三菱机械手-故障手册
三菱机器人操作基础

理、库存管理等方面的智能化。
案例二:搬运重物的应用
自动化搬运
三菱机器人在搬运重物方面具有很大的优势,可以代替人力进 行高效、准确的搬运作业。
节省人力
使用三菱机器人搬运重物可以节省大量人力,提高工作效率, 降低劳动强度。
提高安全性
三菱机器人具有稳定的控制系统和强大的感知能力,能够保证 搬运作业的安全性和准确性。
第二代机器人
感知机器人,具有感知和简单决 策能力,但缺乏灵活性。
第三代机器人
智能机器人,具有高度智能和学习 能力,能够适应复杂环境和任务。
02
机器人基础知识
机器人结构组成
1 2
移动机构
包括驱动器和传动装置,使机器人能够在不同 环境中移动。
感知系统
包括各种传感器和测量装置,用于感知周围环 境和自身状态。
04
三菱机器人应用案例
案例一:生产线上的应用
01
自动化生产
三菱机器人在生产线上的应用,可以大大提高生产效率,降低人工成
本,提高产品质量。
02
生产线监测
三菱机器人可以监测生产线上的异常情况,如零件短缺、设备故障等
,并自动调整生产流程。
03
生产管理
三菱机器人可以通过计算机程序控制和管理,实现生产计划、物料管
机械故障
如遇到机械故障,检查机械部件是否正常,润滑 是否良好,更换损坏的零部件。
电路故障
如遇到电路故障,检查电源、控制电路等,查找 故障点并修复。
软件故障
如遇到软件故障,重新启动控制系统、更新软件 等,进行调试和校准。
THANK YOU.
机器人的应用领域
工业制造
用于自动化生产线,提高生产效率 和产品质量,如焊接、装配、搬运 等。
三菱电机 菱耀 维修手册

三菱电机菱耀维修手册常见故障检修方法。
一、压缩机长时间运行,无自动停机现象。
故障原因1:制冷剂用量不足,制冷剂全部或部分泄漏。
故障排除:找出泄漏部位,补漏,重新抽真空制冷系统,加注制冷剂等,由专业人员维护。
原因2:过滤器堵塞。
故障排除:更换过滤器,重新抽真空制冷系统,添加制冷剂等,由专业人员维护。
二、压缩机不能工作。
原因1:电源故障。
故障排除方法:用万用表和电笔检查并排除故障。
如果保险丝断了,请更换保险丝;如果保险丝断了,请更换导线。
原因2:电源电压过低。
故障排除:使用万用表测量电压值,必要时使用电源调节器。
故障原因3:导线连接松动或断路。
故障排除:检查导线的连接部分。
松脱的接头应重新插牢,并由专业人员修理。
三、风扇不能工作。
原因1:主控开关接触不良。
故障排除:用万用表测量主控开关的接触电阻。
如果电阻过大或为零,则修理或更换。
原因2:风扇电机线圈损坏。
故障排除:用万用表检查并更换相同规格和转速的风扇电机。
故障原因3:风扇电机与风扇叶片之间的紧固螺钉松动。
解决方案:拧紧固定螺钉。
原因4:风扇电容器开路或短路。
故障排除:检查电容器,更换相同规格的电容器。
XX电机空调故障代码E1/E2/E3/E4/E5/E6...XX电机空调故障代码如下:E1 :操作开关线断,空内机电路板坏。
E2 :空内位置编号重复/空内板坏。
E3 :无对应的室外机号码内外信号线断。
E4 :室内机号定不正确(设了48 或49 )。
E5 :内外通信异常。
外机板坏。
E6 :室内机热交换器热敏电阻坏,内机板坏。
E7 :室内机吸气敏电阻坏,内机板坏。
E8 :室内机热交换器温度高(暖气),内机热交换器热敏电阻短路。
E10 :操作开关多台控制时次数过多。
XX电机空调故障代码E31~E40故障含义及检修E31:室外机编号重复,外部机板损坏。
E32:对相缺相,外板损坏。
E33:压缩机过流。
缺相,外部机板坏。
E34:52C的初级阶段缺乏T相。
E35:外机温度过高,外机热阻短路,外机短路。
三菱电梯各梯种看故障代码方法
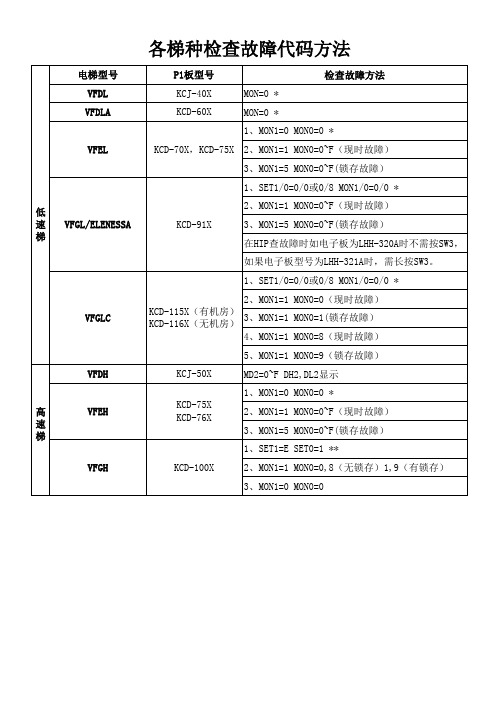
