AGV技术协议
SIASUN's AGV 车体控制系统及其主要部件

三个接触器和三对汇流排
• 三对汇流排分别称为XTB,XTC和XTS,是工控机和伺服放 大器取电的端排。
• *XTB为上保险丝后XTB上有48V。从电池取电的总汇流排, 它的前面接有一个125安培的保险丝,连接
• *XTC为DC-DC电源取电的汇流排,即为工控机和运动控制 器上电。
6、 无线通信系统
• 控制台与各个AGV车体 之间通过无线局域网进行 通信。
• 通信协议遵守 IEEE802.11x 标准
7、 操作界面
• 人机交互界面作用:
– 输入命令,选择工作模式; – 查看设备状态 – 设置参数 – 监控运行状态
第二部分: AGV运动控制系统原理
AGV的车轮控制采用双闭环,即速度环和位置环。 *速度环为内环通过伺服给定信号与连接在电机轴上的测速机的反馈信号进行 调速。 *位置环为外环它的控制基于位控板(MCU50),位控板给出信号要求AGV走出一 定的位置,它的反馈信号通过连接在电机轴上的码盘返回。
三个接触器和三对汇流排
•三个接触器为直流48V符号为K1,K2和K3, 分别控制工控机,伺服和充电器的上电。
• *K1接触器用于控制XTC汇流排的上电, 它的线包通过带锁钥匙开关相连。当 打开面板开关,K1接触器吸合XTC上 电,即AGV控制器上电。
• *K2接触器用于控制XTS汇流排的上电, 它的线包通过VCU300、MCU50与急停 按钮连接,但松开急停后,若CAN通 信正常K2接触器吸合XTS上电,即伺 服上电。
导航系统包括两个导航传感器和一个地标传感器 导航传感器位于车体前侧和后侧用于查找地面磁条 校正车体姿态 地标传感器位于车体侧面用于查找地标使AGV精定 位停车
agv系统介绍-讲解学习

2 AGV新技术讨论
无接触能量传输? 多AGV协同工作? 墙壁导引?
多驱动轮? 新能源? 动态路径?
3
AGV系统
构成
3
构成
• AGV调度计算机 • AGV监控计算机 • AGV车辆
3
构成
3 AGV控制系统结构
3
AGV系统
平台结构
3
平台结构
• 平台本身和具体的应用项目相互独立。
– 平台包括构成平台的各种软件, – 应用项目则是使用平台提供的软件根据具体应用项目的需求
公司长远发展的需要
2000年6月,分别由国防科工委、云南省科技厅、昆 船集团公司正式立项,于2004年10月分别完成了国防 科工委及云南省的AGV系统科技攻关项目。
从2004年5月开始,昆船公司利用自主AGV技术先后成 功实施了多个不同导引形式的AGV工程项目,均受到用 户的好评。
2
昆船自主AGV技术达到的目标
• 系统诊断 – 事件信息显示、存盘 – 状态信息显示、存盘 – 底层通信数据存盘
≥10 辆
系统通讯:
无线以太网
系统可靠性:
≥97%
ATIS的系统设计
设计思想
AGV应用项目
AGV资源模型
2
用户对导引形式,驱动形式的偏好源自用户不同执行机构的需求 运行路径的复杂多变和持续完善
用开发平台描述和构建AGV项目
运行流程的复杂多变和持续完善 外围协作设备的多样性
用运行平台执行和实现AGV项目
2
特点
• 4.安全可靠:AGV系统有专门的软件模块控制整个系 统的交通,再加上各台AGV车辆上安装的防碰撞机构, 能够保证车辆之间以及车辆与环境物体之间的安全。 由于物料是放置于专门的托盘上由AGV进行运送的, 所以能够保证物料在运送期间的安全,避免因为运输 时的碰撞而造成的损失。由于AGV系统的运行过程不 需要人工干预,因此不仅可以节省劳动力,还能够避 免人为因素对生产的影响。
AGV专用控制器说明书

MMT-DPWDC48DPW50BL-PC2智能控制器使用说明书`济南科亚电子科技有限公司在使用本产品前请您详细阅读本使用说明书。
由于不遵守该使用及安装说明书中规定的注意事项,所引起的任何故障和损失均不在厂家的保修范围内,厂家将不承担任何相关责任。
请妥善保管好文件,如有相关疑问,请与厂家联系。
