基于STM32的智能扫雪机设计
基于STM32和ARM Cortex-A8平台的自清扫智能小车设计

基于STM32和ARM Cortex-A8平台的自清扫智能小车设计任金波;张翔;施火结【摘要】针对路面边缘排水槽清理难、转弯处清理容易损坏毛刷盘等问题,设计出一种基于STM32和ARM Cortex-A8平台的集行走、控制、图像识别与路径检测、水槽清扫、集尘等多功能于一体的自清扫小车.根据实际应用要求,完成了自清扫小车的机械结构和控制系统设计,并进行了图像处理和运动仿真实验,结果表明:图像识别与路径检测系统处理一副500×360像素的图像平均耗时仅需0.082s,可实时检测到路面和排水槽清扫路径,且在复杂路面上可保持稳定运动,从而有效引导自清扫小车对路面边缘排水槽进行自动清扫.【期刊名称】《制造业自动化》【年(卷),期】2018(040)008【总页数】5页(P131-134,156)【关键词】自清扫;智能小车;图像处理;路径检测【作者】任金波;张翔;施火结【作者单位】福建农林大学机电工程学院,福州 350002;重庆大学机械工程学院,重庆 400044;福建农林大学机电工程学院,福州 350002;福建农林大学机电工程学院,福州 350002【正文语种】中文【中图分类】TP230 引言近年来,随着经济的发展和生活水平的提高,人们对路面的铺装要求越来越高,尤其是广场、公园、庭院、小区等道路,广泛使用大理石、花岗岩、砂石、混凝土砖及其他材料铺装路面,沿路面两侧边缘常设有排水槽,因排水槽宽度和高度较小,受落叶、石粒、杂草等影响经常容易堵塞,给排水带来严重影响,而清理时又极为困难,目前主要靠人工手工清理作业,劳动强度大,如能以自动清扫设备进行作业,将能显著提高清理效率,降低劳动强度。
本文提出一种基于STM32和ARM Cortex-A8平台的自清扫智能小车,能在以大理石、花岗岩、混凝土砖等进行铺装的路面对边缘排水槽进行清扫,清扫时可对路面和排水槽进行精确定位,自动控制毛刷盘位置来配合小车的行走动作,沿排水槽自动完成清扫作业。
基于STM32智能板擦机器人的研究与设计

基于STM32智能板擦机器人的研究与设计摘要目前,智能家居、人工智能技术已经渗透我们生活中的方方面面,在广电、银行、电信、家居、教育等方面都有很大的发展和突破。
为此,研究出一种具有粉尘识别的智能黑板擦,以STM32单片机为其控制中心,设计板擦机器人识别粉尘、自由移动各个控制系统的有效结合,并通过STM32单片机输入的脉冲PWN波的不同加速度来控制板擦的上下、左右前进后退的动作。
本项目可以很好地延伸到其他相关方面,涉及日常生活中的很多领域,有一定的实际应用价值。
关键词服务机器人;自控;识别;STM32前言随着人工智能时代的到来,各行各业都离不开互联网产业。
互联网向传统行业渗透,实质是传统行业需要互联网。
教育行业是最具有传统行业的代表之一,然而粉笔是传播文化的工具,人类几千年文化的积淀通过粉笔相传,而粉尘灰长期会引起人体皮肤、呼吸道等身体的不适,故对自动运转的板擦机器人的需求日益明显。
因此本文设计了一种STM32智能板擦机器人,有明显的粉尘传感器、采集电路、四轮驱动机构,利用粉尘传感器实现定位,利用电机正反转原理控制板擦的上下左右的移动,实现全自动擦黑板功能,进而很好地避免了对教师身体健康的影响。
1 总体设计方案智能板擦机器人可以完成教室中人工的擦黑板的系列动作,通过机器的上下左右运动来完成黑板的擦拭,以STM32控制器为核心。
本设计的机械本体由中间运动平台、主支撑平台构和线路系统控制系构成。
其中中间运动平台主要由2根光轴、2块亚克力中间盖板及直线轴承和单边法兰轴承搭建;主支撑平台用2块不同的亚克力板和若干螺丝分别固定步进电机和铝合金到相应的槽口位置;线路装置由1块主板2个A4988驱动及其与配件构成,且本设备提供12V直流电作驱动控制系统[1]。
