多变量FOPID-MAC在机炉协调控制中的应用
分数阶PID控制在电动变载荷加载系统中的应用

第27卷㊀第8期2023年8月㊀电㊀机㊀与㊀控㊀制㊀学㊀报Electri c ㊀Machines ㊀and ㊀Control㊀Vol.27No.8Aug.2023㊀㊀㊀㊀㊀㊀分数阶PID 控制在电动变载荷加载系统中的应用刘福才,㊀王海澎(燕山大学工业计算机控制工程河北省重点实验室,河北秦皇岛066004)摘㊀要:针对电动变载荷加载系统中存在的强耦合㊁加载过程中的多余力干扰㊁电机内部的高度非线性化和时变性等问题,为提高电动变载荷加载系统的动态性能和控制效果,将分数阶PID 控制器应用于电动变载荷加载系统中,该控制器较常规PID 多了2个可调参数,能更灵活地控制受控对象,采用Oustaloup 近似化方法对分数阶算子近似化处理,用改进惯性权重ω的粒子群优化算法对分数阶PID 控制器参数进行整定优化㊂选取不同加载压力的输出波形对电动变载荷加载系统模拟仿真并在电动变载荷摩擦磨损试验平台上进行加载试验,通过实验数据求出加载过程中的摩擦力㊁摩擦系数和加载压力的跟踪曲线与误差曲线图,然后和常规PID 对比㊂试验结果表明,分数阶PID 控制器抗干扰性强㊁跟踪精确度高,有更好的控制效果㊂关键词:电动变载荷加载系统;分数阶PID ;近似化;粒子群优化;加载压力;输出波形DOI :10.15938/j.emc.2023.08.010中图分类号:TM921文献标志码:A文章编号:1007-449X(2023)08-0091-09㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀收稿日期:2022-05-11基金项目:国家自然科学基金联合基金项目(U22A2050);河北省自然科学基金(F2022203043);省级重点实验室绩效补助经费项目(22567612H )作者简介:刘福才(1966 ),男,教授,博士生导师,研究方向为空间机构运动特性分析与控制技术;王海澎(1997 ),男,硕士研究生,研究方向为机电一体化机构设计与控制㊂通信作者:刘福才Fractional order PID control in an electric variable load loading systemLIU Fucai,㊀WANG Haipeng(Hebei Provincial Key Laboratory of Industrial Computer Control Engineering,Yanshan University,Qinhuangdao 066004,China)Abstract :Aiming at the problems of the strong coupling in the electric loading system,the surplus force interference during loading,and the highly nonlinear and time-varying inside the motor,to improve the dynamic performance and control effect of the electric loading system,the fractional order PID controller is used in electric variable load loading system.The controller has two more adjustable parameters than the conventional PID,and have more flexible control of controlled objects.The Oustaloup approximation method was used to approximate the fractional order operator and the parameters of the fractional order PID controller were rectified and optimised using a particle swarm optimisation algorithm with improved inertia weights.Simulation of an electric variable load loading system with selected output waveforms for different loading pressures and loading tests on an electric variable load friction and wear test rig were conducted.Plot of the tracking curve and error curve of the friction force,coefficient of friction and load-ing pressure during loading were derived from experimental data,and then compared with conventional PID.The experimental results show that the fractional order PID controller is more resistant to disturb-ances,and has high tracking accuracy and good control effects.Keywords :electric variable load loading systems;fractional order PID;approximation;particle swarmoptimization;loading pressure;output waveform0㊀引㊀言摩擦与磨损是生活中普遍存在的问题,在机器或是装备的运行中,相互接触的零部件之间的摩擦磨损现象是不可避免的㊂它会造成机械能损耗㊁产生噪音,对零部件造成变形㊁摩擦,影响其寿命[1]㊂摩擦磨损试验机是实现对一种特性材料在给定的条件下对摩擦磨损性能的探究,并能求得摩擦力与摩擦系数的模拟试验机㊂摩擦磨损试验机的出现对生产中减少能源损耗㊁提高生产效率等方面起着重大作用㊂然而研究摩擦磨损试验机的关键是对加载压力的控制,目前试验机主要存在机械㊁气动和电动3种加载形式[2]㊂随着电机制造水平和控制技术的不断提高,以电机作为驱动力的电动加载技术逐渐成为时代潮流㊂相比于机械式加载控制精确度低㊁无法实现变载荷加载和气动式存在空气可压缩性㊁气体流动的复杂性等问题,电动加载技术具有加载精确度高㊁跟踪速度快㊁结构简单㊁成本较低等优点㊂但电动加载系统存在强耦合㊁电机内部的高度非线性化以及加载过程中的多余力干扰等问题㊂为解决以上问题,更好地实现电动加载系统的控制性能,诸多学者对其进行了研究㊂文献[3]提出基于结构不变性原理,实验结果表明引入舵机的轴角速度作为前馈补偿后,能够有效地减小电机多余力矩的干扰㊂文献[4]构造了小脑模型神经网络(cerebellar model articulation controller,CMAC)与模糊控制相结合的复合控制方法,提高了系统的稳定性和鲁棒性㊂文献[5]提出了一种以速度闭环㊁转矩闭环以及位置闭环补偿的复合控制策略,其中转矩闭环采用模糊自适应PID控制算法㊂通过实验,复合控制方法在保证了加载精确度和动态性能的前提下,具有很强的鲁棒性和抗扰性㊂文献[6]采用自抗扰控制对四旋翼无人机在受到内部参数以及外部环境干扰的前提下进行测试,结果表明,所用的自抗扰控制算法有效地降低了外来干扰,提高了系统的准确性㊂上面涉及的几种控制算法虽然能有效地降低干扰性,起到不错的控制效果,但其存在控制器设计繁琐,推导计算量大等问题,因此本文采用分数阶PID控制(fractional order PID,FOPID),FOPID控制结构简单㊁易于理解㊁应用方便,较普通PID控制多了2个自由度[7-8],进一步扩大了参数整定范围,提升了控制能力和控制精确度,使其具有更好的动态性能和鲁棒性,提高了控制效果㊂1㊀试验机加载系统模型分析1.1㊀加载系统原理试验机的加载系统主要由伺服电机及其驱动器㊁压力传感器㊁电动缸㊁摩擦压头和样品台组成㊂其中压力传感器内置于电动缸中,装置示意图如图1所示,工控机通过PCI-1710U板卡对压力传感器产生的压力信号进行采集,将采集到的压力信号利用所编写好的程序代码进行数据去值滤波处理并同给定的期望输入信号做差求得误差信号㊂然后将误差信号经过分数阶PID控制算法所产生的输出信号经过转换后通过PCI-1720U模拟量输出卡发送-10V到+10V的转矩指令作用于伺服电机驱动器,伺服电机驱动器接到转矩指令后驱动伺服电机进行旋转运动,伺服电机通过丝杠将其旋转运动转化为电动缸竖直方向的直线运行,从而实现摩擦压头对样品台的加载试验㊂图1㊀电动加载系统实验装置示意图Fig.1㊀Schematic diagram of the experimental setup of the electric loading system1.2㊀加载系统数学模型伺服电机的电压平衡方程为U=iR+L d i d t+E㊂(1)电机电枢反电动势为E=K eω㊂(2)电机的转矩平衡方程为T m=J dωd t+Bω+T L㊂(3)电磁转矩可表示为T m=K T i㊂(4)式中:U为电机电枢电压;i为电机电流;R为电枢29电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀纽回路总电阻;E 为电枢反电动势;K e 为电机反电动势系数;ω为电机旋转角速度;T m 为电动机电磁转矩;J 为转动惯量;B 为电机阻尼系数;T L 为电机轴输出转矩;K T 为电动机转矩系数㊂由式(1)~式(4)可知伺服电机模型传递函数为G 0(s )=K TLJs 2+(LB +RJ )s +BR +K e K T㊂(5)由文献[9]电动缸输出轴直线位移为:y =θh 2π;θ(t )=ʏtω(t )d t ㊂üþýïïïï(6)压力传感器模拟输出值为F =K f y ㊂(7)式中:h 为滚珠丝杠导程;K f 为压力增益㊂由式(5)~式(7)得试验机加载系统开环传递函数为G (s )=K T K f h2π[LJs 3+(LB +RJ )s 2+(BR +K e K T )s ]㊂(8)1.3㊀加载过程中摩擦力与摩擦系数的获取本试验机摩擦力的获取采用间接测量方法,首先将传动系统中的伺服电机以60r /min 的转速带动样品台空载运行,获得其电机空载转矩T 0,然后加载系统进行加载试验,获得电机在力加载情况下的输出转矩T ,并由游标卡尺测量加载压头距样品台旋转中心的距离R ,则加载过程中的摩擦力f 和摩擦系数μ可以表示为:f =T -T 0R;μ=f F N ㊂üþýïïïï(9)式中F N 为加载压力㊂2㊀分数阶PID 控制器2.1㊀控制器设计FOPID 是由Podlubny 最早提出的[10],其在继承了传统PID 控制的基础上新增了积分阶次和微分阶次两个可调参数,增加了控制器的调节范围,改善了控制器的性能㊂其结构框图如图2所示㊂FOPID 微分方程表达式为u (t )=K p e (t )+K i D -λe (t )+K d D μe (t )㊂(10)式中:u (t )为控制器输出;e (t )为控制器输入;λ和μ为控制器的积分阶次和微分阶次;K p ㊁K i ㊁K d 为控制器增益参数㊂图2㊀FOPID 控制器结构框图Fig.2㊀Block diagram of the FOPID controller structure控制器传递函数为C (s )=K p +K i s -λ+K d s μ㊂(11)当λ和μ取不同值时,可以得到分数阶PID 控制器的不同形式,如图3所示㊂由图可知,整数阶PID 控制器只是分数阶PID 控制器λ和μ取值为0或1的4个特殊点,因此分数阶PID 参数整定范围更大,控制更加灵活,能更好地调节系统的动态性能,达到最佳的控制效果㊂图3㊀λ、μ参数取值图Fig.3㊀Diagram of the values of the λand μparameters2.2㊀分数阶PID 控制系统稳定性分析一般来说,对于任何控制系统要稳定的充要条件是特征方程根位于S 平面的左半面,但是分数阶系统的稳定性不同于整数阶,由Matignon 的稳性定理可知,一个稳定的分数系统可能在S 平面的右半部分有根㊂下面进行稳定性详细分析[11]:一般分数阶系统特征方程为α0s β0+α1sβ1+ +αn sβn=ðni =0αi s βi=0㊂(12)将βi =v iv,α=s 1v 代入式(12)得39第8期刘福才等:分数阶PID 控制在电动变载荷加载系统中的应用ðni =0αi sv iv=ðni =0αi σv i ㊂(13)由上式可知,通过代数转换将S 平面的分数阶系统特征方程转化为σ平面的整数阶系统形式,从而能够间接使用劳斯判定准则判定系统稳定的充要条件为π2v <|arg(σ)|<πv㊂(14)将得到的分数阶系统稳定性区域和传统整数阶系统的稳定性区域做比较,如图4所示,可以看出,分数阶控制系统的稳定区域比整数阶控制系统的稳定区域范围要广,更加灵活可控㊂图4㊀控制区域稳定示意图Fig.4㊀Control area stabilisation schematic2.3㊀实现方式由于分数阶微积分算子是一个复变量s 的无理化函数,其特征方程一般来说不是常规的多项式,在数值仿真与实际应用中不能够直接应用,因此用一个有限的微分方程来近似是分数阶微积分算子数字实现的关键[12]㊂本文采用Oustaloup 近似化方法[13],假定选定拟合频率段为(ωb ,ωh ),其近似的有理传递函数模型为G (s )=K ᵑNk =-N s +ωᶄks +ωk㊂(15)其中:ωᶄk =ωbωhωb()k +N +12(1-γ)2N +1;ωk =ωb ωhωb ()k +N +12(1+γ)2N +1;K =ωγh ㊂üþýïïïïïïï(16)式中:γ为分数阶阶次;2N +1为近似化次数㊂2.4㊀控制器参数整定由于分数阶PID 控制器多了2个可调参数,使得控制器的控制更加灵活,但是也给分数阶PID 控制器的参数整定造成了困难,只有合理地选择参数才能达到更理想的控制效果㊂本文将粒子群优化算法用于分数阶PID 控制器中,以此对控制器参数进行优化整定㊂粒子群优化算法(particle swarm opti-mization,PSO)是1995年由Eberhart 和Kenney 通过模拟鸟类捕食行为而提出的一种群体智能优化算法[14]㊂在一个D 维目标搜索空间中,有N 个粒子组成一个粒子群体,第i 个粒子的位置和速度为x i =(x i 1,x i 2, ,x iD )和v i =(v i 1,v i 2, ,v iD ),该粒子在整个搜索过程中所经历的最优位置称为个体极值p best =(p i 1,p i 2, ,p iD ),粒子群体目前搜索的最优位置称为全局极值g best =(p g 1,p g 2, ,p gD ),在迭代过程中粒子通过自身的个体极值和群体的全局极值来更新自己的速度和位置,直到满足设定好的迭代终止条件,得出最优解并引用适应度函数作为评价因子,具体更新公式如下:v k +1id =ωv k id +c 1r 1(p k id -x k id )+c 2r 2(p k gd -x k id );x k +1id =x k id +v k +1id ㊂}(17)式中:i =1,2, ,N 为粒子数;d =1,2, ,D 为向量维数;k 为当前迭代次数;c 1,c 2为非负的权重系数;r 1,r 2是分布于[0,1]区间的随机数;ω为惯性权重因子,用来调节算法的全局和局部搜寻能力㊂一个较大的惯性权值有利于全局搜索,而一个较小的惯性权值则更利于局部搜索㊂通常取权重系数ωmax =0.9,ωmin =0.4时算法性能最好,在合理的迭代次数里寻找全局最优值能力较好,所需迭代次数最少[15]㊂惯性权重由0.9递减至0.4,迭代初期保持了较强的全局搜索能力,而迭代后期有利于算法进行更精确的局部搜索㊂目前常采用ω惯性权重公式为ω=ωmax -t (ωmax -ωmin )t max㊂(18)式中:t max 为最大迭代次数;t 为当前迭代次数㊂虽然该方法让惯性权重不再是一个固定值,使得迭代过程中前期全局搜索能力增强,后期局部搜索能力增强,但惯性权重的变化率是固定值,可能会在较强的搜索条件下不能更好寻求最优值㊂本文在49电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀上式以及文献[16]的启发下,对惯性权值进行改进,令:ω=ωmax (1-a 3)+ωmin rand a 3;a =t t max ㊂}(19)改进之后惯性权重变化率不再是固定的,引入rand 函数体现了粒子群搜索过程的随机性㊂在粒子群的搜索初期,ω变化较慢,取值较大,加大了粒子的全局搜索能力;后期ω变化较快取值较小,提高了局部搜索能力,这样利于算法跳出局部最优而求得最优解,提高了算法的求解精确度㊂适应度函数选用ITAE 积分评价函数[17],即ITAE =ʏɕt |e (t )|d t ㊂(20)式中e (t )为误差㊂3㊀实验验证为了更进一步地探究分数阶PID 控制在实际系统中的控制效果,在电动变载荷摩擦磨损试验机平台上进行加载实验,分别采用恒值㊁三角波㊁方波㊁正弦波4种不同的典型信号作为加载系统载荷的期望跟踪曲线,实验平台如图5所示㊂分别在样品台静止和旋转时进行加载试验,样品台旋转相当于对加载系统在加载实验时引入了外部干扰㊂实验中设定传动系统中的伺服电机以60r /min 的转速带动样品台进行旋转实验,并通过工控机实时读取并储存加载实验数据,由旋转伺服电机转矩值及电动缸加载的压力值求得加载过程中的摩擦力和摩擦系数,并通过数据进行绘制相应曲线的加载载荷跟踪曲线㊁误差跟踪曲线和摩擦力与摩擦系数曲线㊂图5㊀电动变载荷加载系统实验装置示意图Fig.5㊀Schematic diagram of the experimental setup ofthe electric variable load loading system3.1㊀恒值加载图6为在加载实验载荷F =100N 的恒值信号下样品台在静止时和旋转时加载压力的跟踪曲线及误差曲线图㊂图6㊀恒值加载实验曲线图Fig.6㊀Experimental graph for constant value loading59第8期刘福才等:分数阶PID 控制在电动变载荷加载系统中的应用由图6可知,分数阶PID 控制较传统PID 控制反应速度快㊁超调量小,在有外部干扰的情况下,FOPID 能更好地减小系统的振荡,保证系统的稳定性㊂图7为在不同恒值力加载实验条件下摩擦力与摩擦系数曲线图㊂图7㊀恒值下摩擦力与摩擦系数曲线图Fig.7㊀Friction and friction coefficient graphs可以看出,恒值力越大,加载过程中的摩擦力越大,摩擦系数越小,曲线走势和压力跟踪曲线类似㊂3.2㊀三角波加载图8为加载载荷信号幅值F =50N,周期T =6s 的三角波信号下样品台在静止和旋转时的压力跟踪曲线及误差曲线㊂由图8可知,在三角波加载条件下,曲线振荡相对较大,FOPID 控制在曲线的尖端突变处的误差相对较小,曲线跟踪效果优于PID 控制㊂图9为三角波信号在不同幅值力加载过程中的摩擦力与摩擦系数曲线图㊂从图中可知,摩擦力曲线与加载力的跟踪曲线类似,加载力越大摩擦力就越大,摩擦系数的变化相对平稳,只在加载力曲线最底端发生突变㊂3.3㊀方波加载图10为输入加载载荷信号幅值F =100N,周期T =6s 的方波信号下样品台在静止和旋转时的压力跟踪曲线及误差曲线图㊂图8㊀三角波加载实验曲线图Fig.8㊀Experimental graph of triangular wave loading69电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀图9㊀摩擦力与摩擦系数曲线图Fig.9㊀Friction and friction coefficientgraphs图10㊀方波加载实验曲线图Fig.10㊀Experimental graph of square wave loading由图10可以看出,曲线在突变处具有一定的滞后性,FOPID控制的超调量比传统PID控制小,响应速度快,在引入外部干扰后,曲线的误差变大,但FOPID仍能展现良好的跟踪效果㊂图11为方波信号在加载力幅值不同时加载过程中的摩擦力与摩擦系数曲线图㊂由图可知,摩擦力在波形突变处变化较大且摩擦系数在信号发生阶跃突变处变化较剧烈,从侧面反映出加载力跟踪在突变处较为振荡㊂3.4㊀正弦波加载图12为输入加载载荷信号幅值F=200N,周期T=6s的正弦信号下样品台在静止和旋转时的压力跟踪曲线及误差曲线㊂由图可知,在传统PID控制下曲线在峰值处出现了明显的滞后性;在引入外部干扰后,曲线误差虽然变大,但FOPID控制的曲线较为光滑平稳,误差相对较小,能够更好地对加载系统实时控制跟踪㊂图13为正弦信号在加载力不同时加载过程中的摩擦力与摩擦系数曲线图㊂79第8期刘福才等:分数阶PID控制在电动变载荷加载系统中的应用图11㊀摩擦力与摩擦系数曲线图Fig.11㊀Friction and friction coefficientgraphs图12㊀正弦波加载实验曲线图Fig.12㊀Experimental graph of sine waveloading图13㊀摩擦力与摩擦系数曲线图Fig.13㊀Friction and friction coefficient graphs89电㊀机㊀与㊀控㊀制㊀学㊀报㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀第27卷㊀从图13可以看出,正弦波的摩擦力曲线和三角波形状类似,但摩擦系数在峰谷处变化较大,且加载力越小突变越剧烈,从侧面说明了加载力越大,曲线的误差越小,其跟踪效果越好㊂4㊀结㊀论针对电动加载系统中存在的强耦合㊁多余力干扰等问题,在传统PID控制的基础上提出了分数阶PID控制,对分数阶系统进行了稳定性分析和实现方案的设计,并利用改进惯性权重之后的粒子群优化算法对控制器的参数进行优化整定㊂对分数阶PID控制进行了模拟仿真,同时为了弥补现有文献只通过仿真验证分数阶PID的不足,将其应用于电动变载荷摩擦磨损试验机平台上,把仿真与实验结果和传统PID控制进行对比,可知分数阶PID控制响应更快,稳态精确度更高,更好地提高了电动变载荷系统的动态性能和鲁棒性㊂参考文献:[1]㊀庞佑霞,黄伟九,谭援强.工程摩擦学基础[M].北京:煤炭工业出版社,2004.[2]㊀王伟,孙见君,涂桥安,等.摩擦磨损试验机发展现状研究[J].机械设计与制造工程,2015,44(7):1.WANG Wei,SUN Jianjun,TU Qiaoan,et al.Research on the de-velopment status of friction and weartesting machine[J].Mechani-cal Design and Manufacturing Engineering,2015,44(7):1. [3]㊀李成功,靳红涛,焦宗夏.电动负载模拟器多余力矩产生机理及抑制[J].北京航空航天大学学报,2006(2):204.LI Chenggong,JIN Hongtao,JIAO Zongxia.Mechanism of excess torque generation and suppression in electric load simulators[J].Journal of Beijing University of Aeronautics and Astronautics,2006(2):204.[4]㊀CHEN J,HAN W,ZHAO P,et al.The study on path trackingcontrol method based on fuzzy-CMAC for autonomous vehicle in ru-ral environment[C]//2020IEEE International Conference on Sig-nal Processing,Communications and Computing(ICSPCC),Au-gust21-24,2020,Macau,China.2020:1-4.[5]㊀吕帅帅,林辉,樊明迪.电动加载系统多闭环复合控制[J].电机与控制学报,2015,19(9):16.LÜShuaishuai,LIN Hui,FAN Mingdi.Multi-closed-loop compos-ite control of electric loading system[J].Electric Machines and Control,2015,19(9):16.[6]㊀NAJM A A,IBRANHEEM I K.Altitude and attitude stabilizationof UAV quadrotor system using improved active disturbance rejec-tion control[J].Arabian Journal for Science and Engineering,2020,45(3):1985.