利用神经网络建立GPS网络RTK的双差对流层误差模型
利用网络RTK技术进行控制测量的精度评定与分析
利用网络RTK技术进行控制测量的精度评定与分析摘要:传统RTK依靠电台工作精度不均匀且覆盖范围较窄,因而很少用于控制测量工作中,网络RTK技术解决了这些制约因素。
本文结合实例对利用网络RTK技术进行控制测量工作中的精度评定与应注意事项进行分析、阐述。
关键词:网络RTK,控制测量1.网络RTK工作原理为了解决常规RTK技术存在的缺陷,实现区域范围内精度均匀的实时动态定位,网络RTK技术应运而生,其中比较有代表性的就是Trimble的VRS( Virtual Reference Station)虚拟参考站技术和Ashtech的MAC(主辅站技术)。
本文主要以虚拟参考站技术作为研究重点。
虚拟参考站技术就是利用地面布设的多个参考站组成GPS 连续运行参考站网络(CORS),综合利用各个参考站的观测信息,通过建立精确的误差模型(如电离层、对流层、卫星轨道等误差模型),在移动站附近产生一个物理上不存在的虚拟参考站,移动站与虚拟参考站进行载波相位差分改正,VRS技术最大意义在于,它将克服以上的局限性,扩展RTK的作业距离。
与传统RTK技术相比,网络RTK有如下优势:(1)由于接收到的改正信息是由虚拟的VRS所发送,因此无须再独立架设基站,从而减少了仪器及人员的配备,降低了作业成本,提高了RTK作业的机动性与灵活性。
作业过程中节省了基站迁站的时间,从而提高了工作效率。
(2)常规RTK受电台作业距离限制,移动站超出基站有效作用范围时,不得不迁站以延长作业范围,因而造成了误差的累计。
网络RTK无须进行迁站,所以也就避免了由于上述原因产生的累计误差。
并且由于所有的测量点都是基于相同的“参考站”,所以就确保了测区精度均匀、稳定,实现了对整个测区的高精度控制。
(3)常规RTK系统的可靠性取决于单个基站,该基站出现了问题时,将导致移动站解算错误,对作业精度产生严重影响。
而网络RTK是由多个GPS参考站网络来虚拟基准站的,即使单个参考站出现问题也很容易被识别与剔除,不会导致数据被错误使用,有效地保证了系统可靠性。
浅析GPSRTK误差来源及减弱误差的方法

浅析GPSRTK误差来源及减弱误差的方法论文导读:观测方案及精度分析。
影响GPSRTK精度和可靠性的因素。
可靠性,浅析GPSRTK 误差来源及减弱误差的方法。
关键词:GPSRTK测量,精度分析,可靠性1 引言二十世纪下半叶是测绘技术迅猛发展的时期,特别是近十多年来,它获得了突出的成就。
促进这一时期飞跃前进的因素之一就是测量仪器的迅速发展,其中有代表性的是GPS RTK的出现和使用。
它既克服了常规测量要求点间通视、费工费时、精度不均、外业不能实时知道测量成果和测量精度的缺点,又避免了GPS静态定位及快速静态相对定位需要进行后处理的缺点,若内业后处理中发现精度不合乎要求,就需进行返工。
目前RTK实时三维精度可以达到厘米级,但受观测条件和其它因素的影响,RTK测量成果偶尔会产生错误,若不采取必要措施剔除这些错误成果,会对测绘工作造成严重后果[1]。
本文主要分析影响GPS RTK内、外符合精度与可靠性的因素,提出切实可行的方法和措施,保证测绘成果的质量,为测绘生产提供技术支持和理论依据。
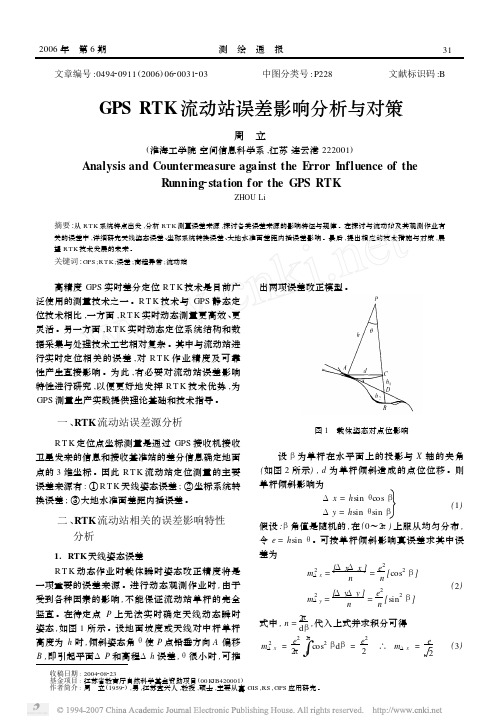
2 GPS RTK定位原理GPS RTK是根据 GPS的相对定位概念,将一台接收机放在已知点上(称为基地站),另一台或几台接收机放在新点上(称为移动站),同步采集相同卫星的信号如下图1:图1 RTK原理将这些观测值进行差分,可削弱和消除轨道误差、钟差、大气误差等的影响,实时定位,精度能大大提高。
