循迹机器人沿着黑色轨迹线转弯的原理
寻迹原理和避障原理
寻迹原理和避障原理一、寻迹原理:寻迹原理是指机器人通过识别地面上的路径,按照路径进行导航。
它通常通过以下几个步骤实现:1.传感器采集:机器人使用地面传感器来检测地面上的路径。
传感器可以是红外线传感器、摄像头或者其他类型的传感器。
这些传感器能够探测地面上的黑线或其他特定的标记。
2.信号处理:机器人将传感器采集到的信号传输到处理器进行处理。
处理器将信号转化为数字信号,并进行滤波和放大等处理,以提供可靠的数据给导航系统。
3.路径识别:机器人在信号处理的基础上,通过算法识别地面上的路径。
算法可以是简单的阈值判断,也可以是更复杂的模式识别算法。
通过识别路径,机器人能够确定应该按照哪个方向移动。
4.移动控制:机器人根据识别的路径信息,通过电机或其他方式控制轮胎转动,以实现对机器人的移动。
控制可以是简单的前进和后退,也可以是更复杂的左右转动等。
寻迹原理适用于需要沿着特定路径移动的机器人任务,例如在生产线上执行自动化操作或者在室内进行地面清洁等。
通过寻迹原理,机器人能够精确地按照所设定的路径进行导航,提高了导航的准确性和效率。
二、避障原理:避障原理是指机器人通过识别障碍物,避开障碍物的原理。
它通常通过以下几个步骤实现:1.传感器采集:机器人使用传感器探测周围环境中的障碍物。
传感器可以是超声波传感器、激光雷达或摄像头等。
这些传感器能够测量周围物体的距离和位置等信息。
2.信号处理:机器人将传感器采集到的信号传输到处理器进行处理。
处理器将信号转化为数字信号,并进行滤波和放大等处理,以提供可靠的数据给导航系统。
3.障碍物识别:机器人通过算法识别传感器采集到的信息,确定周围是否存在障碍物。
算法可以是简单的距离判断,也可以是更复杂的物体识别算法。
通过识别障碍物,机器人能够确定应该如何避开障碍物。
4.避免策略:机器人根据识别到的障碍物信息,选择合适的避免策略。
避免策略可以是简单的停止或后退等,也可以是更复杂的绕过障碍物的路径规划。
ev3循线小车原理
ev3循线小车原理EV3循线小车原理EV3循线小车是一种基于LEGO Mindstorms EV3套装的机器人,它可以根据预先设定的程序,在地面上自动跟踪黑线行驶。
它的原理是通过使用EV3主控模块和光线传感器来实现。
EV3循线小车的核心组件是EV3主控模块,它是机器人的大脑。
EV3主控模块内置了Linux操作系统,可以控制机器人的各个部分进行协调工作。
它有多个端口,可以连接各种传感器和执行器。
在EV3循线小车中,我们使用光线传感器来检测地面上的黑线。
光线传感器是EV3循线小车的感知器官,它可以测量周围环境的光线强度。
在循线小车中,光线传感器被放置在车体的底部,与地面保持一定的距离。
当小车行驶在黑线上时,光线传感器会检测到地面上的黑色,并产生一个信号。
根据信号的强度,我们可以判断小车是否偏离了黑线。
EV3主控模块通过编程控制小车的行为。
在循线小车中,我们可以使用LEGO Mindstorms EV3软件来编写程序。
首先,我们需要将光线传感器与EV3主控模块连接,并在程序中指定传感器的端口。
然后,我们需要设置传感器的模式为反射模式,这样传感器就可以测量地面上黑线的反射光强度。