安全注意事项·请专业技术人员进行安装、连接、调试该设备。
·在带电情况下不能安装、移除或更换设备线路。
·请务必在本产品的电源输入端与电源(电瓶)之间加装必要的保护装置,以免造成危险事故或致命伤害;需要加装:过流保护器、保险、紧急开关。
·请做好本产品与大地、设备之间的隔离及绝缘保护。
·如确实需要带电调试本产品,请选用绝缘良好的非金属专用螺丝刀或专用调试工具。
·本产品需要安装在通风条件良好的环境中。
·本产品不能直接应用在高湿、粉尘、腐蚀性气体、强烈震动的非正常环境下。
该标志表示一种重要提示或是警告。
目录一、概述.......................... 错误!未定义书签。
二、规格及型号..................... 错误!未定义书签。
三、产品特性....................... 错误!未定义书签。
四、性能指标....................... 错误!未定义书签。
五、外形尺寸....................... 错误!未定义书签。
六、接线要求....................... 错误!未定义书签。
七、控制器端子接线说明及端子功能示意图错误!未定义书签。
八、直流无刷电机的连接及说明....... 错误!未定义书签。
九、控制器工作模式说明............. 错误!未定义书签。
十、LED指示灯状态说明.............. 错误!未定义书签。
十一、公司地址及联系方式.......... 错误!未定义书签。
COMMSEN(科讯)AGV小车无线通讯系统方案
COMMSEN(科讯)AVG小车无线通讯方案AGV叉车无需配备驾驶员成本和作业效率大大提高,而且避免了很多人工作业的危险性,在智能化自动化高速发展的大背景下,人工搬运向自动化搬运是大势所趋,越来越多的企业选择AGV叉车机器人来替代传统叉车,通过中控调度系统,AGV车也可以快速的完成内部物流自动化作业与现场的WMS、ERP等系统对接。
对于AGV车来说一套安全稳定的通信控制系统尤为重要,COMMSEN(科讯)无线通信产品解决方案具有抗干扰能力强、传输距离远、漫游切换速度快、系统安全可靠、高负载和多通道通信能力等特点。
我们提供针对客户行业特点的定制化产品和技术方案,可提供AGV小车用WIFI模块、车载无线终端、无线基站设备以及控制系统。
一、项目需求某工厂生产线新建立一套生产系统,采用AGV小车、叉车来代替传统工人作业,需要配套的控制系统全面升级,实现智能化,自动化,系统二、要求1、AGV小车和堆垛机工作过程中,信号无中断,行进路线做到无盲区无线覆盖2、车载设备小巧灵活,安装方便3、AGV小车在移动过程中能够快速切换,无缝漫游三、方案设计根据现场作业区的规划和移动车载的行进区域,我们计划采用4套COMMSEN(科讯)无线基站设备完成工作区的覆盖,每台AGV小车集成1台COMMSEN(科讯)无线车载设备,完成在多个AP之前的快速漫游切换。
设备安装调试完毕后,经过实际运行,完全满足业主的要求,受到业主的好评。
四、选型产品802.11ac/gn双频千兆机载移动通信无线终端KX8211-S600IR是一款符合802.11ac并兼容IEEE802.11ac/gn标准的无线网络设备,同时支持5.8GHz和2.4GHz频段,采用802.11n MIMO 双极化技术,提供1170Mbps的数据传输速率。
设备采用全铝机身、外观设计紧凑小巧且具有很好的散热、抗电磁干扰及防尘性能。
设备性能优异,为移动车载、机器人应用提供了高带宽、高性价比的解决方案。
AGV产品网络安全认证
AGV产品网络安全认证随着技术的发展和应用的普及,AGV(Automated Guided Vehicle)产品的网络安全认证变得越来越重要。
在实施网络安全认证时,有几个重要的方面需要考虑,以确保AGV产品的网络安全性。
首先,AGV产品的通信协议和数据传输需要加密保护,以防止未经授权的访问和信息泄露。