2 硬件控制系统设计2.1 STM32简介STM32C5616AD微控制器作为整个控制系统的核心,它是一种高性能、宽电压、低功耗、成本低的嵌入式处理器。
工作频率在0—35MH之间,有外部掉电检测电路,可在掉电时及时将数据保存进EEPROM,并进行外部中断唤醒(可支持下降沿/上升沿和远程唤醒),内置Flash程序存储器可达62K、4个16位定时器,10位高速ADC,速度可达25万次/秒,2路PWM还可当2路D/A使用,并且可以使用Keil软件利用C进行编程,不需要操作系统,下图为最小系统电路图电路图,如图1所示[2]。
基于STM32马路清洁车结论

基于STM32马路清洁车结论今天,要来聊一聊一种特别厉害的马路清洁车,它,和我们平常看到的清洁车可有点不一样,它是基于STM32的马路清洁车!想象一下,我们每天走在上学的路上,街道上有时候会有一些垃圾,像被风吹落的树叶,小朋友不小心掉落的零食包装纸,这些垃圾让街道看起来不那么整洁干净。
这时候,就轮到我们的STM32马路清洁车大显身手!这个清洁车就像一个勤劳的小机器人,它有着圆圆的身体,还有好多神奇的“装备”。
比如说,它有一双像大扫帚一样的刷子,这些刷子转起来,就像在跳舞一样,能把地面上的灰尘、小石子还有那些垃圾都扫到一起。
就好像有个小魔法师,用魔法把垃圾都聚集在了一块儿。
还有,它还有一个像大嘴巴一样的吸口。
当刷子把垃圾扫到一起后,这个大嘴巴就会把垃圾全都吸进去,就像我们用吸管吸果汁一样,垃圾一下子就被吸到清洁车的“肚子”里。
而且,它吸垃圾的时候可不会把灰尘弄得到处都是,街道还是干干净净的,我们路过的时候也不会被灰尘呛到。
那你可能会问,这个清洁车怎么知道哪里有垃圾,该往哪里走?这就是STM32的功劳!STM32就像是清洁车的小脑袋,特别聪明。
它可以通过一些小传感器来“看”周围的环境。
比如说,它能“看”到哪里有垃圾比较多,然后就指挥清洁车往那个方向走;它还能“看”到有没有障碍物,要是前面有个大石头或者一辆小汽车停在那里,它就会绕开,可机灵!有了这个STM32马路清洁车,我们的街道变得更加整洁漂亮了。
就像给街道穿上了一件干净的新衣服,我们走在路上心情也会变得格外好!而且,它还节省了清洁工人叔叔阿姨们很多的力气,让他们不用那么辛苦地拿着大扫帚扫来扫去。
STM32马路清洁车是不是很神奇?它就像我们的好朋友一样,默默地为我们的城市街道保持干净整洁。
以后,说不定还会有更多这样神奇的发明,让我们的生活变得更加美好!。
基于单片机技术的小型智能清雪车的设计
2017年第9期(下转第111页)项目来源:大学生创新创业训练计划项目“小型清雪车”(201710232015)作者简介:郝鹏(1996-),男,黑龙江佳木斯人,大学本科,主要研究方向:机电一体化,远程数据传输。
通讯作者:吴志东(1985),男,讲师,在读博士,主要从事农业电气化与自动化,机电一体化系统建模等方面的研究。
基于单片机技术的小型智能清雪车的设计郝鹏1,张晏嘉2,吴志东1,何义波1,赵薇1,张华锦1,沈野1,高威明1,石磊1(1.齐齐哈尔大学,黑龙江齐齐哈尔161000;2.齐齐哈尔技师学院,黑龙江齐齐哈尔161000)摘要:针对清理小型场地积雪的问题,设计的小型智能清雪车。
小型清雪车采用模块化设计,可使用手机连接到局域网然后通过WIFI 对其进行控制,以此实现自动清雪作业。
无人清雪车上安装有红外测距传感器,可以自动报警,来保证清雪车与工作范围内的障碍保持安全距离,从而加强其工作安全性。
关键词:单片机;电机控制;清雪车;数据传输针对传统人工清雪与大型设备清雪存在的问题,设计了这种小型清雪车,此清雪车设计成本低,操作简单,不仅能提高清雪效率,又节省了人力财力。
清雪车体积小,不占用空间,并且用模块化设计,功能灵活,在具备人工操作清雪功能的基础上又安装了智能系统,可以远程控制此清雪车工作,通过在清雪车上安装测距传感器,可以保证清雪车与工作范围内的障碍保持安全距离,从而加强安全性,使此设计变得更智能化,是清理中小型场地积雪的最佳选择。
