
选取弹体的姿态计算周期为0.1秒,速度和位置的计算周期为1秒。
(1)请计算200秒后弹体到达的经纬度和高度,东向和北向速度;(2)请计算200秒后弹体相对当地地理坐标系的姿态四元数;(3)请绘制出200秒内导弹的经、纬度变化曲线(以经度为横轴,纬度为纵轴);(4)请绘制出200秒内导弹的高度变化曲线(以时间为横轴,高度为纵轴)。
车载捷联惯导系统定位测姿算法研究
第15卷第l期2007年2月中国惯性技术学报JoumalofChineseInertialTcchnologyVbl.15No.1Feb.2007文章编号:1005-6734(2007)01一0024-04车载捷联惯导系统定位测姿算法研究陈允芳1,叶泽田2,钟若飞3(1.山东科技大学地球信息科学与工程学院,青岛266510;2.中国测绘科学研究院,北京100039;3.首都师范大学,北京100037)摘要:GPs/INs组合精确测定平台的位置和姿态是移动测图系统中的重要模块。
对陀螺仪和加速度计所测角速度和比力进行两次积分得载体姿态、速度和位置即sINs力学机械编排。
目前该过程大多在地理坐标系进行。
这里详细推导了地球坐标系中完整的解算过程,以四元数姿态矩阵更新及重力计算为核心,由IMu原始观测值解算出了载体位置、速度和姿态等参数,可快速高效与GPs输出的位置速度信息进行组合滤波处理,可据此编程进行工程应用数据处理。
关键词:捷联惯导系统;姿态矩阵;坐标转换;力学编排;四元数中图分类号:u666.1文献标识码:APositioningandorientationcomputationonVehicle-borneSINSanddiscussofcalculationerrorcHENYun.‰91,YEze-tian2,zHONGRuo.fei3(1.Geo·info衄ationScience&EngineeringCollege,ShandongUniverSi哆ofScienceaIldTbchnology,Qingdao266510,China;2.SurveyingaTldMappingScienceResearchInStituteofChina,Beijing100039,China;3.C印italNomlalUniverSi劬Beijing100037,China)Abstract:GPSandINSintegratedtoaccuratelydeteminingpositionaIldattitudeofnatI‘oofisVitalmoduleinmobilemappingSystem.Specincforcc行omspeedometer蚰d舭glerate矗om留roareinte铲atedtwicerespectiVelytoachievean沁de,veloc时aIldpositionn锄elySINSmechaIlization.Currentlythistookplacedingeogr印hiccoordinate,whiIeheredemonstratedindetailmewholemechaJlizationineanll-centclrcdearth-fixedcoordinate,mostlyquatemiona钍itudematrixupdating锄dgravit)rcaIculation.Ultimatelyvehiclenavigationpar锄eterssuchaSattitude,veIocity锄dpositionwercgahed丘omIMUorigin“0bservations.Mathematicsplatfo眦isfomlcdinSrNStocarryoutsuⅣeyingaJldcalculatingpreciselythenavigationmoVementpar锄cterS.Theresultsarcpronetointe黟atewitllsimilarpammeters疔omGPStofilterprocessing.Pro可锄minghercbyc锄pmcessdatainengineeringapplicationKeywords:SINS;attitudematrix;coordinatetransfomation;mechanization;quatemion随着惯性技术与卫星导航定位技术的发展,由GPS/INs不同程度组合而成的定位定姿传感器已成为移动测图系统中确定载体轨迹和平台姿态的重要工具,其中GPs多用于定位而INS则用于测姿。
