车辆动力学(5)-系统动力学模型
车辆系统动力学pdf
车辆系统动力学
车辆系统动力学是汽车理论的一个重要研究方向,它主要研究汽车的动态性能,包括动力性、燃油经济性、操纵稳定性、形式平顺性和通过性等。
运用系统方法及现代控制理论,结合实例分析,可以对车辆动力学模型进行建立、计算机仿真、动态性能分析和控制器设计。
此外,汽车系统动力学也会讨论受汽车发动机、传动系统、制动系统影响的驱动动力学和制动动力学。
在研究中,汽车被视为一个动态系统,对其行为进行深入研究,讨论其数学模型和响应。
其目的是研究汽车受到的各种力以及这些力与汽车运动之间的相互关系,找出汽车主要性能的内在规律和联系,提出汽车设计参数选取的原则和依据。
同时,《汽车系统动力学》这本教材也提供了丰富的理论知识和实践应用案例。
系统动力学建模 PPT

因果关系图
因果图重要性
• 因果关系图在构思模型的初级阶段起着非 常重要的作用,它既可以在构模过程中初步 明确系统中诸变量间的因果关系,又可以 简化模型的表达,使人们能很快地了解系 统模型的结构假设,使实际系统抽象化和 概念化,非常便于交流和讨论。
流图法
• 流图法又叫结构图法,它采用一套独特的符 号体系来分别描述系统中不同类型的变量 以及各变量之间的相互作用关系。流图中 所采用的基本符号及涵义见图
国民经济流转模型方框问和交流
10
因果关系图法
• 在因果关系图中,各变量彼此之间的因果关系是 用因果链来连接的。因果链是一个带箭头的实线 (直线或弧线),箭头方向表示因果关系的作用方 向,箭头旁标有“+”或“-”号,分别表示两种极性 的因果链。
• a.正向因果链 A→+B:表示原因A 的变化(增或 减)引起结果B 在同一方向上发生变化(增或减)。
系统分析
• 这一步骤首先要对所需研究的系统作深入、广泛 的调查研究,通过与用户及有关专家的共同讨论、 交换意见,确定系统目标,明确系统问题,收集 定性、定量两方面的有关资料和数据,了解和掌 握国内外在解决类似系统问题方面目前所处的水 平、状况及未来的发展动向,并对前人所做工作 的长处与不足作出恰如其份的分析。对其中合理 的思想和方法要注意借鉴、吸收,对其中不足之 处要探究其原因,提出改进的设想。
模型的基本模块
• 根据系统动力学关于系统基本结构的理论, 任何大规模的复杂系统都可以用多个系统 基本结构按照特定的方式联结而成。系统 的基本模块是典型基本结构的形式,也是 由系统的基本单元、单元的运动以及单元 的信息反馈三大部分组成。
• 了解和掌握系统基本模块的性能、特性和 作用,有助于分析和构造系统模型,尤其 是分析和构造大规模复杂系统的模型。
第九章 机车车辆垂向动力学
3.
在共振点处,为使振幅不增加,必须使A激=A减
于是有 πkaZ t = πqZ t2 p ⇒q= ⇒D= ka k = pZ t pγ (Q γ = Zt ) a
q q k 1 1 = = = ( 与从运动学得出的公式 D = 比较) 2 2 qc 2 Mp 2 Mp γ 2γ 2 γ −1 上式在相对阻尼率D很小的情况下成立,因这里没有计入减振力本 身引起的挠度变化。
③当η < 2 时, ⇒ D ↑→ δ ↓ ,即阻尼增加,加速度下降(减小)。
19
结论四:对超临界速运行的机车车辆,D应选小一些,即D取0.2~ 0.25;而对亚临界速运行的机车车辆,D应选大一些,即D取0.3~ 0.4——主要目的是:减小动力作用(即减小振动加速度幅值)。
又 Q Zp 2 = δ (aω 2 ) ∴ 在同样的阻尼下, 自振频率愈低,则振动时车体的加速度愈小。
L vc ≈ 2 f0 (m / s )
1
④
可见:只要使机车车辆实际运行v<vc(亚 0 临界)或v>vc (超临界),就可以避免共振。
1
2
η
8
6. 共振建立过程
① 由方程的通解
z = A cos ωt + B sin ωt +
令初始条件t=0时,z=0,dz/dt=0 则可得:
a sin pt 2 1− ( p / ω)
12
••
•
13
A.