采用强大的加密算法可以保证数据的机密性和完整性,防止黑客窃取信息或篡改数据。
同时,还可以使用认证机制,如数字证书或双因素认证,以确保通信是受信任的。
其次,AGV产品的操作系统和软件需要经过严格的安全审查和测试。
应该确保操作系统和软件没有漏洞和弱点,以防止黑客利用这些漏洞进行非法操作。
需要定期更新和升级操作系统和软件,以修复已知的漏洞,并及时响应新发现的安全问题。
此外,AGV产品的网络接入点需要受到有效的访问控制和防火墙保护。
只有经过身份验证和授权的用户才能访问AGV系统,其他未经授权的用户将受到限制或阻止。
防火墙应该设置合适的规则,过滤和检测网络流量,以防止恶意攻击和入侵。
最后,为了保证AGV产品的网络安全,还需要进行定期的安全评估和渗透测试。
安全评估可以评估系统的安全性并识别潜在的风险和漏洞,而渗透测试可以模拟真实的攻击,并检测系统在面对攻击时的表现。
通过这些测试,可以及时发现和修复安全问题,提高系统的强壮性和鲁棒性。
总之,AGV产品的网络安全认证是确保系统安全的重要一环。
通过加密通信、安全审查、访问控制和安全评估,可以有效地保护AGV产品免受网络攻击和威胁。
只有确保AGV产品的网络安全性,才能保障系统的可靠性和稳定性。
AGV小车构成方案
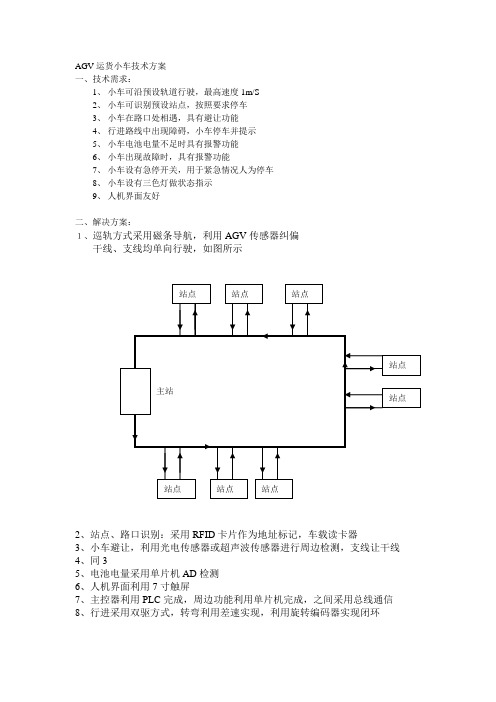
AGV运货小车技术方案一、技术需求:1、小车可沿预设轨道行驶,最高速度1m/S2、小车可识别预设站点,按照要求停车3、小车在路口处相遇,具有避让功能4、行进路线中出现障碍,小车停车并提示5、小车电池电量不足时具有报警功能6、小车出现故障时,具有报警功能7、小车设有急停开关,用于紧急情况人为停车8、小车设有三色灯做状态指示9、人机界面友好二、解决方案:1、巡轨方式采用磁条导航,利用AGV传感器纠偏干线、支线均单向行驶,如图所示2、站点、路口识别:采用RFID卡片作为地址标记,车载读卡器3、小车避让,利用光电传感器或超声波传感器进行周边检测,支线让干线4、同35、电池电量采用单片机AD检测6、人机界面利用7寸触屏7、主控器利用PLC完成,周边功能利用单片机完成,之间采用总线通信8、行进采用双驱方式,转弯利用差速实现,利用旋转编码器实现闭环三、小车控制电路构成电源管理电路功能主要是检测电源电压欠压输出信号给PLC、利用运算放大器作比较器实现,输出用NPN三极管OC输出;直流驱动采用继电器与MOS 管配合,由PLC直接驱动;RFID单元利用单片机读取“读卡器信息”有卡时输出信号给PLC,由PLC主动读取信息。
充放电采用双向钥匙开关。
四、运行模式主站利用触摸屏进行运行编排:即小车需要至哪几个站点送货或取货编排完成后按下出发钮,小车出发,沿轨道行进至第一个站点第一个站点完成装货后,按下出发钮,驶向第二个站点直到最后一个站完成,回到主站DVP40EH11T2+485-232卡RFID用单片机读取后得到地址通过MODBUS发送给PLC 直流电机驱动器采用继电器+IGBT方式,。
AGV装配线技术方案
长安福特汽车有限公司南京公司Changan Ford Automobile Co., Ltd. Nanjing Company发动机、前后桥AGV系统Engine & Axel AGV System技术方案Technical Plan沈阳新松机器人自动化股份有限公司Shenyang SIASUN Robot & Automation Co., Ltd.目录Contents1. 概述Summary (5)2. 设计依据Design Gist (5)2.1 生产工艺基本要求Basic Requirement of Production Process (5)2.2 现场基本技术条件Basic Field Technical Condition (6)2.3 责任范围Responsibility Scope: (6)3. AGV装配输送系统概述AGV Assembly & Transportation SystemSummary (7)4. 