低 速 VFGL/ELENESSA 梯
KCD-91X
2、MON1=1 MON0=0~F(现时故障) 3、MON1=5 MON0=0~F(锁存故障) 在HIP查故障时如电子板为LHH-320A时不需按SW3,
如果电子板型号为LHH-321A时,需长按SW3。
1、SET1/0=0/0或0/8 MON1/0=0/0 *
* 故障代码
内容
0 无故障
1 TGBL 过低速检出
2 TGBH 过高速检出
3 TGBR 反方向运转检出
4 AST 检出
5 OCOK 过电流检出
6 OVLT 过电压检出
7 LVLT 低电压检出
8 CFLB LB拍OFF失效
9 CF5 5拍OFF失效
A CFBK 抱闸ON或OFF失效
B STSCE 传输至轿厢故障
6 安全回路 顺序故障
7 门故障
8 井道内开关故障
9 抱闸 曳引机故障
A 速度控制 选层器故障
B 秤装置故障
C P1板(AML,S/W)故障
D 系统设定故障
E 信号故障
F 预留
各梯种检查故障代码方法
电梯型号
P1板型号
检查故障方法
VFDL
KCJ-40X
MON=0 *
VFDLA
KCD-60X
MON=0 *
1、MON1=0 MON0=0 *
VFEL
KCD-70X,KCD-75X 2、MON1=1 MON0=0~F(现时故障)
3、MON1=5 MON0=0~F(锁存故障)
1、SET1/0=0/0或0/8 MON1/0=0/0 *
VFGLC
2、MON1=1 MON0=0(现时故障)
三菱 自动扶梯故障代码

错误代码表
错误代码错误内容解除方法E10速度异常检出进行错误清除操作
E11速度异常检出后运转信号不断开电源再接通后进行错误清除操作E20扶手滑动检出进行错误清除操作
E21扶手滑动检出后运转信号不断开电源再接通后进行错误清除操作E30扶手滑动复位模式设定值异常设定扶手滑动复位模式
E31扶手滑动持续时间设定值异常设定扶手滑动持续时间
E32扶手滑动监视开始时间设定值异常设定扶手滑动监视开始时间E33扶手滑动计测定值异常设定扶手滑动计测值
E34速度异常复位模式设定值异常设定速度异常复位模式
E35运转脉冲计测定值异常设定运转脉冲计测值
E40供油周期设定值异常设定供油周期
E41供油时间设定值异常设定供油时间
E50CPU错误再合上电源
E51CPU内部RAM W/R检查错误再合上电源
E52CPU内部ROM总和检查错误再合上电源
E53EEPROM占线计时器输出错误再合上电源
E54EEPROM写入许可错误再合上电源
E55EEPROM写入禁止错误再合上电源
E56EEPROM写入错误再合上电源
E58运转信号接通故障错误断开运转信号,再合上电源进行错误清除操作E59运转信号断开故障错误再合上电源后进行错误清除操作
监视器出错再合上电源•三菱自动扶梯故障代码。
天行自动化机械手故障排解
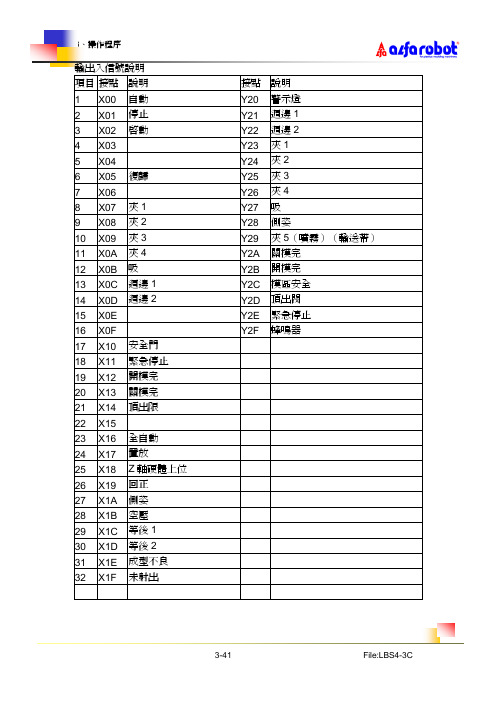
輸出入信號說明項目接點說明接點說明1 X00 自動Y20 警示燈2 X01 停止Y21 週邊13 X02 啟動Y22 週邊24 X03 Y23 夾15 X04 Y24 夾26 X05 復歸Y25 夾37 X06 Y26 夾48 X07 夾1 Y27 吸9 X08 夾2 Y28 側姿10 X09 夾3 Y29 夾5(噴霧)(輸送帶)11 X0A 夾4 Y2A 關模完12 X0B 吸Y2B 開模完13 X0C 週邊1 Y2C 模區安全14 X0D 週邊2 Y2D 頂出閥15 X0E Y2E 緊急停止16 X0F Y2F 蜂鳴器17 X10 安全門18 X11 緊急停止19 X12 開模完20 X13 關模完21 X14 頂出限22 X1523 X16 全自動24 X17 置放25 X18 Z軸硬體上位26 X19 回正27 X1A 側姿28 X1B 空壓29 X1C 等後130 X1D 等後231 X1E 成型不良32 X1F 未射出3.3.5. IMM信號可觀察IMM信號3.4. 自動3.4.1. 自動準備自動準備,機器會自動移至待機位置,可按<F1>:瀏灠程式內容,或按<F6> :自動啟動。