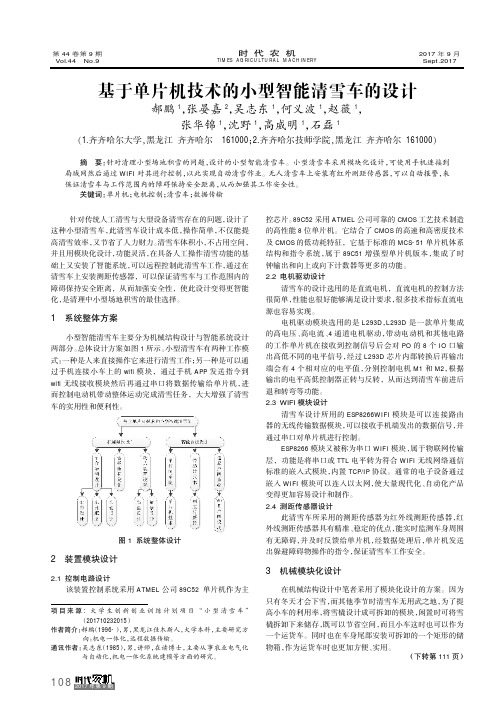
1系统整体方案小型智能清雪车主要分为机械结构设计与智能系统设计两部分。
总体设计方案如图1所示。
小型清雪车有两种工作模式:一种是人来直接操作它来进行清雪工作;另一种是可以通过手机连接小车上的wifi 模块,通过手机APP 发送指令到wifi 无线接收模块然后再通过串口将数据传输给单片机,进而控制电动机带动整体运动完成清雪任务,大大增强了清雪车的实用性和便利性。
图1系统整体设计2装置模块设计2.1控制电路设计该装置控制系统采用ATMEL 公司89C52单片机作为主控芯片。
基于STM32单机的扫地机器人设计
基于STM32单机的扫地机器人设计摘要:随着科学技术的快速发展,服务类机器人已经广泛应用到人们的日常生活中。
不仅提高了人们的生活质量,还为人们节省了大量时间。
因此,进行扫地机器人的设计与研究工作就具有十分重要的意义。
本文以STM32单片机作为核心控制器,通过电源电路、光耦隔离电路、H桥电机驱动电路的设计以及红外传感器模块的应用,设计出一款可以将地上的纸屑等杂物吸入垃圾收纳盒的扫地机器人,并且该机器人还具有前方遇障碍物自行躲避,前方悬空可防坠落等功能。
关键词:STM32;光耦隔离:H桥电机驱动:红外传感器模块0 引言近年来,随着科学技术的快速发展,人们生活水平日益提高,人们越来越注重时间成本的节约。
因此,家庭服务类智能机器人在人们日常生活中得到了广泛的应用。
本文以STM32单片机作为核心控制器,通过电源电路,光耦隔离电路,H桥电机驱动电路的设计以及红外传感器模块的应用,设计开发了一款具有清扫功能的机器人。
1 系统整体设计扫地机器人整体设计主要分为结构设计和系统设计。
结构设计主要使用SolidWorks制图软件设计扫地机器人所需零件。
运用3D打印技术和激光雕刻机完成结构的打印以及外形的雕刻。
系统设计分为硬件电路设计和软件程序调试,硬件电路设计主要包含电源电路、光耦隔离电路、H桥电机驱动电路。
软件程序调试主要分为红外数据采集与处理程序设计和PWM控制电机转速程序设计。
系统整体方案框架如图1所示。
2 结构设计结构设计主要使用Solidworks制图软件,3D打印机以及激光雕刻机。
SolidworLs软件是一个基于Windows开发的三维CAD系统,3D打印机是一种累积制造技术,即快速成形技术的一种机器,其以数字模型文件为基础,运用特殊蜡材、粉末状金属或塑料等可粘合材料,通过打印一层层的粘合材料来制造三维的物体。
激光雕刻机是利用激光技术对物体进行雕刻的一种设备,用此设备雕刻物体可使雕刻处表面光滑,且可以快速降低被雕刻处的温度,减少被雕刻物体的形变。
基于STM32单片机的城轨智能清洁装置结构设计研究

Che Chang1, Liang Yibin2 (1.Shaanxi Vocational and Technical College of Communications, Xi'an 710018, China;
智能清洁装置的电子硬件部分以模块化的 架构进行设计,其中每个模块独立运行,不同模 块间通过控制层实现信息交流,同时也可通过增
20
Copyright©博看网. All Rights Reserved.
《装备维修技术》2023年第3期(总195期)
加新的硬件模块实现系统功能的拓展,根据清洁 车总体设计的划分,硬件部分也可分为输入感知
本清洁机器人拥有更小的转弯半径,大大地 改善了平衡性和可操控性,性价比高。同时采用 橡皮轮胎具有一定的越野性能,针对城市轨道交 通区间隧道等场所均可保证正常作业。 2.2 清洁装置设计
清洁装置采用风机作为执行装置。风机马达 通电后高速旋转,使清洁装置内部产生负压,在
19
Copyright©博看网. All Rights Reserved.