自动导引车AGV系统技术指标Automated Guided Vehicle AGV SystemTechnical Specification (9)5. AGV工作过程描述AGV Working Process Description (11)6. 发动机装配升降工作台Engine Assembly Lifter Worktable (14)6.1 伸缩套筒式升降工作台Extension Sleeve Lifter Worktable (14)6.2 剪式液压机构升降工作台Scissor Hydraulic Lifter Worktable (16)6.3 托盘底面距发动机最高点距离与升降平台高度关系计算Calculation onthe Relation Between Distance from Pallet Bottom to Engine Zenith and Height of Lifter Table (19)7. 后悬装配举升装置Rear Suspension Assembly Lifting Equipment (22)7.1 伸缩套筒式升降工作台 (22)7.2 剪式液压机构升降工作台Scissor Hydraulic Lifter Worktable (24)7.3 升降平台上平面到地面的高度计算Calculation on the Height from thePlane of the Lifter Table to the Ground (26)8. 不同轴距车体装配实现Body of Different Wheelbases AssemblyRealization (28)9. AGV 动态装配解决方案AGV Dynamic Assembly Solution.. 2910. AGV 主要设备AGV Main Equipment (29)10.1 AGV(LGV)车载控制器 AGV(LGV)Vehicle Controller (29)10.2 AGV(LGV)驱动系统AGV(LGV)Drive System (30)10.3 导航系统Navigation System (30)10.4在线自动充电系统Online Automatic Charge System (32)10.5无线局域网通讯系统 Wireless LAN Communication System (33)10.6驱动控制系统Drive Control System (34)10.7非接触防碰装置Non-contact Bumper Device (35)11. AGV安全系统AGV Safety System (35)11.1非接触防碰装置Non-contact Bumper Device (35)11.2接触式防碰装置 Contact Bumper Device (36)11.3离线保护系统 Offline Guarding System (36)11.4信息交互系统 Information Exchange System (36)11.5紧急停车系统Emergency Stop System (37)11.6多AGV避碰 Multi-AGV Collision Prevention (37)12. AGV控制台和调度管理系统AGV Console & Dispatching Management System (37)12.1 AGV控制台AGV Console (37)12.2调度管理系统Dispatching Management System (38)13. AGV车载控制系统和数据采集AGV Vehicle Control System & Data Collection (40)14. 