3.4.2. 自動瀏灠可瀏灠預執行自動運轉教導程式內容,可按<F9>觀看上一行,<F10>觀看下一行3.4.3. 自動運轉機器自動運轉,可修改計時、計數、速度及觀看I/O或按<EXIT>退出自動運轉。
3.4.4. 計時可修改已教導設定計時器編號內容,若未設定則無作用。
夾具ON/OFF延時計時器:可修改已教導設定夾具編號內容,若未設定則無作用。
週邊輸出ON/OFF計時器:可修改已教導設定週邊編號內容,若未設定則無作用。
3.4.5. 計數可修改計數值內容。
3.4.6. 速度速度設定:以百分比計算可修改所教導對應速度號碼修改設定參數內容3.4.7. I/O自動運轉可觀察I/O輸出入信號內容變化4. 故障排除4.1. 故障碼說明當發生故障時,機器立刻停止動作,排除可按<EXIT>或<RESET>作排除,並依據故障內容檢查故障點。
三菱报警查询-M70M700停止代码

三菱报警查询-M70M700停⽌代码加⼯中⼼维修
您的机床专属顾问
关注赠礼,配件折扣买
温馨提⽰
如遇表格显⽰不完整的情况,请横屏查看噢~
(⽆法横屏可在⼿机设置界⾯开启屏幕旋转)
∨
停⽌代码
三菱 M70/M700系列
控制器因某种原因⽽显⽰出停⽌状态。
(画⾯中以粗体字显⽰提⽰信息。
)
※ (1) 区分:T01 ⽆法⾃动启动
希望从停⽌状态执⾏⾃动运转时,显⽰处于⽆法执⾏⾃动运转的状态。
※ (2) 区分:T02 ⾃动启动休⽌
表⽰在⾃动运转中,因为某种条件⽽导致进⼊⾃动运转停⽌状态。
表⽰在⾃动运转中,执⾏了程序上的1 个单节之后,进⼊停⽌状态。
⾃动运动中,显⽰校准停⽌的状态。
显⽰在⾃动运转中,没有报警及任何问题的情况下所能看到的⼯作状态。
三菱电梯LEHY-III故障代码表
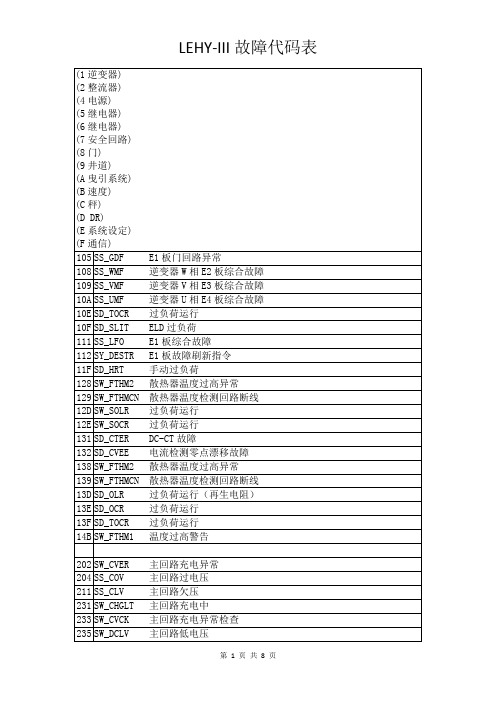
SS_MCP_D5 DR D5指令
D44
SS_MCP_D89 DR D89指令
D4A
SS_CCT10S CC_WDT屏蔽定时器动作
D4E
SS_CCWC2 CC_WDT2次
D4F
SS_CCWC1 CC_WDT1次
A31
SW_BKERNR 制动器异常
A39
SS_SWCH W2板未接
A3A
SS_BKE W2板异常
A3B
SW_JZER JZER故障
A3C
SW_UVWOFF UVW断相检测
A3D
SD_THNG 磁极未学习
A3E
SD_AZER PM Z相异常
A3F
SD_AEER F相异常
B01
SW_TGBL 过低速
B02
331
SS_WSF 整流侧W相E2板综合故障
332
SS_VSF 整流侧V相E2板综合故障
333
SS_USF 整流侧W相E2板综合故障
336
SF_PLLH E1板锁相环故障
33C
SW_CTHM2 散热器温度过高异常
33D
SW_CTHMCN 散热器温度检测回路断线
34C
SW_CTHM1 散热器温度过高警告
846
SW_DFFG12A 前门FG ON故障
847
SW_DFFG12B 前门FG OFF故障
848
SW_DRFG12A 后门FG ON故障
849
SW_DRFG12B 后门FG OFF故障
84A
SW_DFOLT12A 前门OLT ON故障
84B
SW_DFOLT12B 前门OLT OFF故障
84C
SW_DROLT12A 后门OLT ON故障
IAI机械手故障内容

