利用大地坐标计算真方位角的两种方法
坐标方位角计算
=(PI()*(1 - SIGN(B3-$B$1) / 2) - ATAN((A3-$A$1) /(B3-$B$1)))*180/PI() Excel 中求方位角公式:a1,b1放起始点坐标 a3,b3放终点坐标。 度分秒格式: =INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180/PI()) &"-"& INT( ((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180 /PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3-$b$1)))*180/ PI()))*60)&"-"&INT( (((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3- $b$1)))*180/PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) /(B3- $b$1)))*180/PI()))*60-INT(((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) / (B3-$b$1)))*180/PI()-INT((PI()*(1 - SIGN(B3-$b$1) / 2) - ATAN((A3-$a$1) / (B3-$b$1)))*180/PI()))*60))*600)/10 其中:A1,B1中存放测站坐标,a3,b3放终点坐标。 上面的计算出来的是度分秒格式,也就是字符串格式,不能用来计算,只是用来看的哟! 下面这个简单一点: =INT((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*180/PI())*10000+INT(((PI()*(1-S IGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*180/PI()-INT((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4) /(C6-C4)))*180/PI()))*60)*100+(((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*180/PI()-I NT((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*180/PI()))-(INT(((PI()*(1-SIGN(C6-C4)/ 2)-ATAN((B6-B4)/(C6-C4)))*180/PI()-INT((PI()*(1-SIGN(C6-C4)/2)-ATAN((B6-B4)/(C6-C4)))*1 80/PI()))*60))/60)*3600 Excel 中求方位角公式:a1,b1放起始点坐标 a3,b3放终点坐标。 求距离公式: =Round(SQRT(POWER((A3-$A$1),2)+POWER((B3-$B$1),2)),3)
计算坐标与坐标方位角的基本公式
二 计算坐标与坐标方位角的基本公式 控制测量的主要目的是通过测量和计算求出控制点的坐标,控制点的坐标是根据边长及方位角计算出来的。下面介绍计算坐标与坐标方位角的基本公式,这些公式是矿山测量工中最基本最常用的公式。 一、坐标正算和坐标反算公式 1.坐标正算 根据已知点的坐标和已知点到待定点的坐标方位角、边长计算待定点的坐标,这种计算在测量中称为坐标正算。 如图5—5所示,已知A 点的坐标为A x 、A y ,A 到B 的边长和坐标方位角分别为AB S 和AB α,则待定点B 的坐标为 AB A B AB A B y y y x x x ?+=?+= } (5—1) 式中 AB x ? 、AB y ?——坐标增量。 由图5—5可知 AB AB AB AB AB AB S y S x ααsin cos =?=? } (5—2) 式中 AB S ——水平边长; AB α——坐标方位角。 将式(5-2)代入式(5-1),则有 AB AB A B AB AB A B S y y S x x ααsin cos +=+= }
(5—3) 当A 点的坐标A x 、A y 和边长AB S 及其坐标方位角AB α为已知时,就可以用上述公式计算出待定点B 的坐标。式(5—2)是计算坐标增量的基本公式,式(5—3)是计算坐标的基本公式,称为坐标正算公式。 从图5—5可以看出AB x ?是边长AB S 在x 轴上的投影长度, AB y ?是边长AB S 在 y 轴上的投影长度,边长是有向线段,是在 实地由A 量到B 得到的正值。而公式中的坐标方位角可以从0°到360°变化,根据三角函数定义,坐标方位角的正弦值和余弦值就有正负两种 情况,其正负符号取决于坐标方位角所在的象限,如图5—6所示。从式(5—2)知,由于三角函数值的正负决定了坐标增量的正负,其符号归纳成表5—3。
104373_坐标方位角计算公式
