附合导线内业计算(行业精制)
测绘中级 附合导线测量的内业计算的方法步骤
欢迎共阅 第三节导线测量的内业计算 导线测量内业计算的目的就是计算各导线点的平面坐标x、y。 计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。 一、坐标计算的基本公式
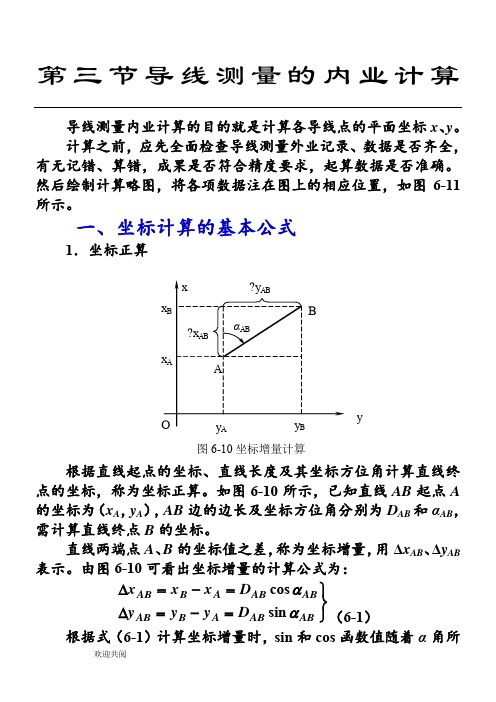
1.坐标正算
根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。如图6-10所示,已知直线AB起点A的坐标为(xA,yA),AB边的边长及坐标方位角分别为DAB和αAB,需计算直线终点B的坐标。 直线两端点A、B的坐标值之差,称为坐标增量,用ΔxAB、ΔyAB
表示。由图6-10可看出坐标增量的计算公式为:
ABABABABABABABABDyyyDxxxsincos
(6-1) 根据式(6-1)计算坐标增量时,sin和cos函数值随着α角所
x y xA xB yA yB ?yAB
?xAB
αAB
A
B
O 图6-10坐标增量计算 欢迎共阅
在象限而有正负之分,因此算得的坐标增量同样具有正、负号。坐标增量正、负号的规律如表6-5所示。 表6-5坐标增量正、负号的规律
象限 坐标方位角α Δx Δy
Ⅰ 0?~90? + + Ⅱ 90?~180? - + Ⅲ 180?~270? - - Ⅳ 270?~360? + - 则B点坐标的计算公式为:
ABABAABABABABAABABDyyyyDxxxxsincos
(6-2) 例6-1已知AB边的边长及坐标方位角为456380m62.135ABABD,,若A点的坐标为
m82.658m56.435AAyx,,试计算终点B的坐标。
解根据式(6-2)得 2.坐标反算 根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。如图6-10所示,已知直线AB两端点的坐标分别为(xA,yA)和(xB,yB),则直线边长DAB和坐标方位角αAB的计算公式为: 22ABABAByxD
测绘中级 附合导线测量的内业计算的方法步骤

根据直线起点和终点的坐标,计算直线的边长和坐标方位角,
称为坐标反算。如图 6-10 所示,已知直线 AB 两端点的坐标分别为(xA, yA)和(xB,yB),则直线边长 DAB 和坐标方位角 αAB 的计算公式为:
DAB
x
2 AB
y
2 AB
(6-3)
(6-4)
AB
arctan y AB x AB
3
2
3
108°27′18″
84°10′18″
121°27′02″
135°49′11″
4
90°07′01″
x
335°24′00″
1 x1=500.00m
y1=500.00m
5
图 6-11 闭合导线略图
1.准备工作 将校核过的外业观测数据及起算数据填入“闭合导线坐标计算 表”中,见表 6-6,起算数据用单线标明。 2.角度闭合差的计算与调整 (1)计算角度闭合差 如图 6-11 所示,n 边形闭合导线内角和 的理论值为:
2
应该注意的是坐标方位角的角值范围在 0˚~360˚间,而 arctan 函数的角值范围在-90˚~+90˚间,两者是不一致的。按式(6-4) 计算坐标方位角时,计算出的是象限角,因此,应根据坐标增量 Δx、 Δy 的正、负号,按表 6-5 决定其所在象限,再把象限角换算成相应 的坐标方位角。
例 6-2 已知 A、B 两点的坐标分别为
x
∆yAB
xB
B
∆xAB
αAB
xA
A
O
yA
yB
y
图 6-10 坐标增量计算
根据直线起点的坐标、直线长度及其坐标方位角计算直线终点
的坐标,称为坐标正算。如图 6-10 所示,已知直线 AB 起点 A 的坐
附合导线以及闭合导线方位角计算
(4)计算改正后新 的角值:
ˆi i V
1
1
970300
484318 A1
A
XA=536.27m
A
1122224
2
1051706
2
YA=328.74m
1233006
4 1014624
4
3
3
3、按新的角值,推算各边坐标方位角。
4、按坐标正算公式,计算各边坐标增量。
(2)满足精度要求,若观测角为左角,则将fα反符号 平均分配到各观测角上;若观测角为右角,则将fα同 符号平均分配到各观测角上。
方法2(*):
(1)计算角度闭合差:
f 测 理
其中, 理的计算公式如下:
左角:终 始 理(左) n 180 理(左) 终 始 n 180
例题:附合导线的计算