信号为 OFF 状态)后再输入。 原因 :示教模式下,未完成原点复位时输入了写入当前位置信号
(PWRT)。 对策 :先输入 HOME 信号执行原点复位,确认原点复位完成(HEND
输出信号为 ON 状态)后再输入。 原因 :参数区域的数据输入范围不合理。
参数数据异常
位置数据异常
原因 / 对策 原因 :伺服 OFF 状态下通过数值指令输入了移动指令。 对策 :输入 SON 信号,接通伺服(SV 信号或 PEND 为 ON 状态)。
如果参数 No.21 为无效状态,发生本错误时,请联系本公司。 原因 :未完成原点复位时输入了位置移动指令。 对策 :输入 HOME 信号执行原点复位,确认原点复位完成(HEND 信
ࡘၤߙڵፑዏ ঐ٫ڵქၤ
0BA 原点传感器 未检出
0BE 原点复位超时
0C0 实际速度过大
ࡉၤ
原因 :移动途中变更速度时,发出下一移动指令的时间延迟。 对策 :提前切换的时间,避免超出软限位导致超出指令值。 表示在使用了原点确认传感器的驱动轴上,显示原点复位动作 未正常完成。 原因 :①原点复位途中工件与周围产生干涉。
154
代码
错误名称
0F4 PCB 不匹配
0F8 非挥发性存储器 损坏
0FA CPU 异常
0FB FPGA 异常
0FC 逻辑异常
原因 / 对策 本控制器的马达驱动回路因马达容量而异,因而通过印刷电路板(PCB) 进行分类贴片。 因此在启动时的初始处理中,应检查厂家参数中设定的马达种类与电路 板是否一致。 本错误表示此时不一致。 原因 :参数的输入错误或电路板的组装错误。 对策 :万一发生本错误时,请联系本公司。 启动时通过非挥发性存储器检查检测出异常数据。 原因 :①非挥发性存储器的故障。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 异警一览
1 异警一览
(1) 异警号码
当异常发生时,控制器正面操作面板的 STATUS NUMBER 上会显示 5 位数的异常号码 (例:“C0010”等), 同时 [RESET] 开关的灯号也会亮起。此外,示教单元上的显示 LCD 上也会有 4 位数的异常号码 (除去最前 面的英文字。例:C0010 的情况下,会显示 “0010”)和异常讯息。
A. 确认使用的方法能遵守法律的规则。
注意
示教作业等因安全的考虑,必须由受过操作教育训练的人员操作使用。 (无切断电力的保养作业亦相同) →安全教育的实施
注意
请将示教作业依机器人的操作方法及手顺、异常时及再起动时处理等编译相关作 业规程、并遵守规章内容。(无切断电力的保养作业亦相同) →作业规程的制作
* 禁止未经允许转载本手册的部份或全部内容。 * 本手册中的内容有可能变更修改,恕不另行通知。 * 本手册中的内容已尽量要求完整、如有错误误刊或遗漏项目,请向代理店或三菱电机 MELFA 电话
中心联络。咨询处记载于第 48 页的 「附录 2:技术支持」。 * 本规格书为原创手册。 * 以太网、ETHERNET 是富士施乐公司的注册商标。 * 其他被记载的公司名称、产品名称是各公司的商标或注册商标。
异警号码:H0001 1-1
1 异警一览
异警号码 H0009 * C0010 C0011 C0012 C0013 * H0014 * H0015 * L0016 * H0020 * H0021 * H0022 * L0030 L0031 H0039 H0040
异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策
危险 危险
在 CRnQ 使用对应 iQ Platform 产品的情况下,请勿在 PLC 上连接手编 GOT。 手编 GOT 会使机器人自动运行,无论操作权的有效/无效, 都可能发生物品及 人员损伤事故。
