方位角问题

1.5三角函数的应用
第1课时方位角问题
基础题
知识点方位角问题
1.(河北中考)已知:岛P位于岛Q的正西方,由岛P,Q分别测得船R位于南偏东30°和南偏西45°方向上,符合条件的示意图是( )
2.(南充中考)如图,一艘海轮位于灯塔P的北偏东55°方向,距离灯
塔2海里的点A处,如果海轮沿正南方向航行到灯塔的正东方向,那
么海轮航行的距离AB长是( )
A.2海里B.2sin55°海里C.2cos55°海里D.2tan55°海里
3.如图,轮船从B处以每小时50海里的速度沿南偏东30°方向匀速航
行,在B处观测灯塔A位于南偏东75°方向上,轮船航行半小时到达C
处,在C处观测灯塔A位于北偏东60°方向上,则C处与灯塔A的距离是多少海
里( )A.253B.252C.50 D.25
4.如图,一轮船由南向北航行到O处时,发现与轮船相距40海里的A岛在北偏东
33°方向.已知A岛周围20海里水域有暗礁,如果不改变航向,
轮船____________(填“有”或“没有”)触礁的危险.(可使用科
学计算器)
5.(南宁中考)如图,一渔船由西往东航行,在A点测得海岛C位
于北偏东60°的方向,前进20海里到达B点,此时,测得海岛C位于北偏东30°的方向,则海岛C到航线AB的距离CD等于____________海里.
6.(资阳中考)如图,湖中的小岛上有一标志性建筑物,其底部为A,某人在岸边的B处测得A在B的北偏东30°的方向上,然后沿岸边直行4公里到达C处,再次测得A在C的北偏西45°的方向上(其中A、B、C在同一个平面上).求这个标志性建筑物的底部A到岸边BC的最短距离.
中档题
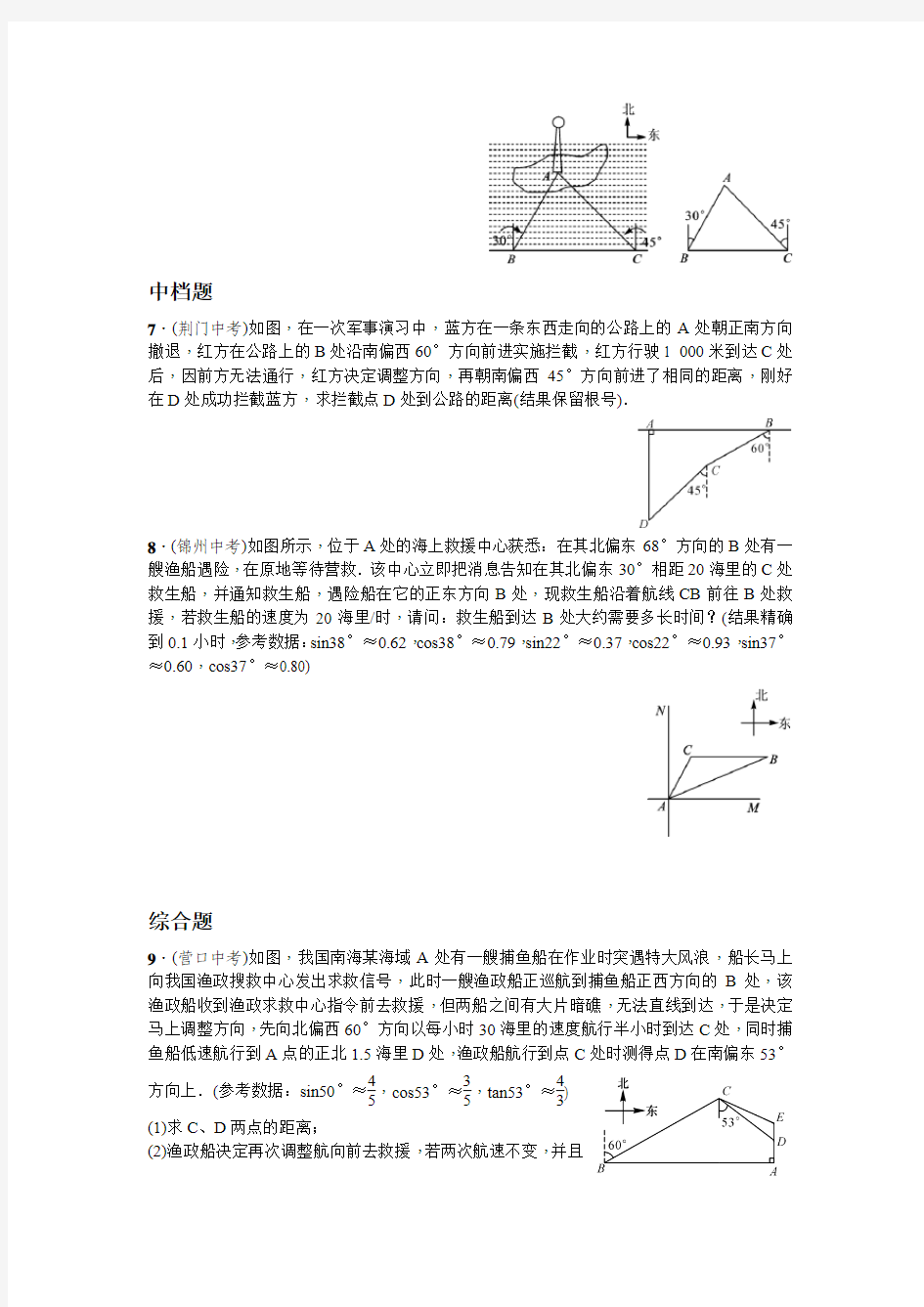
7.(荆门中考)如图,在一次军事演习中,蓝方在一条东西走向的公路上的A 处朝正南方向撤退,红方在公路上的B 处沿南偏西60°方向前进实施拦截,红方行驶1 000米到达C 处后,因前方无法通行,红方决定调整方向,再朝南偏西45°方向前进了相同的距离,刚好在D 处成功拦截蓝方,求拦截点D 处到公路的距离(结果保留根号).