[7]㊀薛定宇,赵春娜.分数阶系统的分数阶PID控制器设计[J].控制理论与应用,2007,24(5):771.XUE Dingyu,ZHAO Chunna.Fractional-order PID controller de-sign for fractional-order systems[J].Control Theory and Applica-tions,2007,24(5):771.[8]㊀邓立为,宋申民,庞慧.控制系统的分数阶建模及分数阶PIλDμ控制器设计[J].电机与控制学报,2014,18(3):85.DENG Liwei,SONG Shenmin,PANG Hui.Fractional-order mod-el of control system and design of fractional-order PIλDμcontroller [J].Electric Machines and Control,2014,18(3):85. [9]㊀刘福才,赵旭.电动变载荷加载系统的建模及线性自抗扰控制[J].高技术通讯,2020,30(7):716.LIU Fucai,ZHAO Xu.Modeling and linear self-anti-disturbance control of an electric variable load loading system[J].High Tech-nology Communications,2020,30(7):716.[10]㊀PODLUBNY I.Fractional-order systems and PI/sup/spl lamb-da//D/sup/spl mu//-controllers[J].IEEE Transactions on au-tomatic control,1999,44(1):208.[11]㊀CHOUDHARYS K.Stability and performance analysis of frac-tional order control systems[J].Wseas Transactions on Systemsand Control,2014,9(45):438.[12]㊀GUIJARRO N,DAUPHIN TANGUY G.Approximation methodsto embed the non-integer order models in bond graphs[J].SignalProcessing,2003,83(11):2335.[13]㊀齐乃明,宋志国,秦昌茂.基于最优Oustaloup的分数阶PID参数整定[J].控制工程,2012,19(2):283.QI Naiming,SONG Zhiguo,QIN Changmao.Fractional order PIDparameter tuning based on optimal Oustaloup[J].Control Engi-neering,2012,19(2):283.[14]㊀KENNEDY J,EBERHART R.Particle swarm optimization[C]//Proceedings of ICNN 95-International Conference on Neural Net-works,November27-December1,1995,Perth,WA,Austral-ia.1995:1942-1948.[15]㊀SHI Y,EBERHART R.A modified particle swarm optimizer[C]//1998IEEE International Conference on Evolutionary Com-putation Proceedings.IEEE World Congress on Computational In-telligence,May4-9,1998,Anchorage,AK,USA.1998:69-73.[16]㊀邵鹏,吴志健.一种带正弦函数因子的粒子群优化算法[J].小型微型计算机系统,2015,36(1):156.SHAO Peng,WU Zhijian.A particle swarm optimization algo-rithm with sine function factor[J].Small Microcomputer Sys-tems,2015,36(1):156.[17]㊀MAURYA A K,BONGULWAR M R,PATRE B M.Tuning offractional order PID controller for higher order process based onITAE minimization[C]//2015Annual IEEE India Conference,December17-20,2015,New Delhi,India.2015:1-5.(编辑:邱赫男)99第8期刘福才等:分数阶PID控制在电动变载荷加载系统中的应用。
多变量控制6.6 多变量解耦控制应用

6.6 多变量解耦控制应用
所谓解耦控制系统,就是采用某种结构,寻找合适 的控制规律来消除系统种各控制回路之间的相互耦合关 系型的解耦控制系统结构示 意图如下。 u 解耦控制器 待解耦系统 y
-
工程实例一:飞机
飞机在飞行中我们感兴趣的输出量是俯仰角、水平 位置和高度,控制输入变量是三个机翼的偏转。因为三 个输出量之间有耦合,如果要同时操纵三个输入量并成 功地控制飞机,要求驾驶员有相当高的技巧。如果系统 实现了解耦,就为驾驶员提供了三个独立的高稳定性的 子系统,从而可以独立地调整其俯仰角、水平位置和高 度。
解决思路
采用机理分析和实验数据分析相结合的方法,建 立了三输入、三输出变风量空调系统的数学模型。
并针对该系统采用对角矩阵法设计了变风量空调 系统的解耦器。 该解耦器可以使所研究的变风量空调控制系统的 开环传递函数矩阵和闭环传递函数矩阵都变换为对角 矩阵,从而解除各个控制回路之间的耦合,使变风量 空调系统实现解耦
工程实例二:造纸过程
加压网前箱横截面草图
加压网前箱的箱底总压和液位由气泵和浆泵的变化量决 定,是一个严重耦合的两输入两输出系统。
工程实例三
采用对角矩阵解耦法提高变风量空调的性能
解决变风量空调系统多个回路之间的耦合问题是暖 通空调领域的难点问题。 变风量空调(VAV)系统具有多变量、耦合强烈、非线 性等特点,且控制系统的设计具有较大难度。当所有回 路同时工作时,各个回路之间相互耦合、相互干扰,严 重影响变风量空调系统的性能,有时甚至会影响到整个 系统的稳定性。 解除多回路之间的耦合,提高VAV系统的性能是极 为关键和重要的, 本文采用对角矩阵法对变风量空调系统进行解耦 控制
多变量自校正控制器在空气调节系统中的应用解读
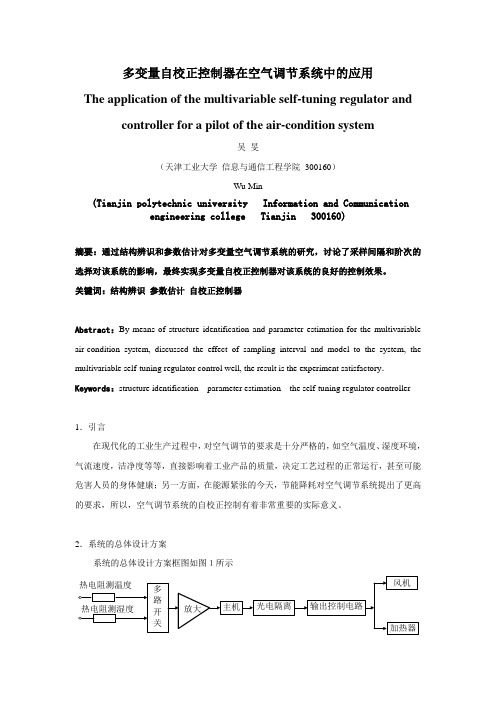
多变量自校正控制器在空气调节系统中的应用The application of the multivariable self-tuning regulator and controller for a pilot of the air-condition system吴旻(天津工业大学信息与通信工程学院300160)Wu Min(Tianjin polytechnic university Information and Communication engineering college Tianjin 300160)摘要:通过结构辨识和参数估计对多变量空气调节系统的研究,讨论了采样间隔和阶次的选择对该系统的影响,最终实现多变量自校正控制器对该系统的良好的控制效果。
关键词:结构辨识参数估计自校正控制器Abstract:By means of structure identification and parameter estimation for the multivariable air-condition system, discussed the effect of sampling interval and model to the system, the multivariable self-tuning regulator control well, the result is the experiment satisfactory.Keywords:structure identification parameter estimation the self-tuning regulator controller1.引言在现代化的工业生产过程中,对空气调节的要求是十分严格的,如空气温度、湿度环境,气流速度,洁净度等等,直接影响着工业产品的质量,决定工艺过程的正常运行,甚至可能危害人员的身体健康;另一方面,在能源紧张的今天,节能降耗对空气调节系统提出了更高的要求,所以,空气调节系统的自校正控制有着非常重要的实际意义。
火电厂热工自动控制技术及应用知识点总结

自动控制系统基础概论热工对象动态特性常规控制规律PID控制的特点比例控制(P控制)积分控制(I控制)微分控制(D控制)控制规律的选择:单回路控制概述被控对象特性对控制质量的影响:测量元件和变送器特性对控制质量的影响调节机构特性对控制质量的影响单回路系统参数整定串级控制串级控制系统的组成(要求会画控制结构图)串级控制系统的特点串级控制系统的应用范围串级控制系统的设计原则:前馈-反馈控制概述静态前馈,动态前馈前馈-反馈控制前馈-串级控制比值控制分程控制大迟延控制系统补偿纯迟延的常规控制预估补偿控制多变量控制系统耦合程度描述解耦控制系统设计火电厂热工控制系统汽包锅炉蒸汽温度控制系统过热蒸汽温度控制再热蒸汽温度一般控制方案汽包锅炉给水控制系统概述给水流量调节方式给水控制基本方案:给水全程控制:600MW机组给水全程控制实例锅炉燃烧过程控制系统概述被控对象动态特性燃烧过程控制基本方案燃烧控制中的几个问题单元机组协调控制系统概述负荷指令处理回路正常情况下负荷指令处理异常工况下的负荷指令处理负荷指令处理回路原则性方框图机炉主控制器机炉分别控制方式机炉协调控制方式直流锅炉控制系统直流锅炉特点直流锅炉动态特性直流锅炉基本控制方案直流锅炉给水控制系统直流锅炉过热汽温控制系统自动控制系统基础概论1. 控制系统的组成与分类1. 控制系统的组成及术语控制系统的四个组成部分: 被控对象,检测变送单元,控制单元,调节机构.2. 控制系统的分类:按结构分: 单变量控制系统, 多变量控制系统按工艺参数分: 过热汽温控制系统, 主蒸汽压力控制系统按任务分: 比值控制系统, 前馈控制系统按装置分: 常规过程控制系统, 计算机控制系统按闭环分: 开环控制系统, 闭环控制系统按定值的不同分: 定值控制系统, 随动控制系统, 程序控制系统3. 过渡过程: 从扰动发生,经过调节,直到系统重新建立平衡.即系统从一个平衡状态过渡到另一个平衡状态的过程,即为控制系统的过渡过程.2. 控制系统的性能指标1. 衰减比和衰减率: 衡量稳定性2. 最大偏差和超调量: 衡量准确性3. 调节时间: 衡量快速性4. 余差(静态偏差): 衡量静态特性热工对象动态特性1. 有自平衡能力对象1. 一阶惯性环节:2. 一阶惯性环节加纯迟延:3. 高阶惯性环节:4. 高阶惯性环节加纯迟延:2. 无自平衡能力对象1. 积分环节:2. 积分环节加纯迟延:3. 有积分的高阶惯性环节:4. 有纯迟延和积分的高阶惯性环节:常规控制规律PID控制的特点1. 原理简单,使用方便2. 适应性强3. 鲁棒性强比例控制(P控制)1. 控制规律: ; :比例增益:比例带,工程上用来描述控制作用的强弱.比例带越大,偏差越大.2. 控制特点:动作快有差控制积分控制(I控制)1. 控制规律:; :积分时间2. 控制特点:动作不及时无差控制3. PI控制: I控制响应慢,工程上很少有单独使用,一般都是PI控制控制规律:; P控制看作粗调,I控制看作细调.控制作用具有: 比例及时作用和积分作用消除偏差的优点.4. 积分饱和及其措施:积分饱和: 积分过量,在单方面偏差信号长时间作用下,其输出达到上下限时,其执行机构无法再增大.措施: 积分分离手段: 当偏差较大时,在控制过程的开始阶段,取消积分作用,控制器按比例动作,等到被调量快要接近给定值时,才能产生积分作用,依靠积分作用消除静态偏差.微分控制(D控制)1. 控制规律: ;2. 控制特点:超前控制3. 实际微分: 为什么采用实际微分控制:理想微分物理上不可能实现避免动作频繁,影响调节元件寿命4. PD控制: 控制规律: ;扰动进入系统的位置离输出(被调量)越远,对系统工作的影响就越小.控制通道的时间常数和迟延时间对控制质量的影响前馈-串级控制的应用场景:分程控制扩大调节阀的可调比大迟延控制系统补偿纯迟延的常规控制1. 