坐标方位角计算公式(通用) 用极坐标法放样必须计算出测站点(仪器点)到放样点得距离和方位角,才能进行放样。 原计算公式为: S12=sqr( (x2-x1)2+(y2-y1)2)= sqr(△x221+△y221) A12=arcsin((y2-y1)/S12) S12为测站点1至放样点2的距离; A12为测站点1至放样点2的坐标方位角。 x1,y1为测站点坐标; x2,y2为放样点坐标。 按公式A12=arcsin((y2-y1)/S12)计算出的方位角都要进行象限判断后加常数才是真正的方位角。 新计算公式为: A12=arccos(△x21/S12)*sgn(△y21)+360° 式中sgn()为取符号函数,改公式只需加上条件(A12>360°, A12= A12-360°)就可以计算出坐标方位角,不需要进行象限判断。 我的这个公式要更好一些,计算结果就是正确结果: SGN是正负号的函数。括号内的数字大于零SGN()就是+号,反之就是-号。
===================================函数开始=================================== 'jiaodu10(x,splitStr)函数将60进制度转换为10进制度格式.x为度数,splitStr为分隔符号,'如x为43%67%367,则splitStr为"%",参数要用双引号括起来,jiaodu10("x","%") Function jiaodu10(x,splitStr) If InStr(1,x,splitStr) Then Dim s s=Split(x,splitStr) jiaodu10=s(0)+s(1)/60+s(2)/3600 Else jiaodu10="错误" End If End Function '-------------------------------------------------------------------------------- 'jiaodu60(x,splitStr)函数将10进制度转换为60进制度格式,splitStr分隔表示 'x为数字,可以不用双引号括起来,参数splitStr要用双引号括起来iaodu10(12.31313,"-") Function jiaodu60(x,splitStr) Dim fen,miao Fen =Round((fen-Int(fen))*60,0) If miao >= 60 Then miao = miao-60 fen = fen+1 End If jiaodu60=Int(x) & splitStr & Int(fen) & splitStr & miao End Function '-------------------------------------------------------------------------------- 'juli(待算点纵坐标x,待算点横坐标y,测站点纵坐标m,测站点纵坐标n)用于计算距离。 Function juli(x,y,m,n) juli=Math.Spr((x-m)^2+(y-n)^2) End Function '-------------------------------------------------------------------------------- 'jiaodu(x,y,m,n)计算角度 Function jiaodu(x,y,m,n) Dim dx,dy,a,jdu10 dx=x-m dy=y-m a=Math.Abs(Math.Atn(dy/dx) * 180 / 3.14159265) jdu10=0 If (dx > 0) Then If (dy > 0) Then jdu10 = a Else jdu10 = 360-a End If Else If (dy > 0) Then jdu10 = 180-a
已知两点坐标方位角
二 计算坐标与坐标方位角的基本公式 控制测量的主要目的是通过测量和计算求出控制点的坐标,控制点的坐标是根据边长及方位角计算出来的。下面介绍计算坐标与坐标方位角的基本公式,这些公式是矿山测量工中最基本最常用的公式。 一、坐标正算和坐标反算公式 1.坐标正算 根据已知点的坐标和已知点到待定点的坐标方位角、边长计算待定点的坐标,这种计算在测量中称为坐标正算。 如图5—5所示,已知A 点的坐标为A x 、A y ,A 到B 的边长和坐标方位角分别为AB S 和 AB α,则待定点B 的坐标为 AB A B AB A B y y y x x x ?+=?+= } (5—1) 式中 AB x ? 、AB y ?——坐标增量。 由图5—5可知 AB AB AB AB AB AB S y S x ααsin cos =?=? } (5—2) 式中 AB S ——水平边长; AB α——坐标方位角。 将式(5-2)代入式(5-1),则有 AB AB A B AB AB A B S y y S x x ααsin cos +=+= } (5—3) 当A 点的坐标A x 、A y 和边长AB S 及其坐标方位角AB α为已知时,就可以用上述公式计算出待定点B 的坐标。式(5—2)是计算坐标增量的基本公式,式(5—3)是计算坐标的基本公式,称为坐标正算公式。 从图5—5可以看出AB x ?是边长AB S 在x 轴上的投影长度,AB y ?是边长AB S 在y 轴上的投影长度,边长是有向线段,是在实地由A 量到B 得到的正值。而公式中的坐标方位角可以从0°到360°变化,根据三角函数定义,坐标方位角的正弦值和余弦值就有正负两种 情况,其正负符号取决于坐标方位角所在的象限,如图5—6所示。从式(5—2)知,由于