导航线的铺设Navigation Line Paving (41)15. AGV系统特点AGV System Characteristics (42)15.1 高速无线局域网的建立和应用 Setup and Application of High-speed Wireless LAN (42)15.2 AGV运行的灵活性Flexibility of AGV Running (43)15.3 高精度导航系统High Accuracy Navigation System (43)15.4 友好的人机界面User Friendly Human Machine Interface (44)15.5 完善的自诊断系统Perfect Self-diagnosis System (44)15.6 AGV可靠性措施Measures on AGV Reliability (44)15.7 在线快速自动充电方法和快速充电电池的应用Online Automatic Instant Charge Method and Application of Instant Rechargeable Battery (46)15.8 故障修复时间(MTR)Mean Time of Repair(MTR) (47)AGV系统的故障修复时间有两类:There’re two kinds o f MTR for AGV system: (47)15.9 平均无故障时间(MTBF)Mean Time To Failures(MTTF) (48)16. AGV运行路线图AGV Running Route Graph (48)16.1 装配线AGV运行布局图 Assembly AGV Running Layout (48)16.2 样机车间AGV运行布局图 Sample Workshop AGV Running Layout . 48 18. 环行装配线AGV系统设备清单Circular Assembly AGV System Equipment List (51)19. 项目进度Project Schedule (53)20. 培训Training (53)20.1 培训人员的范围、数量及时间Scope, amount and time for training people (54)20.2 培训的内容Training content (54)21. 售后服务After-sale service (55)1. 概述Summary根据长安福特汽车有限公司南京公司发动机、前后桥AGV系统的设计要求,新松公司采用的装配型AGV系统进行发动机、前后桥与车身合装,具有同步动态跟踪功能的AGV可实现发动机、前后桥在装配段任何工位同时装配。
AGV物流搬送技术方案
技术协议书TECHNICAL AGREEMENTAGV物流运输项目甲方:福建台亚汽车工业有限公司乙方:福州仕东科技有限公司日期:2019年1月3日1.设计依据及节拍分析1.1.项目背景本项目基于工厂智能化、物流自动化的思想,基于JIT准时制精益物流理念,采用准时输送并与生产线自动对接的方式进行物料的配送。
物料配送采用AGV小车(自动导航小车)代替人工搬运,实现工厂物料物流自动化,以达到降低成本和提高生产效率的目的。
1.2.节拍计算1.2.1物流节拍分析需求1台AGV项目数量单位备注AGV1台双向单驱潜伏牵引磁导航AGV手动充电系统1套手动充电一套中控系统1套含中控系统硬件和软件各一套辅助系统1套磁条、地标等1.3.现场车间环境信息电源电压:交流380V±10%50Hz±5%三相四线控制电路:AC220V x50Hz或DC24V使用环境:作业温度:-5℃~50℃环境湿度:60%~90%2.物流系统构成概述该物流任务主要由配送系统和AGV本体构成;AGV部分由潜伏牵引式AGV及车载控制系统AGV呼叫配送系统主要由配送控制由无线遥控模块构成,周边设备器材包括手动充电等。
整个系统由AGV小车、呼叫系统、安全保障系统、电力系统、以及其他配套硬件系统组成。
呼叫系统负责AGV任务线路切换。