RTK采用载波相位观测值,能直接导出卫星和天线之间的总波长数,并能解算模糊值。
在通常的GPS测量中,需要将两点之间的观测值进行后处理才能求出总波长数和模糊值。
论文格式,可靠性。
在 RTK中,基地站的观测值是通过无线电数据链播发给移动站进行数据的实时处理。
由于近年来研究出实时解算模糊值的算法(称为“途中”解算,或称为 OTF),使RTK成为可能。
这些求模糊值的算法能在接收机运动过程中解算模糊值。
目前,在正常条件下,用 RTK解算模糊值只需要10—60s的观测值。
网络RTK的实现方法
网络RTK的实现方法一、所谓网络RTk,也就是用网络信号传输方式代替传统的数字传输电台方式传输差分信号,这样在仪器使用寿命,传输距离,以及抗干扰性上有很大的提高。
现在实现的方法主要有两种,一种是利用建成的CORS网发布传输信号,另外一种是自建基站发送差分电文。
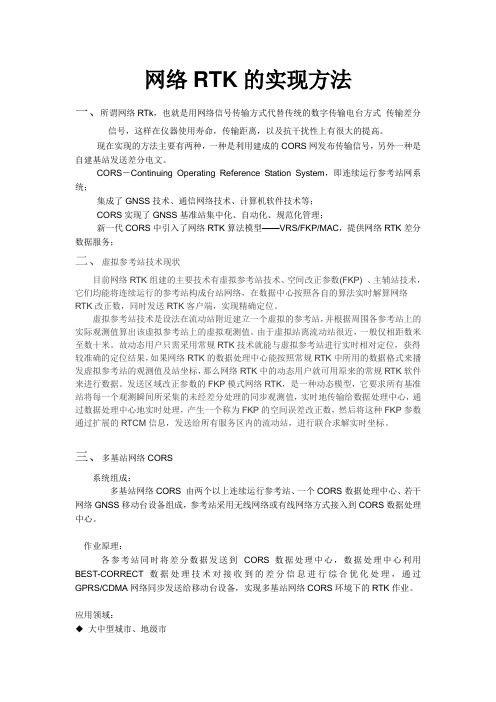
CORS-Continuing Operating Reference Station System,即连续运行参考站网系统;集成了GNSS技术、通信网络技术、计算机软件技术等;CORS实现了GNSS基准站集中化、自动化、规范化管理;新一代CORS中引入了网络RTK算法模型——VRS/FKP/MAC,提供网络RTK差分数据服务;二、虚拟参考站技术现状目前网络RTK组建的主要技术有虚拟参考站技术、空间改正参数(FKP) 、主辅站技术,它们均能将连续运行的参考站构成台站网络,在数据中心按照各自的算法实时解算网络RTK改正数,同时发送RTK客户端,实现精确定位。
虚拟参考站技术是设法在流动站附近建立一个虚拟的参考站,并根据周围各参考站上的实际观测值算出该虚拟参考站上的虚拟观测值。
由于虚拟站离流动站很近,一般仅相距数米至数十米。
故动态用户只需采用常规RTK技术就能与虚拟参考站进行实时相对定位,获得较准确的定位结果,如果网络RTK的数据处理中心能按照常规RTK中所用的数据格式来播发虚拟参考站的观测值及站坐标,那么网络RTK中的动态用户就可用原来的常规RTK软件来进行数据。
发送区域改正参数的FKP模式网络RTK,是一种动态模型,它要求所有基准站将每一个观测瞬间所采集的未经差分处理的同步观测值,实时地传输给数据处理中心,通过数据处理中心地实时处理,产生一个称为FKP的空间误差改正数,然后将这种FKP参数通过扩展的RTCM信息,发送给所有服务区内的流动站,进行联合求解实时坐标。
三、多基站网络CORS系统组成:多基站网络CORS 由两个以上连续运行参考站、一个CORS数据处理中心、若干网络GNSS移动台设备组成,参考站采用无线网络或有线网络方式接入到CORS数据处理中心。
GPS RTK流动站误差影响分析与对策
32 测 绘 通 报 2006 年 第 6 期
同理可得
∫ mΔ2 y
=
e2
2π
2π
sin2 βdβ
0
=
e2 2
∴ mΔy = e 2
(4)
即 ,单杆倾斜影响平面中误差
mΔΡ = e
(5)
姿态角 θ即坡度引起的高程误差
Δh = h1 + h2 = h ( sec θ- 1) + h2
dx
cos B cos L
d y = d H cos B sin L
(7)
dz
sin B
式中 , d x , d y , d z 表示平移参数误差 ; d H 表示大地
高的误差 ; B , L 表示大地纬度和经度 。
假设 B = 40°, L = 110°时 , 其大地高对平移参数的
影响见表 3 。
表 3 大地高对平移参数的影响
m
d H 0. 5 1. 0 2. 0 3. 0 4. 0 5. 0
d x - 0. 18 d y 0. 40 d z 0. 32
- 0. 26 0. 72 0. 64