微分先行控制方案2. 中间反馈控制方案前馈解耦导前温度: 刚通过减温器之后的蒸汽温度以导前蒸汽温度为副参数,过热蒸汽温度为主参数的串级控制系统3. 过热蒸汽温度分段控制系统:1. 过热蒸汽温度分段控制系统:缺点: 当机组负荷大范围变化时,由于过热器吸热方式不同.一级减温器出口蒸汽温度降低,为保持不变,必须减少一级减温器喷水量;二级减温器出口蒸汽温度升高,因此要增加二级减温器喷水量.造成负荷变化时两级减温器喷水量相差很大,使整个过热器喷水不均匀,恶化二级喷水减温调控能力,导致二级过热器出口温度超温.2. 按温差控制的分段控制系统:与第一种方案的差别在于: 这里以二级减温器前后的温差(-)作为第一段控制系统的被调量信号送入第一段串级的主调节器PI3.当负荷增大时,主调节器PI3的设定值随之减小,这样有(-)>T0,PI3入口偏差值增大,这意味着必须增大一级喷水量才能使下降,从而使温差(-)减小.这样平衡了负荷增加时一级喷水量和二级喷水量.该方案为串级+前馈控制策略. 后屏出口过热器出口蒸汽温度设定值由两部分组成,第一部分由蒸汽流量代表的锅炉负荷经函数发生器后给出基本设定值,第二部分是运行人员可根据机组的实际运行工况在上述基本设定值的基础上手动进行设置.虽然系统是控制后屏过热器出口温度蒸汽,用蒸汽温度信号经过比例器乘以常数K后代表后屏过热器出口蒸汽温度,其原因是蒸汽温度与蒸汽温度变化方向一致;且蒸汽温度信号比蒸汽温度信号动态响应快,能提前反映扰动对蒸汽温度的影响,有利于控制系统快速消除干扰.主调节器PID1的输出与总风量,燃烧器摆角前馈信号组合构成副调节器PID2的设定值,副调节器的测量值为一级减温器出口温度.PID2输出控制一级其控制原理如下:正常情况下即当再热蒸汽温度处于设定值附近变化时,由调节器PID1改变烟气挡板开度来消除再热蒸汽温度的偏差,蒸汽流量D作为负荷前馈信号通过函数模块去直接控制烟气挡板.当的参数整定合适时,能使负荷变化时的再热蒸汽温度保持基本不变或变化很小.反向器-K用以使过热挡板与再热挡板反向动作.喷水减温调节器PID2也是以再热蒸汽温度作为被调信号,但此信号通过比例偏置器±Δ被叠加了一个负偏置信号(它的大小相当于再热蒸汽温度允许的超温限值).这样,当再热蒸汽温度正常时,调节器PID2的入口端始终只有一个负偏差信号,它使喷水阀全关.只有当再热蒸汽温度超过规定的限值时,调节器的入口偏差才会变为正,从而发出喷水减温阀开的指令,这样可防止喷水门过分频繁的动作而降低机组热经济性.2. 采用烟气再循环调节手段的再热蒸汽温度控制系统其控制原理如下:再热蒸汽温度T 在比较器Δ内与设定值(由A 产生)比较,当蒸汽温度低时,偏差值为正信号,此信号进入调节器PID1,其输出经执行器去调节烟气挡板开度,增大烟气再循环量,以控制再热蒸汽温度.在加法器2中引入了送风量信号V 作为前馈控制信号和烟气热量(烟温×烟气流量)修正信号,送风量V 反映了锅炉负荷大小,同时能提前反映蒸汽温度的变化.当V 增加时,蒸汽温度升高,相应的烟气再循环量应减少,故V 按负向送入调节器.函数模块是用来修正风量和再循环烟气量的关系的.通过乘法器由烟温信号调整再循环烟气流量.当再热蒸汽超温时,比较器输出为负值,PID1输出负信号直至关闭烟气再循环挡板,烟气再循环失去调温作用.同时,比较器的输出通过反相器- K 1,比例偏置器±Δ去喷水调节器PID2,开动喷水调节阀去控制再热蒸汽温度,蒸汽温度负偏差信号经反相器-K2去偏差报警器,实现超温报警,同时继电器打开热风门,用热风将循环烟道堵住,防止因高温炉烟倒流入再循环烟道而烧坏设备.当再热蒸汽温度恢复到设定值时,比较器输出为零,PID2关闭喷水门,偏差报警信号通过继电器关闭热风门,烟气再循环系统重新投入工作.3. 采用摆动燃烧器调节手段的再热蒸汽温度控制系统燃烧器上倾可以提高炉膛出口烟气温度,燃烧器下倾可以降低炉膛出口烟气温度.燃烧器控制系统是一个加前馈的单回路控制系统,再热蒸汽温度设定值是主蒸汽流量经函数发生器,再加操作员可调整的偏置量A构成.PID1调节器根据再热器出口蒸汽温度T与再热蒸汽温度设定值偏差来调整燃烧器摆角.为了抑制负荷扰动引起的再热蒸汽温度变化,系统引入了送风量前馈信号,该信号能反映负荷和烟气侧的变化.送风量前馈信号和反馈控制信号经加法器4共同控制燃烧器摆角.A侧再热器出口蒸汽温度和B侧再热器出口蒸汽温度各有两个测量信号,正常情况下选择A,B两侧的平均值作为燃烧器摆角控制的被调量.燃烧器摆角控制为单回路的前馈-反馈控制系统,再热器出口蒸汽温度设定值由运行人员手动给出.再热器出口蒸汽温度设定值和实际值的偏差经PID调节器后加上前馈信号分别作为燃烧器摆角的控制指令.前馈信号由蒸汽流量经函数发生器后给出.当再热蒸汽温度偏低时,燃烧器摆角向上动作;当再热蒸汽温度偏高时,燃烧器摆角向下动作. 2. 再热蒸汽温度喷水减温控制系统汽包锅炉给水控制系统给水控制任务: 使锅炉的给水量适应锅炉的蒸发量,维持汽包水位在规定的范围内,同时保持稳定的给水流量.对象特性: 给水流量扰动的三个体现方面:4. 虚假水位现象: 当锅炉蒸发量突然增加时,汽包水下面的气泡容积也迅速增大,即锅炉的蒸发强度增强,从而使水位升高.给水控制基本方案:1. 单冲量给水控制系统: 汽包水位和水位给定值调节的反馈控制系统某600MW发电机组给水热力系统示意图,机组配三台给水泵,其中一台容量为额定容量30%的电动给水泵,两台容量各为额定容量50%的汽动给水泵.电动给水泵一般是作为启动泵和备用泵,正常运行时用两台汽动给水泵,两台汽动给水泵由小汽轮机驱动,其转速控制由独立的小汽轮机电液控制系统(micro-electro hydraulic control system,MEH)完成,MEH系统的转速给定值是由给水控制系统设置,MEH 系统只相当于给水控制系统的执行机构.在高压加热器与省煤器之间有主给水电动截止阀、给水旁路截止阀和约15%容量的给水旁路调节阀.2. 给水控制系统1. 水位控制系统汽包水位控制系统如图所示,它是单冲量和串级三冲量两套控制系统构成,汽包水位设定值由运行人员在操作台面上手动设定.当锅炉启动或负荷小于15%额定负荷阶段,控制系统是通过调节器PID1调节给水旁路的调节阀开度来控制给水量以维持汽包水位,而此时切换器T2接Y端,通过调节器PID5调节电动给水泵的转速来维持给水泵出口母管压力与汽包压力之差.当旁路调节阀开到80%时,由SCS (Sequence control system, 顺序控制系统)完成开主给水电动阀,关旁路截止阀.当负荷在15%额定负荷以上,但小于30%额定负荷时,切换器T1接Y端,切换器T2接N端,这时汽包水位设定值的偏差经调节器PID2,并经调节器PID6控制给水泵转速来调节给水流量达到维持汽包水位目的.同时当机组负荷升至20%额定负荷时,第一台给水泵开始冲转升速.当负荷大于30%额定负荷,切换器T1接N端,给水控制切换为三冲量给水控制.汽包水位控制指令由两个串级调节器PID3和PID4根据汽包水位偏差、主给水流量和主蒸汽流量三个信号形成.水位设定值与汽包水位偏差经调节器PID3 后,加主蒸汽流量信号作为副回路PID4的设定值,副回路副参数为主给水流量,经PID运算后作为给水泵控制的设定值.当负荷大于30%额定负荷时,第一台汽动给水泵并入给水系统.当负荷达40%额定负荷时,第二台汽动给水泵开始冲转升速.当负荷达60%额定负荷时,第二台汽动给水泵并入给水系统,撤出电动给水泵,将其投入热备用.机组正常时,是通过改变两台汽动给水泵的转速来调节给水量.由于给水泵的工作特性不完全相同,为稳定各台给水泵的并列运行特性,避免发生负荷不平衡现象,设计了各给水泵出口流量调节回路,将各给水泵的出口流量和转速指令的偏差送入各给水泵调节器(PID6、 PID7 和PID8)的入口,以实现多台给水泵的输出同步功能.GAIN CHANGER & BALANCER作用是根据给水泵投入自动的数量,调整控制信号的大小.拇入自动数目越大,控制信号越小.2. 给水泵最小流量控制汽机跟随控制方式:控制特点: 锅炉侧调负荷,汽机侧调汽压. 在保证主蒸汽压力稳定的情况下,汽轮机跟随锅炉而动作.优点: 在运行中主蒸汽压力相对稳定,有利于发电机组的安全经济运行.机炉协调控制方式控制特点: 在负荷调节动态过程中,机炉协调控制可以使汽压在允许的范围内波动,这样可以充分利用锅炉蓄热,使单元机组较快适应负荷变化,同时主蒸汽压力p T的变动范围也不大,因而机组的运行工况比较稳定.调节燃料量M控制主蒸汽压力p T(或机组负荷) 调节送风量V控制过剩空气系数(烟气含氧量) 调节引风量V控制炉膛压力p汽轮机控制系统为工频电液控制系统时:另一种送风控制系统方案. 锅炉指令BD经过函数发生器f2(x)后形成一个风量指令,氧量调节器输出σ对锅炉指令BD进行修正.3. 引风控制系统: 引风控制系统的任务是保证一定的炉膛压力. 由引风量改变到炉膛压力变化其动态响应快,测量也容易,因此一般采用单回路即可.3. 燃烧控制系统基本方案锅炉指令BD作为给定值送到燃料控制系统和送风控制系统,使燃料量和送风量同时改变,使燃烧率与机组要求的燃烧率相适应,保证风量与燃料量比例变化; 同时送风量作为前馈信号通过引到引风调节器PI4,改变引风量以平衡送风量的变化,使炉膛压力p s不变或变化很小.由于所有调节器都采用PI控制规律,因此,调节过程结束时,主蒸汽压力P T,燃烧经济性指标O2和炉膛压力p s,都稳定在给定值上;而锅炉的燃料量M,送风量V和引风量V都改变到与要求的燃烧率相适应的新数值上.总燃料量(总发热量)的构成形式为其中: O为燃油量,k o为燃油发热系数,M c为总煤量,k MQ为煤发热系数.当M c不变,而煤种变化造成发热量增加时,刚开始M也不变,但随着炉膛发热量的增加,D Q增大,D Q>M,由积分器正向积分增大k MQ,使M增大,直至M=D Q3. 增益自动调整乘法器为燃料调节对象的一部分,选择合适的函数,则可以做到不管给煤机投入的台数如何,都可以保持燃料调节对象增益不变,这样就不必调整燃料调节器的控制参数了.增益调整与平衡器,就是完成该功能.4. 风煤交叉限制在机组增减负荷动态过程中,为了使燃料得到充分燃烧,需要保持一定的过量空气系数. 因此,在机组增负荷时,就要求先加风后加煤;在机组减负荷时,就要求先减煤后减风.这样就存在一个风煤交叉限制.锅炉指令BD经函数器f1(x)后转换为所需的风量,风量经函数器f2(x)转换为相应风量下的最大燃料量,燃料量经函数器后转换为该燃料量下的最小风量.当增加负荷时,锅炉指令BD增大,在原风量未变化前,低值选择器输出为原风量下的最大燃料量指令,即仍为原来锅炉指令BD.在风量侧,锅炉指令BD增大,则其对应的风量指令增大,大于原燃料量所需最小风量,经高值选择后作为给定值送至送风控制系统以增大风量.只有待风量增加后,锅炉燃料的给定值才随之增加,直到与锅炉指令BD一致.由此可见,由于高值选择器的作用,风量控制系统先于燃料控制系统动作.由于低值选择器的作用,使燃料给定值受到风量的限制,燃料控制系统要等风量增加后再增加燃料量.同理,减负荷时,由于低值选择器的作用,燃料给定值先减少.由于高值选择器的作用,使风量给定值受到燃料量限制,风量控制系统要等待燃料量降低后再减少风量.上图为煤粉锅炉燃料系统的一般控制方案.其中虚框1的功能是完成总燃料量(发热量)的测量与修正.虚框2的功能是燃料侧的风煤交叉限制.5. 风机调节本节下略单元机组协调控制系统概述1. 单元机组协调控制系统的基本组成2. 机组负荷控制系统被控对象动态特性3. 机组负荷控制系统被控对象动态特性1. 单元机组动态特性:当汽轮机调门开度动作时,被调量p E和p T的响应都很快,即热惯性小.当锅炉燃烧率改变时,被调量p E和p T的响应都很快,即热惯性小.2. 负荷控制系统被控对象动态特性1. 机组主机,主要辅机或设备的故障原因有两类跳闸或切除,这类故障的来源是明确的,可根据切投状况加以确定工作异常,其故障来源是不明确的,无法直接确定,只能通过测量有关运行参数的偏差间接确定.2. 对机组实际负荷指令的处理方法有四种: 负荷返回RB, 快速负荷切断FCB, 负荷闭锁增/减BI/BD, 负荷迫升/迫降RU/RD. 其中,负荷返回RB和快速负荷切断FCB是处理第一类故障的;负荷闭锁增/减BI/BD 和负荷迫升/迫降RU/RD是处理第二类故障的.1. 负荷返回RB负荷返回回路具有两个主要功能: 计算机组的最大可能出力值;规定机组的负荷返回速率.发电机组负荷返回回路的设计方案: 该机组主要选择送风机,引风机,一次风机,汽动给水泵,电动给水泵及空气预热器为负荷返回监测设备.当其中设备因故跳闸,则发出负荷返回请求,同时计算出负荷返回速率.RB目标值和RB返回速率送到如图13-9所示的负荷指令处理回路中去.2. 负荷快速切断FCB当机组突然与电网解列,或发电机,汽轮机跳闸时,快速切断负荷指令,实现机组快速甩负荷.