由此可得下述两个结论: 结论一:自振振幅 Ae − βt 随时间按等比级数衰减。 自振振幅随着时间增长而衰减,经过一个周期后,振幅比为:
Z t0
Ae − βt0 βT 2πβ / ω ' = =e =e − β ( t 0 +T ) Z t1 Ae
系统动力学九种模型

系统动力学九种模型标题:系统动力学九种模型:一种掌握复杂系统行为的有力工具引言:系统动力学是一门研究动态系统行为的学科,旨在通过模型和模拟来分析和预测系统的行为。
在系统动力学中,有九种常用的模型,它们分别从不同角度和层次探索和描述系统的行为。
本文将深入探讨系统动力学中的九种模型,并分享对这些模型的观点和理解。
第一部分:系统动力学简介与基本概念1.1 系统动力学的定义和应用领域1.2 动态系统和反馈环路的基本概念第二部分:系统动力学九种模型的介绍与分析2.1 流量模型:描述物质或信息在系统中的流动2.2 资源积累模型:描述资源的积累和消耗2.3 优先水平与延迟模型:描述不同的优先级和延迟对系统行为的影响2.4 饱和非线性模型:描述系统在达到饱和点后的行为变化2.5 非线性积分模型:描述系统内部非线性交互对整体行为的影响2.6 动态变化和叠加模型:描述系统多个变量之间的相互作用与叠加效应2.7 时滞模型:描述系统行为中存在的时间滞后和延迟2.8 分层模型:描述系统中的层次结构以及不同层次之间的相互作用2.9 非线性交互模型:描述系统中多个元素之间的非线性相互作用第三部分:系统动力学九种模型的应用案例分析3.1 商业经济领域中的应用案例3.2 环境与能源管理中的应用案例3.3 社会系统中的应用案例3.4 健康医疗领域中的应用案例第四部分:总结与回顾性内容4.1 对系统动力学九种模型的综合回顾4.2 对应用案例的总结与反思结论:系统动力学九种模型是一种有力的工具,能够揭示系统行为的本质和规律。
通过对这些模型的研究和应用,我们能够更深入地理解和预测复杂系统的行为。
在不同领域的实践中,系统动力学九种模型已经取得了许多成功的应用案例。
然而,我们也要意识到这些模型只是对现实世界的近似和抽象,对复杂系统行为的完整描述还需要我们的不断深入研究和探索。
(2000字)4.1 对系统动力学九种模型的综合回顾在前面的章节中,我们对系统动力学九种模型进行了详细的介绍。
汽车悬架系统动力学模型的研究
1 绪论随着社会的发展和文明的进步,汽车作为一种交通工具,已成为人们出行的主要选择,汽车乘坐的安全性、舒适性已成为世人关注的焦点。
汽车作为高速客运载体,其运行品质的好坏直接影响到人的生命安全,因此,与乘坐安全性、舒适性密切相关的轿车动力学性能的研究就显得非常重要。
悬架系统汽车的一个重要组成部分,它连接车身与车轮,主要由弹簧、减震器和导向机构三部分组成。
它能缓冲和吸收来自车轮的振动,传递车轮与地面的驱动力与制动力,还能在汽车转向时承受来自车身的侧倾力,在汽车启动和制动时抑制车身的俯仰和点头。
悬架系统是提高车辆平顺性和操作稳定性、减少动载荷引起零部件损坏的关键。
一个好的悬架系统不仅要能改善汽车的舒适性,同时也要保证汽车行驶的安全性,而提高汽车的舒适性必须限制汽车车身的加速度,这就需要悬架有足够的变形吸收来自路面的作用力。
然而为了保证汽车的安全性,悬架的变形必须限定在一个很小的范围内,为了改善悬架性能必须协调舒适性和操作稳定性之间的矛盾,而这个矛盾只有采用这折衷的控制策略才能合理的解决。
因此,研究汽车振动、设计新型汽车悬架系统、将振动控制在最低水平是提高现代汽车性能的重要措施[1][2]。
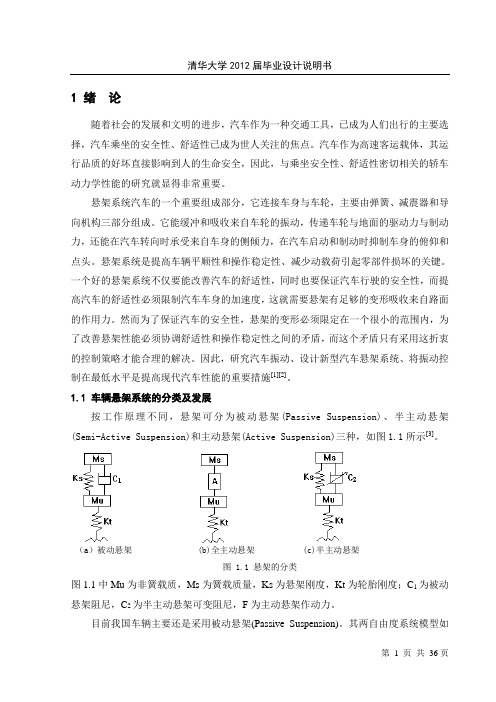
1.1 车辆悬架系统的分类及发展按工作原理不同,悬架可分为被动悬架(Passive Suspension)、半主动悬架(Semi-Active Suspension)和主动悬架(Active Suspension)三种,如图1.1所示[3]。