惯性导航_第5章
武汉大学测绘学院 卫星应用研究所
2.动态差模型
对于陀螺 的一个轴 ,其表达 式为
D1 D2 D3 D4 D5 D6 dx 2 x y z x y z
2 2 2 D 7 D D D10 D11 D12 x 8 y 9 z x y y z x z
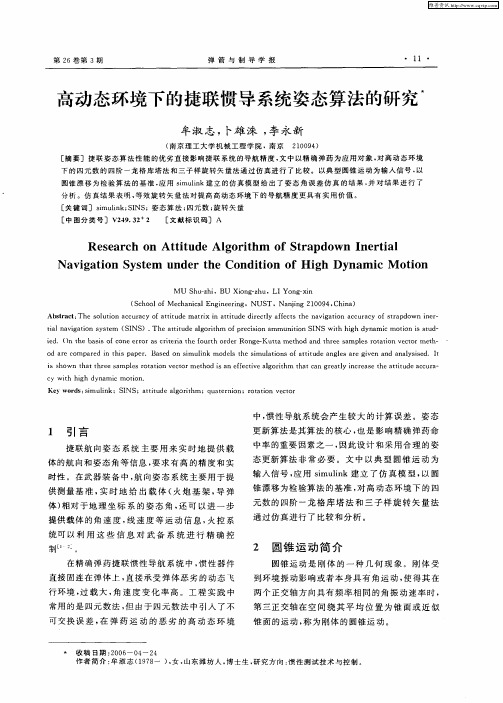
姿态矩阵计算
迭代次数
NO
导航计算
控制信息计算
结束
武汉大学测绘学院 卫星应用研究所
一、系统的初始化
系统的初始化包括三项任务:
1.给定飞行器的初始位置和初始速度等初始信息。 2.数学平台的初始对准:确定姿态矩阵的初始 值,是在计算机中用对准程序来完成的。在物理概 念上就是把“ 数学平台” 的平台坐标系和导航坐标系 相重合,称其为对准。 3.惯性仪表的校准:对陀螺的刻度系数进行标 定,对陀螺的漂移进行标定。对加速度计标定刻度 系数。
式中
、 、 、 、 、 分别为 飞行器相 对惯 x y z x y z
性空 间沿陀螺 三个轴的 角速度 及角加速 度分量 (弧 度/S 、 弧度 /S )。D 4 为 刻度系数,D 4 x 为陀螺 的正常 输出值,其它 名项 为误 差项,对 应的系数 D l 至 D12 为动 态误差系 数。
b b 、 a 一—沿飞 行器 坐标 ib ib
系表 示的 陀螺及 加速度 计输 出的 原始测量 值;
b b 、aib 一—误 差 补 偿后 的 ib
陀螺 及加速度 计的输出 值;
b b 、 aib —— 由误差 模型 ib
给出 的陀 螺及加 速度计 的估 计 误 差 ( 包 括静 态 和 功 态 误 差项 )。
武汉大学测绘学院 卫星应用研究所
船用捷联惯导系统的快速阻尼导航算法
Ab s t r a c t :I n o r d e r t O e l i mi n a t e t h e S c hu l e r p e r i o d i c o s c i l l a t i o n a n d Fo u c a u l t p e r i o d i c o s c i l l a t i o n o f t h e ma —
r i n e s t r a p d o wn i n e r t i a l n a v i g a t i o n s y s t e m ( S I NS ),t h e d a mp i n g e q u a l i z e r i n t h e l e v e l l o o p i s i n t r o d u c e d . Ho we v —
e r ,a f t e r t he i n t r o d u c t i o n o f d a mp i n g e q u a l i z e r ,t h e r e wi l l b e a l o n g s e t t l i n g t i me b e f o r e t h e s y s t e m a c h i e v e s s t e a d y,d u r i n g wh i c h t h e s y s t e m wi l l ha v e o v e r s h o o t p h e n o me n o n t h a t ma k e s t he s y s t e m p e r f o r ma nc e c a nn o t b e g u a r a n t e e d .I n o r d e r t o r e d u c e t h e s e t t l i n g t i me,t h e b a c k wa r d c a l c u l a t i o n wh i c h f o r ms r o u n d — r o b i n a l g o r i t h m
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
