ADAMS上机例题解析
ADAMS全面教程
数字工程 Digital Engineering
Design - Development - Production System-focused Virtual Prototyping
Virtual Mock-up
Virtual Prototyping
& Testing
Virtual Production
• ADAMS/Engine 引
擎
CAD 嵌入模块
• ADAMS/Pre
轿车性
能
• ADAMS/Tire 轮胎
• ADAMS/Rail 机车31
MSC. Software
MSC.ADAMS、MSC.Nastran、MSC.Fatigue集成方式
* 由MSC.Nastran对部件进行有限元分析,生成含有模态信息的mnf文件; * 将mnf文件导入MSC.ADAMS中,创建刚柔耦合模型; * 由MSC.ADAMS对机构进行动力学分析; *分析得载荷和位移等边界条件可转入MSC.Nasatran进行详细的应力、振动、噪音分析; 32 *分析得到的载荷时间历程信息可通过格式文件转入MSC.Fatigue中进行疲劳分析。
建模
PPrroodduucctt DDaattaa MMaannaaggeemmeenntt SSyysstteemm
测试
验证
优化
a
自动化
34
产品生命周期 Product Life Cycle
Concept
Design Validate Assembly Service
维护方便吗 ?
满足要求 ?
能做出来吗 ?
度和旋转顺序。
• 常用为3-1-3旋转法则:1、2、3代表x 、y、z
ADAMS操作与实例ppt课件
Open/Closed Profile, Depth, Anchor CSM, Parent Part
Open/Closed Profile, Sweep Angle, Anchor CSM, Parent Part
Normal to grid(垂直于栅格):当工作栅格工作 时,垂直于栅格;否则,垂直于屏幕。 Pick feature(选取方向):通过一个在栅格或者 屏幕平面内的方向矢量去顶连接方向。
21
运动副约束(简单)
工具图标 名称 转动副
ADAMS操作与实例
图例
限自由度 移动转动
32
移动副
23
圆柱副
22
New Part , Add to Part, On the Ground
14
ADAMS操作与实例
Type Links
Tool Graphic
Plates
Extrusions
Revolutions
Parameters
Width, Depth,2 Anchor CSM (Length), Parent Part
1)Space Fixed/Fixed 力的方向全局坐标系中固定,不随零件运动而变化。 2)Body Fixed/Moving 力的方向在所作用零件的零件坐标系中不变。 3)Two Bodies/Between Two Bodies 力的方向在两个零件上的力作用点连线上。
30
ADAMS操作与实例
通过施加接触力,可以描述自 由运动的物体在相互接触的时 候的运行情况。线框模型与线 框模型之间,实体模型与实体 模型之间都可以添加接触力, 但是除球体与平面的接触 (sphere-to-plane contact)外, 线框模型与实体模型之间不能 添加接触力。 当定义复杂或特殊的受力情况 时要用到柔性连接力,具体使 用方法这里不作介绍。
《ADAMS全面教程》
精选课件
1
主要内容
• 机械系统的组成 • 参考机架 • 坐标系 • 机械系统的自由度 • 速度、加速度和角加速度
精选课件
2
机械系统的组成
• 机械系统是机器和机构的总称,由构件和零件组成。 • 机构由两个以上具有相对运动的构件组成,用于传
递运动或改变运动形式。
• 机器是由若干机构组成的系统。 • 机构的构件既保持接触,又有一定的相对运动。 • 运动副:两构件既保持接触,又有一定的相对运动
精选课件
22
虚拟样机技术 在各主要工业部门都取得显著成就
汽车
铁路、工程机械 航空、航天、国防
精选课件
机械
23
飞机着陆时的起落架变形
精选课件
24
飞机着陆时的起落架变形
精选课件
25
ADAMS/PPT (后处理)
精选课件
26
液压+机械仿真
Hydraulic + Mechanical Simulation
维护方便吗 ?
满足要求 ?
能做出来吗 ?
做什么样的 ?
能工作吗 ?