(3)无人自动巡航清洁、雾化消杀一体化。 夜晚车站停止运营后,采用人工智能技术实现无 人自动巡航清洁及雾化消杀的功能,边清洁边消 杀,在保证车站站台、站厅清洁度的同时有利于 降低病毒的传播。本产品基于PRD算法提出JPSPO算法实现无人巡航清洁,小型电泵、交互面 板、75%浓度酒精实现智能雾化消杀,在保证车站 清洁度、人员安全前提下,有效降低病毒传播。
摘要:为减轻保洁人员劳动负担,提高劳动效率,以智能跟随、辅助垃圾分类回收为出发点, 研究并设计出一款基于骨骼关键点与颜色信息的目标识别技术而实现对保洁人员跟随的智能清 洁装置。实验结果表明:该研究能有效提高城轨清洁人员工作效率,降低工作强度,同时有助 于小型环卫清洁车及相关产品的研究,具有良好的社会与经济效益。 关键词:清洁装置;高效清扫;垃圾分类;自动跟随
《2024年基于STM32智能小车的设计与实现》范文
《基于STM32智能小车的设计与实现》篇一一、引言随着科技的发展和智能化需求的提高,智能小车因其高灵活性、便利性以及广阔的应用前景,正逐渐成为研究领域的热点。
STM32系列微控制器以其强大的性能和灵活的配置,为智能小车的开发提供了强大的硬件支持。
本文将详细介绍基于STM32的智能小车的设计与实现过程。
二、系统概述本系统主要包含STM32微控制器、电机驱动模块、电源模块、传感器模块(如红外避障传感器、超声波测距传感器等)以及上位机通信模块等。
通过STM32微控制器的控制,实现智能小车的自动避障、寻迹、速度控制等功能。
三、硬件设计1. STM32微控制器STM32微控制器作为整个系统的核心,负责接收传感器数据,处理数据并发出控制指令。
本系统选用STM32F4系列微控制器,其强大的处理能力和丰富的接口资源,为系统的稳定运行提供了保障。
2. 电机驱动模块电机驱动模块负责驱动小车的运动。
本系统采用H桥电路驱动方式,通过PWM信号控制电机的转速和方向。
同时,为了保证系统的稳定性,我们采用双电机驱动方式,实现小车的双向运动。
3. 传感器模块传感器模块是智能小车的“眼睛”,用于感知外部环境。
本系统主要使用红外避障传感器和超声波测距传感器。
红外避障传感器用于感知前方障碍物,超声波测距传感器用于测量与前方障碍物的距离。
此外,还可以根据需要增加其他传感器,如摄像头等。
4. 电源模块电源模块为整个系统提供稳定的电源。
本系统采用锂电池供电,通过DC-DC转换器将电压稳定在合适的范围内,以保证系统的稳定运行。
四、软件设计软件设计是智能小车实现各种功能的关键。
本系统采用C语言进行编程,使用STM32标准外设库进行开发。
软件设计主要包括以下几个方面:1. 初始化程序:对STM32微控制器及其外设进行初始化设置,包括GPIO口、PWM口、串口等。
2. 传感器数据处理:通过读取传感器数据,进行数据处理和解析,得到小车所需的信息。
3. 控制算法:根据传感器数据和预设的算法,计算出电机的控制指令。
基于STM32的智能扫描式3D打印机
智能应用0 引言在科学飞速发展的这些年,3D打印技术诞生了,它带着浓厚的科幻气息缓缓地走进人们的视线之中。
但看似科幻的3D打印机的原理其实不难理解,它的工作方式与传统打印机非常相似,传统的打印机的打印原材料是墨水,而3D 打印的原材料是光固化液态树脂或是零碎的塑料和金属粉末。
在打印机与计算机连接后,通过计算机的软件和外部硬件的控制将打印材料塑形,最终得到人们想要的实物。
但3D打印技术自面世以来,绝大多数情况都是被用在建筑工程作业中,或是工业设计的大型物体的制作当中,并没有真正进入人们的生活,也没法让更多人领略3D打印的魅力和这项技术所带来的便捷。
因此,制作一台能够在生活中易于使用的3D打印机,利用3D打印技术给人们的生活带来便利,是一个值得去实现的想法。
1 3D打印机设计方案在3D打印机中,STM32开发板在其中起到了几种重要的作用:(1)通过开发板上的I/O端口接到外部扫描仪读取扫描得到的图像信息并进行处理,再将处理过的信息传输给上位机。
(2)接受上位机传来的数据并将其置入烧录好的程序中,用以驱动电机、舵机等外部设备进行工作。
单闭环控制结构稳定性强,可排除掉部分不确定因素,在校准机械臂的坐标时可使校准结果更加精准。
经过思考与比较,单闭环控制结构的优点更明显,同时也与我们的设计思路更加契合,因此我们决定使用这种控制结构,图1为系统结构示意图。
以下将对整个系统的工作模式进行概述:摄像头将扫描得到的图像数据通过A/D转换后传输给STM32开发板,开发板根据不同位数的色彩深度将其转化为对应的灰度图并进行图像编码压缩后传输给上位机,上位机可根据不同的需求进行具体修改。
将确定完毕的数据传输给STM32开发板后,开发板根据烧录的程序对数据进行FFT、群运算等处理后用PID控制驱动电机,使机械臂工作。