天线方位角俯仰角以及指向计算
创新实验课作业报告 姓名:王紫潇苗成国 学号:1121830101 1121830106 专业:飞行器环境与生命保障工程 课题意义:随着科学技术的迅猛发展,特别是航天科技成果不断向军事、商业领域的转化,航天科技得到了极大的发展,航天器机构朝着高精度、高可靠性的方向发展。因此对航天机构的可靠性、精度、寿命等要求越来越高,对航天器机构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在轨服务都对其精度有着严格的要求。航天器中的外伸指向机构通常指的是星载天线机构,星载天线是航天器对地通信的主要设备,肩负着对地通信的主要任务,同时随着卫星导航的广泛应用,星载天线就愈发的重要起来,而其指向精度的要求就愈发的突出,指向精度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。民用方面移动通信和车载导航等,军用方面舰船导航、精确打击等这些都对星载天线的指向精度有着极高的依赖性。 因此,星载天线的指向精度是非常重要的。要保证星载天线的指向精度,
课题一双轴驱动机构转角到天线波束空间指向 首先就是要确保星载天线驱动机构在地指向精度分析的正确性,只有这样才能对接下来的在轨指向精度分析和指向误差补偿进行分析。星载天线驱动机构的末端位姿误差主要来源于机构的结构参数误差和热变形误差,这些误差是驱动机构指向误差最原始的根源,由于受实际生产加工装配能力和空间环境的限制,这些引起末端指向误差的零部件结构参数误差是必须进行合理控制的,引起结构参数变 化的热影响因素是必须加以考虑的,只有这样才能使在轨天线驱动机构指向精度动态分析和误差补偿都得到较理想的结果。纵观整个星载天线驱动机构末端位姿误差的分析,提出源于结构参数误差和热变形误差引起的星载天线驱动机构末端位姿误差的研究是必要的。 发展现状:星载天线最初大多是以固定形式与卫星本体相连的,仅仅通过增大天线波束宽度和覆盖面积来提高其工作范围,对其精度要求不是很高,但是随着航天科技的不断发展和市场需求的不断变化,这就要求,星载天线要具备一定的自由度,因此促使了星载天线双轴驱动机构的发展。星载天线双轴驱动机构能够实现对卫星天线的二自由度驱动,是空间环境下驱动天线运动的专用外伸执行机构。卫星天线的二自由度运动能够满足对地通信、星间通信、卫星导航定位、以及对目标的实时观测跟踪,在满足这些需求的同时也要保证其精度的提高,随着需求的不断提高,精度已经成为衡量星载天线双轴驱动机构性能的一个重要指标,同时也是系统设计与实现的一个难点。综上所述可以看出,星载天线双轴驱动机构是驱动卫星天线系统进行准确空间定位的核心部分。 与此同时,我国对星载天线驱动机构的研究、生产制造技术进行了一定时间的学习积累,也成功的应用到了一些卫星上,具有一定的自主能力。自2000年后,我国在发射的卫星中,有很多采用了自主研发的天线驱动机构。相应的研究单位也蓬勃发展,航天科技集团、上海航天局等相关单位对星载天线驱动机构的研究已经取得了很大的成就和进展。特别是伴随着我国自主导航系统一北斗导航系统的不断发展,以及空间实验室和“嫦娥计划”的不断深入。星载天线双轴驱动机构得到了极大地发展。即便如此,我们跟国外还是有一定差距的,目前国内与国外的差距主要在双轴驱动机构精度、使用寿命、可靠性方面,因此还是需要进行深入研究,提高其精度、使用寿命、可靠性。 那么,我们小组也秉承着对航天事业的极大热忱开始对天线指向问题进行研
万能方位角计算公式
先计算出坐标增量: dX=Xb-Xa dY=Yb-Ya dY=dY+1E-10 为了使除数不为零而加一个很小的数 方位角计算万能公式:Az=pi * (1-Sgn(dY)/2)-Atn(dX / dY)单位为弧度 Az=Az * 180 /pi 单位为度 此公式计算无需判断象限,只需在值小于0时加上360即可! 其中,sgn()为求符号函数,若dX<0时其值为-1,dX>0时为1,dX=0时为0。使用此公式不用判断所在象限,直接将坐标增量代入即可求出方位角值,在用计算器编程时若没有SGN()函数可自行判断并用一个变量代替! VBA代码: '方位角计算函数 Azimuth() 'Sx为起点X,Sy为起点Y 'Ex为终点X,Ey为终点Y 'Style指明返回值格式 'Style=-1为弧度格式 'Style=0为“DD MM SS”格式 'Style=1为“DD-MM-SS”格式 'Style=2为“DD°MMˊSS""”格式 'Style=其它值时返回十进制度值 Function Azimuth(Sx As Double, Sy As Double, Ex As Double, Ey As Double, Style As Integer) Dim DltX As Double, DltY As Double, A_tmp As Double, Pi As Double Pi = Atn(1) * 4 '定义PI值 DltX = Ex - Sx DltY = Ey - Sy + 1E-20 A_tmp = Pi * (1 - Sgn(DltY) / 2) - Atn(DltX / DltY) '计算方位角 A_tmp = A_tmp * 180 / Pi '转换为360进制角度 Azimuth = Deg2DMS(A_tmp, Style) End Function '转换角度为度分秒 'Style=-1为弧度格式 'Style=0为“DD MM SS”格式