主机跳闸的负荷快速切断通常考虑两种情况: 一种是送电负荷跳闸,机组仍维持厂用电运行,即不停机不停炉; 另一种是发电机跳闸,汽轮机跳闸,由旁路系统维持锅炉继续运行,即停机不停炉.负荷指令应快速切到0(锅炉仍维持最小负荷运行).负荷快速切断回路的功能与实现和负荷返回回路相似.只不过减负荷的速率要大得多.3. 负荷闭锁增/减BI/BD当机组在运行过程中,如果出现下述任一种情况:任一主要辅机已工作在极限状态,比如给风机等工作在最大极限状态燃料量,空气量,给水流量等任一运行参数与其给定值的偏差已超出规定限值.认为设备工作异常,出现故障.该回路就对实际负荷指令加以限制,即不让机组实际负荷指令朝着超越工作极限或扩大偏差的方向进一步变化,直至偏差回到规定限值内才解除闭锁.4. 负荷迫升/迫降RU/RD对于第二类故障,采取负荷闭锁增/减BI/BD措施是机组安全运行的第一道防线.当采用BI/BD措施后,监测的燃料量,空气量,给水流量等运行参数中的任一参数依然偏差增大,这样需采取进一步措施,使负荷实际负荷指令减小/增大,直到偏差回到允许范围内.从而达到缩小故障危害的目的.这就是实际负荷指令的迫升/迫降RU/RD,负荷迫升/迫降是机组安全运行的第二道防线.负荷指令处理回路原则性方框图该负荷指令处理回路功能的1原则性框图,是在正常工况下符合指令处理原则性方案上,添加了异常工况下相应负荷指令处理功能.锅炉跟随方式在大型单元机组负荷控制中只是作为一种辅助运行方式.一般当锅炉侧正常,机组输出电功率因汽轮机侧的原因而受到限制时,如汽轮机侧的主、辅机或控制系统故障,汽轮机控制系统处2. 汽轮机跟随方式机组负荷响应速度慢,不利于带变动负荷和参加电网调频.这种负荷控制方式适用于带基本负荷的单为了克服正反馈,应以汽轮机的能量需求信号而不是实际的消耗能量信号作为对锅炉的能量要求信号,即应以蒸汽流量的需求(称为目标蒸汽流量)而不是实际蒸汽流量作为锅炉的前馈控制信号.为此必须对p1进行修正,以形成目标蒸汽流量信号.直流锅炉控制系统上面两种控制方案均没有考虑过热汽温对燃料量和给水流量的动态响应时间差异,,会造成燃水比的动态不匹配,使得过热汽温波动大.为此提出一种燃料-给水控制原则性方案:可以选择锅炉受热面中间位置某点蒸汽温度(又称为中间点温度或微过热温度)作为燃水比是否适当的信号.这是一个前馈-串级调节系统,副调节器PID2输出为给水流量控制指令,通过控制给水泵的转速使得锅炉总给水流量等于给水给定值,以保持合适的燃水比.主调节器PID1以中间点温度为被调量,其输出按锅炉指令BD形成的给水流量基本指令进行校正,以控制锅炉中间点汽温在适当范围内.控制系统可分同负荷下的分离器出口焓值给定值.焓值给定值加上PID1输出的校正信号构成给定值SP2,由分离器出口压力和温度经焓值计算模块算出分离器出口焓值,该出口焓值与给定值SP2的偏差经调节器PID2 进行PID运算后,作为校正信号,对给水基本指令进行燃水比校正. 调节器PID3的给定值SP3是由,锅炉指令BD指令给出的给水流量基本指令加上调节器PID2输出的校正信号构成.调节器PID3根据锅炉总给水流最与流量给定值SP3的偏差进行PID运算,输出作为给水流量控制指令调节给水泵转速来满足机组负荷变化对锅炉总给水流量的需求.3. 采用焓增信号的给水控制方案在上图所示的给水控制系统中,由调节器PID3根据给定值SP3与省煤器入口给水流量(锅炉给水流量)的偏差向给水泵控制回路发出给水流量控制指令,在给水泵控制回路中,通过调节给水泵转速来实现调节给水流量的要求.在此重点分析给水流量给定值SP3的形成.当锅炉负荷在35%~ 100%MCR范围内,没有循环水流量和省煤器入口最小流量限制时,省煤器入口给水流量(锅炉给水流量)给定值SP3为水吸收的热量焓增焓增修正其中的水吸收的热量和焓增如图所示给出.。
多变量控制图的理论分析与实际应用的开题报告

多变量控制图的理论分析与实际应用的开题报告
一、研究背景
控制图在过去的质量管理中扮演着重要角色,其能够通过不断监测生产过程来确保产品质量的稳定性。
然而,对于多维度的数据进行监测,单一的控制图就已经不再足够。
因此,多变量控制图应运而生,被广泛应用于各个领域,如制造业、石油化工等等。
但是多变量控制图的理论分析与实际应用仍有一定的挑战,因此深入研究其理论基础和实践应用非常必要。
二、研究目的
本研究旨在深入研究多变量控制图的理论基础和实际应用,探究其在工业生产中的作用和意义。
具体研究目标如下:
1. 分析多变量控制图的概念、类型和优缺点;
2. 探究多变量控制图的建立方法,理论基础和统计性质;
3. 研究多变量控制图在实际生产中的应用与案例分析;
4. 总结多变量控制图的优缺点,指出其未来发展方向和研究方向。
三、研究方法
本研究将采用文献综述法和案例分析法。
对多变量控制图相关领域的经典著作和期刊论文进行综述和分析,同时结合实际应用案例进行深度分析和讨论。
四、预期结果
未来研究成果将主要包括多变量控制图的理论分析和实际应用两部分。
理论分析部分主要是针对多变量控制图的统计分布、理论基础、控制限的确定方法等方面进行分析,能够进一步探究控制图的稳健性和特点。
实际应用部分则主要是通过以实例为基础的案例分析,探究控制图在实际生产中的应用效果和优缺点。
五、研究意义
本研究对制造业、石油化工等领域的质量控制和生产管理以及数据分析等方面都有着重要的参考价值。
同时为多变量控制图的发展和完善提供了基础研究支持。
ALSTOM气化炉的分散PID控制
第38卷第4期2008年7月 东南大学学报(自然科学版)JOURNAL O F SOU THEAST UN I V ERS ITY (N atural Science Edition )V ol 138N o 14July 2008ALSTOM 气化炉的分散PID 控制吴 科 吕剑虹 向文国 丁维明(东南大学能源与环境学院,南京210096)摘要:针对AL STOM 气化炉的非线性、多变量动态特性,提出了2种基于常规PI D 控制器的气化炉多变量控制方案.方案1首先通过相对增益矩阵分析法确定气化炉输入变量与输出变量之间的关联程度,然后确定多变量控制方案;而方案2是对国外学者提出的一种不能满足全部测试要求的方案的改进.对2种控制方案进行了详细的多工况仿真测试,测试结果表明:方案1只要在适当放宽煤量改变速率限制的情况下,不仅可以满足AL STOM 气化炉的基准测试要求,而且各项控制指标均优于方案2;方案2能严格满足各项基准测试要求,但系统总的动态控制品质逊于方案1.与许多复杂控制算法如模型预测控制不同,控制方案基于常规PI D 控制,便于工程实现,对工业应用具有更好的指导意义.关键词:自动控制技术;AL STOM 气化炉;非线性;多变量;PI D 控制器;分散控制中图分类号:TP 273 文献标识码:A 文章编号:1001-0505(2008)0420662206Decentrali zed PI D control for ALST OM gasi fi erW u Ke L üJ ianhong X iang W enguo D ing W ei m ing(School of Energy and Environm ent,Southeast U niversity,N anjing 210096,C hina )Abstract:A ccording to the strong nonlinearity and m ultivariable characteristics of the AL STOM gas 2ifier,t w o m u ltivariable conven tional p roportional 2integral 2derivative (P I D )controller 2based con trol schem es are p roposed .Schem e 1is derived after the cross coup ling is deter m ined using relative gain array analysis .Schem e 2is an i m p rovem ent upon the p redecesso r πs w ork w h ich could not m eet all the specifications .The extensive si m ulations on differen t operating poin ts show that w ith the coal feed constrain t relaxed to som e extent,schem e 1can m eet all the sp ecifications of the benchm ark p roblem ,its control perfo r m ance is better than that of schem e 2.A nd schem e 2can strictly m eet all the specifications of the benchm ark test but the p erfor m ance is not as good as that of schem e 1.U n 2like the p reviously p roposed com p lex control algorithm s (such as m odel p redictive contro l ),these t w o schem es adop t the trad itional PI D contro l algorithm w hich can be easily i m p lem ented in p ractice,thus,p roviding better guidelines to the industrial app lications .Key words:autom atic con trol technique;AL STOM gasifier ;nonlinear ;m ultivariable;p ropo rtional 2integral 2derivative (PI D )con troller ;decentralized control收稿日期:2008202226. 作者简介:吴科(1981—),男,博士生;吕剑虹(联系人),男,博士,教授,博士生导师,jhlu -seu @yahoo .基金项目:国家高技术研究发展计划(863计划)资助项目(2006AA 05A 107)、江苏省科技成果转化专项资金资助项目(BA 2007008).引文格式:吴科,吕剑虹,向文国,等.ALSTOM 气化炉的分散PI D 控制[J ].东南大学学报:自然科学版,2008,38(4):6622667. 整体煤气化联合循环(IGCC )作为一种高效的清洁燃煤发电技术正日益受到重视,已成为国内外的一个研究热点.国际上的一些著名公司,如英国B P 公司、美国TEXA CO 公司、G E 公司等都在进行煤炭联产集成系统的优化发展和适宜联产系统的关键技术研究.我国也已经将I GCC 技术的研究列入国家高技术研究发展计划(863计划),在“十一五”期间将完成多个示范工程.I GCC 主要工艺过程是:在气化炉中煤(或其他含碳能源)、水蒸汽和空气(或来自空气分离装置的氧气)在一定的温度和压力条件下经一系列复杂的化学反应过程,转换为中低热值的煤气,煤气经过净化后,送入燃气轮机燃烧做功,燃气轮机排出尾气进入余热锅炉产生蒸汽,蒸汽推动蒸汽轮机再带动发电机发电,从而实现高效的整体联合循环[1].由于实现了能量的梯级利用,因此整个发电系统具有较高的效率,且较好地解决了常规燃煤电站的环境污染问题.在整个系统中,燃气轮机及蒸汽动力系统都已经在传统电站中得到广泛应用,其控制系统已比较完善;而气化炉部分是一个复杂的大滞后非线性高耦合系统,且对各种扰动的影响都很敏感,其相关的控制理论和应用都不成熟.AL STOM公司针对一个小规模IGCC示范电厂建立了气化炉模型,该模型经过与现场的实测数据校验,具有较高的准确度[2].由于气化炉是一个多变量、高耦合、强非线性及对外界扰动十分敏感的系统,研究相关的控制策略已成为一个热点问题.为了设计出有效的气化炉控制系统,AL STOM 公司针对此气化炉模型提出了基准测试问题,列出了一系列基准测试项目和对应的系统约束条件,并且认为只有满足各项基准测试要求的控制系统才是有效的[3].针对此问题,文献[4]应用工程化的方法,提出了多种输入、输出之间的匹配关系,采用PI D调节器进行控制,但仿真表明所提出的4种多变量PI D控制系统均无法满足全部的基准测试要求.