8.(锦州中考)如图所示,位于A 处的海上救援中心获悉:在其北偏东68°方向的B 处有一艘渔船遇险,在原地等待营救.该中心立即把消息告知在其北偏东30°相距20海里的C 处救生船,并通知救生船,遇险船在它的正东方向B 处,现救生船沿着航线CB 前往B 处救援,若救生船的速度为20海里/时,请问:救生船到达B 处大约需要多长时间?(结果精确到0.1小时,参考数据:sin38°≈0.62,cos38°≈0.79,sin22°≈0.37,cos22°≈0.93,sin37°≈0.60,cos37°≈0.80)
综合题
9.(营口中考)如图,我国南海某海域A 处有一艘捕鱼船在作业时突遇特大风浪,船长马上向我国渔政搜救中心发出求救信号,此时一艘渔政船正巡航到捕鱼船正西方向的B 处,该渔政船收到渔政求救中心指令前去救援,但两船之间有大片暗礁,无法直线到达,于是决定马上调整方向,先向北偏西60°方向以每小时30海里的速度航行半小时到达C 处,同时捕鱼船低速航行到A 点的正北1.5海里D 处,渔政船航行到点C 处时测得点D 在南偏东53°
方向上.(参考数据:sin50°≈45,cos53°≈35,tan53°≈43
) (1)求C 、D 两点的距离;
(2)渔政船决定再次调整航向前去救援,若两次航速不变,并且
在点E处相会合,求∠ECD的正弦值.
方位角定义
方位角定义 方位角 科技名词定义 中文名称: 方位角 英文名称: azimuth 其他名称: 地平经度 定义: 地平坐标系的经向坐标,过天球上一点的地平经圈与子午圈所交的球面角所属学科:天文学(一级学科);天体测量学(二级学科) 本内容由全国科学技术名词审定委员会审定公布 目录[隐藏] 各种定义 方位角的种类 三种方位角之间的关系 坐标方位角的推算 天文学方位角定义: 圈 [编辑本段] 各种定义
方位角(azimuth): 在磁带录音机中指录放磁头和磁带行进方向之间的夹角,理 想时应为90?;在LP电唱盘中则指针臂同唱片表面之间的角度,理想时应为90?。 方位角: 是指卫星接收天线,在水平面做0?,360?旋转。方位角调整时抛物面在水平面做左右运动。 通常我们通过计算软件或在资料中得到的结果应该是以正南方向为标准,将卫星天线的指向偏东或偏西调整一个角度,该角度即是所谓的方位角。至于到底是偏东还是偏西,取决于接收地与欲接收卫星之间的经度关系,以我们所在的北半球为例,若接收地经度大于欲接收卫星经度,则方位角应向南偏西转过某个角度; 反之,则应向东转过某个角度。正南方向用指南针来测定,但是由于地理南极和地磁场南极并非完全重合,所以选好方位角之后还得做一些修正才有可能接收到最强的卫星信号。 方位角(azimuth angle): 从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角,方位角的取值范围为0~360度。[ 编辑本段] 方位角的种类由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。 (1) 真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。通常在精密测量中使用。 (2) 磁方位角。地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用A,表示。
方位角与象限角
直线定向 令狐采学 确定地面上两点之间的相对位置,除了需要测定两点之间的水平距离外,还需确定两点所连直线的方向。一条直线的方向,是根据某一标准方向来确定的。确定直线与标准方向之间的关系,称为直线定向。 一、标准方向 1.真子午线方向 通过地球表面某点的真子午线的切线方向,称为该点的真子午线方向。真子午线方向可用天文测量方法测定。 2.磁子午线方向 磁子午线方向是在地球磁场作用下,磁针在某点自由静止时其轴线所指的方向。磁子午线方向可用罗盘仪测定。 3.坐标纵轴方向
在高斯平面直角坐标系中,坐标纵轴线方向就是地面点所在投影带的中央子午线方向。在同一投影带内,各点的坐标纵轴线方向是彼此平行的。 二、方位角 测量工作中,常采用方位角表示直线的方向。从直线起点的标准方向北端起,顺时针方向量至该直线的水平夹角,称为该直线的方位角。方位角取值范围是0?~360?。因标准方向有真子午线方向、磁子午线方向和坐标纵轴方向之分,对应的方位角分别称为真方位角(用A表示)、磁方位角(用Am表示)和坐标方位角(用α表示)。 三、三种方位角之间的关系 因标准方向选择的不同,使得一条直线有不同的方位角,如图????所示。过点的真北方向与磁北方向之间的夹角称为磁偏角,用δ表示。过点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角,用γ表示。
δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。同一直线的三种方位角之间的关系为: (????); (????); (????) 四、坐标方位角的推算 .正、反坐标方位角 如图?? 所示,以A为起点、B为终点的直线AB的坐标方位角αΑB,称为直线AB的坐标方位角。而直线BA的坐标方位角αBA,称为直线AB的反坐标方位角。由图?? 中可以看出正、反坐标方位角间的关系为:
经纬度计算距离和方位角
经纬度计算距离和方位角 方位角(azimuthangle):从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。 (一)方位角的种类 由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线, 因此,从某点到某一目标,就有三种不同方位角。 (1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。通常在精密测量中使用。 (2)磁方位角。地球是一个大磁体,地球的磁极位置是不断变 化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地 形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。 由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用Am表示。 (3)坐标方位角。由坐标纵轴方向的北端起,顺时针量到直线 间的夹角,称为该直线的坐标方位角,常简称方位角,用a表示。 方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及 部队行进时等,都广泛使用。不同的方位角可以相互换算。 军事应用:为了计算方便精确,方位角的单位不用度,用密位作 单位。换算作:360度=6000密位。 (二)三种方位角之间的关系