- 0. 52 1. 44 1. 29
- 0. 79 2. 16 1. 93
- 1. 05 2. 88 2. 57
分析表 1 可看出 :姿态角即坡度引起的平面误 差随姿态角和天线高度的增大而迅速增加 。实际 R T K作业时 , 应尽量在待定点上以静态或准动态 方式置平对中和确定控制天线高度在 1. 5 m 以下 。 那么这项误差可望控制在 ±5 cm 左右 。
一般来自地面本身的不规则起伏应在 3 cm 以 内 , 当 h 取 < 2 m ,θ≤5°, h2 = 0. 030 m 时 , 姿态角 即坡度引起的高程误差Δh 见表 2 。
全球卫星导航系统信号传输误差模型建立计算
全球卫星导航系统信号传输误差模型建立计算引言:随着全球卫星导航系统(GNSS)的广泛应用,信号传输误差成为影响导航精度的关键因素之一。
因此,建立适用的信号传输误差模型并进行精确计算具有重要意义。
本文将介绍全球卫星导航系统信号传输误差模型的建立和计算方法。
一、全球卫星导航系统信号传输误差的来源全球卫星导航系统信号传输误差包括多径效应、大气延迟、钟差、电离层延迟等。
这些误差源对信号传输造成衰减、延迟、非对称等影响,进而影响到定位和导航的准确性。
1. 多径效应多径效应是指导航接收机接收到多个路径上反射的信号,造成接收信号中出现多个相位,从而导致定位误差增加。
多径效应的产生与导航信号与地面建筑物、地形、水体等障碍物的反射有关。
2. 大气延迟大气延迟是由于卫星信号在穿越大气层时,受到大气介质的折射和散射而产生的延迟效应。
大气延迟的大小与卫星信号通过的大气条件、卫星高度角、方向等相关。
3. 钟差钟差是指卫星上的原子钟与地面接收机自带的原子钟之间的时间差异。
由于钟差会直接影响到导航信号的时间标定,因此它被认为是一种主要的误差源。
4. 电离层延迟电离层延迟是指卫星信号在穿越电离层时受到电离层中电子密度分布的影响,从而引起的相位和频率的变化。
电离层延迟的强度和分布受季节、太阳活动等多种因素影响。
二、全球卫星导航系统信号传输误差模型的建立为了更准确地描述全球卫星导航系统信号传输误差,研究者们通常建立各种数学模型来表示不同类型的误差源。
1. 多径效应模型多径效应模型可以通过统计分析和实测数据拟合得到。
其中代表性的模型包括理论模型和经验模型。
理论模型基于射线追踪原理,考虑了导航信号与地面障碍物间反射的物理原理;经验模型基于实际测量数据,通过拟合曲线得到多径误差的统计性质,具有较高的适用性。
2. 大气延迟模型大气延迟模型通常使用对流层模型和电离层模型进行描述。
对流层模型通常采用延迟改正系数和站间同步观测数据进行计算;电离层模型则利用国际电离层图斜晕(IGS TEC)数据,通过插值和拟合方法计算电离层延迟。
浅析网络RTK差分数据线性模型
摘 要 : -T 同 ̄ R K日益成 为G s P 主要 的测量方 式, 而差分数据的精度 是 网 ̄ R K -T 的技术 关键 , 针对 其中 两种常 见的线性 内插 模型进 行 了 深 入 的分析, 针对线性组合法 , 出 了通过 加权提 高精度 的方法, 提 对减小卫星轨道误 差, 流层延迟误差 , 对 特别是 电 离层延迟误 差有 着显著地
l V △ R hR 2 V
令
A VR △VR V=
a =
△V : R
△ V R
㈦
利 最 二 可 得I/ ) 从 求 流 站 用 小 乘 获 :2 而 得 动 的 I A ¨=
改数 。
1 基 本原理
;
ห้องสมุดไป่ตู้
.
1 1线性 插值 法( l . LM) B 首 先 , 以 简单 话 来 看 待这 个 问 题 , 模 型 至 少需 要 3 测站 , 可 △ 此 △ 个 = 我们 就 可 以 假设 有 3 个参 考 站 为A B c, D为流 动 站 , 与D离得 且 较近, 网络 RTK常用 站 星 双 差 模 型 :