(a)被动悬架 (b)全主动悬架 (c)半主动悬架图 1.1 悬架的分类图1.1中Mu为非簧载质,Ms为簧载质量,Ks为悬架刚度,Kt为轮胎刚度;C1为被动悬架阻尼,C2为半主动悬架可变阻尼,F为主动悬架作动力。
目前我国车辆主要还是采用被动悬架(Passive Suspension)。
其两自由度系统模型如图1.1(a)所示。
传统的被动悬架一般由参数固定的弹簧和减振器组成,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,而且各元件在工作时不消耗外界能源,故称为被动悬架。
(完整版)系统动力学模型SD3

典型的变化率方程(构造复杂速率的基本单元):
LEVEL.K*CONST
LEVEL.K/LIFE
(GOAL.K-LEVEL.K)/ADJTM
LEVEL.K*AUX.K与LEVEL.K/AUX.K EFFECT.K+NORM.K(某些因素的影响作用+额定速率)
状态变量与Level方程 速率(变化率)方程 辅助方程 SD模型举例
5.1.1 状态变量与Level方程
状态变量是随时间而变化的积累量,是物质、能量与信息的储存环节。 如:人口、企业雇员人数、库存、生产能力、银行存款等。
状态变量的输入、输出变化率使积累量增加或减少。 L LEVEL.K=LEVEL.J+DT * (INFLOW.JK- OUTFLOW.JK)
期望雇员的阶跃增长时的外部特性
状态变量:去耦作用 它使连接的各辅助变量更加具有 独立性。 辅助变量:瞬变
结论:
若因果链中的变量值可随其输入量的变化而瞬变,则它们可定义 为辅助变量;若一变量经因果链的传递将改变其波形,则宜以状 态变量表示。
状态变量方程小结
状态变量环节能改变随时间变化的输入量的形状,能削弱输 入量与输出量之间的联系,使它们多多少少能独立变化,从 而使模型可能具备不平衡的动力学性质。
HFR=0,
WF=WFS
雇员的累积作用流图
Байду номын сангаас
• 突增WFS的特性经由状态变量WF 自身的积累变换,WF表现平滑指数增 长自寻的特性。
R HFR.KL=(WFS.K-WF.K)/WFAT
状态变量在回路中的作用
具有积累作用的状态变量环节有 改变其各种形式输入量特性(曲 线形状)的能力。
系统动力学建模
方框图
• 系统框图是一种极其简单的系统描述方法 方框图中只有方框和带箭头的实线两种符 号方框表示系统的元素、子系统或功能块 方框中填上相应的名称、功能或说明带箭 头的实线表示各元素、各子块之间的相互 作用关系、因果关系或逻辑关系也可以表 示流量的运动方向流量写在实线旁
公司模型方框图
国民经济流转模型方框图
因果关系图法
• 在因果关系图中各变量彼此之间的因果关系是用 因果链来连接的因果链是一个带箭头的实线直线 或弧线箭头方向表示因果关系的作用方向箭头旁 标有+或-号分别表示两种极性的因果链
• a.正向因果链 A→+B:表示原因A 的变化增或减 引起结果B 在同一方向上发生变化增或减
• b.负向因果链A→-B:表示原因A 的变化增或减 引起结果B 在相反方向上发生变化减或增
微分方程表达
根据动态守恒原理状态变量的变化速率等 于其输入率与输出率之差即设状态变量的 输入率与输出率分别是IR 和OR有
差分方程表达
• 系统的状态变化遵循着过去决定现在过去 和现在决定将来的时间因果律
• 系统目前的状态是在其一时刻状态的基础 上加上一个从旧状态向新状态过渡的转化 值即设时间间隔为△t有
• 在系统动力学构模过程中是相当关键的一环需要 经过理论分析、逻辑判断、历史经验参考再结合 各种技术方法上的技巧综合求得
辅助变量、外生变量
• 辅助变量的流图符号是一个圆圈内部填辅助变量 的名字由于速率方程函数关系的确定是一个比较 困难的过程因此有必要引入辅助变量对速率方程 进行分解以使得构模的思路更加清晰辅助变量是 为了构模方便而人为引入的信息反馈变量它是状 态信息变量的函数