图1 系统结构图2 3D打印机硬件设计在3D打印机的硬件方面,是由STM32开发板为主体组成的控制中枢电路、A/D 转换与 电机驱动模块在整个系统中发挥了不可或缺的作用,以下将会对这两部分硬件的功能指标以及工作方式等方面进行详细介绍。
基于STM32_单片机的智能冰厚测量系统设计
第22期2023年11月无线互联科技Wireless Internet Science and TechnologyNo.22November,2023基金项目:大学生创新创业训练计划项目;项目编号:202210066008㊂天津市教委科研计划项目;项目编号:2021KJ012㊂作者简介:戴含秀(2002 ),女,浙江金华人,本科;研究方向:测控技术与仪器㊂∗通信作者:董建(1985 ),男,河北唐山人,副教授,博士;研究方向:测控技术与仪器㊂基于STM32单片机的智能冰厚测量系统设计戴含秀,董㊀建∗,宋政达,盛文昊(天津职业技术师范大学天津市信息传感与智能控制重点实验室,天津300222)摘要:文章旨在设计和实现一种基于STM32单片机的智能冰厚测量系统,通过系统的需求分析㊁系统设计和硬件设计等环节,实现对冰层厚度的自动测量功能㊂研究成果将有助于提高冰层测量的效率和准确度,为冰面作业和冰层厚度监测提供更可靠的数据支持㊂此外,该系统的设计和实现还可为其他类似应用场景提供参考和借鉴,推动智能化㊁自动化技术在环境监测领域的应用㊂关键词:STM32;冰层厚度;智能检测系统中图分类号:TP368㊀㊀文献标志码:A0㊀引言㊀㊀随着科技的发展和智能应用的不断扩展,人们对智能化㊁自动化的需求也越来越高㊂冰川是地球上重要的水资源和气候变化的指示器,对于冰面的研究和监测具有重要的科学意义和应用价值㊂其中,测量冰的厚度是了解冰面变化的关键指标之一㊂传统的测量冰层厚度方法通常采用人工测量的方式,操作烦琐㊁耗时且存在一定的安全风险㊂而基于STM32单片机的智能冰厚测量系统,通过引入自动化及传感器技术,可以实现对冰层厚度的准确㊁快速测量,提高测量效率和准确度㊂因此本文研究开发一种基于STM32单片机的智能冰厚测量系统㊂该系统通过超声波传感器获取冰层的厚度信息,并通过STM32单片机进行数据处理和控制㊂实验结果表明,该系统能够准确测量冰层的厚度,并具有较高的精度和稳定性㊂本论文的研究成果为其他基于STM32单片机的智能测量系统的设计提供了参考㊂1㊀系统概述㊀㊀设计智能冰厚测量系统的目的是提供一种高效㊁准确㊁安全的测量冰层厚度的方法㊂系统使用先进的超声波传感器和算法,具有较高的计算能力和精确的时钟控制,可以准确地测量冰层的厚度[1-2]㊂相比之下,人工测量可能受到主观因素的影响,容易出现误差且在冰上进行测量存在一定的危险性,特别是在薄冰或隐形冰层上㊂智能测冰厚系统具有较强的抗干扰能力和稳定性,能够在恶劣的环境下正常工作并保证系统的稳定性和可靠性,避免人员直接接触冰面,减少潜在的安全风险㊂同时,STM32单片机具有快速的响应速度和实时性,能够实时监测冰层的厚度变化,方便用户及时了解冰情㊂本系统可以及时提醒相关单位或个人采取措施,确保人员和设备的安全㊂另外,本系统采用低功耗设计,能够有效降低系统的能耗,延长电池寿命,适用于长时间工作的环境㊂系统丰富的外设接口和通信接口,可以方便地与其他硬件设备进行连接,实现系统的功能扩展和数据传输㊂综上所述,基于STM32单片机的智能测冰厚系统可以提高测冰厚效率㊁准确性和安全性,能够实现精确测量㊁实时监测㊁高效能耗㊁可靠稳定和扩展性强的优势,满足用户对冰厚测量的需求,为冰上活动提供可靠的数据支持[3-4]㊂2㊀系统设计㊀㊀智能测冰厚系统是一个基于STM32单片机的设备,用于测量冰层的厚度㊂该系统通过超声波传感器获取冰层的厚度信息,通过单片机进行数据处理和显示㊂智能测冰厚系统主要由以下几部分组成:(1)STM32单片机㊂其作为系统的核心处理器,负责接收传感器数据,进行数据处理和控制输出;(2)其他部件㊂其包含:用于测量冰层厚度的超声波传感器,用于显示测量结果和系统状态的显示屏,为系统提供稳定电源供应的电源模块和用于连接其他外部设备,以实现数据传输和控制的外部接口㊂系统的工作流程:系统上电后,STM32单片机进行初始化,包括引脚配置㊁时钟设置等㊂单片机通过与超声波传感器的接口进行通信,获取传感器测量到的冰层厚度数据,并对传感器获取的数据进行处理,包括滤波㊁数据校正等操作,得到准确的冰层的厚度值㊂然后,将处理后的冰层厚度值通过显示屏输出,以供用户查看㊂系统可以通过外部接口将测量到的冰层的厚度数据传输到其他设备,如电脑或手机等,以实现数据的共享㊁存储和分析㊂用户也可以通过外部接口对系统进行控制,如启动测量㊁调节测量参数等㊂系统流程如图1所示㊂图1㊀智能测冰厚系统流程3㊀硬件设计㊀㊀硬件设计对于系统的重要性不可忽视㊂它是构建单片机的智能测冰厚系统的基础,直接影响着系统的性能㊁稳定性和可靠性㊂3.1㊀单片机主芯片㊀㊀本智能测冰厚系统的主要组成部分是STM32单片机㊂STM32F103C8T6是一款由意法半导体生产的32位ARM