陆基增强_双星定位组合系统_郝燕玲
惯性导航与卫星导航组合定位精度分析及仿真

惯性导航与卫星导航组合定位精度分析及仿真周俊;王琳;徐永强;黄海;李枭楠【摘要】随着导航领域的逐渐发展,卫星导航的应用成为重要课题.阐述了惯性导航、卫星导航及其组合导航系统的基本原理和优缺点,对惯性导航系统的定位精度进行分析及仿真验证,并给出分析和验证的过程及结果.对惯性导航与卫星导航松组合模式的定位精度进行了分析和测试,并给出所使用的Kalman滤波器的详细参数及测试结果.测试结果表明,组合后的定位精度比单INS定位精度有大幅提高,且误差不随时间发散.【期刊名称】《无线电工程》【年(卷),期】2018(048)012【总页数】5页(P1086-1090)【关键词】卫星导航;惯性导航;组合导航;Kalman滤波【作者】周俊;王琳;徐永强;黄海;李枭楠【作者单位】陆军航空兵学院陆军航空兵研究所, 北京 101121;陆军航空兵学院陆军航空兵研究所, 北京 101121;陆军航空兵学院陆军航空兵研究所, 北京101121;陆军航空兵学院陆军航空兵研究所, 北京 101121;中国电子科技集团公司第五十四研究所, 河北石家庄 050081【正文语种】中文【中图分类】TP30 引言惯性导航系统(INS)是依据牛顿惯性原理,利用陀螺、加速度计等惯性敏感元件及初始信息来计算载体的姿态、速度和位置[1-2]。
惯性导航完全依靠载体自身设备独立自主地进行导航,是一种保密性好且不易受干扰的导航系统[3-4]。
但由于惯性器件存在测量误差,这种误差进入导航解算时会随时间累积,导致导航结果的误差随时间发散[5]。
全球卫星导航系统(GNSS)是一种星基无线电导航系统,能为全球陆、海、空、天的各类军民载体提供全天候、全天时和高精度的三维位置、速度和精密时间信息[6-8]。
但由于用户接收机在接收其导航定位信号时容易受到遮挡、折射和高动态等因素的干扰,导致信号质量不稳定,进而影响定位精度,甚至失锁[9-10]。
而INS与GNSS的组合能够有效地解决惯导误差随时间发散的问题,同时可以增强GNSS接收机对信号的捕获与跟踪性能,提高导航系统的稳定性[11-13]。
2011年国家自然基金获得者名录——国防科学技术大学
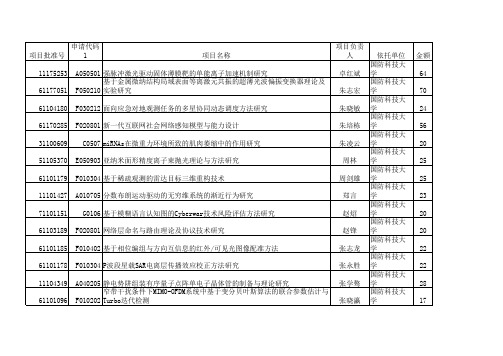
F020808 F020809 F020705 F020601 F010202 F010907 F020208 F010304 A040403 E020401 A040204 E050402 E050401 F030301 F010408 F020302 F020701 F040407 A011701 F020503 F050804 E051002 F020502 F010304 F020301 A040204 E051202 F010602 F050304 F010408
ห้องสมุดไป่ตู้
金额 64 70 24 56 20 25 25 23 20 20 22 22 28 17 58 25 20 23 56 24 22 26 56 28 23 25 23 24 48
61170287 11172326 61170048 61170286 61120106005 11102229 71102004 51105369 11172322 61171019 61171016 61170049 11172329 51175500 61171017 51105365 61175015 61170083 71101150 31171266 61174002 61174206 11172327 11104350 11172324 11173068 11174369 61170045 51173202 61108089
F020805 A020403 F020203 F020805 F0203 A020207 G0214 E050601 A020205 F010502 F010602 F020305 A020602 E050201 F010505 E050202 F030403 F0203 G0104 C060702 F030301 F030301 A020413 A040302 A020401 A030802 A040406 F0203 E030301 F0513
北斗国际搜救服务应用展望