重要性
• 流图法的特点是将系统中各变量按其不同的特征以及在系 统中所起的不同作用划分成不同的种类并用物质流线和信 息流线按照其特有的作用方式将它们联结起来组成系统的 结构所以流图法比因果关系图法更加详细地反映出系统内 部的反馈作用机制使人们对系统的构成有一个更加直观、 更加透彻的理解
8自由度模型
2.2.1车辆系统动力学模型结介实际问题研究的需耍,并充分考虑到制动系统仿真平台的延续性和扩展性, 木章建立了8自由度(午身4个自由度,车轮4个自由度)车辆系统动力学模型,如图2-1所示。
电机施加的能虽冋收制动力矩只牛用于前轮,模型在车辆坐标系下梵动力学方程可以描述为:加(人一乙©) = -///, - F曲,-F f- F X F - F lk〃K» + 儿血,)=+ J, + F vP + F注S =叫 h.m +『4」一(K^ + K、+刃諾力"+ l^0)r(2-5)21(2-6)(2-7)(2-8)图2-1混合动力乍俩榕隹动力孑仿眞模世(2-1) (2-2) (2-3) (2-4)J “Hi由 FR ~ Fj/fR■ - TbFN ~ TfFH -匚心2伊S T f ,/R, ( T fy [tl 滚动阻力模型求狗):= M 旳4 M 打+ M 沁+ M 林::口山电机及比控制系统模巾•求得;乙“山液压系统及制动器模型求得:令车辆质心处加速度分晴:《=(匕-气:a r =(匚+匕纠);则可得:叫h 儿7^ 叫--- + + (//+M # df车轮的侧偏角可以采用卜式计算心・呦:木文的研究「•作主耍是対混介动力汽仁电、液混合制动的纵向动力学特性进行分 析,因而研究的唾点放在r z i^纵向运动及仁轮的转动:但是本文所搭建的制动系 统动力学仿貞平台也可以满足对乍辆厳找稳足性控制及转向制动的研究需耍,这也 为木诔题后续的研究工作奥定了基础。
匕述公式屮上耍变量及参数的含义如卜•:下标:FL —农示左前轮;卜R —农示右询轮;KL —农示左麻轮;KR —衣示右后轮; 加一整肚质量:務找质量:〃%—谕轴非窝戏质量:〃心一后轴非賞技质量: 尸圧芒心—前、后轮胎总纵向力;5芒沖—前、后轮胎总侧向力;Fj —滚动阻力; /“/,-质心到询后轴的績离;乙,4—询后轮績;U-乍辆沿G •方向速度; 气一乍轮旋转角度速(i= F 、R 、j= L 、R ); 横摆角速度;/一榕乍质心高度; M zr — W 冋正力矩(等于四个车轮冋正力矩M 沁、“”M“M 亦乙和):^一前轮转向角(左前轮和右前轮转傑相同①二叭=5); j /—横摆角;〃,,〃,一分别绕乙x 轴力矩;F"“,、F“,一x 、y 方向的空气阻力;兮一迎风而枳; 码一滚动阴力矩U 二F 、R 、j = L 、e G —空气阻力系数;T“一电机制动力矩(7=1.2 ); J 四一车轮转动惯量(J=F 、R 、j=L 、Rh其中:心=心・0; 7环二K 前“; K 欢+K 护-叫h 、g 2“/+/,) "S 2"/ + 厶) 2(3) 2(//+厶) + △心: ma x h g 2(”). 曲/ 叫兀 A 厂 ・RR = ----- + ------------ + AA. 、2(/z +/) 2(/z +/J “儿一簧薮质量绕S轴的转动惯量以及绕Z/轴的惯件枳;力,一费我丿页罠质心到侧倾中心距离:力/一询轴侧倾中心距离地血高度:力「一后轴侧倾屮心距离地而高度;h nf—前轴卄货载质吊:质心距离地而高度:力M—斤轴非熒我质量质心距离地1加岛度;甲、®,—侧倾角和侧倾和速度;K转、K去-前后轴的侧倾角刚度:Q—制动力矩tF、R、jH、尸羽一地面垂直反作用力(7= =£./?):巴一车轮侧偏角Ji= F、R、j= L、R\:W—风速与行驶速度方向的夹角;沿X力向和¥方向的风速;«-车轮滚动半径:匕,心一非惯性坐标系下车辆质心处加速度分呈。
车辆系统动力学
2. 系统具有整体性