Cortex -M3内核的微控制器芯片,具有丰富的外设和功能,适用于各种智能应用㊂STM32F103C8T6具有丰富的存储器:64KB 的闪存(用于存储程序代码)㊁20KB 的静态RAM(用于存储数据)和2KB 的EEPROM (用于存储配置参数等)㊂该芯片采用了低功耗设计,支持多种低功耗模式,可在电池供电的嵌入式应用中实现长时间运行㊂使用STM32F103C8T6芯片进行开发时,可以选择使用官方提供的集成开发环境(如STM32CubeIDE㊁MDK -ARM 等)或第三方开发工具(如Keil㊁IAR 等)进行开发㊂可使用C 语言或汇编语言进行编程㊂开发工具通常提供相应的编译器和调试器㊂根据具体应用需求,编写相应的程序代码,并使用开发工具进行编译㊁调试和下载㊂同时,需要设计相应的电路板,包括连接外设和传感器㊁供电电路等㊂最后,使用开发工具提供的调试功能,对程序进行调试和测试,以确保程序的正确性和稳定性㊂该单片机的主芯片电路原理如图2所示㊂3.2㊀晶振电路㊀㊀STM32F103C8T6的晶振电路是其工作时钟的重要组成部分㊂晶振电路主要用于提供STM32F103C8T6微控制器的主时钟信号㊂通过晶振电路,微控制器能够根据晶振的频率来同步其内部时钟,以确保微控制器的正常工作㊂该电路通常由1个晶体振荡器和2个电容组成㊂需要将晶体振荡器的2个引脚分别连接到微控制器的晶振输入引脚(一般为PA9或PB8)和晶振输出引脚(一般为PA8或PB9),并将2个电容连接到晶振振荡器的2个引脚上,以提供稳定的工作环境㊂在使用STM32F103C8T6时,需要配置系统时钟源为外部晶振㊂可以通过设置相关的寄存器来实现,具体的配置方法可以参考相关的数据手册和开发工具㊂在使用晶振电路之前,需要通过初始化函数来设置系统时钟㊂在晶振电路正常工作后,可以编写应用程序来实现相应的功能㊂通过读取晶振频率,可以确定系统的运行速度,从而进行相应的操作㊂STM32F103C8T6晶振电路的功能是提供主时钟信号,使微控制器能够正常工作㊂使用方式包括连接晶振电路㊁配置时钟源㊁初始化系统时钟和编写应用程序㊂4㊀结语㊀㊀本文基于STM32单片机的智能测冰厚系统进行了研究与实验㊂通过对系统的设计和实现,成功地将STM32单片机与超声波传感器㊁显示器等硬件设备进行了有效的集成,实现了对冰厚的准确测量和实时显示㊂STM32单片机具有较高的计算性能和稳定性,能㊀㊀图2㊀STM32F103C8T6主芯片电路原理够满足智能测冰厚系统的实时要求㊂本系统能够准确地测量冰层厚度,并通过显示器实时显示测量结果㊂同时,系统还能够自动判断冰的厚度是否达到安全标准,不达标时发出相应的警报指令㊂本研究对于智能测冰厚系统的设计和实现具有一定的参考价值,未来可以进一步优化系统设计,提高测量精度和速度,以满足更多实际应用场景的需求㊂参考文献[1]钟家弘,陶英婷.基于STM32的超声波测距仪[J ].物联网技术,2023(9):32-35.[2]晏雨婵.基于STM32单片机的超声波测距系统[J ].内燃机与配件,2022(17):76-78.[3]王鹏,张涛,龚克,等.超精密超声波测距装置设计[J ].信阳师范学院学报(自然科学版),2022(3):469-474.[4]夏继强,郑昆,郑健峰,等.基于STM32的收发一体式超声波测距系统[J ].仪表技术与传感器,2014(8):43-45,52.(编辑㊀姚㊀鑫)Design of smart ice thickness measurement system based on STM 32microcontrollerDai Hanxiu Dong Jian ∗ Song Zhengda Sheng WenhaoTianjin Key Laboratory of Information Sensing &Intelligent Control Tianjin University ofTechnology and Education Tianjin 300222 ChinaAbstract This paper aims to design and implement an intelligent ice thickness measurement system based on STM32microcontroller.Through the analysis of system requirements system design and hardware design the automatic measurement function of ice thickness is