SSCNET III 接线取下后,若没有在 SSCNET III 接头部位装上护套的话,会使接 头附着灰尘及杂物。会使机器人特性变差、发生错误动作等。
危险 危险 注意
多重 CPU 系统及伺服驱动器的电源投入时,请勿拔除 SSCNET III 的接线。 请勿直视 MOTION CPU 及伺服驱动器的 SSCNET III 接头及 SSCNET III 电线前端 所发出的光。光线直射眼睛 , 会使眼睛产生失调感。 (SSCNET III 的光源相当于 J1SC6802、IEC60825-1 所规定的等级 1。 )
注意
运行开始,对于相关人员的信号有固定的方法,请依此进行。 →运行开始的信号
注意
维护作业原则上请中断电力进行、请将 [ 保养作业中 ] 的标语放置在起动开关上。 →维护作业中的表示
注意
作业开始前请详细的检查,确认机器人及紧急停止开关、相关装置等无异常状 况。 →作业开始前的检查
B. 摘录别册的 「安全手册」重点注意事项。 止运行的装置。 (无切断电力的保养作业亦相同) →紧急停止开关的设定
注意
示教作业中请将 [ 示教作业中 ] 的标示放置在起动开关上。 (无切断电力的保养作业亦相同) →示教作业中的表示
危险
运行中请确认使用围离或栅栏将操作人员与机器人做隔离,防止直接接触机台。 →安全栅栏的设置
*CR751-D 及 CR751-Q 控制器 以下说明基本结构的注意事项。
注意
为了漏电保护,应对 CR751-D 控制器或 CR751-Q 驱动单元的一次侧供应电源设置 漏电断路器。否则可能导致触电事故。
AC200V 端子盖板
漏电断路器 (NV)
CR7C5R17-5D 1控-D制控器制/C器R7/5C1-RQ75驱1动-Q单驱元动元件
三菱电机工业用机器人
CR750/CR751 控制器
操作说明书
障碍排除
本书记载对应 iQ Platform 机器人控制器 CR750-Q/751-Q 系列及控制器 CR750-D/751-D 系列的异警号码及原因、对策。
BFP-A8986
安全上的注意
使用机器人前请务必熟读以下的注意事项及别册 「安全手册」,了解如何使用机器人,以确保您及 周遭环境的安全。
表 1-1 中,显示异常号码所对应的讯息及发生的原因、对策。 根据发生的异常号码,在示教单元的 [ 异常履历 ] 画面中会有详细的讯息。 当异常复归后请至 [ 异常履历 ] 画面进行确认。若依照表中所指示的对策后仍然频频发生异常时,请向三菱 电机售后服务中心联络。
[ 注意 ]· 表 1-1 的异警号码的意义如下所示 □ 0000 * · 附有 * 号的异警表示电源必须重新启动的异警。请依照对策执行。 · 用 4 位数字表示异警的种类。 · 3 种类的异警区分如下所示。 H:高异警 ................ 伺服关闭。 L:低异警 ................ 停止动作。 C:警告 .................. 继续动作。
2 附录 ................................................................................ 附录 -43 附录 1.1 保险丝更换场所 ............................................................ 附录 -43 附录 1.2 发生故障与对策 ............................................................ 附录 -44 附录 2: 技术支持 .................................................................. 附录 -48
警告
请确保抓手、工具的取放及工件的抓握牢固。 否则运作中工件有可能飞散出去而造成人员及物品的损伤。