(1)绘制计算草图,在表内填写已知 数据和观测数据
D 41600
CD
(2)角度闭合差的计算与调整
XC=1845.69 YC=1039.98 C C
(3)各边方向角的推算
1803248
8
(4)坐标增量闭合差的计算与调整
4
(5)推算各点坐标。
7
2045430
5、坐标增量闭合差(closing error in coordination increment)计算与调整 1
1
970300
484318 A1
A
XA=536.27m
A
1122224
2
1051706
2
YA=328.74m
1233006
4 1014624
3
5
6
1811300
导线内业计算

h 建筑测量基本计算6导线测量的内业计算一、基本计算导线内业计算包括角度闭合差的计算和调整、方位角的推算、坐标增量闭合差的计算和调整及未知点的坐标计算。
1、角度闭合差的计算和调整 !)角度闭合差计算: a)附合导线 :CD 的方位角推算值CDα'与其已知值CD α若不等,其差值即称为角度闭合差βf 。
βf = CDα'-CD α=∑=ni i 1β -(CD α-AB α) 180⨯±n (6-3) b)闭合导线闭合导线角度闭合差为所有内角观测值之和与闭合n 边形内角和理论值180)2(⨯-n 之差,即∑==ni i f 1ββ-180)2(⨯-n (6-8)2)角度闭合差的调整如果βf 小于限差,说明观测成果符合要求,但是需要调整。
即将角度闭合差按相反符号平均分配于各角(其分配值即称原角度观测值之改正数)。
注:分配值一般取整至秒,并使其总和与角度闭合差二者绝对值相等。
3) 根据改正后的角值,重新计算各边的坐标方位角。
根据改正后的角值,重新计算各边的坐标方位角。
、最后算得的CDα'和已知值CD α应完全相等,可作为检核。
前α=后α+左β± 180 前α=后α-右β± 180注:上二式右端,若前两项计算结果<180,180前面用“+”号,否则180前面用“-”号。
2、坐标增量闭合差的计算合调整 1)坐标闭合差计算坐标增量闭合差是末端已知点坐标的计算值'C x 、'C y 和已知值C x 、C y 之差(分别称为纵坐标增量闭合差x f 和横坐标增量闭合差y f ): a )附合导线)(11'B Cn i iC Cx x xx x x f --∆=-=∑-= (6-4a))(11'B C n i iC Cy y y yy y f --∆=-=∑-= (6-4b)b)闭合导线闭合导线的起、终点为同一点,故将公式(6-4)式右端之第2项均改为0,即为闭合导线坐标增量闭合差。
附合导线以及闭合导线方位角计算
D
-9 +12
1119 00 24 1119 01 12
738.33
+614.90
+614.81+366.53 +366.41
+614.81
+366.53
理=11190112 = 测理=48 容=406 =98
xy
= +0.09 =0.12
= x²+ y²=0.150
K = D
=
1 4900
<
1 2000
附合导线以及闭合导线方位角计算
四.导线的内业计算——计算各导线点的坐标
(一)几个基本公式 1、坐标方位角(grid bearing)的推算
前 后 左 180
或: 前 后 右 180
注意:若计算出的方位角>360°,则减去360°; 若为负值,则加上360°。
例题:方位角的推算
2
2
改 正 后 坐标(米) 增量(米)
点 号
X Y X Y
A 1
2 3 4 A
48 43 18
+12
97 03 00 97 03 12
+12
131 40 06
105 17 06 105 17 18
101
+12 46 24
101
206
46 36
22
48
+12 123 30 06
123 30
18
284
36
12
其中, 理的计算公式如下:
左角:终 始 理(左) n 180 理(左) 终 始 n 180
右角:终 始 理(右) n 180 理(右) 始 终 n 180
闭合导线测量内业计算精编版
0.31m
WK
WD D
0.31m 1137.80m
1 3600
<WK p
1 2000
* ** * *
2.角度闭合差的计算与调整
(1)计算角度闭合差
n边形闭合导线内角和的理论值为:
th (n 2)180
式中 n ——导线边数或转折角数。
实测m的内角之和 与理论值th
为角度闭合差,用 表示,即f
(+) ∆y34 4 ∆(-x4)5 ∆y45(+)
O
*
(-)
x
2 ∆y12
3
∆x12
(+)
1
∆x51
(+)
4
5 ∆y51(+)