此 时 线 性 组 成 的 观 测 值 是 不 受 卫 星 星 历 和 电离 层 延 迟 影 响
l D 一 △ c=
△
△V =△Vp+△Vd △VN一 Vd o+△V p— △ i n 唧 +△
q
即+s A △
;
其 中 , p为双差 距 离 值 ; △V △Vd 为 双 差 残 余 轨 道 偏 差 ; p △ d。 残 余 的 电 离 层 延 迟 ; i 为 △V 为残 余 的对 流 层延 迟 , △V 双 差后 的 多 路径 效 应 误 差 ; △V s 为 双 差 后 的载 波 相 位观 测值的测量噪音 ; 后两 项 与 测站 间的 距 离 无 关 。 : 令
BP神经网络模型在GNSS高程拟合中的应用
BP 神经网络模型在 GNSS 高程拟合中的应用摘要:全球导航卫星系统(GNSS)是一种高度精确、连续、全天候和近实时微波技术,其中GPS的应用最为广泛,目前GPS已经能够达到毫米级的平面坐标定位精度,这种优势能够大大缩减人工测量的时间,提高效率,但是由于GPS所测高程和我国工程测量中使用的高程基准面不同使得GPS高程测量值的应用受到限制。
针对将GPS高程测量值通过拟合方法转换为工程坐标下的正常高的研究有着广泛的实用价值。
本文采用目前流行的BP神经网络法对测区范围内GPS所测得的大地高数据进行拟合,基于GPS测量得到已知点坐标和高程异常,建立两者之间的神经网络关系,并对网络进行训练,根据预测值和实际值之间的差异对网络中的权值和阈值进行重复计算修改,最后使得预测与实际值之间的误差满足要求,计算外符合精度并对未知点的高程异常值进行预测。
通过MATLAB实现BP神经网络高程拟合并与多项式曲面拟合方法进行精度比较,最后得出BP神经网络拟合精度高且相比于多项式曲面拟合法具有准确性,可靠性和稳定性。
关键词:GPS;高程拟合;BP神经网络一、引言GPS技术的应用对于工程测量带来了巨大的变革,GPS具有三维定位,自动化程度高,观测时间短等优点,在我国工程测量和大地测量中的使用频率越来越高。
参考椭球面和似大地水准面之间存在差异,这个差异也就是我们俗称的高程异常,由于地球质量分布不均匀,导致了高程异常值的变化,无法直接获得高程异常值。
因此我们需要对高程异常值进行拟合,以获得满足工程测量精度的正常高。
GPS测量由于自身优点能够很好的满足我们的需要,因此进行GPS高程拟合研究有广泛的实用价值。
本文结合工程中的具体应用,运用BP神经网络法拟合方法及多项式曲面拟合法进行拟合,利用MATLAB强大的矩阵计算能力对数据进行编程运算,求解参数,最终得到不同的高程拟合模型,对模型结果进行精度计算。
二、GPS高程拟合原理我国使用的高程系统是基于似大地水准面的正常高,而GPS采集的数据是基于WGS84椭球下的大地高程数据。
GPS网络RTK系统的算法及定位精度研究
GPS网络RTK系统的算法及定位精度研究一、本文概述背景介绍:概述部分应该介绍GPS技术的发展背景,以及网络RTK(RealTime Kinematic)技术在GPS定位中的重要性和应用前景。
可以提及GPS技术在全球定位系统中的应用,以及网络RTK技术如何提高定位精度和可靠性。
研究动机:应当阐述研究网络RTK系统算法及其定位精度的动机。
这可能包括现有技术的局限性,例如在特定环境下的定位误差、系统延迟问题,以及对更高精度定位的需求。
研究目标和问题:概述中应明确本文的研究目标,比如旨在提出新的算法来提高网络RTK系统的定位精度,或是优化现有算法以适应不同的应用场景。
同时,概述研究将解决的关键问题或挑战。
研究方法和结构安排:简要介绍本文将采用的研究方法,比如算法设计、仿真测试、实地试验等。