在程序中,我们可以使用条件语句来判断光线传感器测量到的光强是否小于一个阈值。
如果光强小于阈值,说明小车偏离了黑线,我们就可以通过控制执行器使小车调整方向。
例如,我们可以通过转动电机来改变小车的行驶方向,使它重新回到黑线上。
如果光强大于阈值,说明小车仍在黑线上,我们可以继续沿着黑线行驶。
除了基本的循线功能,我们还可以对EV3循线小车进行扩展。
例如,我们可以添加陀螺仪传感器来测量小车的倾斜角度,从而实现更精确的控制。
我们还可以添加颜色传感器,使小车能够识别不同颜色的线路。
通过不同颜色的线路,我们可以给小车设置不同的指令,实现更多样化的行为。
总结起来,EV3循线小车是一种基于LEGO Mindstorms EV3套装的机器人,它通过使用EV3主控模块和光线传感器来实现循线功能。
机器人走8字
按照走轨迹-沿黑线走的机器人最基本的算法,可以用1个光感,2个光感,3个光感,4个光感来走。
其中,1个光感的原理如下
2个光感的原理如下
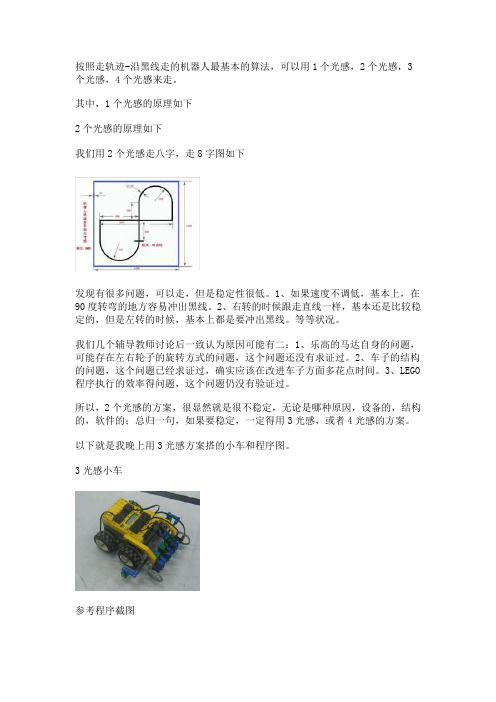
我们用2个光感走八字,走8字图如下
发现有很多问题,可以走,但是稳定性很低。
1、如果速度不调低,基本上,在90度转弯的地方容易冲出黑线。
2、右转的时候跟走直线一样,基本还是比较稳定的,但是左转的时候,基本上都是要冲出黑线。
等等状况。
我们几个辅导教师讨论后一致认为原因可能有二:1、乐高的马达自身的问题,可能存在左右轮子的旋转方式的问题,这个问题还没有求证过。
2、车子的结构的问题,这个问题已经求证过,确实应该在改进车子方面多花点时间。
3、LEGO 程序执行的效率得问题,这个问题仍没有验证过。
所以,2个光感的方案,很显然就是很不稳定,无论是哪种原因,设备的,结构的,软件的;总归一句,如果要稳定,一定得用3光感,或者4光感的方案。
以下就是我晚上用3光感方案搭的小车和程序图。
3光感小车
参考程序截图
主程序截图
子程序截图
以上为完整的3光感程序,2端口光感位置在中间。
光感值,要随环境的变化来调整。
之前我也试过用容器,但是没办法实现,之后再用容器来实现,这样比较方便场地调试使用,不过直接用数字来调整也是相当的稳定。
我试过十来次,基本上都完整的完成了任务。
这个3光感的基本思路如下:有空来写
(………………………………)
LEGO乐高机器人走八字8字的视频已经录完,还有走八字.vi 程序都有,需要的朋友联系我:QQ7664553。
机器人循迹原理及程序实现(基础篇下)
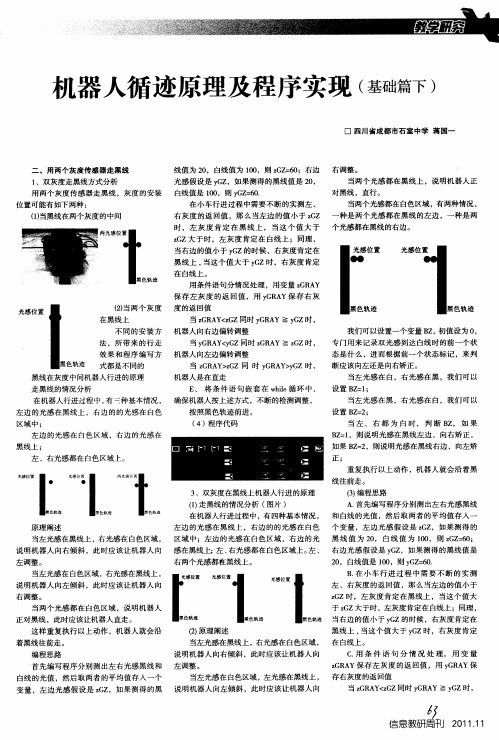
不 同 的安装 方 机器人 向右边偏转调整
效 果 和 程 序 编 写 方 机器人 向左边偏转调整 ■■●■■■■ 式都 是 不 同 的 当 z R Y z Z 同 时 y R Y y Z时 , G A >G G A >G
黑线在灰度 中间机器人行进 的原理 走黑线 的情况分析 左 边的光感 在黑线 上 ,右边 的的光感在 白色
当右边 的值小于 y Z的时候 ,右灰度 肯定在 G 黑线 上 , 当这个 值大 于 y Z时 ,右灰度 肯定 G
在 白线上 。 C 用 条 件 语 句 分 情 况 处 理 , 用 变 量 .
这样重 复执行 以上 动作 ,机器 人就会沿 着黑线往前走 。 编程思路 首先 编写程序分 别测 出左 右光感黑线 和 白线 的光值 ,然后 取两者 的平 均值存人 一个 变量 ,左边光 感假设 是 z Z G ,如果 测得 的黑
说 明机器人 向右倾斜 ,此时应该让 机器人 向 感 在黑线上; 、 左 右光感都在 白色区域上 。 、 右边 光感假设 是 y Z 左 G ,如果测得 的黑线值 是
左调整 。
右两个光感都在黑线上 。
2 ,白线值是 10 0 0 ,则 y Z 6 . G =0 B 在 小车 行 进 过 程 中需 要 不 断 的实 测 .
正:
重复执行 以上动作 ,机 器人就会 沿着黑
线往前走 。
3 、双灰度在黑线上机器人行进 的原理
() 黑 线 的 情 况 分 析 ( 1走 图片 )
原 理 阐述
f 编程思路 3 ) A 首先 编写程序分别测 出左 右光感黑线 .
在 机 器 人 行 进 过 程 中 , 四种 基 本 情 况 , 和 白线的光值 ,然 后取两者 的平均值 存入一 有
循迹 原理 红外线
循迹原理红外线
循迹技术是机器人领域的一项常用技术,它可以让机器人通过检测地面上的黑线实现沿着指定路径移动。
循迹的原理是利用车载传感器,检测地面上的黑线,然后根据检测到的黑线进行相应的控制。
循迹技术的传感器通常采用红外线传感器,其原理是利用红外线传感器向地面发射红外线,当红外线遇到地面上的黑线时,部分红外线会被黑线吸收,而其余的红外线会被反射回传感器。
通过检测反射回来的红外线强度,循迹系统可以判断当前车辆在地面上的位置和朝向。
循迹车的传感器安装在机器人车底下,通常由一个或多个光电(红外)发射机和接受机组成。
当光电发射机发射红外线时,一部分的红外线被黑色基底吸收,另一部分被反射回来,被光电接收机探测。
这时,光电接收机输出的信号,经过放大和强度限制后,被微处理器的多路A/D变换输入端检测。
如果机器人离线的距离在一个阈值以内,A/D输入端将会输出一个较高的电平值,否则,将输出一个较低的电平值。
循迹技术是实现自动导航的重要手段,其应用范围广泛,如农业中的作物喷雾机、仓库中的物料运输车、家庭中的地面清洁机器人、地铁等公共交通工具等。
在工业自动化中,循迹技术可以用于流水线物流,工件装配以及机器人装载与卸货操作。
在军事领域,循迹技术不仅可以用于地面作战机器人和无人驾驶车辆,还可以应用于导航、神经网络控制、自主机器人的探测和认知以及特种作战机器人
的应用。
总之,循迹技术是机器人领域的重要发展方向之一,将在未来的工业、家居、农业、军事等领域得到广泛应用。
循迹小车的原理
循迹小车的原理循迹小车是一种基于传感器的智能机器人,它能够自动地在预设的路径上行驶,并根据环境的变化进行自我调整。
循迹小车的原理主要涉及到传感器、控制电路和电机三个方面。
首先,循迹小车依靠传感器来感知环境的变化,其中最常用的传感器是红外线传感器。
红外线传感器主要由发射器和接收器组成,其中发射器发射红外线信号,接收器接收反射回来的红外线信号。
当循迹小车在行驶过程中,传感器能够感知到路径上的黑线或者其他颜色差异,然后将这些信号转化为电信号,传递给控制电路。
其次,控制电路是循迹小车的核心部分,它根据传感器接收到的信号,进行相应的逻辑判断和处理,来控制电机的运动。
控制电路一般由集成电路组成,可以通过编程或者硬连线的方式来实现逻辑控制。
当传感器感知到黑线时,控制电路会判断是否需要转弯,根据不同的判断结果,向电机提供不同的控制信号,控制电机的转向和速度。
这样循迹小车就可以根据黑线的走向,做出适当的转弯和速度调整,从而沿着预设的路径行驶。
第三,电机是循迹小车的动力源,它负责驱动车轮的转动。
一般来说,循迹小车采用两个驱动轮,每个驱动轮都有一个电机来驱动。
电机接收控制电路输出的控制信号,根据信号的不同进行相应的运转,从而驱动车轮转动。
当循迹小车需要转弯时,控制电路会向电机提供不同的信号,使得其中一个电机停止或者反向运转,从而实现转弯动作。
通过控制电路对电机的控制,循迹小车可以根据需要改变行进速度和转弯半径,以实现在预设路径上的准确行驶。
综上所述,循迹小车的原理主要包括传感器的感知、控制电路的处理和电机的运转。
通过传感器感知路径上的黑线或其他有色标记,控制电路进行逻辑判断和处理,再通过控制信号控制电机的运动,循迹小车就可以自动地在预设的路径上行驶。
循迹小车的原理简单实用,可以通过调整控制电路和传感器的设置,实现不同场景下的行驶需求,因此在教育、娱乐和实验等领域都有广泛的应用。
红外循迹模块工作原理

红外循迹模块工作原理红外循迹模块是一种在智能设备、机器人等领域广泛应用的重要部件,它的工作原理充满了科学性与趣味性。
红外循迹模块主要基于红外线的反射特性来工作。
大家都知道,红外线是一种不可见光,它的波长介于微波与可见光之间。
在红外循迹模块中,有一个红外发射管和一个红外接收管。
红外发射管负责发射红外线,就像一个小小的信号发射器,不断地向外界发送红外线信号。
这个发射的过程呢,是通过给发射管施加一定的电压,使得它内部的电子发生跃迁,从而产生红外线并向外辐射。
当红外线照射到不同颜色的物体表面时,会发生不同的反射情况。
比如说,白色的物体表面对红外线的反射率比较高,而黑色的物体表面对红外线的反射率就比较低。
这是因为白色物体能够反射更多的光线,而黑色物体更多的是吸收光线。
当红外循迹模块在一个有着特定颜色轨迹的表面上移动时,比如说在一个白色背景下的黑色轨迹上,红外发射管发出的红外线照射到白色区域时,大量的红外线被反射回来,被红外接收管接收到。
而当红外线照射到黑色轨迹上时,由于黑色吸收了大部分红外线,反射回来被接收管接收到的红外线就很少。
红外接收管就像是一个敏锐的探测器。
它接收到反射回来的红外线后,会根据接收到的红外线的强度产生相应的电信号。
如果接收到的红外线强度比较高,就会产生一个比较强的电信号;如果接收到的红外线强度比较低,产生的电信号就比较弱。
这个电信号会被传输到后续的电路中进行处理。
在后续的电路中,通常会有比较器等电子元件。
比较器会将接收到的电信号与一个预设的阈值进行比较。
这个阈值是根据实际情况设定的,比如根据白色表面反射回来的红外线所对应的电信号强度来设定。
如果接收到的电信号大于这个阈值,就可以判断当前红外循迹模块位于白色区域;如果接收到的电信号小于这个阈值,那就意味着模块位于黑色轨迹上。
通过不断地进行这样的检测和判断,就可以实现对轨迹的跟踪。
我们可以想象一下机器人沿着黑色轨迹行走的场景。