因标准方向选择的不同,使得一条直线有不同的方位角。 同一直线的三种方位角之间的关系为: A=Am+δ A=a+γ a=Am+δ-γ (三)坐标方位角的推算 1.正、反坐标方位角 每条直线段都有两个端点,若直线段从起点1到终点2为直线的前进方向,则在起点1处的坐标方位角a12称为直线12的正方位角,在终点2处的坐标方位角a21称为直线12的反方位角。 a反=a正±180° 式中,当a正<180°时,上式用加180°;当a正>180°时,上式用减180°。 2.坐标方位角的推算 实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。因β2在推算路线前进方向的右侧,该转折角称为右角;β3在推算路线前进方向的左侧,该转折角称为左角。从而可归纳出推算坐标方位角的一 般公式为: a前=a后+180°+β左 a前=a后+180°-β右 如果计算的结果大于360?,应减去360°,为负值,则加上360?。
方位角与象限角
直线定向 确定地面上两点之间的相对位置,除了需要测定两点之间的水平距离外,还需确定两点所连直线的方向。一条直线的方向,是根据某一标准方向来确定的。确定直线与标准方向之间的关系,称为直线定向。 一、标准方向 1.真子午线方向 通过地球表面某点的真子午线的切线方向,称为该点的真子午线方向。真子午线方向可用天文测量方法测定。 2.磁子午线方向 磁子午线方向是在地球磁场作用下,磁针在某点自由静止时其轴线所指的方向。磁子午线方向可用罗盘仪测定。 3.坐标纵轴方向 在高斯平面直角坐标系中,坐标纵轴线方向就是地面点所在投影带的中央子午线方向。在同一投影带内,各点的坐标纵轴线方向是彼此平行的。 二、方位角 测量工作中,常采用方位角表示直线的方向。从直线起点的标准方向北端起,顺时针方向量至该直线的水平夹角,称为该直线的方位角。方位角取值范围是0?~360?。因标准方向有真子午线方向、磁子午线方向和坐标纵轴方向之分,对应的方位角分别称为真方位角(用A表示)、磁方位角(用A m表示)和坐标方位角(用α表示)。 三、三种方位角之间的关系
因标准方向选择的不同,使得一条直线有不同的方位角,如图4-19所示。过1点的真北方向与磁北方向之间的夹角称为磁偏角,用δ表示。过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角,用γ表示。 δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。同一直线的三种方位角之间的关系为: (4-14); (4-15); (4-16) 四、坐标方位角的推算 1.正、反坐标方位角
方位角与方向角
方位角与方向角 1.方向角:指北或指南方向线与目标方向所成的小于90°的角叫做方向角.如北偏东60°,南偏东30°,北偏西70°.特别地,若目标方向线与指北或指南的方向线成45°的角,如西南方向. 2.方位角:从某点的指北方向线按顺时针转到目标方向的水平角,叫做方位角。取值范围为0到360度比如正东方向就是方位角为90度,正西方向就方位角为270度。 懂了吗?呵呵!! 抬头时目光与水平面的夹角叫做仰视角 低头时目光与水平面的夹角叫做俯视角 方位角的表示方法是什么? (1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。 由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。通常在精密测量中使用。 (2)磁方位角。地球是一个大磁体,地球的磁极位置是不断变化的 真方位角,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用Am表示。 (3)坐标方位角。由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a表示。 真方位角(T rue bearing) 所有角度以正北方设为000°,顺时针转一圈后的角度为360°。 因此: 正北方:000°或360° 正东方:090° 正南方:180° 正西方:270° 罗盘方位角(Compass bearing) 正北和正南作首要方位,正东和正西为次要方位,在两者之间加 方位角的具体用法上角度。因此角度只会由0°至90°。因此: 正北方:N0°W 或N0°E 正东方:N90°E 或S90°E 正南方:S0°W 或S0°E 正西方:N90°W 或S90°W 假若两者加上与目标的距离,就会成为极坐标:直角坐标系(笛卡尔坐标系)以外的另一种坐标系统。 1、按给定的坐标数据计算方位角αBA、αBP ΔxBA=xA-xB=+123.461m ΔyBA=yA-yB=+91.508m 由于ΔxBA>0,ΔyBA>0 可知αBA位于第Ⅰ象限,即
方位角计算
因标准方向选择的不同,使得一条直线有不同的方位角,如图4-19所示。过1点的真北方向与磁北方向之间的夹角称为磁偏角,用δ表示。过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角,用γ表示。 δ和γ的符号规定相同:当磁北方向或坐标纵轴北方 向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。同一直线的三种方位角之间的关系为: (4-14); (4-15); (4-16) 四、坐标方位角的推算 1.正、反坐标方位角 2 图4-19 三种方位角之间的关系
如图4-20所示,以A 为起点、B 为终点的直线AB 的坐标方位角αΑB ,称为直线AB 的坐标方位角。而直线BA 的坐标方位角αBA ,称为直线AB 的反坐标方位角。由图4-20中可以看出正、反坐标方位角间的关系为: (4-17) 2.坐标方位角的推算 在实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。如图4-21所示,已知直线12的坐标方位角α12,观测了水平角β2和β3,要求推算直线23和直线34的坐标方位角。 O y 图4-20 正、反坐标方位角