三种方位角之间的关系
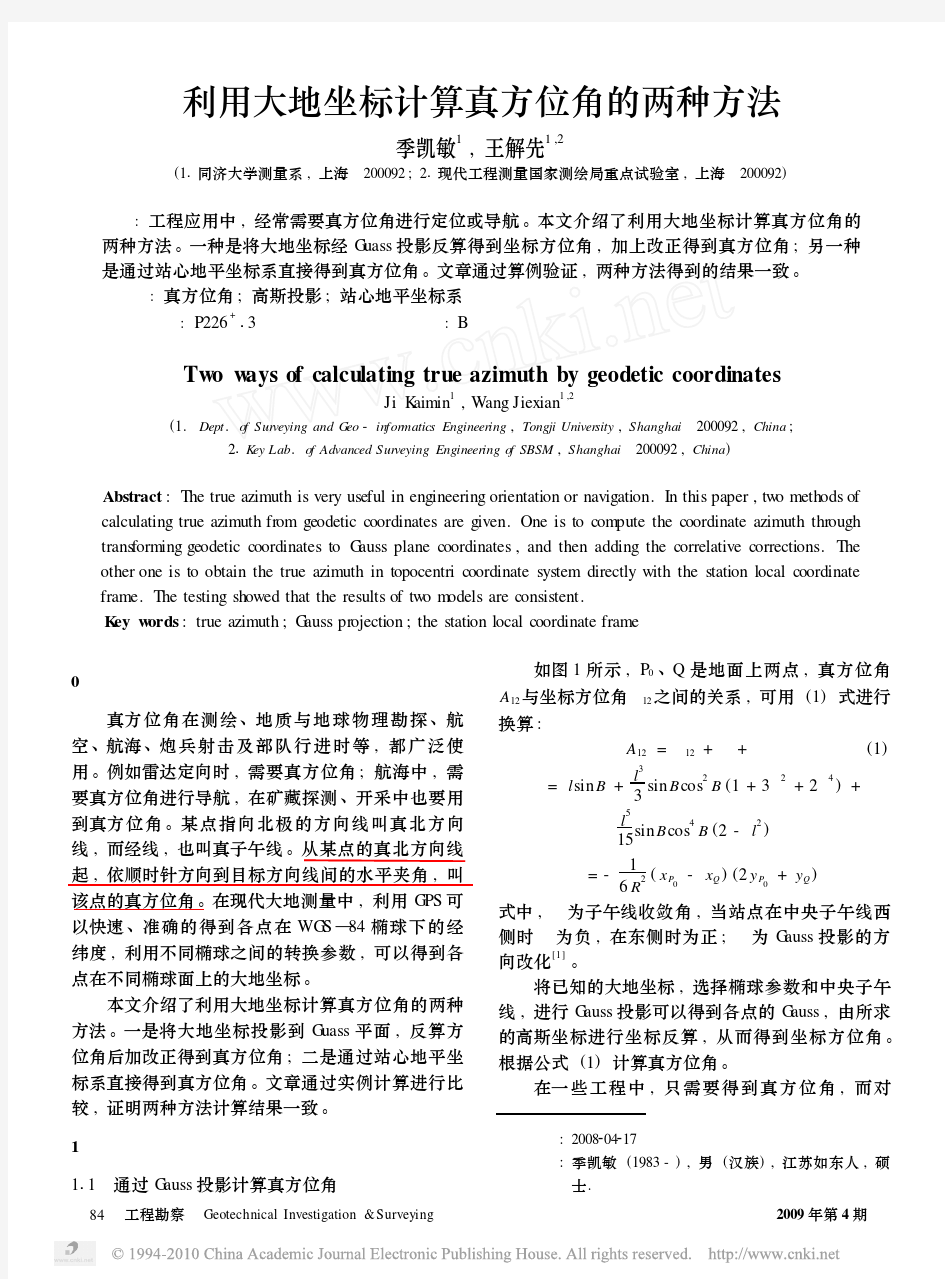
【方位角(azimuthangle)】从某点的指北方向线起,依顺时针方向到目标方向线之间的水平夹角,叫方位角。 (一)方位角的种类由于每点都有真北、磁北和坐标纵线北三种不同的指北方向线,因此,从某点到某一目标,就有三种不同方位角。 (1)真方位角。某点指向北极的方向线叫真北方向线,而经线,也叫真子午线。由真子午线方向的北端起,顺时针量到直线间的夹角,称为该直线的真方位角,一般用A表示。通常在精密测量中使用。 (2)磁方位角。地球是一个大磁体,地球的磁极位置是不断变化的,某点指向磁北极的方向线叫磁北方向线,也叫磁子午线。在地形图南、北图廓上的磁南、磁北两点间的直线,为该图的磁子午线。由磁子午线方向的北端起,顺时针量至直线间的夹角,称为该直线的磁方位角,用A m表示。 (3)坐标方位角。由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用α表示。方位角在测绘、地质与地 球物理勘探、航空、航海、炮兵射击及部队行进时等,都广泛使用。不同的方位 角可以相互换算。军事应用:为了计算方便精确,方位角的单位不用度,用密位作单位。换算作:360度=6000密位。 【三种方位角之间的关系】 因标准方向选择的不同,使得同一条直线有三种不同的方位角,三种方位角 之间的关系如图4-19所示。 A12 为真方位角,A m12为磁方位角,α12为坐标方位角。 过1点的真北方向与磁北方向之间的夹角称为磁偏角(δ),过1点的真北方 向与坐标纵轴北方向之间的夹角称为子午线收敛角(γ)。 真方位角A12=磁方位角A m12+磁偏角δ=坐标方位角α12+子午线收敛角γ α12=A m12+δ-γ(1) A12=A m12+δ(2) A12=α12+γ(3) (4) δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。 同一直线的三种方位角之间的关系为(注意在计算时带上δ和γ的符号): 坐标方位角和大地方位角的关系示意图
方位角的计算方法
方位角的计算方法:(已知方位角+水平角大于540°-540°)已知方位角+水平角±180°=方位角 坐标增量的计算方法: 平距×COS方位角=△X坐标增量 平距×Sin方位角=△Y坐标增量 坐标的计算方法: 已知X坐标±△X坐标增量=X坐标 已知Y坐标±△Y坐标增量=Y坐标 高差、平距的计算方法: 斜距×Sin倾角=高差 斜距×COS倾角=平距 高差÷Sin倾角=斜距 平距÷cos已知度分秒=斜距 高程的计算方法: 已知高程-仪器高+前视高±高差=该点的顶板高差 原始记录计算方法: 前视-后视相加÷2=水平角(前视不够-后视的+360°再减)后视 00°00′00″ 180°00′09″
前视92°49′02″272°49′13″水平角= 92°49′03″ 实测倾角:正镜-270°倒镜-90°(正、倒镜相加-360°)实例: 110°30′38″-90°= 00°30′38″ 实例: 270°30′38″-270°= 00°30′38″ 激光的计算方法:两点的高程相减: 比如:5点高程1479、479-4点高程1471、052 = 8、427 两点之间的平距:60、673×tan7°19′25″=7、798 8、427-7、797=0、629(上山前面的点一定高于后面的点,所以前面的点减后面的点) 测量:1、先测后视水平角:归零,倒镜180°不能误差15′ 2、前视:先测水平角并读数记录,然后倒镜测倾角,水平角、平距、斜距、高差、量出仪器高,前视量出前视高。 要求方位角-已知方位角±180°=拨角方位 画两千的图:展点用0.6正好. 倾角的计算方法:180°以下的-90° 270°-超过180°的 两点的高差除平距按tan=倾角
坐标计算方法
已知:①缓和曲线上任一点离ZH点的长度:l ②圆曲线的半径:R ③缓和曲线的长度:l0 ④转向角系数:K(1或-1) ⑤过ZH点的切线方位角:α ⑥点ZH的坐标:xZ,yZ 计算过程: 说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下: 当计算第二缓和曲线上的点坐标时,则: l为到点HZ的长度 α为过点HZ的切线方位角再加上180° K值与计算第一缓和曲线时相反 xZ,yZ为点HZ的坐标 切线角计算公式:
已知:①圆曲线上任一点离ZH点的长度:l ②圆曲线的半径:R ③缓和曲线的长度:l0 ④转向角系数:K(1或-1) ⑤过ZH点的切线方位角:α ⑥点ZH的坐标:xZ,yZ 计算过程: 说明:当曲线为左转向时,K=1,为右转向时,K=-1,公式中n的取值如下: 当只知道HZ点的坐标时,则: l为到点HZ的长度 α为过点HZ的切线方位角再加上180° K值与知道ZH点坐标时相反
