并联机器人(机械手)
绳索驱动并联机器人的静力学优化与机构设计

cables are unable to push the moving platform,which brings with a huge challenge of
the motion control for CDPMs.Thus we begin our research with the special problems
(4)在8根绳索驱动的6自由度并联机器人上进行了MATLAB仿真实验, 从而验证了理论结果和算法性能。此外,在ADAMS中搭建了6自由度绳索驱 动并联机器人平台,综合力可行、拉力分布和机械设计三部分内容,实现了并 联机器人的运动控制仿真。
关键词:绳索驱动并联机器人工作空间力封闭力可行机构优化绳索拉力 分布ADAMS
中国科学技术大学学位论文授权使用声明
作为申请学位的条件之一,学位论文著作权拥有者授权中国科学技术大学 拥有学位论文的部分使用权,即:学校有权按有关规定向国家有关部门或机构 送交论文的复印件和电子版,允许论文被查阅和借阅,可以将学位论文编入《中 国学位论文全文数据库》等有关数据库进行检索,可以采用影印、缩印或扫描 等复制手段保存、汇编学位论文。本人提交的电子文档的内容和纸质论文的内 容相一致。
WFW is proposed.
(3)For cable-driven parallel manipulators(CDPMs)with redundant cables,there
problem,a are an infinite number of tension distributions.To resolve this
of CDMPs.In this dissertafion.our research includes wrench.closure workspace
并联机构

并联机器人机构构型创新设计研究汪劲松.关立文.王立平.李铁民.提出一种并联机器人机构构型创新设计新方法——桁架推演法,该方法包括三个主要步骤:根据具体设计需求选择自由度为0的并联机构桁架,并选择适当的推演规则;在一定的约束条件下对桁架进行推演;对推演结果分析、判断和决策,得到新并联机构构型。
最后举例说明了桁架和推演规则等对并联机器人机构构型创新设计具有决定性影响的关键技术问题。
MATLAB 在并联机器人机构仿真中的应用运用Matlab语言给出了平面3RRR并联机构三维仿真实体模型的简单画法及三维实体模型的运动仿真,同时又运用微分法和影响系数两种算法仿真了机构的速度及加速度曲线,最后从仿真图中直接分析了机构的奇异位型点,并说明了文献[7]中运用新的性能分析方法所得出的机构尺寸变化对机构性能影响的结论的实用性。
这充分展现了Matlab的科学计算可视化技术在机器人领域的应用及发展前景。
一种6-6UHU并联机器人的设计和实验研究研制了一种新型结构的大工作空间6 6UHU并联机器人。
通过对虎克铰摆角极限对机器人工作空间的影响研究,在机构设计上解决了杆间干涉和下关节极限问题,简化了干涉检测算法,降低了运动控制算法的复杂性,并且增大了工作空间。
研制出基于DSP的多轴控制器PMAC卡的交流伺服电机控制系统和实验系统,并进行了实验。
给出了不同姿态下该机器人的工作空间分析。
仿真数据和实验结果表明,所研制的新型6 6UHU 并联机器人,结构精巧,工作空间大,动平台的倾斜角达到4 5°;同时具有高刚度、高精度、操作性能好等特点。