文献[527]分别采用预测控制、状态预测以及自适应微分演化算法等高级控制策略对气化炉进行控制,满足了基准测试要求,但由于控制算法十分复杂,往往难以在分散控制系统D CS中实现.在实际的工业控制工程中,传统的PI D控制由于其设计思路简单直观且具有较好的鲁棒性而被广泛应用,如果能提出基于常规PI D控制的气化炉控制方案且能满足AL STOM的基准测试要求,则对工程应用更具价值.尽管文献[4]所提出的4种PI D控制方案都没有达到AL STOM的基准测试要求,但这并不表示基于常规PI D的控制方案就无法对气化炉进行有效控制.本文针对AL S2 TOM气化炉的非线性、多变量动态特性,提出了2种基于常规PI D控制器的多变量气化炉控制方案.方案1首先通过相对增益矩阵分析法确定气化炉输入变量与输出变量之间的关联程度,然后确定多变量控制方案;而方案2是在前人控制方案的基础上改进获得.对这2种方案的基准测试结果表明:第1种分散PI D控制方案可以在放松给煤量约束条件的前提下,满足基准测试要求,且具有很好的控制品质;而第2种分散PI D方案可以在满足全部操纵变量限制条件的情况下满足基准测试所提出的各项要求.在工程上,进入气化炉的煤粉量一般是通过调节螺旋给料机的转速(变频调速)来实现的,放宽给煤量的速率限制条件意味着提高变频调速的响应速度,这在工程上是便于实现的,因此,方案1在工程上也是有效的控制方案.1 ALSTOM气化炉被控过程及控制要求 煤气化是I GCC最重要的核心技术之一,已投入运行的I GCC装置大多采用了固定床、流化床、水煤浆或干煤粉气流床等先进的煤气化工艺[8],采用不同的煤气化工艺,气化炉的结构和运行方式等均有很大的不同.AL STOM气化炉模型是根据一台87MW空气气化流化床气化炉建立的.在该气化炉中,经过处理的煤与一定比例的石灰石混合,与空气和水蒸汽进入气化炉,在一定的温度和压力下进行复杂的化学反应,产生低热值的煤气,煤灰、C aS以及未反应的碳作为灰渣排出.煤气化过程是一个复杂的热化学反应,可以分为高温热解过程、煤焦的氧化反应和部分氧化反应和脱硫反应等部分.各种反应程度和速率受到煤种、温度、压力以及物料在炉内停留时间、传热条件和温度历程等因素的影响.显然,煤气化被控过程是一个典型的多变量、大滞后、强非线性及高灵敏的过程,在系统受到扰动或者工况变化时,系统动态特性会发生很大的变化,使得控制系统难以获得良好的控制品质.AL STOM公司提出的气化炉模型被控过程有5个输入变量(操纵变量),分别为:排渣量(W CHR,Ch)、空气流量(W A I R,A)、给煤流量(W COL,C)、水蒸汽流量(W ST M,S)及石灰石流量(W L S,Ls);4个输出变量(被控变量)分别为:煤气热值(CV GA S,Cv)、床料质量(M A SS,m)、气化炉压力(PGA S,P)及温度(TGA S,T).由于入炉的石灰石质量和煤粉质量是成比例的(1∶10),整个气化炉被控过程实质上是一个4×4的多变量对象.对于气化炉系统,主要的外界扰动来自于燃气轮机工况的变化,因此,将燃气轮机的入口压力(PS I N K)作为一个主要的外界扰动量.AL STOM公司建立了示范I GCC电厂气化炉的动态机理模型,为获得针对这一模型的有效控制策略,AL STOM公司提出了各种基准测试、输入约束及控制目标等,作为检验所设计控制系统有效性的方法[9].2 气化炉的分散PI D控制通过对AL STOM气化炉模型在各个稳定工况366第4期吴科,等:ALST OM气化炉的分散P I D控制点上的开环阶跃响应试验可以看出,作为一个化学反应过程,该过程是一个非线性、大惯性且高耦合的多变量系统,燃气轮机吸入口扰动对系统影响较大.目前提出的各种高级控制策略虽然可以满足测试要求,但在工程上实现比较困难,本文遵循实际控制系统设计的一般方法,参考被控系统的阶跃响应试验结果,采用工程化方法,提出2种传统的分散PI D控制方案对气化炉进行控制.211 方案1在工程上,需要对多变量系统的控制回路进行相互关联分析,以确定多变量控制系统中各变量之间的关联程度,从而确定最佳的操纵变量2被控变量搭配.相对增益矩阵(RGA)是其中最常用的分析方法,通过该方法可以得到本文的控制方案1.相对增益矩阵分析方法的基本原理是:对于一个具有N个被控变量和N个操纵变量的多变量控制系统,输入uj 对输出yi的相对增益可定义为λij =5y i5u j u5y i5u j y(1)式中,(5yi/5u j)u表示除u j以外其他回路都开环时u j对y i的增益;(5y i/5u j)y表示除u j以外其他回路都闭环时uj 对yi的增益;相对增益λij描述了当其他控制回路加入时对yi2u j控制回路的影响程度,λij越接近1,则表明该控制回路受到其他回路的影响越小,反之则表明该回路受到其他回路的影响越大.在相对增益矩阵的每一行(或者列)中分别选取数值最大的元素,相应的输入输出配对关系即为最佳操纵变量2被控变量搭配.同时,由于相对增益是不同条件下2个增益的比值,因此是无量纲的,故不受单位和量纲的影响,对非线性也不敏感[10].相对增益矩阵的计算可以按照如下的简便方法进行:Λ=K・(K-1)T(2)式中,K表示系统开环增益矩阵;“・”表示矩阵对应元素的相乘,即矩阵的Hadam ard乘积.在100%工况下,对系统4个输入分别做10%指令阶跃增实验,通过系统响应曲线分析,可以得到系统开环增益矩阵K,即K=14328-4623822239-54097 -574319-1388144692-692155 -6711813664140613756219 -21283201695-181503-441876(3)利用式(2),可以计算在100%工况下系统的RG A,如表1所示.表1 100%工况下相对增益矩阵分析RGA W CHR W A I R W COL W ST MCVGAS012471-011454014639014343 M ASS017716010052012137010095PGAS-010391019670011281-010590TGAS010203011703011942016152 根据相对增益矩阵分析的结果,可以得到方案1中操纵变量和被控变量之间的搭配关系:1)煤气焓值由给煤量调节,煤量的改变影响产物可燃物质的成分,从而影响煤气的焓值;2)床料由排渣量来调节,排渣量的变化影响到总的物料平衡;3)煤气压力由空气量调节,空气量的变化可以快速改变煤气压力;4)煤气温度由蒸汽量调节,蒸汽量的变化可以快速改变气化炉系统的温度.通过在其他工况点上的相关性分析,同样可以获得相同的输入2输出搭配关系.在方案1中还加入了以下2个前馈作用:1)空气量对给煤量的前馈作用,实际过程中要求空气量与给煤量保持一定比例;2)排渣量对给煤量的前馈,给煤量与排渣量保持一定比例关系可以起到床料质量的粗调作用.第1种分散PI D控制方案原理图如图1所示.图1 第1种气化炉分散PI D控制方案212 方案2文献[4]中应用工程化的方法提出了多种传统的PI D控制方案,但是所提出的方案均无法完全满足基准测试的要求,其中的方案4虽然不能完全满足基准测试要求,但相对而言,该控制方案的抗干扰能力最强.本文在文献[4]中方案4的基础上进行改进,466东南大学学报(自然科学版) 第38卷通过结构优化和参数调整,形成了本文的第2种分散PI D 控制方案.在该方案中,CV GA S 由W A IR 控制,M A SS 由W COL 控制,PGA S 由W ST M 控制,TGA S 由W CHR 控制.在文献[4]基础上,本文新增了排渣量对给煤量以及给煤量对空气量的前馈作用,调节器的参数也做了适当的调整,所提出的方案2如图2所示.图2 第2种气化炉分散PI D 控制方案2.3 PI D 算法的实现在以上的2种控制方案中,所采用的PI D 控制算法如图3所示.图3 PI D 控制器原理图该PI D 控制器采用增量式PI D 算法,基本的算法为u (k )=u (k -1)+K p 1+T d T s +T s T ie (k )- K p (1+2T dT s)e (k -1)+K p T dT se (k -2)(4)式中,u (k ),u (k -1)为当前和上一时刻的P I D 输出;K p ,T i ,T d 分别为比例增益、积分时间和微分时间;e (k ),e (k -1),e (k -2)分别为当前时刻、上一时刻以及前2个时刻的P I D 入口偏差.该P I D 还具有输入死区、前馈、手自动切换、跟踪、幅值限制、速率限制以及抗积分饱和等功能,与实际应用中所采用的P I D 完全一致.3 测试结果将以上2种分散PI D 控制方案应用于AL S 2TOM 气化炉控制.应用工程整定方法对各回路PI D 进行初步整定,再通过在线调试,得到表2所示的调节器参数.仿真系统所采用的采样时间取为0105s .表2 2种方案的调节器参数通道K pT iT d方案1焓值控制器CVC 010004201120100床料控制器M C -010291-41960100压力控制器PC 010006371720100温度控制器TC -2142-246130100前馈控制器K 101495前馈控制器K 21133方案2焓值控制器CVC -0100013-112520100床料控制器M C 0107511875100100压力控制器PC 010016318460100温度控制器TC 511256130100前馈控制器K 12110前馈控制器K 21133 按照AL STOM 公司基准测试要求,对所设计的控制系统需进行基准测试:①在稳定工况下,进行燃机吸入口压力阶跃变化的扰动试验(规定变化幅度-20kPa );②稳定工况下,进行幅值为20kPa 、频率为0104H z 的吸入口压力正弦波扰动试验;③以不超过5%/m in 变化率进行从50%工况升至100%工况的变负荷试验.由于0%工况下被公认为是最难以控制的工况,故吸入口的压力阶跃扰动和正弦波扰动试验以在0%工况下试验结果为例.3.1 0%工况下吸入口压力阶跃扰动试验根据基准测试要求,保持系统在0%工况点稳定运行30s,然后开始做吸入口压力为-20kPa 的阶跃扰动试验,试验持续时间为300s .2种方案的系统响应和控制作用的变化如图4所示.图4(a )中上下2条虚线表示允许的动态偏差范围,只要被控变量落在这2条虚线之间则满足测试要求;图4(b )中的2条虚线代表控制作用的幅值限制,控制作用不能超出该限制.需要指出的是,图4中方案1的结果是在放宽给煤量变化率限制条件(放宽到118kg /s 2,因考虑到在实际系统中比较容易增加给煤量的变化率)下得到的,该限制条件可以方便地在实际应用中得到满足.从图4可以看出,在0%工况下进行的吸入口压力阶跃扰动试566第4期吴科,等:ALST OM 气化炉的分散P I D 控制图4 0%工况下吸入口压力阶跃扰动时系统响应曲线验中:1)方案1可以在适当放宽给煤量限制条件的情况下满足基准测试要求,且各被控变量动态偏差小,系统可以快速消除扰动,控制品质较好.2)方案2可以在满足全部输入限制条件的情况下满足基准测试要求.通过比较可以看到,放宽给煤量限制条件后的方案1较方案2具有更好的控制品质.312 0%工况点上吸入口压力正弦波扰动试验该试验严格按照AL STOM基准测试要求,首先保持系统在0%工况点稳定运行30s,然后开始做吸入口压力幅值为20kPa、频率为0104H z的正弦波扰动试验,试验持续时间为300s,2种方案下系统响应和控制作用变化如图5所示.从图5可以看出,在0%工况下进行的压力正弦波扰动试验中,方案1可以在适当放宽给煤量速率限制的情况下满足基准测试要求,且各被控变量动态偏差很小,控制品质较好;而方案2可以在满足全部输入限制条件的情况下满足基准测试要求.通过比较可以看出,在该试验中,放宽给煤量限制条件后的方案1较方案2具有更好的控制品质,快速的给煤量响应可以有效提高控制品质,此结论对气化炉给料系统的设计有指导意义.根据基准测试的要求,需要在0%,50%,图5 0%工况下压力正弦波扰动试验响应曲线100%工况下重复上述扰动试验,限于篇幅,本文未给出系统响应曲线,3种不同工况下的试验数据如表3所示.其中方案1的数据是在放宽给煤量限制的条件下得到的.从表3可以看出,3种工况点上,当吸入口压力波动时2种方案均能满足要求.