AGV小车是物料转运载体,完善的通讯系统与AGV之间的通讯保证。
安全保障系统用来保证AGV小车之间及AGV与其他硬件设施不发生碰撞,地面系统是基于磁导航AGV 所铺设的AGV引导磁条与相应位置的RFID站点卡,电力系统保证AGV的运行和电力的补充,其他配套硬件系统包含AGV本身搭载的机构以及与AGV小车配合的料车机构等。
2.1.工艺规划图例:配送线路2.1.1配送系统本系统AGV方案是牵引式AGV小车,牵引重量最大500kg。
任务触发由装载物料的工作人员触发;任务触发后,需要人工完成物料的装载、运输、卸载,与AGV的待命点返回;●AGV路径设计,以减少车辆和人行的堵塞时间、改善AGV交通装置为目的,AGV小车在行驶路线上均是平等、自由的。
基于无线通讯的AGV设计与实现
基于无线通讯的AGV设计与实现一、引言二、AGV基本原理AGV是自动导引车(Automated Guided Vehicle)的缩写,是一种能够自动进行载货、运输、装卸等操作的无人车辆。
其基本原理是借助导航设备或系统,使车辆能够智能地进行路径规划、避障、定位等操作,从而实现货物的自动化搬运。
在AGV的运行过程中,无线通讯技术起着至关重要的作用。
AGV需要通过无线通讯技术与中央控制系统进行实时的通讯和数据交换,以获取最新的任务指令和地图信息。
AGV 之间也需要进行无线通讯,以实现团队协作、避障等操作。
基于无线通讯的AGV设计与实现,需要考虑通讯的稳定性、实时性、安全性等问题,以确保AGV的正常运行和智能化操作。
三、基于无线通讯的AGV设计要点1. 通讯模块选择在设计AGV的无线通讯系统时,首先需要选择合适的通讯模块。
通讯模块的选择需考虑以下几个方面:通讯距离、通讯速率、通讯稳定性、通讯功耗等。
一般而言,蓝牙、Wi-Fi、ZigBee等无线通讯技术被广泛应用于AGV中,各有其适用的场景。
2. 通讯协议设计通讯协议是确保AGV与中央控制系统之间或AGV之间能够正确地进行数据交换和通讯的重要手段。
在设计无线通讯系统时,需要考虑通讯协议的设计。
通讯协议的设计需要围绕通讯数据的格式、数据传输的方式、数据校验的方式等方面进行规划和设计。
3. 避免干扰与冲突在无线通讯的设计中,需要考虑避免通讯信号的干扰和通讯冲突问题。
通过合理的频率分配、通讯时序的设计等手段,避免不同AGV或不同通讯设备之间的通讯冲突,以确保通讯的稳定性和可靠性。
4. 安全性设计无线通讯技术在应用于AGV中时,安全性是一个不容忽视的问题。
在设计AGV的无线通讯系统时,需要考虑安全加密等问题,以确保通讯数据的安全性和可靠性,避免因通讯泄露、篡改等问题导致的安全风险。
1. 单车AGV实现方案在设计单车AGV时,无线通讯系统主要面向中央控制系统。
通过选用合适的通讯模块,设计合理的通讯协议,实现AGV与中央控制系统之间的稳定、实时的数据传输和通讯。
“挑战杯”科技成果转让协议书
新乡学院 大学生科技成果转让协议书
转让方: 受让方: 鉴于:“智能搬运机器人”是转让方开发和研制的技术成果,受让方在市场开拓方面的具有完整商务能力,为更好地将成果应用于社会和行业用户,转让方愿意将该项技术成果转让给受让方,且受让方同意接受该技术成果。现本协议书双方经过详细磋商,就技术成果转让事宜达成协议如下: 1“智能搬运机器人”是指:智能搬运机器人所具有的搬运功能,丢失导引目标后再寻找能力,夹取货物时防夹空功能,放置货物的时候智能排序功能,AGV运行时无接触人机安全保护功能,智能充电等功能的技术资料。 2.转让方于本协议生效日将本协议所涉技术成果独家转让与受让方。于该转让日起,受让方拥有技术成果的所有权。技术成果的转让包括但不限于在技术成果的相关权利保护期内下列各项权利: (1)使用权,即以复制、展示、发行、修改、翻译、注释等方式使用技术成果的权利; (2)使用许可权和获得报酬权,即许可他人以前项中规定的部分或者全部方式使用其技术成果的权利和由此获得报酬的权利; (3)修改权,即修改或者授权他人修改技术成果的权利; (4)其它法律、法规规定所享有的权利。 