警告
机器人及控制器的接地请确实接续。 否则容易因为噪声而做错误动作或导致触电事故发生。
注意
机器人在动作中时请标示为运行状态。 没有标示的情况下容易导致人员接近或有错误的操作。
警告
在机器人的动作范围内做示教作业时,请务必确保机器人的控制有优先权。 否则由外部指令使机器人起动,有可能造成人员及物品的损伤。
注意
JOG 速度请尽量以低速进行、并请勿在操作中将视线离开机器人。 否则容易干涉到工件及周边装置。
注意
程序编辑后的自动运行前,请务必确认 step 运行动作。 若无确认有可能发生程序错误而与周边装置干涉。
注意
自动运行中安全栅栏的出入口门打开被锁住的情况下,机器人会自动停止。 否则会发生人员的损伤。
(3) 异警号码对应的内容及发生的原因、对策
发生的异警号码对应的内容及发生的原因、对策如表 1-1 所示。 注 ) 选购件中发生的异警内容记载于选购件的操作说明书。
请参照各自的操作说明书。
表 1-1:异警一览表
异警号码
H0001 H0002 H0003 H0004 *
异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策 异警讯息 原因 对策
注意
请勿因个人意思做机械的改造及使用指定以外的零件。 否则可能导致机械故障或损坏。
警告
从外部用手将机器人手臂做推动的情况下,请勿将手或指头放入开口部位。 有可能会夹伤手或指头。
注意 注意 危险
请勿用将机器人控制器的主电源关闭的方式来使机器人停止或紧急停止。 在自动运行中将控制器的主电源关闭有可能使机器人精度受到影响。 且 , 有可能发生手臂掉落或松动而干涉到周边装置的情况。
端子盖板
接地连接螺丝
连接器
保护接地端子 (PE)
修订记录
印刷日期 2013 年 4 月
第一版
修改内容
■序 感谢您购买三菱电机工业用机器人。 本操作说明书记载了使用机器人中,发生异警的情况下,异警发生的原因及对策。 发生异警时,请参照本书做适当的处理。 适用于对应 iQ Platform 的 CR750-Q/CR751-Q 控制器及独立设备型 CR750-D/CR751-D 系列控制器。 特别个别记载关于附加功能的异警,只有 “CR750-Q”或只有 “CR750-D”。 若依照表中所示的对策解决后仍然频频发生异警的情况下,请向附近的三菱电机售后服务中心联络。 联络地址已记载于本书及各操作说明书末尾。 此外,如有疑问,请咨询三菱电机 MELFA 电话中心。 咨询处记载于第 48 页的 「附录 2:技术支持」。 另外,本书已尽量记载了特殊操作,本书未记载的事项,则视为 “无法执行”的功能。
· 异警号码下一位显示的 “n”表示机器人的轴号码。 例 ) H0931J1 轴的电机过电流异警。
(2) 操作面板 (控制器 / 驱动模块)的标示熄灭时
控制器 (驱动模块)正面操作面板的标示熄灭时,请重启电源。 发生异警时,请参照 「表 1-1:异警一览表」采取对策。此外,未发生异常时也请确认异警一览表,采取必 要的措施。请参照别册的 「操作说明书 / 功能和操作的详细说明」确认异常履历。若采取对策后操作面板 的标示再次熄灭,请联络系统服务。
机器人控制器的电源投入时,请勿拔除 SSCNET III 的接线。 请勿直视 SSCNET III 接头及 SSCNET III 电线前端所发出的光。 光线直射眼睛,会使眼睛产生失调感。 (SSCNET III 的光源相当于 J1SC6802、IEC60825-1 所规定的等级 1。 )
请注意无配线错误。进行了规格以外的连接的情况下,可能造成无法解除紧急停 止等的误动作。 为了防止误动作,配线完成后,请务必确认控制器驱动单元操作面板紧急停止、 示教单元紧急停止、用户紧急停止、门开关等各种功能正常动作。