可靠精吗选课?件
35
Reduced Risk Through Better Information
Concept
Design
Validate Assembly Service
With Virtual Prototyping
IMPROVEMENT
• Edit (编辑)
• View (视窗)
• Build (建模)
• Simulation (仿真)
• Review (观察)
• Settings (设置)
ADAMS实例仿真解析
参考文献
【1】《虚拟样机技术与ADAMS应用实例教程》-----北京航空航天大学出版社。
【2】《MD ADAMS虚拟样机从入门到精通》---------机械工业出版社。
模型建立··························································3
约束添加··························································9
运动添加··························································11
模型仿真··························································14
小结······························································17
参考文献··························································17
小 结
通过利用ADAMS对旋转机的虚拟建模以及仿真分析,我们可以对选钻机的工作情况有一个较为真实的了解,对我们以后设计选钻机有很大的帮助,可以大幅度上减少我们的作业时间,极大地提高了我们的工作效率,而且很大程度上减少了设计错误。
ADAMS是一款虚拟仿真软件,一直受到各行各业的广泛青睐,对设计及分析有很大帮助,是工程上不可缺少的一款软件,而且在市场上,一直备受欢迎。ADAMS本身也在随着社会科技的发展不断更新,不断地为社会服务。
adams入门详解与实例
adams入门详解与实例
ADAMS(自动动力动态分析)是一种模拟技术,用于研究机器运
动和控制程序之间的动态行为。
它可以用于电子、车辆和液压驱动器,以及机器人、电动系统和航空系统等不同类型的机器。
ADAMS可以显示动态输出,并为设计者提供反馈调节以提高系统性能。
ADAMS的主要功能是仿真。
它可以进行广泛的机械和动力仿真,
包括求解机器的动态响应,解决非线性的动力系统问题,研究电气机
械系统的特性,以及研究包括弹性机器和电磁荷载在内的复杂载荷系
统的动态行为。
ADAMS的精度高,可以轻松地模拟出机器系统的动态行为,并能够根据对真实机器系统的行为分析出有效的解决方案。
ADAMS可以使用多种建模语言,如MBL(DynaMath块模型库)、MIT(机械工程应用技术]=]、FORTRAN等,用于创建完整的动态模型。
ADAMS使用结构化的块,元素和模型的类库,可以轻松地创建模型,简化用户设计过程,而不会失去模型的质量和精度。
ADAMS可以通过配置属性自定义模拟,可以设置步骤、变量可视性、分片装置、动态增益、模型粒度等参数来获取有关过程的动态变
化的更多信息。
它提供了多种模拟类型,可以直接在机器和控制程序
之间进行转换。
ADAMS还支持同步和逐柱分析,可以自动检测和修复部件被夹紧的情况。
ADAMS可以使用MATLAB、MS EXCEL等软件的报告功能,可以很容易地将试验结果和分析结果可视化。
它可以在模拟时生成表格和图形,从而使设计者可以快速确定系统性能的改进方案。
adams2012简单实例赏析_入门级别、感受adams
测量一重为1kg的石块下落的位移、速度、加速度曲线,时间为1s
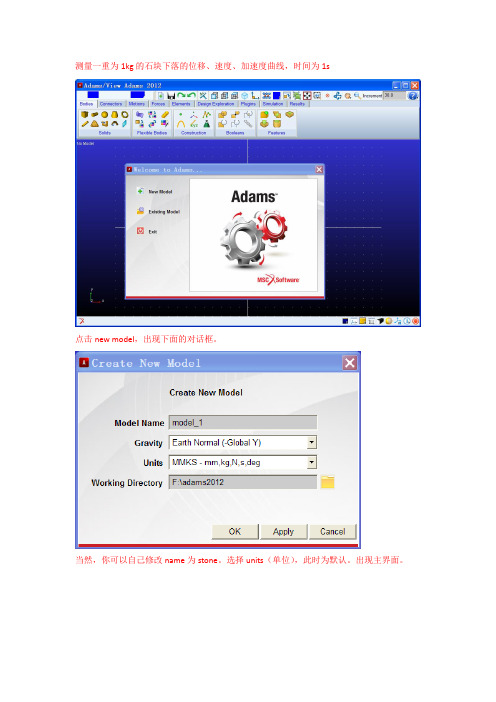
点击new model,出现下面的对话框。
当然,你可以自己修改name为stone。
选择units(单位),此时为默认。
出现主界面。
好有这步。
)
选择球,半径为50mm
圆心为坐标原点。
接下来
质量为1kg,只有这一个参数。
下面是建立测量。
测量位移如下图:y轴的
此时点击apply。
出现下面的曲线框,由于还没有仿真,故没有曲线,下同
速度曲线,当然还是y轴的
仍然点击apply
加速度曲线,如下
总的曲线如下图:
点击simulation,出现下面的框,设定时间为1s,按顺序依次点击:
此时就可以看到曲线在动态变化
任选一个曲线框,右击,进入full plot
注意上面一定要点选surf,才能出现所想要的曲线
通过上述仿真,可以看出位移为-4903.3mm,速度为-9806.6mm/s,加速度为-9806.6mm/s2。
ADAMS分析实例超值
A D A M S 分析实例-定轴轮系和行星轮系传动模拟有一对外啮合渐开线直齿圆柱体齿轮传动.已知ο20,4,25,5021====αmm m z z ,两个齿轮的厚度都是50mm 。
⒈启动ADAMS双击桌面上ADAMS/View 的快捷图标,打开ADAMS/View 。
在欢迎对话框中选择“Createanewmodel ”,在模型名称(Modelname )栏中输入:dingzhouluenxi ;在重力名称(Gravity )栏中选择“EarthNormal(-GlobalY)”;在单位名称(Units )栏中选择“MMKS –mm,kg,N,s,deg ”。
如图1-1所示。
图1-1欢迎对话框⒉设置工作环境2.1对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(WorkingGrid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和500mm ,间距(Spacing )中的X 和Y 都设置成50mm 。
然后点击“OK ”确定。
如图2-1所表示。
2.2用鼠标左键点击选择(Select )图标,控制面板出现在工具箱中。
2.3用鼠标左键点击动态放大(DynamicZoom )图标,在 模型窗口中,点击鼠标左键并按住不放,移动鼠标进行放大或缩小。
⒊创建齿轮3.1在ADAMS/View 零件库中选择圆柱体 (Cylinder )图标,参数选择为“NewPart ”,长度(Length )选择50mm (齿轮的厚度),半径(Radius )选择100mm(10025042z m 1=⨯=⨯)。
如图3-1所示。
图2-1设置工作网格对话框图3-1设置圆柱体选项3.2在ADAMS/View 工作窗口中先用鼠标任意左键选择点(0,0,0)mm ,然后选择点(0,50,0)。
ADAMS上机大作业
ADAMS 上机大作业设计弹簧挂锁,用来夹紧登月仓和指挥服务仓。
其物理样机模型如图1所示,虚拟样机模型如图2所示。
参考资料:ADAMS_View 使用入门Program Files\ Adams 11.0\`aview\ Examples\ Latch\ 所有文件图1 弹簧挂锁物理样机模型 图2 弹簧挂锁虚拟样机模型 设计要求:1、 能产生至少800N 的夹紧力。
2、 手动夹紧,用力不大于80N 。
3、 手动松开时做功最少。
4、 必须在给定的空间内工作。
5、 有震动时,仍能保持可靠夹紧设计内容:1、创建一个包括运动件、运动副、柔性连接和作用力等在内的机械系统模型;Build.cmd2、模拟仿真模型在实际操作过程中的动作来测试所建模型;Build.cmd Test.cmd3、将模拟仿真结果与物理样机试验数据对照比较来验证所设计的方案;Test.cmd, Test_dat.csv, Validate.cmd4、细化模型,使你的仿真测试数据符合物理样机试验数据;Validate.cmd, Refine.cmd5、深化设计,评估系统模型针对不同的设计变量的灵敏度;Refine.cmd, Optimize.cmd6、 优化设计方案,找到能够获得最佳性能的最优化设计组合;Refine.cmd ,Optimize.cmd7、 使各设计步骤自动化,以便你能迅速地测试不同的设计可选方案。
Optimize.cmd, Latch.bin注:在练习时遇到困难可用上述阶段性cmd 文件(Import file )进行练习,有下划线的是做完该阶段保存的文件名。
最后要从头到尾独立完成全部工作。
附:第5、6部分的一些参数:设计变量名及取值 优化时的变量及其取值限制。
ADAMS上机练习1
ADAMS 上机练习1
1.熟悉ADAMS/View使用界面: 菜单、工具条
2.ADAMS/View的基本设置:坐标系、视图方向、网格、单位制、重力、工作目录
3.ADAMS/View几何建模的基本操作:
点、标记、直线及多义线、圆弧、样条;
简单形体:连杆、多边形板、立方体、圆柱、球、环、无厚度平板、拉伸、回转体
附加特征:倒角、倒圆、开孔、凸台、挖空
布尔操作:Union, Merge, Intersect, Cut, Spli
运用视图缩放、平移、旋转操作,观看较复杂的形体。
改变某一物体的尺寸及其材料属性,计算其惯性参数。
4.创建一个四杆机构:建立一个新数据库,命名为Fourbar.bin, 先画4个点决定其位置,画三个杆件,加
上铰链,在第一个杆件上加回转运动,进行运动仿真,观看它是何种四杆机构。
改变铰链位置,使它成为曲柄连杆机构、曲柄摇杆机构或双摇杆机构。
Adams参数化建模案例
C(0, L2bc L2ab ), D(0,Lad),E(-25, 25 L2bc L2ab ,-25)
3.6 机构的参数化建模与设计
实例10: 机构的参数化建模
3.6 机构的参数化建模与设计