由图4-21可以看出: 因β2在推算路线前进方向的右侧,该转折角称为右角; β3在左侧,称为左角。从而可归纳出推算坐标方位角的一 般公式为: (4-18) (4-19) 计算中,如果α前>360?,应自动减去360°;如果α 前 <0?,则自动加上360?。 1 3 4 图4-21 坐标方位角的推算
方位角计算
第三节 导线测量的内业 计算 导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。 计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。 一、坐标计算的基本公式 1.坐标正算 根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。如图6-10 所示, y 图6-10 坐标增量计算
已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。 直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。由图6-10可看出坐标增量的计算公式为: ?? ? =-=?=-=?AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1) 根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。坐标增量正、负号的规律如表6-5所示。 表6-5 坐标增量正、负号的规律 则B 点坐标的计算公式为: ?? ? +=?+=+=?+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos (6-2) 例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''?==AB AB D α,,若A 点的坐标为
m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。 解 根据式(6-2)得 6 .792456380sin m 62.135m 82.658sin 6.457456380cos m 62.135m 56.435cos ='''??+=+=='''??+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算 根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。如图6-10所示,已知直线AB 两端点的坐标分别为(x A ,y A )和(x B ,y B ),则直线边长D AB 和坐标方位角αAB 的计算公式为: 2 2AB AB AB y x D ?+?= (6-3) AB AB AB x y ??=arctan α (6-4) 应该注意的是坐标方位角的角值范围在0?~360?间,而arctan 函数的角值范围在-90?~+90?间,两者是不一致的。按式(6-4)计算坐标方位角时,计算出的是象限角,因此,应根据坐标增量Δx 、Δy 的正、负号,按表6-5决定其所在象限,再把象限角换算成相应的坐标方位角。 例6-2 已知A 、B 两点的坐标分别为 m 72.525m 50.304m 29.814m 99.342====B B A A y x y x ,,,试计算AB 的边长及坐标方位角。 解 计算A 、B 两点的坐标增量 m 57.288m 29.814m 72.525m 49.38m 99.342m 50.304-=-=-=?-=-=-=?A B AB A B AB y y y x x x 根据式(6-3)和式(6-4)得 m 13.291m)57.288(m)49.38(2 222=-+-=?+?=AB AB AB y x D
方位角的计算方法
方位角的计算方法:(已知方位角+水平角大于540°-540°)已知方位角+水平角±180°=方位角 坐标增量的计算方法: 平距×COS方位角=△X坐标增量 平距×Sin方位角=△Y坐标增量 坐标的计算方法: 已知X坐标±△X坐标增量=X坐标 已知Y坐标±△Y坐标增量=Y坐标 高差、平距的计算方法: 斜距×Sin倾角=高差 斜距×COS倾角=平距 高差÷Sin倾角=斜距 平距÷cos已知度分秒=斜距 高程的计算方法: 已知高程-仪器高+前视高±高差=该点的顶板高差 原始记录计算方法: 前视-后视相加÷2=水平角(前视不够-后视的+360°再减)后视 00°00′00″ 180°00′09″
前视92°49′02″272°49′13″水平角= 92°49′03″ 实测倾角:正镜-270°倒镜-90°(正、倒镜相加-360°)实例: 110°30′38″-90°= 00°30′38″ 实例: 270°30′38″-270°= 00°30′38″ 激光的计算方法:两点的高程相减: 比如:5点高程1479、479-4点高程1471、052 = 8、427 两点之间的平距:60、673×tan7°19′25″=7、798 8、427-7、797=0、629(上山前面的点一定高于后面的点,所以前面的点减后面的点) 测量:1、先测后视水平角:归零,倒镜180°不能误差15′ 2、前视:先测水平角并读数记录,然后倒镜测倾角,水平角、平距、斜距、高差、量出仪器高,前视量出前视高。 要求方位角-已知方位角±180°=拨角方位 画两千的图:展点用0.6正好. 倾角的计算方法:180°以下的-90° 270°-超过180°的 两点的高差除平距按tan=倾角
三种方位角之间的关系