y O
*
2
1 Wy
WD Wx
1′
5
y
(3)计算导线全长闭合差WD和导线全长相对
闭合差WK
WD
Wx2
W
2 y
将WD与导线全长相比,以分子为1的分数表示,称为
导线全长相对闭合差WK,即
A
A
解 xB xA DAB cos AB
435.56m 135.62mcos803654
457.68m
yB yA DAB sin AB
658.82m 135.62msin803654
792.62m
2.坐标反算
根据直线起点和终点的坐标,计算直线的边长 和坐标方位角,称为坐标反算。 *
xAB xB xA DAB cos AB
yAB yB yA DAB sin AB
*
*
x xB
x ∆yAB B
∆xAB
DAB
AB
xA
A
O
yA
导线测量内业计算方法[1] (1)
導線測量的內業方法(一)閉合導線內業計算已知A點的座標X A=450.000米,Y A=450.000米,導線各邊長,各內角和起始邊AB的方位角αAB如圖所示,試計算B、C、D、E各點的座標。
1、角度閉合差的計算和調整閉合導線的內角和在理論上應滿足下列條件:角度閉合差:圖6—8閉合導線算例草圖角度的改正數△β為:2、導線邊方位角的推算BC邊的方位角CD邊的方位角…………………………………………AB邊的方位角(校核)右角推算方位角的公式:右角推算方位角的公式:3、座標增量計算設D12、α12為已知,則12邊的座標增量為:4、座標增量閉合差的計算與調整因為閉合導線是一閉合多邊形,其座標增量的代數和在理論上應等於零,即:但由於測定導線邊長和觀測內角過程中存在誤差,所以實際上座標增量之和往往不等於零而產生一個差值,這個差值稱為座標增量閉合差。
分別用表示:缺口AA′的長度稱為導線全長閉合差,以f表示。
由圖可知:圖6—9閉合導線全長閉合差導線相對閉合差。
對於量距導線和測距導線,其導線全長相對閉合差一般不應大於1/2000。
調整的方法是:將座標增量閉合差以相反符號,按與邊長成正比分配到各條邊的座標增量中,公式為:的改正數=的改正數=的改正數=米的改正數=米5、導線點的座標計算根據導線起算點A的已知座標及改正後的縱、橫坐標增量,可按下式計算B點的座標:起始點A的座標已知,則B點的座標為:(二)附合導線的內業計算圖6—10附和導線算例草圖1、角度閉合差的計算和調整2、座標增量閉合差的計算由於A、E的座標為已知,所以從A到E的座標增量也就已知,即:通過附合導線測量也可以求得A、E間的座標增量,用、表示由於測量誤差故存在座標增量閉合差:閉合導線座標計算表(點擊放大圖)附合導線座標計算表(點擊放大圖)。
导线测量内业计算方法
导线测量的内业方法(一)闭合导线内业计算已知A点的坐标X A=450.000米,Y A=450.000米,导线各边长,各内角和起始边AB的方位角αAB如图所示,试计算B、C、D、E各点的坐标。
1、角度闭合差的计算和调整闭合导线的内角和在理论上应满足下列条件:角度闭合差:图6—8闭合导线算例草图角度的改正数△β为:2、导线边方位角的推算BC边的方位角CD边的方位角…………………………………………AB边的方位角(校核)右角推算方位角的公式:左角:方位角=上一方位角+左角-180右角:方位角=上一方位角-右角+180 在左角推算方位角的公式:3、坐标增量计算设D12、α12为已知,则12边的坐标增量为:4、坐标增量闭合差的计算与调整因为闭合导线是一闭合多边形,其坐标增量的代数和在理论上应等于零,即:但由于测定导线边长和观测内角过程中存在误差,所以实际上坐标增量之和往往不等于零而产生一个差值,这个差值称为坐标增量闭合差。
分别用表示:缺口AA′的长度称为导线全长闭合差,以f表示。
由图可知:图6—9闭合导线全长闭合差导线相对闭合差。
对于量距导线和测距导线,其导线全长相对闭合差一般不应大于1/2000。
调整的方法是:将坐标增量闭合差以相反符号,按与边长成正比分配到各条边的坐标增量中,公式为:的改正数=的改正数=的改正数=米的改正数=米5、导线点的坐标计算根据导线起算点A的已知坐标及改正后的纵、横坐标增量,可按下式计算B点的坐标:起始点A的坐标已知,则B点的坐标为:(二)附合导线的内业计算图6—10附和导线算例草图1、角度闭合差的计算和调整2、坐标增量闭合差的计算由于A、E的坐标为已知,所以从A到E的坐标增量也就已知,即:通过附合导线测量也可以求得A、E间的坐标增量,用、表示由于测量误差故存在坐标增量闭合差:闭合导线坐标计算表(点击放大图)附合导线坐标计算表(点击放大图)。
附合水准路线内业计算.