图1 COSPAS-SARSAT返向链路服务工作流程
1982年COSPAS-SARSAT在加拿大支撑首次救援行动以来,COSPAS-SARSAT已在全球EPIRB和ELT遇险示位标,但在个人尚未应用。
(a)北京MEOLUT站 (b)CNMCC
图4 北斗国际搜救系统地面段
图5 支持北斗返向链路服务的信标(c)北斗返向链路信息处理系统BDS RLSP
3.用户段
中国在海事、渔业、民航等领域装备了EPIRB、ELT,但个人遇险领域PLB尚未在中国开通,目前,支持北斗返向链路服务的第二代信标样机(图5)已完成研制,信标符合《COSPAS-SARSAT 406 MHz遇险信标规范 C/S T.001》及《第
五、北斗搜救载荷国际入网运行
COSPAS-SARSAT实现入网
COSPAS-SARSAT要求,完成中国与
四个协约国(美国、俄罗斯、法国、加拿大)签署政府间意向声明,承诺为国际搜救卫星系统提供空间设备,并提供运行必要的技术和资源保障。
在此基础上,还需完成6颗北斗搜救载荷参数修订,进入国际搜救卫星系统
T系列等标准,作为国际入网启用的政策和技术依据(表1)。
目前,北斗系统
用测试工作已全面完成,待我国同四个协约国签署政府意向声明后,正式进入
和管理审批程序。
北斗搜救载荷国际入网手续办理后,还需持COSPAS-SARSAR系统T、A、G、P等持续提供北斗中轨搜救服务,推动北斗国际搜救系统全面纳入全球中轨搜救系统空间段、。
BDS/GPS 组合 RTK 定位性能分析

BDS/GPS 组合 RTK 定位性能分析满小三;孙付平;潘国富;丁赫;刘帅;吴帅【摘要】针对单系统RTK存在可见卫星数少等问题,文中研究BDS/GPS站间单差的RTK算法模型,该模型采用二次型函数部分最小化及LAMBDA方法联合搜索模糊度。
利用该模型分析BDS/GPS组合RTK的定位性能,通过短基线实测数据分析表明:站间单差RTK模型与双差模型是等价的;BDS/GPS组合系统相比于单一系统,明显提高定位的稳健性和精度,改善模糊度固定的成功率。
%As to single‐system RTK ,the number of visible satellites is small .This paper studies the across‐receiver of RTK algorithm model ,which uses combined partial minimization of quadratic functions with LAMBDA method to search ambiguity .The model analyzes the positioning performance of RTK combined with BDS/GPS . The short baseline measurement data analysis shows that :the cross‐receiver of RTK model is equivalent to double‐difference model .Compared to a single system , the combined BDS/GPS system can significantly improve the positioning accuracy and robustness ,and improve the success rate of ambiguity fixing .【期刊名称】《测绘工程》【年(卷),期】2016(025)012【总页数】6页(P16-20,24)【关键词】站间单差;BDS/GPS;RTK;二次型函数部分最小化;LAMBDA【作者】满小三;孙付平;潘国富;丁赫;刘帅;吴帅【作者单位】信息工程大学导航与空天目标工程学院,河南郑州 450001;信息工程大学导航与空天目标工程学院,河南郑州 450001;广州中海达卫星导航技术股份有限公司,广东广州511400;信息工程大学导航与空天目标工程学院,河南郑州 450001;信息工程大学导航与空天目标工程学院,河南郑州 450001;信息工程大学导航与空天目标工程学院,河南郑州 450001【正文语种】中文【中图分类】P228北斗卫星导航系统(BDS)于2012年底已提供区域卫星导航定位服务,计划于2020年完成全部星座的布设,并提供全球卫星导航定位服务[1]。