实例12: 机构的装配法建模
4. 创建运动副
➢ 转动副:Joint_O(Part1,ground), Joint_A ( part1 , part2), Joint_D(part4,ground), Joint_F(part5,ground)
➢ 2构件转动副:Joint_B(part2,part3, part2上端点, part3左端点), Joint_C(part4, part3, part4左端点, Part3右端点),Joint_E(part5,part3,part5下端点, part3上端点)
Marker3,Cam ➢ 创建凸轮几何体:ExtrusionAdd to part,
Curve, About Center, L10单击cam,curve ➢ 删除凸轮板 ➢ 删除运动MOTION_T ➢ 创建凸轮副:Point-CurveMarker3, Curve
3.6t_Op(part1,ground)
3.6 机构的参数化建模与设计
实例12: 机构的装配法建模
5. 装配模型
➢ Simulation ControlDetail Siminitial conditionSave Model(six_bar_assemble)
➢ 删除固连副:Joint_Op ➢ 施加运动:Joint_O(36°/s)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ADAMS上机实验报告
姓名:崔哲华专业:工程力学学号:1608074214一、问题描述凸轮推杆机构如图1所示。在图示瞬时,已知凸轮半径为R,60,凸轮的速度和加速度分别为v和a。试求图示瞬时推杆AB
的速度和加速度,并与理论值比较。
图1.凸轮推杆机构二、ADAMS建模分析在该问题中,凸轮作为主动件,在地面上做水平直线匀变速运动,其速度方向及加速度方向均水平向右。在凸轮驱动下,杆件AB在竖直方向做直线运动。因而,建立此模型需要3个部件,即大地(part1)、凸轮(part2)、推杆AB(part3)。3个约束,即凸轮与大地之间用移动副连接、推杆AB与大地之间用移动副连接、凸轮与推杆AB之间是点线约束。以下建模中,用半圆弧代替凸轮,用矩形代替推杆。
三、ADAMS建模步骤1、设置工作栅格Menu>Settings>WorkingGird:首先设置工作平面大小(SIZE)为
2000mm×2000mm,其次设置栅格间距(Spacing)为25mm,其余设
置不变,点击OK,如图2所示。
图2.设置工作栅格2、创建半圆弧1
Bodies>Construction>Geometry:Arc>NewPart:在Radius前的方
框中打对勾,在后面的方框中输入40.0cm。StartAngle(起始角度)输入0.0d,EndAngle(终止角度)为180.0d,圆弧不闭合,如图3所示。
图3.半圆弧1参数设置Menu>View>CoordinateWindow:打开坐标窗口,在原点附近点击
右键,弹出坐标窗口1,输入坐标(0.0,0.0,0.0),点击Apply,再点击右键,弹出坐标窗口2,输入坐标(400.0,0.0,0.0)点击Apply。得到半圆弧1,如图6所示。
图4.坐标窗口1图5.坐标窗口2图6.半圆弧13、创建矩形
Bodies>Construction>Geometry:Polyline>NewPart:创建多段线,
不闭合。如图7所示。图7.多段线参数设置Menu>View>CoordinateWindow:打开坐标窗口,在原点附近点击
右键,弹出坐标窗口3,输入坐标(150.0,400.0,0.0),点击Apply,再点击右键,弹出坐标窗口4,输入坐标(250.0,400.0,0.0)点击Apply,再点击右键,弹出坐标窗口5,输入坐标(250.0,900.0,0.0),点击Apply,再点击右键,弹出坐标窗口6,输入坐标(150.0,900.0,0.0),点击Apply,再点击右键,得到矩形,如图8所示。
图8.绘制矩形4、创建半圆弧2Bodies>Construction>Geometry:Arc>AddtoPart:在Radius前的
方框中打对勾,在后面的方框中输入5.0cm。StartAngle(起始角度)输入0.0d,EndAngle(终止角度)为180.0d,圆弧不闭合,如图3所示。
图9.半圆弧2参数设置先选中矩形(Part3),然后,Menu>View>CoordinateWindow:打开坐标窗口,在原点附近点击右键,弹出坐标窗口7,输入坐标(200.0,400.0,0.0),点击Apply,再点击右键,弹出坐标窗口8,输入坐标(150.0,400.0,0.0)点击Apply。得到半圆弧2,如图6所示。
图10.坐标窗口7图11.坐标窗口8图12.半圆弧25、创建移动副1