fh Li L vh1 0.002 vh2 0.008 vh3 0.007 vh4 0.008
填表 填表 填表
计算各点改正后高差
计算各点改正后的高差
hi hi vhi
Hi Hi 1 hi
水准测量的内业计算
• 辅助计算填表
点号 BM.A 1 2 3 BM.B 路线长度 观测高 差 Hi/m +1.331 高差改正 数 Phi/m 改正后高 差 hi/m 高程 备注 已知
+1.033 -1.056 +1.342 -1.036 +1.054 -1.344
改正后 高差 Hi’/m
高程
备注 已知
H/m +1.034 42.120 -1.055 +1.343
计算 检核
wh h往 h返 wh容 40 L
1.84
h
1 ( h往 h返 ) 2
支水准测量的内业计算
BMA
h1 = + 1.331m L1=0.60km
水准测量的内业计算
原始数据与观测数据填表
点号 BM.A 1
2 3 BM.B 路线长度 L/km 0.60 2.00 1.60 观测高 差 hi/m +1.331 +1.831 -1.424 高差改正 数 vhi/m 改正后高 差 Hi’/m 高程 H/m 6.543
高程 H/m 6.543
备注
已知
0.60
2.00 1.60 2.05 6.25
+1.331
+1.831 -1.424 +1.340 +3.060
9.578
已知
导线测量的内业计算
f 允 60 n 120″
f i - (n 2) 180 =20″
i 1
n
(n=4)
f 允 60 n 120″
fβ<fβ允 ,精度符合要求。
2)调整角度闭合差 将角度闭合差按相反符号平均分配于各角:-20″/4=-5″。 计算改正后角值各内角值βi′=βi+(-5″) 3)推算各边方位角 因角度观测值为右角,故应用公式
vxi
fx Di D
v yi
D
fy
Di
式中, Di 为第 i 条边边长。 注:纵、横坐标增量改正数之的总和应分别等于纵、横坐标增量闭合差,而符号相反, 用于检核。 3) 计算待定导线点坐标 坐标增量闭合差调整后,根据起始点的已知坐标和经改正后的坐标增量计算各待定导线 点的坐标。 注:最后算得的末端点 x 、 y 坐标应和其已知值完全相符合,再次检核。 二、举例 例 1 已知四边形闭合导线内角的观测值见下表,试进行角度闭合差计算和调整,并推算出
f f x2 f y2
K | f | D 1 D/ | f |
(6-5) (6-6)
如果 K 小于限差,说明观测成果符合要求,但亦需要调整。 b)将纵、横坐标增量闭合差 f x 、 f y 反号,按与边长成比例分配于各边的坐标增量中 其分配值(即原纵、横坐标增量值之改正数) Vxi 、 Vyi 按下式计算:
' f x xC xC xi ( xC xB ) i 1 n 1
'
'
(6-4a)
' f y yC yC yi ( yC yB ) i 1
n 1
(6-4b)
b)闭合导线 闭合导线的起、终点为同一点,故将公式(6-4)式右端之第 2 项均改为 0,即为闭合导线 坐标增量闭合差。 2)闭合差调整 a)根据 f x 、 f y 计算导线全长闭合差 f 和全长相对闭合差 K: