无人机地面站软件设计与实现论文
基于GL Studio的无人机地面站天线控件设计与实现

李兴岷 ,陈怀 民 ,喻 戈 ,任 伟
706 ; 10 5 70 6 ) 10 5 (. 1西北工业 大学 无人机特种技术 国防重 点实验室 , 陕西 西安 2 中国兵器工业 第 2 3研究所 , . 0 陕西 西安
,
f .Nain lD fnek yL b rtr fU 1 t a ee s e a oaoy o AV p ca e h ooy Notw sen P ltc nclUnv ri , ’ n7 0 6 , hn ; o S e ilT c n lg , r etr oyeh ia ies y Xia 10 5 C ia h t
良好 的 可移植 性 , 而且还 可 以与 多种 软件 开发 平 台实现 很好 的 融合 。
关键 词 : 无人机 ; 面站 ; LSu i; 线控件 地 G tdo 天 中图分 类号 :P 9 . 文 献标 识码 : 文 章编 号 :0 0— 8 9 2 1 ) 9— 0 3— 3 T 3 19 A 10 8 2 ( 0 1 0 0 8 0
2.N . 0 sac nt ueo hn d a c n u t e , ’ n7 0 6 , hn ) o 2 3Ree rhI si t fC iaOrn n eId sr s Xia 1 0 5 C ia t i
Ab t a t I r e o i l me th ma — c n n e a to e f cl n th UAV’S d t i k t l n s r c : n o d rt mp e n u n ma hi e i t r cin p re ty a d wac aa l i y a d n me i t iiey, i d o n u tv l a k n fGCS’ n e n o o e tb s d o S a t n a c mp n n a e n GL t d o i o sr c e a d t e he d sg h o y S u i sc n tu td, n h n t e in t e r a d me h d a e ds u s d i e al Th o o n sn to l v ih ta p a t t n bu lo c n bes o h n t o r ic s e n d ti. e c mp ne t o ny ha e hg r ns l n ai , tas a mo t - o
无人机地面站的设计
高 新 技 术4科技资讯 SC I EN C E & TE C HN O LO G Y I NF O R MA T IO N无人机不仅在军事上得到了广泛的应用,而且在民用方面也得到了普遍重视。
随着计算机技术的发展,利用计算机的软、硬件,建立有关无人机的飞行、控制以及评估的仿真系统已经成为各国的共识。
而以往的飞行仿真中,得到的结果都是大量的数据或曲线,不具有直观性。
可视化技术的出现,使得仿真结果不再单调,甚至人们可以与计算机进行直接交互,对虚拟世界中具有形体的信息进行操作,实现了人、机合一。
“无人机地面站”正是运用计算机图形学知识结合现代计算机仿真技术实现的仿真系统,它为地面人员提供了一个形象的、虚拟的飞行界面,用于显示无人机的各种飞行参数,更加方便地实现地面人员对无人机的控制。
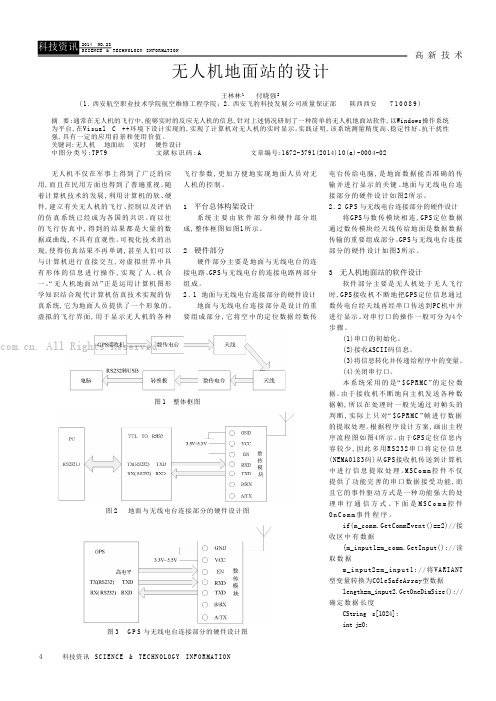
1 平台总体构架设计系统主要由软件部分和硬件部分组成,整体框图如图1所示。
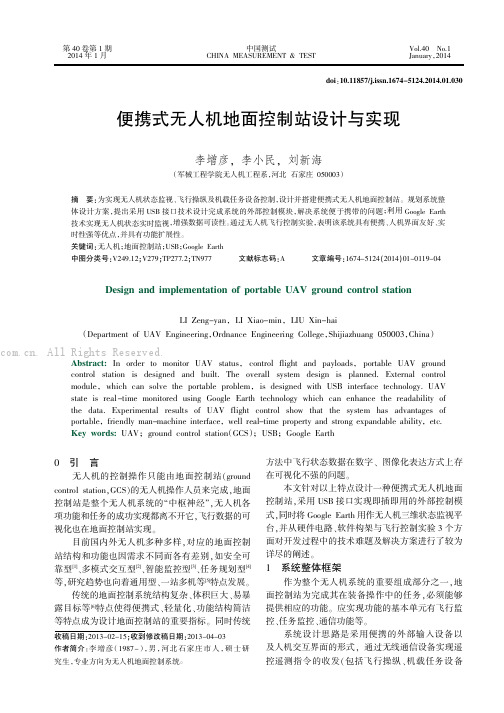
2 硬件部分硬件部分主要是地面与无线电台的连接电路、GPS与无线电台的连接电路两部分组成。