Connectors>TranslationalJoint:选择创建移动副,在Construction中选择2Bodlies-1Location,其余设置不变。如图13所示。然后,用鼠标先选中圆弧1(Part2),再选中大地(Part1),最后,将移动副1的位置设在原点(0.0,0.0,0.0),水平向右为正。如图14所示。
图13.移动副1参数设置图14.创建移动副16、创建移动副2
Connectors>Joints>TranslationalJoint:选择创建移动副,在
Construction中选择2Bodlies-1Location,其余设置不变。如图15所
示。然后,用鼠标先选中矩形(Part3),再选中大地(Part1),最后,将移动副2的位置设在点(200.0,400.0,0.0),竖直向上为正。如图16所示。
图15.移动副2参数设置图16.创建移动副27、创建MARKER点
Bodies>Construction>Geometry:Marker>AddtoPart:先用鼠标选
中矩形(Part3),然后在点(200.0,350.0,0.0)位置处建立MARKER点22,如图18所示。
图17.创建MARKER点参数设置图18.创建MARKER点228、创建点线约束
Connectors>Special>Point-CurveConstraint:选择创建点线约束,
在MARKER点22附近点击右键,弹出如图19所示对话框,选择PART_3.MARKER_22,点击OK。再用鼠标选中PART_2.ARC_1,从
而创建了点线约束如图20所示。
图19.选择MARKER点22图20.创建点线约束9、施加驱动
Motions>JointMotions>TranslationalJointMotion:选择平移驱动,
用鼠标选择Joint_1,从而创建了平移驱动,然后点击MOTION_1,点击右键选择Modify,弹出图21所示对话框,设置函数类型为速度(velocity),在Function(time)中输入,50.0+5.0*time,点击OK,如图21所示。
图21.设置平移驱动四、求解过程Simulation>SimulationControl:设置动画仿真,在EndTime栏中
输入5.0s,设置步数为500,点击仿真开始按钮,观看动画。如图22所示。
图22.设置仿真待求解的物理量为连杆AB的速度和加速度,在半圆弧2附近点击右键,选中Marker:MARKER20,再点击右键,选择Measure,弹出如图23对话框,在Characteristic中选择Translationalvelocity,在Component中选择Y方向。其余设置不变,点击OK。弹出如图24所示对话框。
重复操作,如图25所示,在Characteristic中选择Translationalacceleration,在Component中选择Y方向。其余设置不变,点击OK。
弹出如图26所示对话框。图23.设置Translationalvelocity图24.Translationalvelocity曲线图25.设置Translationalacceleration图26.Translationalacceleration曲线五、结果后处理再次点击仿真开始按钮,观看并检验之前的结果。然后点击Results>Postprocessor,打开后处理窗口,添加两次测量的曲线,并加
载动画,如图27所示。图27.结果后处理六、理论力学解解:因为AB杆做平动,则连杆AB的速度和加速度与A点的速度和加速度相同。所以只需分析A点的速度和加速度。以连杆上A点为动点,凸轮为动系,分析得到绝对运动为直线平动,相对运动为圆周运动,牵连运动为直线平动。
(1)连杆AB的速度速度矢量分解图如图28所示:根据reavvv,且svve/mm50,
再根据图中几何关系可得到:
svve
a/mm8675.28
3
50
60tan
svve
r/mm735.57
23
50
60sin图28.速度分解图
故,连杆AB的速度为28.8675mm/s。(2)连杆AB的加速度加速度矢量分解图如图29所示:根据nrrereaaaaaaa
,且
2/mm5saae
,22/mm333.8sRvarnr。
将加速度矢量沿着nra方向投影,得到:nreaaaa
60cos30cos
图29.加速度分解图
,代入数据解得:2/mm7354.6saa
故,连杆AB的加速度为-6.7354mm/s2。七、误差分析ADAMS仿真结果,如图30、31所示,分别取初始时刻的速度
值与加速度值作为仿真结果。
图30.速度仿真值图31.加速度仿真值表1.连杆AB速度值与加速度值误差分析理论值计算值误差avs/mm8675.28s/92mm86.280.0059%
aa2/mm7354.6s2/294mm7.6s0.089%
由ADAMS软件仿真所得初始时刻的计算结果与理论计算值吻合,误差均小于1%,可作为该问题的解。