干涉防护系统能保证机器人在大工作空间机动运行情况3转动1移动并联机器人机构的结构综合房海蓉.方跃法.胡明.利用螺旋和反螺旋之间的互易关系,分析了给定机构运动自由度与支链约束之间的关系,提出了基于螺旋理论的4自由度并联机器人机构结构综合的一种方法.据此构造了3转动1移动4自由度并联机器人机构的可能支链类型,列举了多种新型对称机构和非对称机构.所提方法对其它少自由度并联机器人机构的结构综合具有普遍意义.并联机构激光加工系统创新设计孙会来.林树忠.李洪来.高铁红.提出了一种新型的两自由度并联平动机构 ,并将其成功的应用到YAG激光加工平台当中。
基于PLC的高速并联机械手控制技术

锁 紧套 的 方式连 接 ; 主 动臂 与减 速 器 输 出轴 同样 采用 锁 紧套 的方 式连 接 , 这样 可 以避 免 采 用键 连 接 时 的反 向误差 ; 机 械手 的 3 个 主从 动臂 构成 了机 械闭环 结构 , 可进一 步减 小机 械 手 的定 位 误 差 ; 从 动臂 采 用 碳纤 维 材料 , 质量 和惯性 非 常小 ; 加减 速能力 与 串联机 械手相 比具有 不 可 比拟 的优 势 。基 于上 述 优点 D e l t a机 械手
作 者 筒 介 ;胡 高 峰 ( 1 9 8 7 一 ) ,男 ,河 北 唐 山 人 ,在 读 硕 士研 究 生 ,研 究 方 向 :并 联 机 器 人 控 制 技 术 。
・
1 4 6 ・
机 械 工 程 与 自 动 化
2 0 1 3年 第 3 期
监视 。
止一 加速一 匀速一 减 速一 静 止 , 从 而使 动 平 台 的速度
带 有虎 克铰链 , 故机 械 手 还 能够 实 现 被 抓 物体 垂 直 于
静 平 台的单 自由度 转动 。 本 文 以 De l t a高速 并 联 机 械 手 为控 制对 象 , 搭建 基于 P L C的并联 机械 手控制 系统 , 研究 机械 手 的轨迹
速并联 机 械手 当 中最 具 有 代 表性 的 。De l t a机 械 手 的
收 稿 日期 :2 0 1 2 — 1 I - 0 7 ;修 回 日期 :2 0 1 2 — 1 z 一 1 8
( 2 )运 动定 位模 块 : 控制 系统 运 动 定 位模 块 采 用 三菱 Mi t s u b i s h i QD 7 5 MH4多轴 位 置控 制 模块 , 通 过 主基 板 Q3 8 B 与 Mi t s u b i s h i Q0 2 H C P U 单 元通 讯。 定位模 块负 责伺 服 电机 的转矩 、 位 置和 速 度 的控 制 与
中国科学技术馆之科技与生活(5)
52
展厅位于三层西北侧,
包括“交通之便”展区和“机
械之巧”展区。
中国科学技术馆之
这期我们将要带着小读者去中国科技馆的
哪个展区参观呢?那就是“科技与生活”展厅。
小编的话:“科技与生活”主题
展厅位于中国科学技术馆三层,面积
约6400平方米,包括A、B、C、D四
个分展厅。
下面就让我们看看有趣的
“科技与生活”吧。
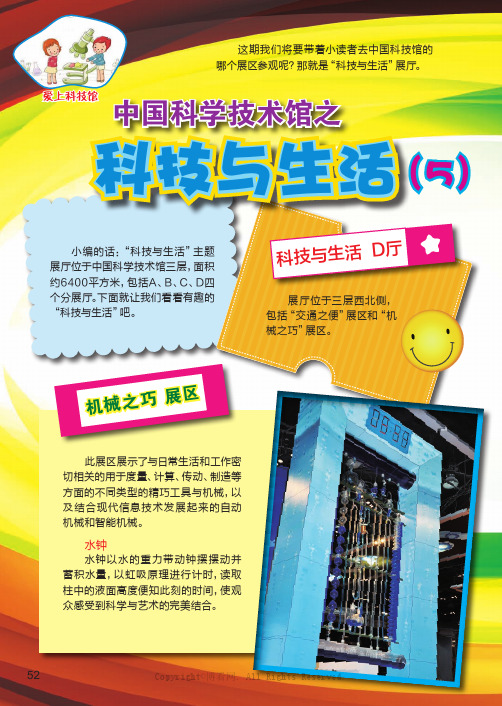
此展区展示了与日常生活和工作密
切相关的用于度量、计算、传动、制造等
方面的不同类型的精巧工具与机械,以
及结合现代信息技术发展起来的自动
机械和智能机械。
科技与生活(5)
水钟
水钟以水的重力带动钟摆摆动并
蓄积水量,以虹吸原理进行计时,读取
柱中的液面高度便知此刻的时间,使观
众感受到科学与艺术的完美结合。
爱上科技馆
机械之巧
展区
科技与生活D
厅
Copyright©博看网. All Rights Reserved.