2.1地面与无线电台连接部分的硬件设计地面与无线电台连接部分是设计的重要组成部分,它将空中的定位数据经数传无人机地面站的设计王林林1 付晓强2(1.西安航空职业技术学院航空维修工程学院;2.西安飞豹科技发展公司质量保证部 陕西西安 710089)摘 要:通常在无人机的飞行中,能够实时的反应无人机的信息,针对上述情况研制了一种简单的无人机地面站软件,以Windows操作系统为平台,在Visual C ++环境下设计实现的,实现了计算机对无人机的实时显示。
实践证明,该系统测量精度高、稳定性好、抗干扰性强,具有一定的应用前景和使用价值。
关键词:无人机 地面站 实时 硬件设计中图分类号:TP79文献标识码:A 文章编号:1672-3791(2014)10(a)-0004-02电台传给电脑,是地面数据能否准确的传输并进行显示的关键。
地面与无线电台连接部分的硬件设计如图2所示。
无人机监控系统的设计与实现

无人机监控系统的设计与实现第一章:绪论随着无人机技术的不断发展,无人机已经成为了一个重要的领域。
无人机在军事、民用、科研等领域中的应用越来越广泛。
其中,无人机监控系统的研究也越来越重要。
本文旨在介绍无人机监控系统的设计与实现。
第二章:无人机监控系统的概述无人机监控系统主要包括无人机、载荷、地面站以及通讯链路等组成部分。
其中,无人机的选择非常重要,需要根据监控任务的不同选择不同的无人机。
载荷则是为了实现监控目标的视觉信息获取和处理。
地面站是整个监控系统的控制中心,需要实现对无人机和载荷的控制和数据处理。
通讯链路则是实现无人机和地面站之间的数据传输。
第三章:无人机的选择无人机的选择需要考虑多方面因素,如任务需求、飞行性能、载荷能力、续航能力等。
监控系统的任务需求决定了无人机需要搭载哪些传感器和通讯设备。
飞行性能和载荷能力则直接影响无人机的飞行稳定性和视觉信息采集质量。
续航能力是无人机能否长时间执行任务的重要因素。
第四章:载荷的选择无人机监控系统的载荷通常包括传感器和通讯设备。
传感器是无人机实现对监控目标视觉信息获取的核心设备,包括高清相机、红外传感器、激光雷达等。
通讯设备则是实现无人机和地面站之间的数据传输的关键设备,常用的通信方式包括无线电和卫星通讯等。
第五章:地面站的设计地面站是无人机监控系统的控制中心,需要实现对无人机和载荷的控制和数据处理。
地面站一般包括图传调制器、接收机、解调器、显示器等模块。
其中,图传调制器负责将载荷传回的视频信号进行编码和压缩,并通过无线电或卫星通讯将数据传输回地面站。
接收机则负责接收无人机的信号,解调器则将接收到的数据进行解码和解压缩,显示器则显示监控目标的视频信息。
第六章:通讯链路的设计通讯链路是无人机和地面站之间的数据传输设备。
通讯链路的选择需要考虑通讯距离、传输速率、通讯稳定性等因素。
常用的通讯方式包括无线电和卫星通讯等。
通过合理的通讯链路设计,可以保证无人机和地面站之间的数据传输稳定、及时、可靠。
无人机地面站通信系统的设计与应用

无人机地面站通信系统的设计与应用随着科技逐步发展,无人机作为一种比较新颖的空中机器人,正越来越多地被人们所重视和运用。
而无人机的使用不仅仅是在军事领域,它们在航拍、检测、灾害监测、农业等方面也具有很大的应用潜力。
无人机的控制和管理是一个比较关键的问题,而无人机地面站的通信系统设计和应用则是解决该问题的重要一步。
一、无人机地面站通信系统的概念无人机地面站是无人机飞行过程中的重要设备之一,主要负责对无人机进行控制、管理、安全保障和数据处理等。
而无人机地面站通信系统则是指无人机和地面站之间的通信控制设备,整个系统由控制台、发射器与接收器、地面通信设备构成。
二、无人机地面站通信系统设计的要点1、通信距离和通信质量。
无人机地面站通信系统的设计首先要考虑的是通信距离和通信质量,通信质量高的前提下,能够尽可能地提高无人机与地面站之间的通信距离,以满足不同外界环境下的应用需求。
2、无人机地面站通信频率。
无人机地面站通信频率的选择直接影响到通信质量,因此需要根据实际需求进行选择。
同时,针对不同应用领域,还需要考虑相应的通信协议和技术方案,以确保通信质量和数据安全性。
3、无人机地面站通信设备功能。
无人机地面站通信设备在设计的过程中,还需要考虑其它功能,如信号强度、时延、秘钥安全性等,以满足复杂的应用需求。
同时,无人机地面站通信设备的稳定性和可靠性也是设计的重点之一,这样才能确保无人机的飞行安全。
三、无人机地面站通信系统的应用1、航空拍摄。
在航空拍摄领域,无人机地面站的通信系统扮演着至关重要的作用。
通过无人机地面站的通信,可以控制无人机的飞行,调整摄像机的角度和位置,直接将拍摄到的画面通过通信传输到后台数据中心,从而为拍摄工作提供极大的便利。
2、农业领域。
在农业领域,无人机地面站通信系统的应用越来越广泛。
农业生产过程中,使用无人机进行观测可以实现快速更新、连续观测种植区域的状态和成长趋势,从而加强预测和保障农作物的质量和数量。
基于Qt的无人机地面站软件系统的设计
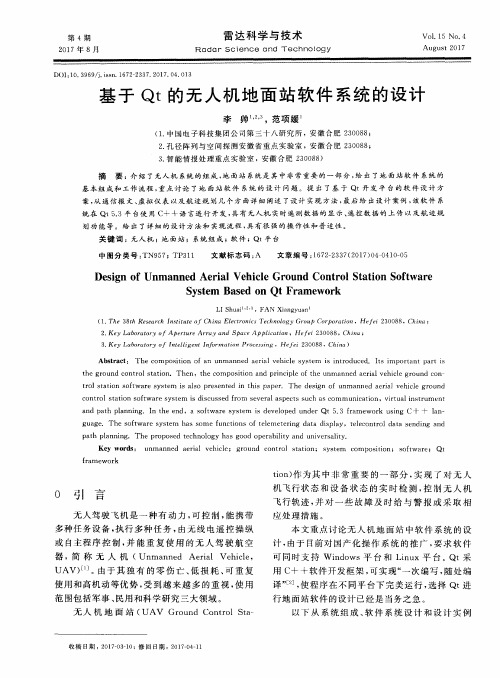
图 2 无 人 机 系 统 数 据 流
的放 大 、 缩小 、 漫 游等 功能 ;
4 1 2
雷 达 科 学 与 技 术
第1 5 卷第 4 期
7 )航点 注入 模 块 : 实 现航 点 的设 置 和 卜传 注
入, 旧时 支持 对话 框 手1 输入及删除、 地 鼠 标 标 绘设 置 及删 除 。
QI ma g e的方式 绘 制在 QWi d g e t I . 埘 Ql ma g e 旋
转 和 指 针 化 的 绘 实 现 横 滚 和 俯 仰 的变 化 。
设 计 流 I 刳 图 l昕 乐 。
0 X E B 9 A作 为头 信 息 . 接 收端只将 以 0 XE B 9 A 丌
2 0 1 7 年第 4 期
李帅 : 基 于 Qt 的无 人机 地 面站软 件 系统 的设计
4 l l
三个方 面展 开 阐述 , 给 出基 于 Qt 开发 平 台的 软件 设 计方 案 。
1 . 2 地 面 站 系统 组 成
地 面站系统 包括 硬件和 软件两 个部 分 , 硬 件
1 系统 组 成
主要 包括 地 面站 的 机 房 、 路 由器 、 电腑 机 柜、 显 控
席位 台 等 , 本 文重 点 讨 论地 面站 软件 系统 的设 计 。 地面 站软 件系 统 主 要 是 对 无 人机 的位 置 以及 状态 信息 进 行 实 时 显示 . 同 时 可以 对 无 人 机 的 工 作模 式 及参数 进行 控 制 , 对 飞行 轨 迹 进 行 规 划 . 保 证无 人机 的安 全 飞行 和 飞行 任 务 的有效 完成 。 为了提高地面站软件 系统的鲁棒性 . 软件 系
便携式无人机地面控制站设计与实现
0引言
无 人 机 的 控 制 操 作 只 能 由 地 面 控 制 站 渊ground control station袁GCS冤的无人机操作人员来完成袁地面 控制站是整个无人机系统的野中枢神经冶袁无人机各 项功能和任务的成功实现都离不开它袁飞行数据的可 视化也在地面控制站实现遥
目前国内外无人机多种多样袁对应的地面控制 站结构和功能也因需求不同而各有差别袁如安全可 靠型[1]尧多模式交互型[2]尧智能监控型[3]尧任务规划型[4] 等袁研究趋势也向着通用型尧一站多机等[5]特点发展遥
LI Zeng-yan,LI Xiao-min,LIU Xin-hai (Department of UAV Engineering,Ordnance Engineering College,Shijiazhuang 050003,China)
. All Rights Reserved.
第 40 卷第 1 期 2014 年 1 月
中国测试 CHINA MEASUREMENT & TEST
Hale Waihona Puke Vol.40 No.1 January,2014
doi院10.11857/j.issn.1674-5124.2014.01.030
便携式无人机地面控制站设计与实现
李增彦袁 李小民袁 刘新海
(军械工程学院无人机工程系,河北 石家庄 050003)