概述还应该提供文章的基本结构安排,指出各个部分将讨论的内容。
随着全球定位系统(GPS)在各行各业的广泛应用,定位精度成为了衡量GPS技术性能的关键指标。
网络RTK技术作为一种提高GPS 定位精度的有效手段,近年来受到了广泛关注。
本文旨在深入研究网络RTK系统的算法优化问题,并探讨如何进一步提升其定位精度。
研究动机源于现有网络RTK系统在特定环境下仍存在定位误差和系统延迟的问题,这限制了其在高精度要求领域的应用。
为此,本文将提出新的算法框架,旨在克服这些挑战,并满足日益增长的高精度定位需求。
二、网络系统概述GPS网络RTK系统,即全球定位系统实时动态差分技术(RealTime Kinematic, RTK)的网络版,是一种高精度、实时动态的定位技术。
它通过建立一系列基准站,形成一个网络,利用这些基准站收集的GPS观测数据,进行差分处理,从而提高定位精度。
本节将重点概述GPS网络RTK系统的基本构成、工作原理及其在现代定位技术中的重要性。
(1)基准站网络:由多个分布在不同位置的基准站组成,这些基准站配备高精度的GPS接收设备和通讯设备。
RTK数据的误差分布研究
RTK数据的误差分布研究本文通过对数据的测量,分析RTK测量精度及相差数据的产生原因,提出解决方案,提高数据有效率。
标签:测量数据;RTK误差RTK是GPS测量方法,它采用载波相位动态实时差分的方法,能够在野外获得定位精度为厘米级的测量数据。
它提高了各种控制测量的效率。
卫星定位技术的迅速发展使人们对高精度的位置信息的需求也越来越强烈。
1、RTK测量精度和可靠性因素天线类型、处理软件、数据链都会对RTK系统造成影响,所以,RTK设备的优劣不仅影响影响成果的可靠性,也影响到了测量精度。
观测方案也会对RTK的可靠性和质量产生极大影响,其主要内容有:观测次数、基准站位置的选择、历元数、坐标系统的选择等。
环境对RTK影响的因素主要有基准站与流动站之间的障碍物、平面覆盖、地形、电波干扰、多路径误差等。
另外,观测者的经验和专业水平也会对精度和可靠性产生很大影响。
如测量天线高、对中误差等,都会影响到测出的坐标。
RTK作业方式特殊,同时RTK作业实时快速,但必要的检核条件缺乏,因此,测量的成果也存在不可靠性。
其主要的影响因素有:a.测量作业的控制区域。
测量作业的范围受到转换控制点的限制,通常应在转换控制点的控制圆区域内作业,否则会影响到测量精度。
b.受转换参数的影响。
由于GPS测量采用WGS284坐标系统,RTK测量时必须先求解转换参数,以便将WGS284坐标转到地方坐标。
RTK测量的基础是转换参数的求解,影响RTK测量精度的关键因素是转换参数的精确程度。
c.卫星信号的影响。
GPS是通过卫星来定位的,正常接收卫星信号是GPS定位的基础。
GPS测量要求流动站和基准站的天线能同时接收到相同数量的卫星信号,才能保确保计算的正确性。
因卫星的分布随着时间的变化而改变,所以,不同时段卫星的位置和数量都会不同。
在卫星位置图形较佳和数量较多时,初始化时间缩短,天线接收信号好,且精度较高;反之,测量精度很差,使初始化时间长,而且不能计算出固定解,流动站和基准站不能同时接收到足够的卫星信号。
神经网络在GPS高程拟合中的应用
神经网络在GPS高程拟合中的应用神经网络在GPS高程拟合中的应用摘要:本文介绍了神经网络在GPS高程拟合中的应用,包括神经网络模型的构建、数据集的准备、模型训练及测试等流程。
通过实验验证,神经网络模型在GPS高程拟合中具有良好的适应性和精确度,能够有效地解决GPS高程精度不够高的问题。
第一部分:引言随着GPS技术的不断发展,越来越多的GPS数据被应用到各行各业中,其中高程数据也逐渐成为热点话题。
然而,由于受多种因素的影响,GPS高程数据存在较大误差,这给高程拟合造成了很大的困难。