53并联机械手
展示了新型并联机器人的高速
性和智能特性。
观众可以输入简单的
文字或图形,由并联机械手迅速抓放
拼图,拼成当初输入的文字或图形。
(本栏目合作单位:中国科学技术馆 图/文提供:陈明晖)“我”的生产线
由三台工业机器人和影视屏幕
组成一条趣味“生产线”,让观众感
受工业机器人的高超本领和现代工
业生产的过程。
Copyright©博看网. All Rights Reserved.。
机器人基础知识—零基础入门

《机器人基础》第5章串/并联机器人5.1串联机器人简介5.1.1串联机器人的结构组成5.1.2串联机器人的运动控制5.2并联机器人简介5.2.1并联机器人的结构组成5.2.2并联机器人的运动控制5.3经典应用案例5.3.1串联机器人应用案例5.3.2并联机器人应用案例5.1串联机器人简介(1P2)在智能制造蓬勃发展的同时工业机器人的发展越来越快速,各行各业对机器人机械学的发展也越来越重视,从大范围来分机器人机械学可分为串联机器人、并联机器人和串并联混合的混联机器人这三大类型。
串联机器人一般是由基座、腰关节、腰部、肩关节、大臂、小臂、腕关节、手腕以串联的形式连接而形成的开链式结构。
开链是指一种不含回路的运动链,也称为开式运动链。
如图5.1所示,由运动副和构件以串联的形式组成的开链称之为单个开式链,即单开链(single pended chain,SOC)。
一般而言串联机器人通常是由单开链组成的。
该类机器人结构简单,灵活性大,易控制、且具有很好的规避功能。
常被应用各种领域,如工业中的机械手夹具、航天领域中导航陀螺仪和生活中的雷达天线等。
如果多个单开链互相结合在一起,就形成了树状开链,如图5.2所示。
除了线性方面,在平面和空间上,单开链有平面开链和空间开链之分。
平面单开链是指所有运动副都在同一个平面内运动,平面串联机器人就是平面单开链组成的串联机器人;而空间单开链式指运动副在不同的平面内运动,则空间串联机器人就是由空间单开链组成的串联机器人。
(1P15)近年来研究人员对机器人的各个部件以及各个部件的性能进行了特殊研究,改进了机器人各部件的结构使其获得更好的运动性能,这些研究对推广串联机器人的广泛运用有重要的意义。
图 5.1单开链图 5.2树状开链除了上述串联机器人的优点,也有明显的不足,如各关节均为悬臂结构,这就意味着在相同的自重条件或者体积下与并联机器人相比,串联机器人的承重能力更低,刚度也下降,这就使得串联机器人的各个关节误差的累计与放大,在误差大的同时它的精度就会减低。
并联机构

Word教程: /word/
Excel教程:www.1ppt.c om/excel/
资料下载:www. 1ppt.co m/zilia o/
PPT课件下载:www.1p pt.co m/ kejian/
范文下载:www. 1ppt.co m/fan wen/
试卷下载:www.1ppt.c om/shiti /
并联机构的应用实例
一、运动模拟器
并联机构最早就是作为飞行模拟器所应用。 它能完成90%的训练任务,而所需费用仅 为实际飞行的2.5%~10%,由于效益明显, 在飞行模拟器中得到广泛应用。图为 NASA研制的波音747飞行模拟器。
二、并联机构的机床
三、并联机构的微操作机器人
其他应用:军事领域中的潜艇、坦克驾驶运动模拟器,下一代战斗机的矢 量喷管、潜艇及空间飞行器的对接装置、姿态控制器等;生物医学工程中 的细胞操作机器人、可实现细胞的注射和分割;微外科手术机器人;大型 射电天文望远镜的姿态调整装置;混联装备等,如SMT公司的Tricept混联 机械手模块是基于并联机构单元的模块化设计的成功典范。
并联机构
作者:孙嘉徽
湖南工业大学机械工程学院
并联机构的简介 研究意义及研究过程 结构及其工作原理 并联机构的应用实例
并联机构(Parallel Mechanism,简称PM), 可以定义为动平台和定平台通过至少两个独立的运动链相连接,机构
具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。 串联机构