传统的地面控制系统结构复杂尧体积巨大尧易暴 露目标等[6]特点使得便携式尧轻量化尧功能结构简洁 等特点成为设计地面控制站的重要指标遥 同时传统
收稿日期院2013-02-15曰收到修改稿日期院2013-04-03 作者简介:李 增 彦(1987-),男 ,河 北 石 家 庄 市 人 ,硕 士 研 究 生,专业方向为无人机地面控制系统。
基于ASAAC标准的无人机地面站系统管理方案的设计与实现
向IA发送心跳信息的机制一致。心跳机制如图5所
该IA管理的RE;
Zj\ O
(2) RE的HM模块收到新方案号后,传递给
AM模块;
(3) RE的AM模块根据新方案号以及CM模
块读取的该RE节点的运行方案,关闭旧方案中的
图4系统管理方案切换流程
图5心跳机制
3. 4错误处理机制
所有的故障可记录到本地非易失性存储器或远 程系统日志中,方便后期维护和排故。
2整体方案设计
2. 1地面站系统管理的分层结构
地面站中,有统一的运行蓝图(RTBP: runtime blueprints),定义了地面站在各个层次上所需要的 各类信息,维护了地面站的正常运行,它描述了软 硬件映射关系、进程管理、路由信息、故障管理等 信息。系统管理通过运行蓝图,管理地面站系统的 启动、监控、方案切换与故障管理。
节点是否存在的依据,心跳周期可在运行蓝图中配
(3) IA软件在处理运行时故障时发起的方案
置,默认500mso以N个周期内未收到心跳数据,
切换。
作为节点下线依据。N可以在运行蓝图中配置,默
方案切换过程,切换流程如图4所示。
认为5个周期。IA向GS发送心跳信息的机制与RE
(1) IA的HM模块得到新方案号,并下发给
向域内的IA级系统管理软件上报,根据IA级系统
识,用于唯一标识RE;同时RE接受IA的方案调度,
管理软件下发的软件运行方案,完成软件运行方案
隶属于IA的配置管理,因此,每个RE节点由域标
的切换,启动或关闭指定应用软件。
识加上唯一的节点标识共同表示。
GS01
IA»
RE«
at程圾
组件级
图2 一种地面站的系统管理层次结构
无人机监测系统的设计与实现
无人机监测系统的设计与实现随着科技的不断发展,无人机监测系统在各行各业得到了广泛的应用。
本文将讨论无人机监测系统的设计与实现,包括系统的功能需求、硬件设计、软件设计以及实际应用案例。
一、功能需求无人机监测系统主要用于获取、分析和处理目标区域的数据信息。
根据具体应用的需求,无人机监测系统的功能需求可以有所不同。
下面是一些常见的功能需求:1. 实时图像传输:无人机搭载高清相机或红外摄像头,能够实时传输图像或视频,用户可以通过地面站或移动设备查看监测区域的实时情况。
2. 数据采集与存储:系统能够采集传感器数据,如温度、湿度、气体浓度等,并将这些数据进行存储和分析。
3. 航线规划与自动飞行:用户可以通过地面站预设无人机的航线,无人机能够自动飞行并执行任务。
4. 目标识别与跟踪:系统能够通过图像处理和模式识别算法,自动识别目标并跟踪其运动轨迹。
5. 高精度定位:无人机监测系统需要具备高精度的定位能力,可以通过GPS、GLONASS等卫星系统定位,并支持差分GPS等技术提高定位精度。
二、硬件设计无人机监测系统的硬件设计包括无人机的选型和传感器的选择。
下面是一些常见的硬件设计要点:1. 无人机选型:根据应用需求和航程要求选择合适的无人机。
无人机的载重能力、续航时间以及飞行稳定性是选型的重要考虑因素。
2. 摄像头选择:根据监测需求选择合适的摄像头。
对于需要夜间监测的应用,还可以选择红外摄像头。
3. 传感器选择:根据应用需求选择适当的传感器,如温度传感器、气体传感器等,确保获取到有效的监测数据。
4. 通信模块:选择稳定可靠的无线通信模块,用于与地面站进行实时数据传输。
三、软件设计无人机监测系统的软件设计主要包括地面站软件和嵌入式软件两部分。
下面是一些软件设计要点:1. 地面站软件:地面站软件用于监视和控制无人机,可以实时接收并显示无人机传回的图像和数据,提供航线规划、目标跟踪等功能。
2. 嵌入式软件:嵌入式软件用于无人机上的控制和数据处理。