xZ,yZ为点HZ的坐标 三、曲线要素计算公式 公式中各符号说明: l——任意点到起点的曲线长度(或缓曲上任意点到缓曲起点的长度)l1——第一缓和曲线长度 l2——第二缓和曲线长度 l0——对应的缓和曲线长度 R——圆曲线半径 R1——曲线起点处的半径 R2——曲线终点处的半径
P1——曲线起点处的曲率 P2——曲线终点处的曲率 α——曲线转角值 四、竖曲线上高程计算 已知:①第一坡度:i1(上坡为“+”,下坡为“-”) ②第二坡度:i2(上坡为“+”,下坡为“-”) ③变坡点桩号:SZ ④变坡点高程:HZ ⑤竖曲线的切线长度:T ⑥待求点桩号:S 计算过程: 五、超高缓和过渡段的横坡计算
坐标方位角计算实例
坐标方位角计算实例 在市政工程施工测量过程中,经常会遇到根据已知导线控制点,利用经纬仪、钢尺测设待定点的实际问题,解决此类问题往往需要计算坐标方位角或点位坐标,根据工作中实践体会将计算方法总结如下: 1 根据已知控制点计算坐标方位角,测设放样点平面位置(极坐标法) 首先明确方位角的概念,方位角是指从直线起点的标准方向北端开始,顺时针量到直线的夹角,以坐标纵轴作为标准方向的称为坐标方位角(以下简称方位角)。测量上选用的平面直角坐标系,规定纵坐标轴为x轴,横坐标轴为y轴,象限名称按顺时针方向排列(图1),即第Ⅰ象限x>0 y>0;第Ⅱ象限x<0 y>0;第Ⅲ象限x<0 y<0;第Ⅳ象限x>0 y<0,或许对于测量坐标系与数学坐标系的x、y 轴位置不同,象限规定不同,觉得难理解,其实能注意到测量上的平面直角坐标系与数学上的平面直角坐标系只是规定不同,x轴与y轴互换,象限的顺序与相反,因为轴向与象限顺序同时都改变,只要真正理解了方位角的定义,测量坐标系的实质与数学上的坐标系是一致的,因此数学中的公式可以直接应用到测量计算中。 1.1 按给定的坐标数据计算方位角αBA、αBP ΔxBA=xA-xB=+123.461m ΔyBA=yA-yB=+91.508m 由于ΔxBA>0,ΔyBA>0 可知αBA位于第Ⅰ象限,即 αBA=arctg =36°32'43.64" ΔxBP=xP-xB=-37.819m ΔyBP=yP-yB=+9.048m 由于ΔxBP<0,ΔyBP>0 可知αBP位于第Ⅱ象限, αBP=180o-α=180o-arctg=180o-13o27'17.33"=166°32'42.67" 此外,当Δx<0,Δy<0;位于第Ⅲ象限,方位角=180°+ arctg 当Δx>0,Δy<0;位于第Ⅳ象限,方位角=360°+ arctg 1.2 计算放样数据∠PBA、DBP ∠PBA=αBP-αBA=129°59'59.03" 1.3 测设时,把经纬仪安置在B点,瞄准A点,按顺时针方向测设∠PBA,得到BP方向,沿此方向测设水平距离DBP,就得到P点的平面位置。 2 当受地形限制不便于量距时,可采用角度交会法测设放样点平面位置 上例中,当BP间量距受限时,通过计算测设∠PAB、∠PBA来定P点
最新坐标正反算定义及公式
坐标正反算定义及公 式
第六章→第三节→导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算:
式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5",两点水平距离=200.416,计算点的坐标? 35o17'36.5"=1163.580 35o17'36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。如图6-6 可知,由下式计算水平距离与坐标方位角。 (6-3)
(6-4) 式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、=3712227.860、=523611.598,计算坐标方位角计算坐标方位角、水平距离。 =62°09'29.4"+180°=242°09'29.4" 注意:一直线有两个方向,存在两个方位角,式中:、 的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。
坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、=1719.24,试计算坐标方位角、水平距离 。 键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[], 键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。 【例题6-4】坐标正算,已知坐标方位角=294°42'51", =200.40,试计算纵坐标增量横坐标增量。 键入294.4251,转换为以度为单位按[DEG],按[]键输入,键入200.40,按[]键输入,按第二功能键[2ndF],按[]屏显,按[]屏显。 视力保护色: - 字体大小:大中小
方位角计算
三、三种方位角之间的关系 因标准方向选择的不同,使得一条直线有不同的方位角,如图4-19所示。过1点的真北方向与磁北方向之间的夹角称为磁偏角,用δ表示。过1点的真北方向与坐标纵轴北方向之间的夹角称为子午线收敛角,用γ表示。 δ和γ的符号规定相同:当磁北方向或坐标纵轴北方向在真北方向东侧时,δ和γ的符号为“+”;当磁北方向或坐标纵轴北方向在真北方向西侧时,δ和γ的符号为“-”。同一直线的三种方位角之间的关系为: δ+=m A A (4-14); γα+=A (4-15); γδα-+=M A (4-16) 四、坐标方位角的推算 1.正、反坐标方位角 2 图4-19 三种方位角之间的关系