3.转让方应于本协议书生效日将所转让的技术成果全部内容的详尽资料交付于受让方。 (1)该技术资料包括:智能搬运机器人所具有的搬运功能,丢失导引目标后再寻找能力,夹取货物时防夹空功能,放置货物的时候智能排序功能,AGV运行时无接触人机安全保护功能,智能充电等功能的技术资料。 (2)转让方提交的上述技术资料,应使本行业内具有普通技术水平的专业人员能够理解,并能够在此基础上对软件进行修改、维护和再开发。 (3)转让方向受让方提交上述技术资料后,不得继续保留载有该作品的任何资料。 (4)该技术资料应确保受让方能够便利地使用、享有、行使本协议书第1条所述的技术成果及相关权利。 4.转让方声明并保证在本协议书技术成果转让前: (1)所转让的技术成果真实、完整、合法、有效、属于其所有,不存在任何权属争议。 (2)转让方有权转让本协议书所涉之技术成果,且技术成果未存有抵押、质押或其它担保等情形; (3)转让方在本协议书签订前并未将技术成果以任何方式许可或泄露给任何第三方使用或获得利益。 (4)转让方保证所提供的资料是完整、正确、清晰的并保证及时交付。 5.转让方声明并保证在本协议书技术成果转让后: (1)非经受让方书面同意,转让方不以任何方式使用技术成果、授权他人使用技术成果、为他人非法使用技术成果提供任何条件。 (2)转让方应保证技术成果的开发者和转让方及其具有雇佣关系的人员(以下合称雇员)和转让方的关联企业不使用、不许可他人使用技术成果、不为他人非法使用技术成果提供任何条件。如前述雇员或其关联企业有前列任何行为,转让方应就上述该等行为对受让方直接承担责任。 (3)转让方应就所转让的技术成果和技术成果使用者的有关情况以及其他与该技术成果市场有关的商业信息承担保密义务,上述保密义务同样适用于转让方雇员及/或关联企业。 6.受让方的承诺和保证 按本协议书约定的转让金额在约定的付款时间内,全额支付给转让方。 7.受让方应于本协议书生效后三日内向转让方支付转让费人民币伍拾万元整。 8.协议一方违约,应向另一方支付相当于全额转让费10%的违约金,如违约金不足以赔偿守约方因此所遭受的损失,违约方并应赔偿不足部分。 转让方未按第3条的要求向受让方提供资料,受让方有权要求转让方改正;至改正之日止,每逾期一日转让方应向受让方支付相当于全额转让费0.2‰的延期转让违约金。 9.转让方应按受让方要求提供技术成果的技术培训、辅导等相关服务,直至受让方能够独立、正确地使用该技术成果。 11.本协议书生效后,受让方基于本协议书所涉之技术成果的后继开发、改进等技术成果的著作权及相关权利归受让方享有。 12.双方因履行本协议书而提供之文件/资料作为本协议书之附件,构成本协议书的必要组成部分,与本协议书具同等法律效力。 13.未尽事宜经协议书双方协商一致并签订书面补充协议,该补充协议与本协议书具同等法律效力。 14.因履行本协议书而致之争议由双方友好协商解决,协商不成,提交人民法院裁决。 15.本协议书一式两份,自双方签字盖章之日起生效,由协议书双方各执壹份,具有同等法律效力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
AGV系统
技
术
协
议
甲方:
乙方:
2020 年××月××日
技术协议书
甲方:
乙方:
(简称甲方)委托(简称乙方)设计制造AGV 系统,经友好协商,在确保甲、乙双方各项利益不受侵害的前提下,甲、乙双方愿意就轨道电动平车达成如下技术协议,现协议如下:
一、AGV系统设计制造部分引用标准
GB/T30030—2013 自动导引车(AGV术语)
GB/T30029—2013 自动导引车(AGV)设计通则
GB/T13384-1992 机电产品包装通用技术条件
GB 19517-2009 国家电气设备安全技术规范标准
GB14048.2-2001 低压开关设备和控制设备低压断路器