是指若干个单自由度的基本机构顺序联接,每一个前置机构的输出运 动是后置机构的输入,若联接点设在前置机构中作简单运动的构件上,即形 成所谓的串联式组合。
其实并联机构很早就出现了,大概经过的四个阶段。 球面并联机构;
机器人的定义

1.机器人的定义:1)美国机器人工业协会给出的定义:机器人是一种用于移动各种材料,零件,工具或专用装置,通过可编程序动作来执行各种任务并具有编程能力的多功能机械手。
2)日本工业机器人协会给出的定义:一种带有存储器件和末端操作器的通用机械,它能够通过自动化的动作替代人类劳动。
3)我国科学家对机器人的定义:机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力,规划能力,动作能力和协同能力,是一种具有高度灵活性的自动化机器。
2.PID工作原理,作用:PID控制是自动化中广泛使用的一种反馈控制,其控制器由比例单元,积分单元和微分单元组成,利用信号的偏差值,偏差的积分值,偏差的微分值的组合来构成操作量,操作量中包含了偏差信号的现在,过去,未来三方面的信息,所以是一种经典控制方式。
1)P-比例控制:作用:提高快捷性,灵敏度;不足:系统不稳定,易振荡2)I-积分控制:作用:消除误差,提高稳态精度;不足:输出缓慢,系统稳定性下降;3)微分控制:提高抗扰能力;不足:不稳定。
3.简述滚珠丝杠工作原理:在丝杆和螺母上加工有弧行螺旋槽,当它们套装在一起时便形成螺旋滚道,并在滚道内装满滚珠。
而滚珠则沿滚道滚动,并经回珠管作周而复始的循环运动。
回珠管两端还起挡珠的作用,以防滚珠沿滚道掉出。
4. 机器人工作原理:工业机器人系统组成1)机械系统作用相当于人的身体(骨骼,手,臂,腿等);2)驱动系统相当于人的肌肉;3)控制系统相当于人的大脑;4)感知系统相当于人的五官。
机器人系统实际上是一个典型的机电一体化系统,其工作原理为:控制系统发出动作指令,控制驱动器动作,驱动器带动机械系统运动,使末端操作器到达空间某一位置和实现某一姿态,实施一定的作业任务。
末端操作器在空间的实时位姿由感知系统反馈给控制系统,控制系统把实际位姿与目标位姿相比较,发出下一个动作指令,如此循环,直到完成作业任务为止。
1机械人技术集中了机械工程、电子技术、计算机技术、自动控制理论及人工智能等学科的最新研究成果。
工业机器人的分类—按机械结构分类
2.并联机器人
并联机器人可以定义为动平 台和定平台通过至少两个独立的运 动链相连接,机构具有两个或两个 以上自由度,且以并联方式驱动的 一种闭环机器人。
2.并联机器人
按照并联机构的自由度分类: 两自由度并联机构
三自由度并联机构
四自由度并联机构
五自由度并联机构
六自由度并联机构
按照并联机构的自由度分类——两自由度并联机构
按照并联机构的自由度分类——四自由度并联机构
四自由度并联机构大多不是完全并联 机构,如2-UPS-1-RRRR机构,运动 平台通过3个支链与定平台相连,有2 个运动链是相同的,各具有1个虎克铰 U、1个移动副P,其中P和其中一个的 R是驱动副,因此这种机构不是完全 并联机构。
按照并联机构的自由度分类——五自由度并联机构
以下是按照设备的结构形式和用途对 机器人进行分类。
机械结构 (坐标形式)
用途
根据结构形式分类
串联机器人 并联机器人
1.串联机器人
根据结构形式分类
串联机器人是开式运动链,它是由一系列 连杆通过转动关节或移动关节串联而成。 关节由驱动器驱动,关节的相对运动导致 连杆的运动,使手爪到达一定的位姿。
1.串联机器人
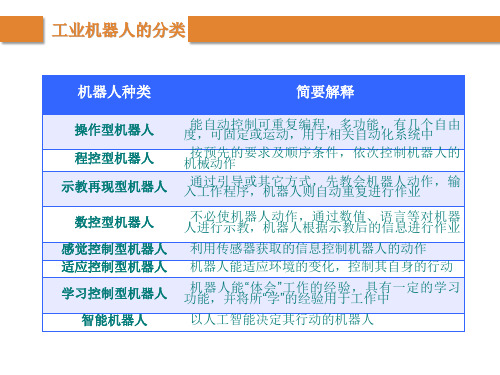
工业机器人的分类
机器人种类
简要解释
操作型机器人 程控型机器人 示教再现型机器人
能自动控制可重复编程,多功能,有几个自由 度,可固定或运动,用于相关自动化系统中 按预先的要求及顺序条件,依次控制机器人的 机械动作 通过引导或其它方式,先教会机器人动作,输 入工作程序,机器人则自动重复进行作业
数控型机器人 感觉控制型机器人 适应控制型机器人 学习控制型机器人
1.串联机器人——⑷多关节机器人
多关节型机器人由多个旋转和摆动机构组合而成。 纯球状