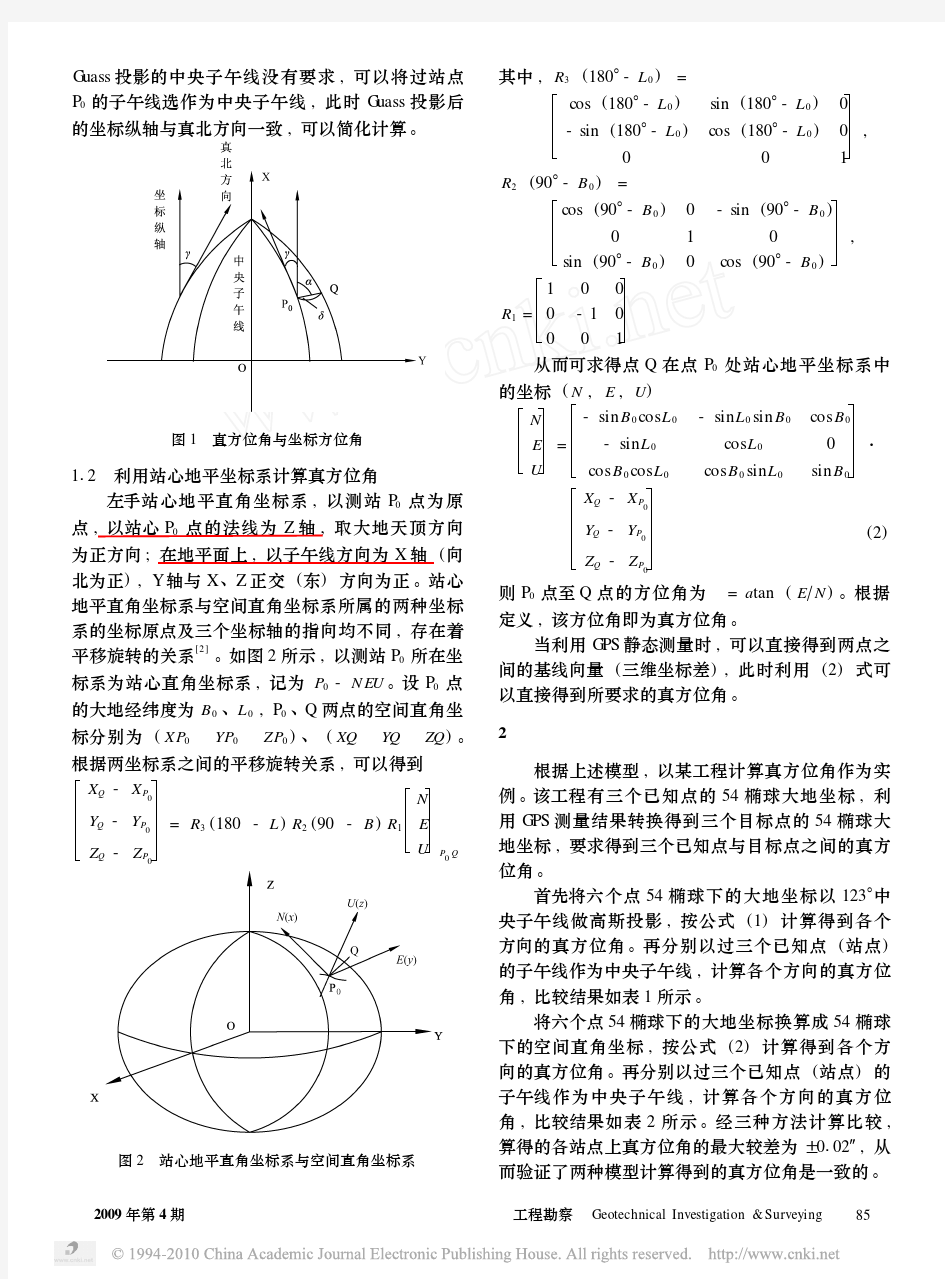
如图4-20所示,以A 为起点、B 为终点的直线AB 的坐标方位角αΑB ,称为直线AB 的坐标方位角。而直线BA 的坐标方位角αBA ,称为直线AB 的反坐标方位角。由图4-20中可以看出正、反坐标方位角间的关系为: ?±=180BA AB αα (4-17) 2.坐标方位角的推算 在实际工作中并不需要测定每条直线的坐标方位角,而是通过与已知坐标方位角的直线连测后,推算出各直线的坐标方位角。如图4-21所示,已知直线12的坐标方位角α12,观测了水平角β2和β3,要求推算直线23和直线34的坐标方位角。 y 图4-20 正、反坐标方位角
由图4-21可以看出: 21222123180βαβαα-?+=-= 32333234180βαβαα+?+=+= 因β2在推算路线前进方向的右侧,该转折角称为右角;β3在左侧,称为左角。从而可归纳出推算坐标方位角的一般公式为: 左后前βαα+?+=180 (4-18) 右后前βαα-?+=180 (4-19) 计算中,如果α前>360?,应自动减去360°;如果α前 <0?,则自动加上360?。 五、象限角 1 3 4 图4-21 坐标方位角的推算
坐标正反算定义及公式
第六章→第三节→导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5",两点水平距离=200.416,计算点的坐标? 35o17' 36.5"=1163.580 35o17' 36.5"=1115.793 2、坐标反算
已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。如图6-6可知,由下式计算水平距离与坐标方位角。 (6-3) (6-4) 式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、=3712227.860、=523611.598,计算坐标方位角计算坐标方位角、水平距离。 =62°09'29.4"+180°=242°09'29.4" 注意:一条直线有两个方向,存在两个方位角,式中:、的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、
方位角计算公式
一、直线定向 1、正、反方位角换算 对直线而言,过始点的坐标纵轴平行线指北端顺时针至直线的夹角是的正方位角,而过端点的坐标纵轴平行线指北端顺时针至直线的夹角则是的反方位角,同一条直线的正、反方位角相差,即同一直线的正反方位角 = (1-13) 上式右端,若< ,用“+”号,若,用“-”号。 2、象限角与方位角的换算 一条直线的方向有时也可用象限角表示。所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角, 用表示, 取值范围为。为了说明直线所在的象限, 在前应加注直线所在象限的名称。四个象限的名称分别为北东(NE)、南东(SE)、南西(SW)、北西(NW)。象限角和坐标方位角之间的换算公式列于表1-4。
表1-4 象限角与方位角关系表 象限角与方位角换算公式 = =- =+ =- 3、坐标方位角的推算 测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。 设地面有相邻的、、三点,连成折线(图1-17),已知边的方位角,又测定了和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17()所示,应有 =++ (1-14) 设三点相关位置如图1-17()所示,应有 =++-=+- (1-15) 若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式: =+(1-16) 显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式 =- (1-17) 上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。
坐标方位角
坐标方位角:以坐标纵轴的北端顺时针旋转到某直线的夹角 γ>0边线点坐标计算 曲率变化点坐标的计算 道路设计中,一般只给出了中线交点的坐标,如图1所示的i,j,k点的坐标及曲线参数,它们包括偏角γ,切线长T,缓和曲线长l0,曲线总长L,外距E及曲率半径R。测设前需根据上述设计参数求出ZH,HY,YH,HZ等曲率变化点的平面坐标,其中ZH和HZ点的坐标计算公式为 xZH=xj+Tcosαji (1a) yZH=yj+Tsinαji (1b) xHZ=xj+Tcosαjk (2a) yHZ=yj+T sinαjk (2b) 式中αji,αjk分别为j点至i点及j点至k点的坐标方位角。