GB14048.4-2003 低压开关设备和控制设备机电式接触器和电动机起动器
GB14048.3-2002 低压开关设备和控制设备第3部分:开关、隔离器、隔离开关及熔断器组合电器
二、设备主要用途说明
该套系统主要用于建筑PC工厂内的钢筋成品的转运。
三、配置
AGV 小车
AGV 小车前后防碰装置
电气控制系统
充电系统
导航系统
设备安装安装基础件
操作工具
AGV调度系统
四、基本技术参数
RGV
五、控制要求:
1.AGV小车采用导航的方式,能够实现前进、后退、转弯功能,整套系统支持OPC Server
通讯协议实现集中调度管理方式,实时监视自动导引车,AGV系统的运行状态,实现
柔性控制。
人工按钮呼叫,AGV运送所需要的工件。
2.顶升机构执行速度可调,支持失电自动制动,故障时及特殊情况下可人工缓降。
六、主要结构要求
1.AGV小车应有相应措施防止发生碰撞。
2.AGV小车应有一套备用人工充电接口和一套手持式充电机,接口位置符合人体工程学,
在在线自动充电检测发生故障或在特殊情况下,可由人工进行充电。
3.AGV控制台与AGV小车之间应采用通讯速度高、抗干扰性好的无线通讯方式,通讯距离
大于1000m。
4.AGV小车应采取软件和硬件措施保证安全工作,AGV小车前后应设置非接触式防碰撞装
置,AGV小车两侧应设置接触式保险装置,AGV小车周边四角均应设置急停开关。
5.AGV小车发生故障无法立即处理完成时,应采取措施保证人工能够省力地将AGV小车推
动下线到合适的维修区域。
6.AGV小车采用四点顶升定位机构,满足规定负载顶升要求,且有超载20%冗余度。
七、AGV电气总装要求
1.电气箱及操作系统设置在容易维护的两侧安全位置,控制箱内部要有线编号。
2.电气柜布局采用冗余结构,布局合理,便于后期维护升级。
九、除锈、涂装要求:
1、钢板、型材、铸、锻件表面除锈应达到G B 8923 中的S t2 级。
对5mm 以下薄板及管材表面除
锈应达到G B 8923 中的B e 级。
2、每层漆膜厚度为25~35µm;漆膜总厚度为75~140µm。
3、漆膜附着力参考G B9286 中2级的检验规定。
4、产品涂装前进行除油、除锈、打磨等工序表面预处理,整体涂防锈漆,涂层总厚度大于
90μm 外露面暂不喷面漆。
十、设备检验实施规定:
1、乙方严格按技术要求及设计图纸进行加工制造,并做好自检记录。
2、把好外协及外购件质量关,主要外购件需提供合格证等。
3、在设备制造过程中,乙方接受甲方对制造质量的定期、不定期检验。
4、设备制造完工,双方共同在乙方厂内对设备进行满载试验总体验收合格后出厂。
十一、质量保证:
乙方保证其提供的设备是全新的、未经使用过的;采用的优质材料和一流工艺;并在各
方面,符合规定的质量、规格和性能;乙方保证其货物经过正确安装、正常操作和保养在合同设备使用期内运转良好。
质量保证期为壹年(交付使用之日起),并对产品实行“三包”。
并可以实现如图的路线。
十二、交货期:
合同生效后 45天交货。
十三、资料交付时间及内容:
1.设备交货时随机提供装箱单、产品合格证、基础安装图、电气原理图纸、产品使用说
明书及易损易耗件、备品备件明细等。
2.应详述该设备的结构和设备的工作原理,外形尺寸、重量、功率等详细技术参数。
3.应提供AGV小车、充电系统和电气控制系统等装置的主要结构图、剖视图等详细资料。
十四、售后服务:
1.供方对设备整体的设计、制造、试运行的整体质量负责,对整体设备项目的设计、安装提
供技术支持。
2.乙方技术人员对甲方人员进行设备使用、维护、保养及故障检测等方面的免费技术
培训。
3.设备质保期从交付使用之日起一年;
4.在使用过程中,出现了技术及质量问题后,接到用户通知2小时内作出答复,24 小时
内派人赶到现场为甲方服务。
5.严格执行I SO 标准,保证产品质量及服务全部合格。
十五、未尽事宜、双方共同协商解决。
甲方:乙方:
代表签字:代表签字:
日期:日期:。