为了提高GPS高程数据的精确度,本文提出了利用神经网络进行高程拟合的方法。
第二部分:神经网络模型的构建本文采用了三层前馈神经网络模型,具体包括输入层、隐层和输出层。
其中输入层大小为4,分别是经度、纬度、时间以及GPS 高程数据,输出层大小为1,表示高程拟合值。
隐层可根据实验需要修改。
第三部分:数据集的准备为了构建神经网络模型,需要准备大量的高程数据进行训练。
本文选取了美国国家地理空间情报局(NGA)提供的高程数据,并进行了预处理和划分,分为训练集、验证集和测试集。
其中训练集和验证集用于模型训练,测试集则用于模型测试和评估。
第四部分:模型训练及测试在模型训练中,本文采用了反向传播算法及随机梯度下降法进行神经网络模型的优化和训练,并通过交叉验证的方式调节模型参数,以充分利用数据集进行训练。
在模型测试中,本文采用了均方误差(MSE)和平均绝对误差(MAE)作为评价指标,评估了模型的预测精度和拟合能力。
第五部分:结果与讨论实验结果表明,神经网络模型在GPS高程拟合中具有很好的适应性和准确度。
在测试集上,MSE为,MAE为,表明模型预测误差很小,能够很好地拟合GPS高程数据。
同时,在模型构建过程中,可根据实验需要进行网络结构、数据处理和参数调节等优化,以进一步提高模型的精确度和适用性。
第六部分:结论本文基于神经网络技术,提出了一种利用GPS数据进行高程拟合的方法,并进行了大量实验验证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
t p s h r r r s p e e td r o p e e e r ,i r s n e .T e a c r c ft p s h r e a d li w t i m ,i pt fi tr oa in o o h c u a y o o o p e i d ly mo e s i n 5 c r c h n s i o ep lt e n o
此会引入高程方向的系统性偏差。 本文提出了基于神经网络的空间对流层误差建 模模型 , 该对流层误差模 型不仅考虑了平面位置关
收稿 1 :0 1 71 3期 2 1- —2 0
作者简介 : 陈远鸿 , , 8 年生, 男 1 1 9 工程师 , 从事 G S 数据处理及相关测绘工作. m i e I 7 3 @13 cm NS E— a : a i 0 6 .o l le 6
利用 神 经 网络 建 立 G S网络 R K 的双 差 P T 对 流 层 误 差模 型
陈远鸿 邱 蕾 冯玉钊
582\ 10 6
,) 1 深圳市勘察研究 院有 限公 司 , 深圳
\) 2 深圳市地籍测绘大队, 深圳 580 100
/
摘 要 为减小对流层误差改正数中系统偏差的影响以提高对流层改正精度, 提出了基于神经网络的顾及空间
afc ig t e a c r c ft e ln - i a c K. we e , h lv t n d f r n eb t e n t e rf r n ep a e a d f t h c u a y o o g d s n e RT Ho v r t e e e ai i e e c ew e h e ee c ln n e n h t o f
l 刖 舌
站的误差信息, 同时模型 的建立至少需要 3 个参考 站 。对 流层延 迟误 差 受 高 程影 响 比较 显著 , 得 对 使
流层误 差在水 平方 向和 高程方 向空 间相 关特性 存在
网络 R K中 G S T N S数据处理的关键 问题包括
基准站问双差模糊度的确定 、 流动站误差计算与消 除和流动站模糊度的确定。流动站对流层误差的准