【方位角(azimuthangle)】从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。 (一)方位角的种类由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。 (1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。通常在精密测量中使用。 (2)磁方位角。地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用A m表示。 (3)坐标方位角。由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。方位角在测绘、地质与地 球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。不同的方位 角可以相互换算。军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。换算作:360度=6000密位。 【三种方位角之间的关系】 因标准方向选择的不同,使得同一条直线有三种不同的方位角,三种方位角 之间的关系如图4-19所示。 A12 为真方位角,A m12为磁方位角,α12为坐标方位角。 过1点的真北方向与磁北方向之间的夹角称为磁偏角(δ),过1点的真北方 向与坐标纵轴北方向之间的夹角称为子午线收敛角(γ)。 真方位角A12=磁方位角A m12+磁偏角δ=坐标方位角α12+子午线收敛角γ α12=A m12+δ-γ(1) A12=A m12+δ(2) A12=α12+γ(3) (4) δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。 同一直线的三种方位角之间的关系为(注意在计算时带上δ和γ的符号): 坐标方位角和大地方位角的关系示意图
方位角计算公式
一、直线定向1、正、反方位角换算对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角 是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同 一条直线的正、反方位角相差,即同一直线的正反方位角= (1-13> 上式右 端,若<,用“+”号,若,用“-”号。 2、象限角与方位角的换算 一条直线的方向有时也可用象限角表示。所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值围为。为了说明直线所在的象限,在前应加注直线所在象限的名称。四个象限的名称分别为北东 设三点相关位置如图1-17(>所示,应有 =++ (1-14> 设三点相关位置如图1-17(>所示,应有 =++-=+- (1-15> 若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式: =+(1-16> 显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式=- (1-17> 上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。 方位角(azimuthangle):从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。 (一)方位角的种类 由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。 (1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。通常在精密测量中使用。 (2)磁方位角。地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用Am表示。 (3)坐标方位角。由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a表示。 方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。不同的方位角可以相互换算。 军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。换算作:360度=6000密位。 (二)三种方位角之间的关系 因标准方向选择的不同,使得一条直线有不同的方位角。 同一直线的三种方位角之间的关系为: A=Am+δ A=a+γ a=Am+δ-γ (三)坐标方位角的推算 1.正、反坐标方位角 每条直线段都有两个端点,若直线段从起点1到终点2为直线的前进方向,则在起点1处的坐标方位角a12称为直线12的正方位角,在终点2处的坐标方位角a21称为直线12的反方位角。 a反=a正±180° 式中,当a正<180°时,上式用加180°;当a正>180°时,上式用减180°。 2.坐标方位角的推算 实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。因β2在推算路线前进方向的右侧,该转折角称为右角;β3在推算路线前进方向的左侧,该转折角称为左角。从而可归纳出推算坐标方位角的一般公式为: a前=a后+180°+β左 a前=a后+180°-β右 如果计算的结果大于360?,应减去360°,为负值,则加上360?。 天文学方位角定义: 在地平坐标系中,通过南点、北点的地平经圈称子午圈。子午圈 4.3.3 角的比较和运算(二) 教学目标 一、知识与能力 能正确运用角度表示方向,并能熟练运算和角有关的问题 二、过程与方法 能通过实际操作,体会方位角在是实际生活中的应用,培养学生的抽象思维. 三、情感、态度、价值观 能积极参与数学学习活动,培养学生对数学的好奇心和求知欲 教学重难点 重点:方位角的表示方法 难点:方位角的准确表示 教学过程 一、情景导入 1.海上,缉私艇发现离它500海里处停着一艘可疑船只(如图),立即赶往检查.现请你确定缉私艇的航线,画出示意图.并用语言描述出来. A·可疑船 B·缉私艇 2.实生活中,有一种角经常用于航空、航海,测绘中领航员常用地图和罗盘进行这种角的测定,这就是方位角,方位角应用比较广泛,现什么是方位角呢? 二、学习新知 方位角其实就是表示方向的角,这种角以正北,正南方向为基准描述物体的方向,如“北偏东300”,“南偏西400”等,方位角不能以正东,正西为基准,如不能说成“东偏北600,西偏南500”等,但有时如北偏东450时,我们可以说成东北方向. 三、实践与应用 例1 如图:指出图中射线OA、OB所表示的方向. 