realized.The research results will help improve the efficiency and accuracy of ice thickness measurement and provide more reliable data support for ice surface operation and monitoring.In addition the design and implementation of this system can also provide reference for other similar application scenarios and promote the application of intelligent and automated technology in the field of environmental monitoring.Key words。
基于STM32单片机的智能家居系统毕业设计
设计报告基于STM32单片机的智能家居系统设计姓名:班级:学号:指导老师:yyyyyyyyy日期:2013.05.27~2013.06.07华南农业大学工程学院摘要目前市场上针对普通家庭的智能防盗、防火等产品很多,但基于远程报警系统的智能家居产品价格不菲。
本次设计的基于STM32的智能家居报警系统实用性非常强,设计成本低廉,非常适合普通家庭使用,而且随时可以升级。
本产品采用的是以意法半导体公司生产的单片机STM32F103RBT6作为主控芯片,AT24C02作为静态存储芯片,4*4 薄膜键盘和红外热式感应作为探测器,GSM和扬声器的家庭报警模块。
随着信息技术的发展,实现家居的信息化、网络化,是当前智能家居系统发展的新趋势。
本设计将通信技术与防盗系统紧密结合,为一款便敏小巧,低成本,适合普通室内报警的智能报警系统。
本系统通过传感器获取室内人员信息,并将信号发送到单片机微处理器。
系统收到报警信息后通过辨认密码的方式确定目标身份,并通过蜂鸣器报警的方式警示入侵者。
另外,系统配备具手机通信功能的GSM模块,能将室内安全状况第一时间发送至用户手机终端。
不仅大大提高系统安全性及智能性,也方便用户的使用。
经测试,本系统稳定可靠,同时具有友好的人机界面,为用户提供安全服务的同时,实现系统智能化管理。
关键字:智能报警存储器传感器 GSM目录1 方案比较与选择 (1)1.1 方案一:采用数字电路控制 (1)1.2 方案二:采用双音多频电路与语音电路相结合的控制方案 (1)1.3 方案三:采用以STM32单片机为核心的控制方案 (2)2 主要元器件介绍 (3)2.1 主芯片—STM32 (3)2.2 显示屏--OLCD12864 (4)2.3 外部存储芯片--AT24C02 (5)3 模块分析 (7)3.1 STM32控制模块 (7)3.2 密码锁键盘输入及存储模块 (7)3.3人体热释感应模块 (7)3.4显示模块 (7)3.5报警模块 (7)4 硬件组成部分 (8)4.1 硬件组成部分 (8)4.2 仿真分析 (11)5 电路板的制作,焊接,调试 (13)5.1电路板制作 (13)5.2电路板焊接 (14)5.3电路板调试 (14)6 讨论及进一步研究和建议 (15)7 课程设计心得 (16)附录 (17)参考文献 (34)1、方案的比较与选择1.1 方案一:由数字电路搭建的智能家居安全系统,用以双JK触发器构成的数字逻辑电路作为密码控制系统的核心控制,共设了9个数字输入键,还有确认键和取消键等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
龙源期刊网 http://www.qikan.com.cn
基于STM32的智能扫雪机设计
作者:佟昊 王钧华
来源:《科学导报·学术》2019年第48期
龙源期刊网 http://www.qikan.com.cn
摘要:本文提出通过STM32F103ZET6作为开发平台制作智能扫雪机,可实现手机APP
远程操控,在机器释放的无线网络中工作,通过摄像头将来人图像传输到手机终端,对扫雪的
情况实时反馈以专门的电动机为扫雪刷提供动力,达到最佳的扫雪效果,并采用履带式底盘,
抓地力强不易打滑,提高扫雪效率。
关键词:扫雪机;STM32F103ZET6;智能
引言:在我国北方,冬季降雪期长且降雪量大,每次下雪后积雪给居民的生活带来很多棘
手的问题。而现有的小型扫雪机多为手扶式,操作人员需要在雪地里进行除雪作业,工作环境
恶劣。随着科学技术的发展,在4G时代和5G时代的到来,智能手机可以说已经成为了家庭
的智能控制中心,已被广泛使用且在智能家居和移动机器人控制等领域,但现阶段对智能手机
远程操控扫雪机的研究较少。因此可参考其他领域的智能手机控制技术研究小型扫雪机手机控