基于无人机平台对地面测控系统校相的设计与实现
作者简介:雷鸣(1978-),女,硕士研究生,工程师,现主要从事地面测控系统的研究。
基于无人机平台对地面测控系统校相的设计与实现Design and Application of TT&C Ground System Phase Calibration Based on UAV Platform雷鸣(中国西南电子技术研究所,四川成都610036)Lei Ming (Southwest China Institute of Electronic Technology,Sichuan Chengdu 610036)摘要:随着卫星测控领域的飞速发展,我国地面测控站的数量日益增加。
由于工作频段、地理位置和环境因素的不同,各个站之间实际情况有很大差别,传统地面测控站的对塔、射电源与卫星标校技术已不能适应所有站的标校需求。
该文以无人机为平台,设计和实现针对地面测控系统的相位标校的无人机标校测试系统。
这种新的标校方式以其方便灵活、可行性高的特点,必将在未来地面测控系统标校中得到广泛的应用。
关键词:无人机;射电源;标校;校相中图分类号:TN79+2;V279+.3文献标识码:A文章编号:1003-0107(2021)04-0050-04Abstract:With the rapid development of the satellite TT&C field,the number of TT&C Ground stations in China is increasing.Due to the difference of working frequency,geographic locations and environmental factors,the actual situation of each station is very different.The traditional TT&C ground station calibration technology for tower,radio source and satellite can no longer adapt to the calibration needs of all stations.In this paper,we design and implement a UAV calibration test system for key system indicators of TT&C ground system,such as phase calibration.This new TT&C ground system calibration method is convenience,flexible and high reliability,and will be widely used in the future TT&C ground system calibration.Key words:UAV;radio source;calibration;phase calibration CLC number:TN79+2;V279+.3Document code:AArticle ID :1003-0107(2021)04-0050-040引言传统地面测控系统使用标校塔、射电源和卫星进行校相。
小型无人机地面监控系统软件设计与实现
小型无人机地面监控系统软件设计与实现
于歌;刘刚;房建成
【期刊名称】《机械与电子》
【年(卷),期】2007(000)007
【摘要】针对小型无人机飞行监测和控制的任务需求,设计了一种地面监控系统软件.系统实现了导航参数实时获取、飞行控制参数在线调整、航迹规划与回显、数据存储及分析等功能,并为超视距飞行提供了有利保障.经大量完全自主飞行实验结果表明,所设计的监控系统软件不仅能够满足小型无人机下行信道传输数据量大的监测要求,而且可以确保上行信道控制参数高精度、高可靠性的要求.