确建模是其中一个关键问题 。 目前 , . 常用 的网络内 插模型主要是线性 内插模型 , 该模型的本质是在平
面 内建 立对 流层误 差 模 型 , 后进 行 内插 得 到 流 动 然
明显差别 , 将上述模型直接应用于对 流层延迟误 差
改正时, 由于仅仅在平面上建立对流层误差模型 , 因
Ch n Yu n o ¨ e a h ng
.
Q uL i adF n uh o’ i nh n Ivsiain& Ree rh Isi t C ..Ld 1 S e ze n et t g o sac n tue o t t..S ez e 5 2  ̄ h nh n 0 6 1 8
的对流层误差建模模 型 , 该模型的对流层延迟误差改正在 网内外精度均达 5a m。
关键 词 G S 网络 R K 对流层误差; P; T; 神经网络; 高程差异
中图分类 号 :2 7 P0 文 献标识码 : A
A TROPOS HERI P C DELAY ODEL FOR S NET M GP RTK TABLI HED ES S BY E US OF ARTI I AL F CI NEURAL NETW ORK
p i t n t e newo k o u fn t r . on s i h t r ro to ewo k Ke y wor : ds GPS;newo k RTK ;to s h rc e o ; e r ln t r t r r po p e i r r n u a ewo k;ee ai n dfe e c lv to i rn e f
te r vn tto l a s h e it n o r po p e i ro n t e s se a he h c u a y o r p s h r h o i g sai n wi c u e t e d va i fto s h rc e r i h y t m nd t n t e a c r c fto o p e e l o c re t n wi e lwe e A e to o p e i ro d lb s d o e r lnewo k,tki n o a c u tt e s a e o ci l b o r d. n w rp s h rc e rmo e a e n n u a t r o l a ng it c o n h p c
第3 卷 第6 1 期
2 1 1 月 01 年 2
大 地 测 量 与 地 球 动 力 学
J RNAL O EOD Y OU FG ES AND GE YNAMI S OD C
Vo. . 131 No 6
D c .0 1 e . 2 1
文章 编号 :6 154 (0 10 -180 17 -92 2 1 )602 -4
目前常用的网络内插模型主要是线性内插模型该模型的本质是在平面内建立对流层误差模型然后进行内插得到流动站的误差信息同时模型的建立至少需要3个参考对流层延迟误差受高程影响比较显著使得对流层误差在水平方向和高程方向空间相关特性存在明显差别将上述模型直接应用于对流层延迟误差改正时由于仅仅在平面上建立对流层误差模型因此会引入高程方向的系统性偏差
\ )hn e aat l u ei n ap gO c,hn e 5 83 2 Se hnC dsa Sr y gadM p i f eS e hn 10 4 z r v n n f i z
/
Abs r c I eV r a R frneSa o V S eh o g ,a op ei rf c o r ri tem i fc r t a t nt iu l ee c t i h t e t n( R )t nl y t shr e at ner a t c o m c r i o sh nao