表3 3种不同工况下吸入口压力扰动试验结果输出阶跃扰动试验(方案1/方案2)正弦波扰动试验(方案1/方案2)最大绝对误差I A E最大绝对误差I A E100%负荷CVGAS2136/61552615/73162115/4192395/836M ASS1192/3714116/10102PGAS0103/01040129/012401016/01064019/1108TGAS0107/01300106/013650%负荷CVGAS2199/716525167/88172179/5184460/941M ASS1185/44132119/9106PGAS01041/01050132/012901018/010193105/3123TGAS0108/013201065/01680%负荷CVGAS5138/81854516/100124160/8155828/1159M ASS1152/33176175/2019PGAS0105/01070144/014701024/010874140/713TGAS0111/014301084/0186313 50%~100%工况变负荷试验本试验中,根据基准测试要求,需进行负荷(L)变动试验,首先保持系统在50%工况点稳定运行100s,然后开始做从50%工况至100%工况变负荷试验,负荷设定值变化率取为5%/m in,试验持续时间为5000s.两种控制方案下系统响应和控666东南大学学报(自然科学版) 第38卷制作用变化如图6所示.图6 气化炉50%~100%工况变负荷试验响应曲线从图6可以看出,当负荷设定值以5%/m in 的变化率从50%升至100%时:1)控制方案2使气化炉的负荷、煤气热值、煤气压力及煤气温度很好地跟踪期望值的变化,但床料质量动态偏差较大,且需要经过较长一段时间才能回复到原来值,但最大动态偏差仍在可接受的范围内,这种现象在其他学者提出的方案中也存在.2)控制方案1可以使负荷、床料质量、煤气压力及煤气温度很好地跟踪期望值的变化,而煤气焓值在变负荷过程中则与期望值产生了一定的偏差,但是这种偏差可以在变负荷过程结束后被迅速地消除,总体的控制品质较好.4 结论1)方案1最直观,容易被人接受,在放松给煤量限制条件的情况下可以满足测试要求且具有更好的控制品质.2)方案2可以在满足全部操纵变量限制的条件下,满足基准测试的全部要求.3)2种传统方案均采用了与工程应用中完全一致的分散PI D 控制算法,证明传统方案也可以应用于气化炉的控制,从而为气化炉的现场控制提供了指导.4)提高给煤量的响应速度,是取得较高控制品质的关键,因此在气化炉给料系统设备选型中,应选用调节范围大且响应快的煤量调节方式.参考文献(References)[1]Ye Zhengm ao,M oham adian H P,Ye Yongm ao .Inte 2gration of I GCC p lants and reachable m ulti 2objective ther m oeconom ic op ti m ization [C ]//IEEE Interna tiona l C onference on C omputa tiona l C ybernetic .Tallinn,Es 2tonia,2006:123.[2]D ixon R,P ike A ,D onne M.The AL STOM benchm arkchallenge on gasifier control[J ].P roceedings of the In 2stitution of M echanica l Engineers,Pa rt Ⅰ:J ourna l of System s and C ontrol Engineering,2000,214(6):3892394.[3]D ixon R,P ike A W.Introduction to the 2nd ALSTOMbenchm ark challenge on gasifier control[C ]//P roceed 2ings of C ontrol .B ath,U K,2004:5852601.[4]A sm ar B N ,Jones W E,W ilson J A.A p rocess engi 2neering app roach to the A lstom gasifier p roblem [J ].P roceedings of the Institution of M echanica l Engineers,Pa rt Ⅰ:J ourna l of System s and C ontrol Engineering,2000,214(6):4412452.[5]S eyab R K A l,C ao Y,Yang S H.Predictive controlfor the ALS TOM gasifier p roblem [J ].IEE P roc C on 2trol Theory App l,2006,153(3):2932301.[6]W ilson J A ,C hew M ,Jones W E,et al .S tate esti m a 2tion based control of a gasifier [J ].IEE P roc C ontrol Theory App l,2006,153(3):2682276.[7]N obakhti A ,W ang H.A si m p le self 2adap tive differenti 2al evolution algorithm w ith app lication on the ALSTOM gasifier [J ].App lied Soft C omputing,2008,8(1):3502370.[8]史本天,郭新生,刘英萍,等.I GCC 发电系统中煤气化工艺的选择[J ].燃气轮机技术,2006,19(1):21225.Shi B entian,G uo X insheng,L iu Y ingp ing,et al .S elec 2tion of coal gasifier technology for IGCC pow er genera 2tion system [J ].G as Turbine Technology,2006,19(1):21225.(in C hinese )[9]D ixon R.A lstom benchm ark challenge Ⅱon gasifier control[J ].IEE P roc C ontrol Theory App l,2006,153(3):2542261.[10]邵惠鹤.工业过程高级控制[M ].2版.上海:上海交通大学出版社,2003:1462158.766第4期吴科,等:ALST OM 气化炉的分散P I D 控制。
改进多变量广义最小方差解耦控制方法及应用
Feb. 2021Vdl.2& No.22021年2月 第28卷第2期控制工程Control Engineering of China文章编号:1671 -7848(2021 )02-0375-07DOI: 10.14107".cnki.kzgc.20180279改进多变量广义最小方差解耦控制方法及应用刘进进,周平,李明杰(东北大学流程工业综合自动化国家重点实验室,辽宁沈阳110819)摘 要:针对现有多变量广义最小方差解耦控制方法不能直接抑制有界可测干扰的问题,以及另加前馈控制器带来的结构复杂且成本增加的难题,提出一种改进的多变量广义最小 方差解耦控制方法。
所提方法通过在加权多项式矩阵和丢番图方程中的多项式矩阵同时引入积分项,用于直接抑制工业过程中有界可测干扰对系统的影响,从而消除稳态误差,提 高控制精度。
数值仿真以及在双容水箱液位控制半实物仿真平台的实验验证表明了所提方法的有效性和实用性。
关键词:多变量广义最小方差解耦控制;液位控制;有界可测干扰;半实物仿真实验中图分类号:TP18 文献标识码:AImproved Multivariable Generalized Minimum Variance Decoupling Control Method andIts ApplicationLIU Jin-jin, ZHOU Ping, LI Ming-jie(State Key Laboratory of Synthetical Automation for Process Industries, Northeastern University, Shenyang 110819, China)Abstract: In view of the problem that the existing multivariate generalized minimum variance decoupling control method can not directly restrain the bounded measurable disturbance, and the complex structure andincreased cost brought by feedforward controller, an improved multivariable generalized minimum variancedecoupling control method is proposed. By introducing the integral terms in the weighted polynomial matrixand the polynomial matrix of the Diophantine equation, the proposed method is used to directly restrain theinfluence of bounded measurable disturbance on the system in the industrial process, thus eliminating the steady-state error and improving the control accuracy. The numerical simulation and the experimentalverification on the semi-physical simulation platform for the control of the liquid level in the double capacitytank demonstrate the effectiveness and practicability of the proposed method.Key words: Multivariable generalized minimum variance decoupling control; liquid level control; boundedmeasurable disturbance; semi-physical simulation experiment1引言在复杂的工业生产过程中,被控对象一般是由 多输入多输出的多变量动态模型描述的。
多变量预测控制在异构脱蜡装置中的应用
多变量预测控制在异构脱蜡装置中的应用
刘文林;李俊;邵应平;杨阳;贾建峰;路嗣恩;靳永勇
【期刊名称】《煤化工》
【年(卷),期】2024(52)2
【摘要】介绍了潞安公司异构脱蜡工艺及控制现状,针对煤基油各单元物料平衡采用常规PID控制效果不理想的问题,采用多变量预测控制(MPC)技术对其进行改造,结合工艺人员实操经验进行建模和控制器设计,实现了对异构脱蜡装置全流程的精细化控制。
工业应用效果表明:MPC系统投用后,可稳定加热炉出口温度,优化塔内温度分布和稳定控制关键设备液位,关键被控工艺参数标准偏差降低35%以上,各基础油的产量、质量均得到有效提升。
【总页数】4页(P38-41)
【作者】刘文林;李俊;邵应平;杨阳;贾建峰;路嗣恩;靳永勇
【作者单位】山西潞安煤基清洁能源有限责任公司;山西星枫智控科技有限公司【正文语种】中文
【中图分类】TE624
【相关文献】
1.多变量预测控制在乙醛精制装置中的应用
2.多变量预测控制在空分装置自动变负荷中的应用
3.多变量预测控制在异构脱蜡装置加热炉中的应用
4.CLG异构脱蜡催化剂在中海油惠州石化40万t·a^(-1)加氢异构装置上的工业应用
5.异构脱蜡装置MPC模型预测控制应用探讨与分析
因版权原因,仅展示原文概要,查看原文内容请购买。
改进粒子群算法在多目标机炉协调控制中的应用
( 华北 电力大学 控制与计算机工程学院 ,河 E保定 0 10 ) 70 3
摘要 :应用改进 的粒子群 算法对 单元机 组 多 目 协调 优化 控制 问题 进行 了研 究 。为 了提 高粒 子群 算法 标 PO ( aie wr pmzi ) 的收 敛性 ,引入 了选择机 制 ;同时为 了平衡 P O算 法的全局搜 索能力 S Pr l S a O t i tn t m c i ao S
. )= l1 厂 ( 人J( )+ 2 (, A,( A / / )+ 33 )+ 4 u 6 A.( )( ) ,
和局部 改良能力 ,提 出了一种 构造惯 性权 重的 方法。 以 10MW 燃 油锅 炉汽轮发 电机 组动 态模 型 为例 , 6