在图1所示的ZH-x′-y′假定坐标系中,HY点的坐标为〔1〕(3a) (3b) 则(4a) 4b) HY点的大地坐标为 xHY=xZH+SZH-HYcos(αij+R′ΖΗ-ΗY) (5a) yHY=yZH+SZH-HYsin(αij+R′ΖΗ-ΗY) (5b) 需注意的是,式(4b)仅要求为象限角,且R′ZH-HY是有符号的。如以 i→j→k为前进方向,本文定义偏角γ的符号为,相对于i→j方向,j→k 右偏角时γ>0,左偏角时γ<0。由图1不难看出,当γ>0时,式(3b)中的y′HY 取“+”号,故R′ZH-HY>0;而r<0时,式(3b)中y′HY取“-”号,故R′ZH-HY<0。可见,编程时可以通过γ的正负自动对y′HY取号。因缓和曲线ZH-HY 与缓和曲线HZ-YH是对称的,所以YH点的大地坐标为 xYH=xHZ+SZH-HYcos(αkj-R′ΖΗ-ΗY) (6a) yYH=yHZ+SZH-HYsin(αkj-R′ΖΗ-ΗY) (6b) 缓和曲线中线点与边线点的坐标计算 当曲线弧长l在区间(0,l0)取值时,中线点位于缓和曲线ZH-HY内。令C=Rl0,当γ>0时,距ZH点曲线长为l,缓和曲线中线上对应P点在ZH-x′-y′直角坐标系中的坐标为〔1〕(7a) (7b) 与P点相对应的缓和曲线边线点的坐标为〔2〕(8a) (8b) 式中:ρ=57.29577951,为弧度转换为度的系数;D为道路的半宽。当γ>0时,式(7b)取“+”号,当γ<0时,式(7b)取“-”号。当计算外边线点的坐
坐标计算公式.
坐标计算公式 1.坐标正算 用坐标正算计算测点X、Y坐标值(注意,全站仪测得的边长分水平距与斜距,坐标正算公式用的是水平距) 测点高程=测站高程+高差 坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。 编辑本段计算实例 实例1,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为: XB=XA+ΔXAB (5.1) YB=YA+ΔYAB (5.2) 式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。 根据三角函数,可写出坐标增量的计算公式为: ΔXAB=DAB·cosαAB (5.3) ΔYAB=DAB·sinαAB (5.4) 式中ΔX、ΔY的符号取决于方位角α所在的象限。 实例2. 已知直线B1的边长为125.36m,坐标方位角为211°07′53〃,其中一个端点B 的坐标为(1536.86 ,837.54),求直线另一个端点1的坐标X1,Y1。 解: 先代入公式(5.3)、(5.4),求出直线B1的坐标增量:ΔXB1=DB1·CosαB1=125.36×cos211°07′53〃=-107.31m ΔYB1=DB1·sinαB1=125.36×sin211°07′53〃〃=-64.81m 然后代入公式(5.1)、(5.2),求出直线另一端点1的坐标: X1=XB+ΔXB1=1536.86-107.31=1429.55m Y1=YB+ΔYB1=837.54-64.81=772.73m 坐标增量计算也常使用小型计算器计算,而且非常简单。如使用fx140等类型的计算器,可使用功能转换键INV和极坐标与直角坐标换算键P→R以及x←→y键。按键顺序为: D INV P→R α=显示ΔX X←→y 显示ΔY。
己知两点坐标手算方位角
一、坐标反算 坐标方位角:以坐标纵轴的北端顺时针旋转到某直线的夹角 γ>0边线点坐标计算 曲率变化点坐标的计算 道路设计中,一般只给出了中线交点的坐标,如图1所示的i,j,k点的坐标及曲线参数,它们包括偏角γ,切线长T,缓和曲线长l0,曲线总长L,外距E及曲率半径R。测设前需根据上述设计参数求出ZH,HY,YH,HZ等曲率变化点的平面坐标,其中ZH和HZ点的坐标计算公式为 xZH=xj+Tcosαji (1a) yZH=yj+Tsinαji (1b) xHZ=xj+Tcosαjk (2a) yHZ=yj+Tsinαjk (2b) 式中αji,αjk分别为j点至i点及j点至k点的坐标方位角。在图1所示的ZH-x′-y′假定坐标系中,HY点的坐标为〔1〕 (3a) (3b) 则 (4a) 4b) HY点的大地坐标为 xHY=xZH+SZH-HYcos(αij+R′ΖΗ-ΗY) (5a) yHY=yZH+SZH-HYsin(αij+R′ΖΗ-ΗY) (5b) 需注意的是,式(4b)仅要求为象限角,且R′ZH-HY是有符号的。如以i→j→k为前进方向,本文定义偏角γ的符号为,相对于i→j方向,j→k右偏角时γ>0,左偏角时γ<0。由图1不难看出,当γ>0