例2 若灯塔位于船的北偏东300,那么船在灯塔的什么方位? (要让学生画出相应图形,结合图形来回答) (换成其它的方位角再回答然后找到规律) 例3 如图,货轮O在航行过程中发现灯塔A在它的南偏东600的方向上,同时在它北偏东600,南偏西100,西北方向上又分别发现了客轮B,货轮C和海岛D,仿照表示灯塔方位的方法,画出表示客轮B、货轮C、海岛D方向的射线. (教师分析,一学生上黑板,学生点评) 四、小结 这节课你学到了什么?还有什么想法吗? 五、参考练习:1.请使用量角器、刻度尺画出下列点的位置. (1)点A在点O的北偏东300的方向上,离点O的距离为3cm. (2)点B在点O的南偏西600的方向上,离点O的距离为4cm. (3)点C在点O的西北方向上,同时在点B的正北方向上. 年级:九年级下册科目:数学主备: 审核: 课题:28.2 方位角与方向角问题 学习目标: 能综合运用直角三角形的勾股定理与边角关系解决简单的实际问题. 重点与难点 1.重点:直角三角形的解法. 2.难点:三角函数在解直角三角形中的灵活运用。 一、用一用 用解直角三角形知识解决测量中的方位角问题. 方位角与方向角 1.方向角 指北或指南方向线与目标方向所成的小于90°的角叫做方向角.如图(1)中的目标方向线OA,OB,OC分别表示北偏东60°,南偏东30°,北偏西70°.特别地,若目标方向线与指北或指南的方向线成45°的角,如图(1)的目标方向线OD与正南方向成45°角,通常称为西南方向. (1)(2) 2.方位角 从某点的指北方向线按顺时针转到目标方向的水平角,叫做方位角.?如图(2)中,目标方向线PA,PB,PC的方位角分别是40°,135°,225°. 用解直角三角形的方法解决实际问题方法要点 在解决实际问题时,我们要学会将千变万化的实际问题转化为数学问题,要善于将某些实际问题中的数量关系归结为直角三角形中的元素(边、角)?之间的关系,这样才能很好地运用解直角三角形的方法求解. 解题时一般有以下三个步骤: 1.审题.按题意画出正确的平面或截面示意图,并通过图形弄清已知和未知. 2.将已知条件转化为示意图中的边、角或它们之间的关系,把实际问题转化为解直角三角形的问题.如果没有现成是直角三角形可供使用,可通过作辅助线产生直角三角形,再把条件和问题转化到这个直角三角形. 3.根据直角三角形(或通过作垂线构造直角三角形)元素(边、?角)之间关系解有关的直角三角形. 例1、如图所示,一艘海轮位于灯塔P的北偏东65°方向,?距离灯塔80海里的A处,它沿正南方向航行一段时间后,?到达位于灯塔P的南偏东34°方向上的B处.这时,海轮所在的B处距离灯塔P有多远?(精确到0.01海里) 分析:因为△APB不是一个直角三角形,所以我们把一个三角形分解为两个直角三角形,△ACP与△PCB.PC?是东西走向的一条直线.AB是南北走向的一直线,所以AB与PC是相互垂直的,即∠ACP与∠BDP?均为直角.再通过65度角与∠APC互余的关系求∠APC;通过34度角与∠BPC?互余的关系求∠BPC. 解:如图,在Rt△APC中, ∵ cos(90°-65°)=___________________ ∴ PC=_____________________________ = 在Rt△BPC中,∠B=34°, ∵sinB=__________________, ∴PB=____________________________________≈_______ 因此,当海轮到达位于灯塔P的南偏东34°方向时,它距离灯塔P大约130.23海里. 方位角:从标准方向的北端起,顺时针方向到直线的水平角称为该直线的方位角。方位角的取值范围为0°~360°。方位角(azimuth):在磁带录音机中指录放磁头和磁带行进方向之间的夹角,理想时应为90°;在LP电唱盘中则指针臂同唱片表面之间的角度。方位角:是指卫星接收天线,在水平面做0°-360°旋转。方位角调整时抛物面在水平面做左右运动。通常我们通过计算软件或在资料中得到的结果应该是以正南方向为标准,将卫星天线的指向偏东或偏西调整一个角度,该角度即是所谓的方位角。至于到底是偏东还是偏西,取决于接收地与欲接收卫星之间的经度关系,以我们所在的北半球为例,若接收地经度大于欲接收卫星经度,则方位角应向南偏西转过某个角度;反之,则应向东转过某个角度。正南方向用指南针来测定,但是由于地理南极和地磁场南极并非完全重合,所以选好方位角之后还得做一些修正才有可能接收到最强的卫星信号。方位角(azimuthangle):指的是由子午线的北端顺时针方向量到测线上的夹角。以真子午线为准者称“真方位角”;以磁子午线为准者称“磁方位角”。坐标方位角:从某点的坐标纵线北起,依顺时针方向到目标方向钱间的水平夹角,叫该点的坐标方位角。方位角:从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。(1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。从某点的真北方向钱起,依顺时针方向到目标方向钱间的水手夹角,叫该点的真方位角。通常在精密测量中使用。(2)地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。从某点的磁北方向线起,依顺时针方向到目标方向线间的水平夹角,叫该点的磁方位角。(3)坐标方位角。从某点的坐标纵线北起,依顺时针方向到目标方向钱间的水平夹角,叫该点的坐标方位角。方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。不同的方位角可以相互换算。 三、三种方位角之间的关系 因标准方向选择的不同,使得一条直线有不同的方位角,如图4-19所示。过1点的真北方向与磁北方向之间的夹角称为磁偏角,用δ表示。过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角,用γ表示。 δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。同一直线的三种方位角之间的关系为: δ+=m A A (4-14); γα+=A (4-15); γδα-+=M A (4-16) 四、坐标方位角的推算 1.正、反坐标方位角 2 图4-19 三种方位角之间的关系 如图4-20所示,以A 为起点、B 为终点的直线AB 的坐标方位角αΑB ,称为直线AB 的坐标方位角。而直线BA 的坐标方位角αBA ,称为直线AB 的反坐标方位角。