哈尔滨工程大学硕士学位论文捷联惯导系统导航算法研究姓名:王晓迪申请学位级别:硕士专业:精密仪器及机械指导教师:孙枫20070301哈尔滨工程大学硕士学位论文摘要在捷联惯导系统中,陀螺与加速度计的测量轴沿载体轴安装。由于载体的机动过程中载体轴在空间位置的变化,引起测量轴的角振动和线振动。导航参数的更新时存在着不可交换性误差。对于姿态算法称为圆锥误差;对于速度算法称为划船误差;对于位置算法称为涡卷误差。本文首先介绍了捷联惯导系统的常用的坐标系与基本工作原理。并通过设计各种捷联补偿算法,有效地减小了不可交换性误差。捷联姿态算法研究。分析了圆锥误差,研究基于四元数和基于旋转矢量的姿态更新算法,推导了优化的圆锥补偿算法与圆锥项递推补偿算法,并提出一种适合于工程的双子样二次迭代算法。通过仿真分析了各种算法的性能优劣。捷联速度算法研究。在典型划船环境下,对各子样划船算法进行优化,使它们的误差漂移率达到最小。并推导了迭代划船补偿算法与递推划船补偿算法,仿真比较了各种算法的计算精度。位置更新算法。分析了位置更新计算中涡卷误差的产生机理。研究了划船运动条件下的涡卷补偿优化算法。
关键词:捷联惯导系统;姿态更新;速度更新;圆锥误差;划船误差哈尔滨工程大学硕士学位论文ABSTRACTThemea¥ul!eaxesofgyrosandacamlerometersaremountedtothevehicledirectlyinstrapdowninertialnavigationsystem(SINS).Because
of
vehicle’S
dynamics,angularandlinearvibrationsofthemedieaxesw砌dbearised.Thatresultinthenoncommutativityduringthecompulationofnavigationparameters.
ThenoncommumtivitiesarccalledbyconingelTorinattitudealgorithm,scuIling
invelocityalgorithmandscrollinginpositionalgorithmrespectively.This
thesis
introducedusualfranl08andthe
basictheoryforSINS.Several
strapdown
algorithmswel'edesignedtoreducethenoncommutativityeffectively.Studyonattitude-updatingalgorithm.Coningerl'Ol'SⅥ伽analyzedhere.
Attitude.updatingalgorithmbasedonquatcmionandrotationvectorwffrestudied
respectively.Afteroptimizingsample·compensationalgorithmsanddeducing
∞currentalgorithm,atwo-ampleiterationalgorithmwasderived.Simulationswereusedtoanalyzethepcd疏m撇ofeachalgorithm.
Studyonvelocity-updatingalgorithm.Makingvariouskindsofalgorithm
optimizedundertheclassicalscullingenvironment.Thatminimizestheexcursionrate.Theiterationcompensationalgorithmandreerrentcompensationalgorithm
werededuced.Thecomputationalaccuracyforeveryalgorithmwasevaluated
throughsimulations.StudyonPosition-updatingalgofithnLThescrollingerrorintheposition
updatingcalculationisdiscussedandthescrollingcompensationalgorithmsa∞
ovtinlizeduadertheclassicalsculling
environment.