进行 实例仿 真,所得 结果验证 了本算法的 实用性 、有效性 。 关键词 :改进粒子群 算法 ;火电机 组 ;多目标优 化 ;协调 控制
中 图分 类 号 :T 23 P 7 文献 标 识 码 :A
。
1 多 目标 协调控 制优化模 型
火 电单元机组多 目标优化协调 控制策略的关 键是通过一个多 目标优化 的非线性 映射对锅炉 和 汽轮机发 电机组进行 协调控制。该 映射 可描述为
收稿 日期 :2 1 0 2 。 0 1— 7— 9
.( )=l — I , u 。 El E d ( ): 1 U .( , )= 一 3 2
影 响 。从 整个 热力 系 统 优 化 运 行 的角 度 来 看 ,优 为时间。单元机组模型 的多 目标优化函数可 以描 化控制的 目标应该是 多方面的。如对火 电单元机 述 为
组的 自动发 电控制 ( G )来说 ,合理 的 目标除 求最优化目标 =[。 :…, T AC , , u] 了要保证机组 的实发功率快 速跟踪 目标负荷 外 , mn ( ={ ) ( , , ( ) i ) -( , ) … J “ } J , k
多变量自校正解耦PID控制器
多变量自校正解耦PID控制器
余文;柴天佑
【期刊名称】《控制与决策》
【年(卷),期】1995(10)2
【摘要】将前馈解耦控制与自校正PID控制相结合,提出了多变量自校正解耦PID控制器。
该控制器适于具有任意延时结构和非最小相位系统,本文利用根轨迹法证明了这一算法的全局收敛性。
【总页数】5页(P175-178)
【关键词】多变量解耦;自校正控制器;PID控制器
【作者】余文;柴天佑
【作者单位】东北大学自动化研究中心
【正文语种】中文
【中图分类】TP273.2
【相关文献】
1.基于忆阻的自适应单神经元多变量解耦PID控制器 [J], 方晓燕;王丽丹;段书凯
2.未知或变时滞系统的多变量解耦极点配置自校正PID调节器 [J], 邓自立;黄先日
3.多变量自校正PID调节器与自校正控制器的关系分析 [J], 马文贵
4.多变量解耦极点配置自校正PID控制器 [J], 邓自立;黄先日
5.一种多变量自校正前馈解耦PID控制器及其应用 [J], 张贵军;柴天佑;余文
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
多变量FOPID-MAC在机炉协调控制中的应用郭伟。等 多变量FOPID—MAC在机炉协调控制中的应用 Application of Multiva riable Fractional Order PID—MAC in Boiler—tu rbine COOrdinated Control
郝 江苏省气象能源利用与控制工程技术研究中心 ,江苏南京 伟 , , 互汉在 夏友麂 郁德渡 (江苏省大气环境与装备技术协同创新中心 ,江苏南京210044; 210044;南京信息工程大学信息与控制学院 ,江苏南京210044) 摘要:为了克服火电单元机组机炉协调控制中的多变量、强耦合、强干扰、大时滞等问题,提f_fj了一种在状态空间方程彤式下的多 变量模型算法控制(MAC)与分数阶PID(FOPID)控制相结合的新型模型预测控算法MFOPID—MAC,并利用李雅普诺夫第二方法证明 该算法推导m的控制律可以保证系统闭环稳定。将改进的多变量FOPID—MAC算法应用于火电单元机组的机炉协调控制系统,并进 行阶跃响应、抗干扰仿真实验与绝对误差积分指标分析。仿真结果充分显示多变量FOPID—MAC控制方法具有良好的设定值跟踪特 性与静态特性、较强的鲁棒性与满意的抗干扰性。 关键词:模型算法控制(MAC) 分数阶PID控制 多变量模型性能分析Matlab仿真 中图分类号:TH89;TK323 文献标志码:A DOI:10.16086/j.cnki.issnl000—0380.201508018 Abstract:In order to overcome the problems in boiler—turbine coordinated control for fossil fired power unit,e.g.。multiple variables,strong coupling and disturbance,and large time delay,ete.,the new type of multi—variable model predictire control algorithm MFOPID—MAC which combines the multi—variable model algorithm control(MAC)and fractional—order PID(FOPID)is proposed.By adopting Lyapunov the second method,it is verified that the control law derived from the algorithm can ensure the closed loop stability of the system.Step response and anti— disturbance simulation experiments of the improved MFOPID--MAC are carried out in boiler--turbine coordinated control system of fossil fired power unit,and the integral absolute error index is analyzed.The results of simulation show that the multi—variable FOPID—MAC method has satisfactory set-point tracking and static characteristics and good robustness as well as disturbance rejection capability. Keywords:Model algorithmic control(MAC) FOPID control Muhivariable model Performance analysis Matlab simulation
0 引言 火电单元机组协调控制是典型的多输入多输出系 统,伴随着电网和单元机组容量的不断扩大,用户对用 电质量要求的不断提高,研究多变量控制策略在热工过 程中的应用愈加重要 。目前,国内火电机组的协调 控制方法有传统PID控制、动态矩阵控制策略、模糊解 耦合策略、采用对象特性的在线预估补偿方法等 。 。 本文将状态空间方程形式下的多变量模型算法控 制与分数阶PID控制算法相结合,提出了一种新型的 多变量控制策略——多变量PID模型算法控制(multi— variable fractional—order PID model algorithmic control, MFOPID—MAC),并以某300 MW燃煤直流锅炉再热机 组为模型,在Matlab中进行仿真实验。研究表明, MFOPID—MAC控制器在不同负荷条件下都能保证被
江苏省高校大学生创新创业项目(编号:20l4103o0O34z)。 修改稿收到日期:2014—12—11。 第一作者郭伟(1960一),男,1987年毕业于山东工业大学工业自动 化专业,获硕士学位,教授;主要从事预测控制和电力系统控制等方面的 教学与科研工作。
《自动化仪表》第36卷第8期2015年8月
控量快速平稳地追踪设定值,静态性能优异,且对外部 干扰具有良好的抑制效果。
l基于状态空间形式的多变量MAC算法 模型算法控制(model algorithmic control,MAC)是 预测控制中具有代表性的典型控制算法,具有预测模 型、反馈校正和滚动优化的基本特征 。设被控对 象有m个控制输入、n个输出,建模时域为Ⅳ,控制时 域为 ,预测时域为P,则多变量MAC预测模型取如 下的状态空问方程形式: 』 m( )=A m( 一 )十曰m ( 一 (1) 【 (k)=C X (k) 式中: (k)=[ (k), (k),…, (k)]‘;U(k)= [M ( ),M:(k),…,M (k)] ;Y (k)=[Y 。(k), (k),…,Y (k)] ;A 、曰 、C 分别为预测模型状态 方程的系统矩阵、输入矩阵和输出矩阵。 递推推导求得预测模型输出为: l, (k+P)=C…X( +P)=C…A PX( )+
69 多变量FOPID.MAC在机炉协调控制中的应用 郭伟,等 C XA B ( +i)=C…A PX(k)+G U(k)(2) 式中:G =C 【A ’B ,AmP 2B ,…,B 】;U(k)= [U(k),U(k+1),・一,U(k+P一1)] 。 在n个输出的对象中,若取参考轨迹为一阶指数 形式,则( 十i)时刻参考轨迹为:
y,( +i)=C(k)一A [C(k)一y ( )] (3) 式中:C(k)为设定值矩阵,C(k)=[c (k),…, C ( )] ;A‘=[A ,…,A ]。 ,A =e ,是指参考 轨迹衰减因子, 为采样时间, 为第12个输人参考 轨迹的预期响应时间。 为了减少由外部扰动和模型误差引起的多步预测 误差,在多变量系统中,采用如下反馈校正: E( +1)=hE( )= (k)一 (k) (4) 式中:层( +1)=[e (后+1),e2(后+1),…,e ( + 1)] ,e (k+1)=e (k)=y (k)一Y ( ),i=1,2,…, n; (k)=[ 。( ),Yp (k),…,), (k)] ;Ym(k)= [Y 。(k),Y (k),…,Y (k)] ;h为系统的误差校正 矩阵。 那么,未来P时刻预测模型被修正为: y (k+P)=Y (k+P)+E(k+i) (5) 并令Yp(k+P)=Y (k+P)。 多变量MAC目标函数二次型性能指标形式如下: J(k)=[r( +P)一Yr(k+P)] ×Q× [y (k+P)一Y (k+P)]+U (k)RU(k) (6) 令 =0,得: ( )=[R+GTQG ] G TQ× [c X (k)+Y,( +P)一C AeX (k)+y ( )](7) 2多变量FOPID-MAC控制算法与鲁棒I生分析 2.1分数阶PID控制理论 1999年,Podlubny I设计了分数阶PI D 控制 器¨ 。它比传统PID控制器多了2个可调参数,使得 控制器设计更加多变灵活,性能更优越。 设A为积分阶数(A>0), 为微分阶数( >0), 、K 、 为控制器参数,分数阶PID控制器的表达 式为: “(t)=K e(t)+K D 一 e(t)+ dD e(t) (8) 式中:D ~= ,D = ,其中A、 为任意非负 实数。 70 通过拉氏变换得到控制器的传递函数为 : c㈠= 一 _^+ (9) 将式(8)写成离散形式: M(k)=K。e(t)+ 磊q e( 一 )+Ka J∑ e( 一 ) (10) 式中: 为时间步长;g,和d为二项式系数,取值为q。=
1, :(1一半) ,do=1, :(1一 ) …
易得: u(k一1)=K。P( 一1)+
KiT A  ̄-, ( 一1一 )+ d 磊 e( 一1一 )(11) 将式(1o)与式(11)相减,得到分数阶PID的增量 式表达式: Au(k)= (k)一/2(k一1)= K Ae( )+(K。 +K )e(k)一 砉( K。 + I)e(K-j)(12)
令Ka:Ki +KdL- , :一(L K. 一,+
K 。),式(12)可简化为: △“( )=K Ae(k)+Kae( )+l∑ e(后一 )(13) 2.2多变量FOPID-MAC控制算法 现将FOPID控制和多变量MAC控制策略结合起 来,使FOPID—MAC控制器既拥有分数阶比例、积分和 微分的广义结构特点,又拥有MAC的预测功能。将多 变量FOPID—MAC的目标函数取为:
J=min[KaE ( )QE(k)+K。AE ( )QAE ( )十 三 E T(k)QEj( )+U (k)RU(?c)] (14) 式中:正定矩阵Q和R分别为误差加权因子和控制量 加权因子;Kp为比例系数矩阵;Ko、 为分数阶的积分 与微分系数矩阵,且有 =砉(L K。 q +L ×
” ),K。:K +K , ,其中K,、 分别为整 数阶积分、微分系数矩阵,A和 为分数阶积分与微分
参数,q。:1, :(1一 )qj-1, =1, =(1一 L )d ,T为采样时间;E( )为预测误差,AE( )
为预测误差的增量,E ( )=E(k一 ),可由递推关系 得到。
E( )=[ ( +1),…,E ( +P)] PROCESS AUTOMATION INSTRUMENTATION Vo1.36 No.8 August 2015