由图4-20中可以看出正、反坐标方位角间的关系为: ?±=180BA AB αα (4-17) 2.坐标方位角的推算 在实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。如图4-21所示,已知直线12的坐标方位角α12,观测了水平角β2和β3,要求推算直线23和直线34的坐标方位角。 y 图4-20 正、反坐标方位角 由图4-21可以看出: 21222123180βαβαα-?+=-= 32333234180βαβαα+?+=+= 因β2在推算路线前进方向的右侧,该转折角称为右角;β3在左侧,称为左角。从而可归纳出推算坐标方位角的一般公式为: 左后前βαα+?+=180 (4-18) 右后前βαα-?+=180 (4-19) 计算中,如果α前>360?,应自动减去360°;如果α前 <0?,则自动加上360?。 五、象限角 1 3 4 图4-21 坐标方位角的推算 【方位角(azimuthangle)】从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。 (一)方位角的种类由于每点都有真北、磁北与坐标纵线北三种不同的指北方 向线,因此,从某点到某一目标,就有三种不同方位角。 (1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一 般用A表示。通常在精密测量中使用。 (2)磁方位角。地球就是一个大磁体,地球的磁极位置就是不断变化的,某点指向磁北极的方向线叫磁北方向线也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用A m表示。 (3)坐标方位角。由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a表示。方位角在测绘、地质与地球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。不同的方位角可以相互换算。军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。换算作:360度=6000密位。 【三种方位角之间的关系】 因标准方向选择的不同,使得同一条直线有三种不同的方位角,三种方位角之间的关系如图4-19所示。 A 12为真方位角,A m12为磁方位角,a 12为坐标方位角。 过1点的真北方向与磁北方向之间的夹角称为磁偏角(S ),过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角(丫)。 a 12+子午线收敛角丫 真方位角A 12 =磁方位角A m12 +磁偏角3=坐标方位角 a 12= A m12 +3 — Y (1) A 12= A m12+3 ⑵ A 12= a 12+ 丫⑶ 好门—…'1 心-X]⑷ 3与丫的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,3与丫的符号为“ + ” ;当磁北方向或坐标纵轴北方向在真北方向西侧时,3与丫的符号为“一”。 同一直线的三种方位角之间的关系为(注意在计算时带上3与丫的符号): 坐标方位角与大地方位角的关系示意图 上式中:丫为平面子午线收敛角,当站点在中央子午线西侧时丫为负,在东侧时为正;3为 建筑学测量学复习资料 一、测定和测设的区别 测定是指使用测量仪器和工具,通过测量和计算,得到一系列测量数据,或把地球表面的地形缩绘成地形图,其实质就是地面——图纸 测设是指把图纸上规划好的建筑物、构筑物的位置在地面上标定出来,作为施工的依据。其实质是图纸——地面 点的绝对高程、相对高程 地面点到大地水准面的铅垂距离,称为该点的绝对高程,或称海拔。地面点到假设水准面的垂直距离,称为该点的相对高程。两点高程之差称为高差。 测量的三大工作 测高程、测角和量距 确定地面两个点之间的相互关系需要的要素 水平角、距离、高差 测量工作的基本原则和作用:1、从整体到局部,先控制后碎部。作用:它可以减少误差积累,保证测绘精度,而且可以分幅测绘,加快测绘速度。2、前一不工作未做审核不得进行下一步。作用:它可以防止错漏发生,保证测量结果的正确性。 一、水准测量的原理 水准测量时利用一条水平视线,并借助水准尺,来测定地面两点之间的高差,这样就可以由已知点的高程推算出未知点的高程。 高程的计算方法 高差法、仪高法 工具的使用 P12、P15 何为视差?视差产生的原因?如何消除视差 当眼睛在目镜端上下微微移动时,若发现十字丝与目标影像有相对运动,这种现象称为视差。产生视差的原因是目标成像的平面和十字丝的平面不重合。 消除的方法是重新仔细的进行物镜对光,直到眼睛上下移动,读数不变为止。 表2—1正确填写记录表格 P17 水准路线的布设形式 附合水准路线、闭合水准路线、支水准路线 表2—3计算方法、步骤 P21 闭合差的调整、计算、原则 P21—P22 二、什么是水平角 地面上某点到两目标的方向线铅垂投影在水平面上的构成的角度,称为水平角 水平角的观测(仪器的关键部件) P31—P36 P37 什么是对中整平;对中、整平的目的 对中的作用是使水平度盘中心与测站点(水平角的顶点)位于同一铅垂线上。整平的作用是使水平度盘水平、竖轴竖直 水平角的观测方法:1、测回法2、方向观测 测回法用于观测两个方向之间的单角;方向观测法适用于两个以上的方向。 第2课时与方位角有关的解直角三角形应用题 基础题 知识点与方位角有关的应用问题 1.如图,小雅家(图中点O处)门前有一条东西走向的公路,经测得有一水塔(图中点A处)在距她家北偏东60°方向的500米处,那么水塔所在的位置到公路的距离AB是( ) A.250米B.2503米 C.500 3 3米D.5002米 第1题图第2题图第3题图 2.(2019·长沙)如图,一艘轮船从位于灯塔C的北偏东60°方向,距离灯塔60 n mile的小岛A出发,沿正南方向航行一段时间后,到达位于灯塔C的南偏东45°方向上的B处,这时轮船B与小岛A的距离是( ) A.30 3 n mile B.60 n mile C.120 n mile D.(30+303)n mile 3.如图,某人从O点沿北偏东30°的方向走了20米到达A点,B在O点的正东方,且在A 的正南方,则此时AB间的距离是米.(结果保留根号) 4.