Keywords:StrapdownINS;Attitudeupdate;VelocityUpdate;ConingError;
ScullingError哈尔滨工程大学学位论文原创性声明
本人郑重声明:本论文的所有工作,是在导师的指导下,由作者本人独立完成的。有关观点、方法、数据和文献的引用已在文中指出,并与参考文献相对应。除文中已注明引用的内容外,本论文不包含任何其他个人或集体已经公开发表的作品成果。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律结果由本人承担。
作者(签字):乏盛堕日期:7年易月z日啥尔滨工程大学硕士学位论文1.1惯性导航简介第1章绪论
导航(Navigation)就是正确的引导载体沿着预定的航线在规定的时间内到达目的地。这就需要随时知道载体的瞬时位置、速度、姿态、航向等参数。在众多的导航系统中,惯性导航系统是一种真正意义上的自主式的导航系,但实现导航定位的原理非常简单,它是利用惯性敏感器、基准方向机最初的位置信息来确定运载体的方位、位置和速度的自主式航位推算导航系统。惯性导航是自主式导航系统,它完全是依靠载体自身设备独立自主地迸行导航它与外界不发生任何联系,所以他隐蔽性好,工作不受气象条件和人为的外界干扰等一系列的优点。由于它的完全自主性,惯性导航已广泛应用于航天、航空、航海等许多民用领域,成为且前各种导航体上应用的一种主要导航设备,能够提供精确的姿态和多种导航信息。我国的惯性导航系统的研制从70年代开始,经过三十多年的预研与技术攻关,走过了从液浮(陀螺、加速度计)到挠性、从平台到捷联、从纯惯性导航到惯性/Gps组合导航的过程。目前,我国自行研制的第一代中等精度、高等精度挠性平台式惯性导航系统己发展成~个系列,并已经批量装机使用,低成本、中等精度的挠性捷联惯导已经进入生产。目前由于受国内制造工艺技术水平的限制和国外技术先进国家的技术封锁,高等精度的激光陀螺、光纤陀螺还处在研制阶段,微机械惯性仪表还处在发展的初级阶段。惯性导航系统分为两类,即平台式和捷联式。平台系统在早期的航海、航空、航天以及陆用的高精度导航、制导中几乎一统天下.一直到70年代,随着计算机、微电子以及控制等新技术在惯性技术领域的应用,出现了捷联式惯性系统,平台系统受到了强有力的挑战。捷联系统发展的历史可以追溯到1942年v.2导弹的制导装置,它把一个自由陀螺仪固定在弹体上,让陀螺仪的主轴对准导弹的飞行方向,直接利用陀螺仪的定轴性,导弹稍一偏离飞行航向陀螺仪就带动控制机构改变导弹的方向,回到预定的弹道上来。惯性哈尔滨工程大学硕士学位论文元件直接固联在弹体上敏感导弹的角运动,从这点上可以算作捷联式惯性导航系统的雏形,是一种位置捷联装置。1970年,捷联系统作为宇宙飞船的应急备份装置,在阿波罗一13服务舱发生爆炸时将飞船引导到返回地球的轨道上,起了决定性的作用。捷联式惯性导航系统是把惯性敏感器(陀螺仪和加速度计)直接安装在运载体上,利用惯性敏感器、基准方向及最初的位置信息来确定运载体的方位、位置和速度的自主式船位推算导航系统。与平台式惯性导航系统相比,捷联式惯性导航系统省略了精密的稳定平台和控制机构,使系统的设计极大简化,成本大幅度降低,并且具有易于安装和维护;能够提供更多的导航和制导信息;有利于提高系统的性能和可靠性。由于捷联惯性器件直接固联在载体上,载体的机运动会直接影响系统的精度。有些误差因素,如载体的角振动和线振动所引起的圆锥误差、划船误差等,必须通过设计合适的姿态更新算法和导航更新算法来解决。因此,捷联惯导系统中导航算法的研究具有一定的意义。
1.2国内外研究动态由于捷联惯导系统采用数学平台,即在计算机中通过实时计算出姿态矩阵,建立起数学平台,所以姿态更新计算是捷联惯导系统的算法核心,也是影响其精度的主要因素。传统的姿态更新算法有欧拉角法、方向余弦法和四元数法。其中四元数法简单,计算量小,因而在工程实际中经常采用。但在四元数法中不可避免地引入了不可交换误差,特别是在载体处在高动态环境时,这种误差就会很大,必须采取有效措施加以克服。1971年,Bortz[。1和Jordonl91最早提出了等效旋转矢量概念用于陀螺输出不可交换性的修正,从而有效的解决了不可交换误差问题。其后的研究就主要集中在旋转矢量的求解上。根据在相同姿态更新周期内,对陀螺角增量等间隔采样数的不同,有双子样算法、三子样算法等。为减少计算量,1980年,GilmoreI”】提出了在等效矢量的迭代计算采用较高频率的快速回路和用了等效旋转矢量后的方向余弦矩阵或四元数计算采用较低迭代频率的慢速回路理论。上述理论研究奠定了姿态更新算法的经典理论基础。
2