系统虽是由多种元素组成,但系统的性能不 是各元素性能的简单组合,而是相互影响的,所 以这种组合使系统的整体功能获得新的内容,具 有更高的价值。例如一辆汽车是由发动机、传动 系、车轮、车身、操纵系统组成。单有发动机只 能发出动力,不会自己行走,但当发动机装在具 有车轮的汽车底盘上,就成为可以行走的汽车, 成为一种交通工具,其功能就与一台发动机大不 相同。由此可见,研究系统特性应从整体的观点 来看。系统的性能是由其整体性能为代表,而不 是由某一个元素所能代替的。
4. 系统具有功能共性
系统中存在着物质、能量和信息的流动, 并与外界(环境)进行物质、能量和信息的交 流,既可以从外界环境向系统输入或从系统向 外界环境输出物质、能量和信息。这是任何系 统都具有的功能,称为系统的功能共性。如汽 车系统中把燃料的燃烧热能转换为汽车的行驶 动能,在这一过程中,发动机吸收氧气,而排 除废气。这一过程有能量的交流,也有物质的 交流。
第一章 绪论
• 1.1 系统与系统动力学的概念 • 1.2 汽车系统动力学的研究内容和特点 • 1.3 汽车系统动力学的研究方法
1.1 系统与系统动力学的概念
在我们真实的大千世界中,存在着许多由一组物 件构成,以一定规律相互联系起来的实体,这就是系 统,自然界就有太阳系、银河系这样的大系统,这种 系统是脱离人的影响而自然存在,称为自然系统,还 有如生物、原子内部也构成了自然系统,还有一种系 统是通过人的设计而形成的系统,称为人工系统,如 生产系统、交通运输系统、通信系统;人工组合和自 然合成的组合系统,如导航系统。 本文主要是研究人工的物理系统及其特性。 如果把汽车的构成看成是一大系统,那么这一系 统应表示为(如图1-1):
一个系统可能由若干个环节组成,画出各环节的 方框图,然后将这些方框图联系起来,就构成了系 统的方框图。因此,方框图是数学模型-传递函数 的图解化 。
车辆系统动力学解析
汽车系统动力学的发展现状仲鲁泉2014020326摘要:汽车系统动力学是研究所有与汽车系统运动有关的学科,它涉及的范围较广,除了影响车辆纵向运动及其子系统的动力学响应,还有汽车在垂直和横向两个方面的动力学内容。
介绍车辆动力学建模的基础理论、轮胎力学及汽车空气动力学基础之外,重点介绍了受汽车发动机、传动系统、制动系统影响的驱动动力学和制动动力学,以及行驶动力学和操纵动力学内容。
本文主要讲述的是通过对轮胎和悬架的系统动力学研究,来探究汽车系统动力学的发展现状。
关键词:轮胎;悬架;系统动力学;现状0 前言汽车系统动力学是讨论动态系统的数学模型和响应的学科。
它是把汽车看做一个动态系统,对其进行研究,讨论数学模型和响应。
是研究汽车的力与其汽车运动之间的相互关系,找出汽车的主要性能的内在联系,提出汽车设计参数选取的原则和依据。
车辆动力学是近代发展起来的一门新兴学科。
有关车辆行驶振动分析的理论研究,最早可以追溯到100年前。
事实上,知道20世纪20年代,人们对车辆行驶中的振动问题才开始有初步的了解;到20世纪30年代,英国的Lanchester、美国的Olley、法国的Broulhiet开始了车辆独立悬架的研究,并对转向运动学和悬架运动学对车辆性能的影响进行了分析。
开始出现有关转向、稳定性、悬架方面的文章。
同时,人们对轮胎侧向动力学的重要性也开始有所认识。
在过去的70多年中,车辆动力学在理论和实际应用方面也都取得了很多成就。
在新车型的设计开发中,汽车制造商不仅依靠功能强大的计算机软件,更重要的是具有丰富测试经验和高超主观评价技能的工程师队伍。
在随后的20年中,车辆动力学的进展甚微。
进入20世纪50年代,可谓进入了一个车辆操纵动力学发展的“黄金时期”。
这期间建立了较为完整的车辆操纵动力学线性域(即侧向加速度约小于0.3g)理论体系。
随后有关行驶动力学的进一步发展,是在完善的测量和计算手段出现后才得以实现。
人们对车辆动力学理解的进程中,理论和试验两方面因素均发挥了作用。