(2019·黄石)如图,一轮船在M处观测灯塔P位于南偏西30°方向, 该轮船沿正南方向以15海里/小时的速度匀速航行2小时后到达N处, 再观测灯塔P位于南偏西60°方向.若该轮船继续向南航行至离灯塔P 最近的位置T处,此时轮船与灯塔之间的距离PT为海里(结 果保留根号). 中档题 5.(2019·泰安)如图,一艘船由A港沿北偏东65°方向航行30 2 km 至B港,然后再沿北偏西40°方向航行至C港,C港在A港北偏东20° 方向,则A,C两港之间的距离为 ( ) A.(30+303)km B.(30+103)km C.(10+303)km D.30 3 km 6.(2017.泸州)如图,海中一渔船在A处且与小岛C相距70nmile,若该渔船由西向东航行30nmile到达B处,此时测得小岛C位于B的北偏东30°方向上;求该渔船此时与小岛C之间的距离. 第2课时与方位角、坡角有关的运用举例 1.上午9时,一条船从A处出发,以每小时40海里的速度向正东方向航行,9时30分到达B处,如图,从A,B两处分别测得小岛M在北偏东45°和北偏东15°方向,那么B处船与小岛M的距离为(B) (A)20海里(B)20海里 (C)15海里(D)20海里 2.说出下列各角的方位. $ ∠NOA是北偏东55°,? ∠BOS是南偏东30°,? ∠COS是南偏西35°,? ∠NOD是西北方向.? 3.某人沿着坡度为1∶的山坡向上走50 m,这时他离水平地面 25m.? 4.在倾斜角为30°的斜坡上植树,若要求两棵树的水平距离为6 m,则斜坡上相邻两树的坡面距离为4m.? ! 5.一船上午9点位于灯塔A的东北方向,在与灯塔A相距64海里的B 港出发,向正西航行,到10时30分时恰好在灯塔的正北的C处,则此船 的速度为海里/时.? 6.如图所示,某工程队准备在山坡(山坡视为直线l)上修一条路,需要测量山坡的坡度,即tan α的值.测量员在山坡P处(不计此人身高)观察对面山顶上的一座铁塔,测得塔尖C的仰角为37°,塔底B的仰角为°.已知塔高BC=80米,塔所在的山高OB=220米,OA=200米,图中的点O,B,C,A,P在同一平面内,求山坡的坡度.(参考数据 sin °≈,tan °≈,sin 37°≈,tan 37° ≈ 解:如图,过点P作PD⊥OC于D,PE⊥OA于E,则四边形ODPE为矩形.在Rt△PBD中,∵∠BDP=90°,∠BPD=°, ∴BD=PD·tan∠BPD=PD·tan °; ~ 在Rt△CPD中,∵∠CDP=90°,∠CPD=37°, ∴CD=PD·tan∠CPD=PD·tan 37°; ∵CD-BD=BC, ∴PD·tan 37°-PD·tan °=80, 1、在掌握测量学概念的基础上,掌握普通测量学/工程测量学的基本原则、任务、研究对象、实质; 2、在熟练掌握绝对高程、相对高程、高斯投影投影条件和变形规律的基础之上,掌握水平面代替水准面的限度,及其与高斯平面直角坐标系、地方坐标系之间的关系; 3、掌握角度测量仪器(光学经纬仪)的基本构造,角度测量的基本原理,水平角(测回法测水平角、方向观测法测水平角)和竖直角(也叫高度角,垂直角)的测角原理,外业、内业计算;掌握测回法测角在水平角和竖直角测量中对哪些误差有影响; 4、掌握距离测量原理和方法,掌握测距仪标称经度的涵义;在掌握直线定向的基本原理的基础上,掌握三种方位角的定义以及方位角和象限角之间的关系,知道天顶距的概念;相对误差的概念及应用;掌握方位角正反角的概念和对应的计算,掌握由水平角传递的各导线边方位角(可以计算方位角闭合差的,要掌握方位角闭合差的分配)计算(属于计算题的常考点); 5、掌握高程测量的基本原理,尤其是水准测量的基本原理,理解前视读数、后视读数、高差、视线高、仪器高等相关概念,相关仪器、工具,以及对应的外业实施和内业处理(属于计算题的常考点);该章涉及的小知识点较多,要灵活掌握、融会贯通,要理解双面尺法和两次仪器高法测高差的基本原理及相关计算; 6、结合前面三章的三个基本观测量(角度、水平距离和高差)分析系统误差、偶然误差的基本概念,了解观测条件的概念;掌握偶然误差的基本特性、衡量测量数据经度的相关指标,误差传播的特点; 7、掌握控制测量基本概念、分类以及导线的相关外业、内业;掌握坐标正算和坐标反算; 8、掌握地形图的基本知识,比例尺经度的相关概念及应用,等高线表示地貌的基本原理,等高线的特性,高差、平距及坡度的基本概念及其应用,掌握地形图应用的基本知识。 一、直线定向 1、正、反方位角换算 对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角 = (1-13) 上式右端,若< ,用“+”号,若,用“-”号。 2、象限角与方位角的换算 一条直线的方向有时也可用象限角表示。所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角, 用表示, 取值范围为。为了说明直线所在的象限, 在前应加注直线所在象限的名称。四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。象限角和坐标方位角之间的换算公式列于表1-4。 表1-4 象限角与方位角关系表 象限角与方位角换算公式 = =- =+ =- 3、坐标方位角的推算 测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。 设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。 设三点相关位置如图1-17()所示,应有 =++ (1-14) 设三点相关位置如图1-17()所示,应有 =++-=+- (1-15) 若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式: =+(1-16) 显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式 =- (1-17) 上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。方位角
(人教版初中数学)方位角
方向角与方位角问题
方位角定义
方位角计算
三种方位角之间的关系
测量学
第2课时 与方位角有关的解直角三角形应用题
第2课时-与方位角、坡角有关的运用举例
测量学D复习知识点
方位角计算公式