制系统。结合智能手机控制技术提升小型扫雪机的自动化水平,使操作人员可在舒适的环境下
例如待在温暖的室内用智能手机控制扫雪机作业,对于提高人们的生活质量具有积极的意义。
一、方案设计
在本次研究中,智能扫雪机主要由智能扫雪机的控制系统和机械结构主体两个部分组成,
其中控制系统主要包括Android手机客户端、智能扫雪机的控制器、摄像头模块和Wi-Fi模
龙源期刊网 http://www.qikan.com.cn
块,该控制系统响应使用者从Android手机客户端发出的命令通过Wi-Fi无线网络对扫雪机进
行控制,以完成操作者想要实现的各种除雪动作。
经过研究发现智能扫雪机手机控制系统的重要意义在于冬季方便操作者足不出户实现对其
庭院进行除雪作业。因此该小型扫雪机控制系统的设计方案必须要实现对室外扫雪场景的图像
进行无线传输的功能,以使操作者可在室内通过手机控制扫雪机在庭院里进行除雪作业,并可
通过手机屏幕对工作状态进行实时监测,同时扫雪机上必须要有一个控制器将扫雪机手机控制
系统所选用的摄像头不断地采集除雪作业现场的图像,将其压缩成视频流,然后经Wi-Fi模块
处理,通过Wi-Fi网络发送到Android手机客户端,及时反映除雪作业现场状况。
二,智能扫雪机系统设计
扫雪机使用了伺服电机进行驱动,装配有摄像采集模块、L293D电机驱动模块、
STM32F103ZET6控制模块。用户在远程操控扫雪机各种动作之前,需要将扫雪机通过无线局
域网连接到互联网。用户可以通过Android ;APP 或网页前端控制扫雪机前进后退以及左右转
向移动或调整摄像头方向。摄像采集模块包含有无线局域网热点释放模块,可以连接到无线局
域网热点为视频传输提供网络基础。摄像头通过串型通用总线接口的方式与摄像采集模块连
接,我们采用免驱动的高清摄像头,分辨率可以达到480p,并能够自动对焦。
STM32F103ZET6模块负责控制电机、信号的产生,并由L293D电机驱动模块直接驱动电机工
作。伺服电机输入电压为6~12V,直流驱动。
系统分为三个部分:数据采集控制模块部分、电机驱动模块、图像回传无线局域网模块。
数据采集控制模块部分由各种传感器和STM32F103ZET6核心板组成;电机驱动模块由L293D
四倍高电流H桥电机驱动芯片及其控制板组成;图像回传WiFi模块由一个高清摄像头和一个无
线局域网数传模块组成。
无线局域网数传模块是是扫雪机的重中之重。因此对它做了一定的要求。系统中的无线局
域网模块与Android平台之间可以进行无线通信,摄像头将拍摄的视频通过USB接口实时传
输给无线局域网模块,由于控制模块处理视频数据速度不够,因此系统中WIFI模块将视频数
据直接传输给Android平台,在Android平台上实时显示摄像头拍摄的视频。Android平台发送
的控制命令也是通过无线局域网信道传输给无线局域网模块,通过WIFI模块的串行接口传输
给控制模块,控制模块对接收到的数据进行解码,根据解码信息控制扫雪机实现超声波测距避
障、循迹、跟随和遥控运行等功能。
三、智能扫雪机的软件设计
扫雪机上的视频采集模块采用了定制的 Android APP,提供网络连接、指令转发和视频流
采集、传输功能。当APP通过远程服务连接到扫雪机后,APP可以请求到当前扫雪机摄像头
龙源期刊网 http://www.qikan.com.cn
上的视频信息;同时,视频采集模块也将APP上传来的控制信号解析为指定格式和功能的协议
数据,并通过串口发送到 STM32控制模块。
扫雪机上的STM32F103ZET6控制模块在接收到相关控制信号后,调整输出脉冲信号的占
空比,由L293D驱动板转换输出电平后直接控制电机做出相应的动作,从而完成用户想要的
功能。
对于只需要实现简单的扫雪机控制的话,我们只需要实现通过串口向 STM32控制模块发
送控制信号即可,简单的控制信号协议如下:
所有的扫雪机控制命令都是以FFH开始和结束的,根据第一个字节的不同区分扫雪机运
动指令、舵机转动指令和扫雪机工作模式切换指令。对于扫雪机运动指令,由第二个字节控制
扫雪机停止、前进、后退和左右转等多种运动状态。
结束语:通过对扫雪机的测试,结果表明:Android平台与扫雪机之间WIFI传输正常,
实时拍摄视频在手机上显示清晰、无延迟;水平舵机转动角度可达到-90°~+90°,垂直舵机转动
角度可达到0~90°,以方便摄像头拍摄各个角度的视频,以及便于超声波模块测量不同方向
的障碍物距离;能通过Android平台控制扫雪机实现遥控运行、跟随、循线、避障等工作模式,
功能满足设计要求。
参考文献:
[1] 朱康熹.小型扫雪机手机控制系统的设计与研究[D].西南大学,2017.
[2] 李峰华.自动行走除雪機的研究[D].中国农业大学,2005.
(作者单位:哈尔滨石油学院)