机器人底部安装了红外循迹模块,当它在白色地面上移动时,红外循迹模块不断检测,一旦接近黑色轨迹,接收管接收到的红外线强度变化,产生的电信号变化被比较器识别,机器人就能知道自己快要偏离轨迹了,从而调整自己的行走方向,始终沿着黑色轨迹前行。
机器人自动循迹原理

机器人自动循迹原理你知道机器人为啥能在复杂的环境里,沿着预设的路线稳稳当当地走吗?这背后的自动循迹原理,可有意思啦!咱先聊聊传感器,这可是机器人的 “眼睛” 和 “触角”。
就好比你走在一条陌生的小路上,得靠眼睛瞅着路边的标识,用手摸摸周围的环境,才能不跑偏。
机器人也一样,它身上装着各种各样的传感器,像红外传感器、摄像头之类的。
红外传感器可机灵啦,能发射红外线,再接收反射回来的光线。
要是碰到白色的地面,光线反射得多,信号就强;遇到黑色的胶带或者标记,光线吸收得多,反射回来的少,信号就弱。
这一强一弱的信号变化,就像给机器人偷偷塞了张小纸条,告诉它:“嘿,路在这边,别走错咯!” 摄像头呢,就更牛了,它咔嚓咔嚓地拍照,把机器人眼前的景象全记录下来,通过图像识别技术,分辨出哪是该走的路线,哪是障碍物,跟咱人用眼睛找路差不多一个理儿。
再讲讲算法,这算法就是机器人的 “大脑”。
有了传感器收集来的信息,没个聪明的 “大脑” 处理可不行。
简单来说,算法得把那些乱糟糟的信号和图像数据,整理得明明白白。
比如说,根据红外传感器反馈的光线强弱,判断机器人是不是快要偏离轨道了,如果偏了,得赶紧调整方向。
这就好比你骑自行车,感觉车把歪了,身体自然而然地就会倾斜、转动车把,把车重新扶正。
机器人也是,通过算法计算出该往哪边转、转多少度,才能回到正轨。
要是遇上复杂的路况,有弯道、岔路啥的,算法就更得加把劲,像个经验丰富的导航员,指挥着机器人灵活转弯、避开错误路线。
而且啊,动力系统也不能小瞧,它是机器人的 “腿” 和 “脚”。
电机嗡嗡转起来,轮子才能跑。
当算法判断出要调整方向,动力系统就得马上响应。
要是该往左拐,左边轮子减速,右边轮子稍微加速,机器人就顺顺当当拐过去了,跟咱们走路的时候,想转弯得挪动脚步、调整重心一样自然。
要是动力系统反应慢半拍,机器人就可能一头撞在障碍物上,或者偏离路线老远,那可就乱套了。
机器人自动循迹这事儿,就像一场配合默契的团体赛。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
循迹机器人沿着黑色轨迹线转弯的原理
循迹机器人是一种基于光电传感技术的智能机器人,能够沿着预设的黑色轨迹线行走。
那么它是如何能够在黑色轨迹线上顺畅地转弯呢?
首先,循迹机器人需要通过光电传感器检测黑色轨迹线的位置和方向。
当机器人行进到转弯处时,传感器会检测到黑色轨迹线的弯曲,从而触发机器人的转弯动作。
接下来,循迹机器人会通过控制电机的速度和方向,使其向左或向右转弯。
具体的转弯方式取决于机器人的设计和程序编写。
一般来说,循迹机器人会先降低内侧轮子的速度,然后加速外侧轮子,从而实现向内侧转弯的效果。
反之,如果要向外侧转弯,则会加速内侧轮子,降低外侧轮子的速度。
总的来说,循迹机器人沿着黑色轨迹线转弯的原理就是通过光电传感器检测轨迹线的位置和方向,并控制电机的速度和方向实现转弯动作。
这种技术已经被广泛应用于自动化生产线、智能家居、机器人比赛等领域,具有广阔的发展前景。
- 1 -。