【总页数】3页(P24-26)
【作者】于歌;刘刚;房建成
【作者单位】北京航空航天大学仪器科学与光电工程学院,北京,100083;北京航空航天大学仪器科学与光电工程学院,北京,100083;北京航空航天大学仪器科学与光电工程学院,北京,100083
【正文语种】中文
【中图分类】TP273
【相关文献】
1.跟踪地面目标小型无人机地面显控平台的设计与实现 [J], 王洋;刘伟;杨国梁;王超
2.小型无人机地面控制站软件的设计与实现 [J], 杨国梁;王玮;郭宗本
3.小型无人机地面监控系统的设计与实现 [J], 高焕超
4.基于Qt的小型无人机地面站软件设计与实现 [J], 贾杰;刘智腾
5.一种微小型无人机地面监控系统软件设计与实现 [J], 司兵;周传忠;于歌
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
浙江大学硕士学位论文摘要摘要近年来,无人机的研究和应用在世界范围内迅速升温,我国也在无人机的研究和发展上做出了相当大的投入。无人机地面站系统是整个无人机系统的指挥控制中心,而地面站软件是地面站系统的重要组成部分。一套功能完善的无人机地面站软件,能够很好地辅助地面操作人员对无人机进行飞行状况监视和实时控制。结合作者参与某型无人飞行器系统中的地面站子系统的研制经历,本文论述了如何应用串口通信编程、组件式GIS开发和ADO数据库访问等技术手段来构建一套功能完善的无人机地面站软件。地面站利用专用数据链系统,通过读写串口来与无人机通信,而无人机下传数据帧的频率很高,因此高速实时串口通信的实现至关重要。我们在实践中采用了改进串口类CSuperSerialPort的实时性及实现一个高精度定时器等手段来满足应用需求。基于ArcGIS地理信息系统和ArcObjects组件式GIS开发技术,实现了地图导航部分的各项功能。同时通过数字高程模型的应用,很好地解决了无人机在三维空间飞行中存在的高空障碍问题。通过利用ADO技术来操作导航数据库,我们实现了地面站软件的航线规划和航迹回放功能。而动态创建数据表和读写BLOB--进制数据两项技术的运用,解决了如何高效率读写数据库以记录众多的飞行航迹的问题。实践表明,通过与地面站系统其他部分的配合使用,该无人机地面站软件的功能已经能基本满足操作员执行无人机试飞任务的需要。
关键词:无人机,串口通信,ArcGIS,航线规划浙江大学硕上学位论文Abstract
AbstractInrecentyears,therehasbeenallincreasingfocusontheresearchandapplication
ofunmannedaerialvehicle(UAV)intheworld,ourcountryisalsomakinga
considerableinvestmentontheresearchanddevelopmentofUAV.TheUAVground
stationsoftwareisallintegralpartofthegroundstationsystem,whichisthecommandandcontrolcenteroftheentireUAVsystem.Afull—featuredUAVgroundstation
soRwaresystemcallsupportthemonitoringandreal—timeremotecontroloftheUAV.