时,式(3b)中的y′HY取“+”号,故R′ZH-HY>0;而r<0时,式(3b)中y′HY取“-”号,故R′ZH-HY<0。可见,编程时可以通过γ的正负自动对y′HY取号。因缓和曲线ZH-HY与缓和曲线HZ-YH是对称的,所以YH点的大地坐标为 xYH=xHZ+SZH-HYcos(αkj-R′ΖΗ-ΗY) (6a) yYH=yHZ+SZH-HYsin(αkj-R′ΖΗ-ΗY) (6b) 缓和曲线中线点与边线点的坐标计算 当曲线弧长l在区间(0,l0)取值时,中线点位于缓和曲线ZH-HY内。令C=Rl0,当γ>0时,距ZH点曲线长为l,缓和曲线中线上对应P 点在ZH-x′-y′直角坐标系中的坐标为〔1〕 (7a) (7b) 与P点相对应的缓和曲线边线点的坐标为〔2〕 (8a) (8b) 式中:ρ=57.29577951,为弧度转换为度的系数;D为道路的半宽。当γ>0时,式(7b)取“+”号,当γ<0时,式(7b)取“-”号。当计算外边线点的坐标时,式(8a)、(8b)等号右边第二项前的符号分别取“+”、“-”号;当计算内边线点的坐标时,式(8a)、(8b)等号右边第二项前的符号分别取“-”、“+”号。 圆曲线中线点与边线点的坐标计算 建立图1所示的假定坐标系HY-x〃-y〃,设圆曲线上有任一点q,其对应的从HY点起算的圆弧长为l〃,则有微分关系式 (9a) (9b) 将上式分别在区间〔0,l〃〕上做定积分得 (10a) (10b) 当l〃=0时,与q点对应的外、内边线点有边界条件y〃=D,仿式(10)可以写出相应的边线点坐标为 (11a) (11b)
方位角计算公式
方位角计算公式 部门: xxx 时间: xxx 整理范文,仅供参考,可下载自行编辑
一、直线定向1、正、反方位角换算对直线 而言,过始点的坐标纵轴平行线指北端顺时针至直线的 夹角是的正方位角,而过端点的坐标纵轴平行线 指北端顺时针至直线的夹角则是的反方位角,同一 条直线的正、反方位角相差,即同一直线的正反方位 角= (1-13> 上式右端,若 <,用“+”号,若,用“-”号。 2、象限角与方位角的换算 一条直线的方向有时也可用象限角表示。所谓象限角是指从坐标纵轴的指北端或指南端起始,至直线的锐角,用表示,取值范围为。为了说明直线所在的象限,在前应加注直线所在象限的名称。四个象限的名称分别为北东
象限角与方位角换算公式 = =- =+ =- 3、坐标方位角的推算 测量工作中一般并不直接测定每条边的方向,而是通过与已知方向进行连测,推算出各边的坐标方位角。 设地面有相邻的、、三点,连成折线<图1-17),已知边的方位角,又测定了 和之间的水平角,求边的方位角,即是相邻边坐标方位角的推算。 水平角又有左、右之分,前进方向左侧的水平角为,前进方向右侧的水平角。
设三点相关位置如图1-17(>所示,应有 =++ (1-14> 设三点相关位置如图1-17(>所示,应有 =++-=+- (1-15> 若按折线前进方向将视为后边,视为前边,综合上二式即得相邻边坐标方位角推算的通式: =+(1-16> 显然,如果测定的是和之间的前进方向右侧水平角,因为有=-,代入上式即得通式 =- (1-17> 上二式右端,若前两项计算结果<,前面用“+”号,否则前面用“-”号。 二、坐标推算 1、坐标的正算 地面点的坐标推算包括坐标正算和坐标反算。坐标正 算,就是根据直线的边长、坐标方位角和一个端点的坐标, 计算直线另一个端点的坐标的工作。 如图1所示,设直线AB的边长DAB和一个端点A的坐 标XA、YA为已知,则直线另一个端点B的坐标为: XB=XA+ΔXAB YB=YA+ΔYAB 式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端
坐标正算反算公式讲解..
一 方位角: 在高斯直角坐标系中,由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a 表示。 1、第一象限的方位角 Y X 第一象限第二象限 第三象限 第四象限 o A a 图1 2、第二象限的方位角 Y X 第一象限 第二象限第三象限 第四象限 o A a 图2
3、第三象限的方位角 Y X 第一象限 第二象限 第三象限 第四象限 o A a 图3 4、第四象限的方位角 Y X 第一象限 第二象限 第三象限 第四象限 o A a 图4 方位角计算公式:
x =a -1 tan A Y O Y -A X O X - 方位角的计算器计算程序:Pol(X A -X O ,Y A -Y O ) 直线OA 方位角度值赋予给计算器的字母J ,0≤J <360。 直线段OA 的距离值赋予给计算器的字母I,I >0 直线OA 与直线AO 的方位角关系: 1、 当直线OA 的方位角≤180°时,其反方位角等于a+180°。 2、 当直线 OA 的方位角>180°时,其反方位角等于a-180°。 二 方位角的推算 (一)几个基本公式 1、坐标方位角的推算
或: 注意:若计算出的方位角>360°,则减去360°;若为负值,则加上360°。 例题:方位角的推算 已知:α12=30°,各观测角β如图,求各边坐标方位角α23、α34、α 45 、α51。 13 图5 解: α23= α12-β2+180°=30°-130°+180°=80°
α34= α23-β3+180°=80°-65°+180°=195° α45=α34-β4+180°=195°-128°+180°=247° α51=α45-β5+180°=247°-122°+180°=305° α12=α51-β1+180°=305°-95°+180°=30°(检查) 三坐标正算 一、直线段的坐标计算 o B D A C E a a p 图6 设起点O的坐标(X O,Y O),直线OP的方位角为F op,求A、C、E点的坐标 1、设直线段OA长度为L,则A点坐标为 X A=X O+L×Cos(F op) Y A=Y O+L×Sin(F op) 2、设直线段OB长度为L OB,直线段BC长度为L BC,则C点坐标为 X B=X O+L OB×Cos(F op)