Combinedwithexperiencesoftheauthor,whoinvolvedinthedevelopmentof
a
high—speedUAV,thisarticlediscusseshowtobuildafull—featuredUAVgroundstationsoftwaresystem,byutilizingserialcommunicationprogramming,componentGIS
developmentandADO-baseddatabaseoperationtechnology.
ThegroundstationcommunicateswiththeUAVusingadedicateddatalinksystemthroughtheserialport.Becauseofthehighspeedandfrequencyofdownlink
data,therealizationofhigh—speedreal—timeserialcommunicationisveryimportant.To
meetthereal-timecommunicationrequirement,wechoosetoimprovethereal—time
performanceoftheserialportclassCSuperSerialPortandimplementa
high-precision
timer.BasedonArcGISgeographicinformation
systemsandArcObjectsComponent
GISdevelopmenttechnology,werealizevariousfunctionsofthemap-basedUAV
navigation.Meanwhile,throughtheapplicationofdigitalelevationmodel,we
implementthefunctionofprovidingthree·dimensionalflightnavigationservicefortheUAv.UsingADOtechnologytooperatethenavigationdatabase,werealizetheroute
planningandtrackplaybackfunctionoftheUAVgroundstationsothvare.Withtheuse
oftwotechnologies:DynamicallycreatingadatatableandoperatingBLOB
binary
datawithADOobjects,weachieveahighefficiencyofoperatingthedatabasetorecordalargesizeofflighttrackingdata.Practiceshowsthat,usedinconjunction晰tllotherpartsoftheUAVground浙江大学硕士学位论文Abstract
stationsystem,thebasicfunctionsofthegroundstationsoftwarehasbeenableto
meet
theneedsofthegroundoperatorexecutingUAVfli曲ttasks.
Keywords:UAV,serialcommunication,ArcGIS,flightplanning浙江人学硕士学位论文图目录图目录
图1.1无人机系统的组成……………………………………………………….2图1.2AutoPilot地面站软件的界面……………………………………………..5图1.3AP50地面控制站的界面………………………………………………….5图1.4FY-2地面站软件的界面………………………………………………….6图2.1ArcGIS9产品的体系结构………………………………………………14图2.2ArcObjects组件层次关系图……………………………………………16
图2.3ArcObjects组件对象模型………………………………………………16
图2.4左为规则格网,右为不规则三角网……………………………………17图2.5左为原始数据,右为插值得到的致密数据……………………………18图2.6数据库访问技术的层次结构……………………………………………19图2.7ADO对象模型………………………………………………………….20图3.1地面站软件各模块之间的关系…………………………………………23图3.2地面站软件的概要设计…………………………………………………23图3.3地面站软件的界面分布…………………………………………………24图3.4飞行器管理部分的界面………………………………………………….27图4.1通过串口接收数据的处理流程图………………………………………4l图4.2地面站飞行器状况显示的界面效果……………………………………42图4.3通过串口发送数据的处理流程图………………………………………43图4.4地面站发送指令界面效果………………………………………………44图5.1地图浏览效果图…………………………………………………………46图5.2绘制地图客户图层的效果图……………………………………………48图5.3显示无人机飞行轨迹的效果图…………………………………………48图5.4分层设色区分地形的中国地图…………………………………………51图5.5实时获取鼠标所指点的经度、纬度和高程的效果……………………54图6.1航点管理部分的界面……………………………………………………56图6.2航线管理部分的界面……………………………………………………57图6.3航线在地图上的表示……………………………………………………58图6.4航迹回放部分的界面……………………………………………………6l
IV浙江大学硕:t:学位论文表目录表目录表4.1串口通信实时性对比试验结果…………………………………………33表4.2上行帧的帧格式…………………………………………………………34表4.3上行帧的帧头格式………………………………………………………35表4.4下行帧的帧格式…………………………………………………………36表4.5下行帧的帧头格式………………………………………………………36表6.1WayPointTable航点表……………………………………………………56
表6.2SkyWayTable航线表……………………………………………………..58
表6.3任务管理表TaskTable……………………………………………………59表6.4任务规划航线表…………………………………………………………60表6.5航迹记录表………………………………………………………………60表7.1地面站软件功能测试结果……………………………………………….66
V