二阶张量坐标变换公式
应力张量例题

= −ab
两个应力张量表示同一应力状态。
一、应力张量不变量及其应用
应力张量不变量问题小结
1、由应力张量的三个主不变量可确定应力张量状态特 、 征方程,从而确定应力张量的三个主应力及其方向,由 征方程,从而确定应力张量的三个主应力及其方向, 此定义了应力的状态。 此定义了应力的状态。 2、判断两个应力的状态是否相同,可以通过判断对应 、判断两个应力的状态是否相同, 的三个主不变量是否相同来实现。 的三个主不变量是否相同来实现。
2 2
2
=±
5 14 3
二、几种重要应力的计算
等效应力
σ=
3 3 1 τ8 = ± 350 = 5 7 2 2 3
MPa
几种重要应力计算问题小 结
要求掌握一点处的主应力及主方向、最大切应力、 要求掌握一点处的主应力及主方向、最大切应力、八 面体应力、等效应力的计算方法。 面体应力、等效应力的计算方法。
n3 = 0
τ max =
八面体应力
1 (σ max − σ min ) = 1 (10 − (−5) ) = 7.5 MPa 2 2
1 3
σ 8 = (σ 1 + σ 2 + σ 3 ) = (10 + 0 − 5) = 1.67 MPa
τ8 = ±
1 3
1 3
(σ 1 − σ 2 ) + ( σ 2 − σ 3 ) + (σ 3 − σ 1 )
一、应力张量不变量及其应用
知识要点回顾 二阶张量的定义: 二阶张量的定义
Pkr = Pij lki lrj
( i, j =1,2,3; k,r =1′ ,2′,3′)
P 11 P 21 P31 P 12 P22 P32 P 13 P23 P33
张量
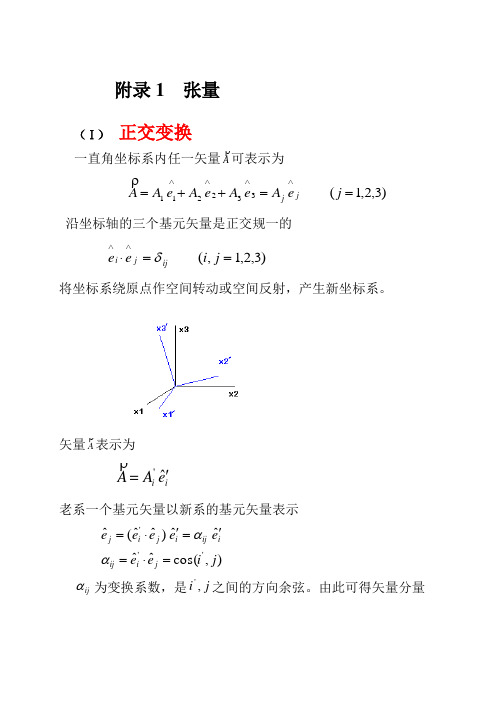
附录1 张量(Ⅰ)正交变换一直角坐标系内任一矢量A可表示为)3,2,1(332211==++=∧∧∧∧j e A e A e A e A A jj沿坐标轴的三个基元矢量是正交规一的)3,2,1,(==⋅∧∧j i e e ijj i δ将坐标系绕原点作空间转动或空间反射,产生新坐标系。
矢量A表示为i i eA A ˆ''= 老系一个基元矢量以新系的基元矢量表示),cos(ˆˆˆˆ)ˆˆ(ˆ'''j i e ee e e e ej i ij i ij i j i j =⋅='='⋅=αα ij α 为变换系数,是j i ,'之间的方向余弦。
由此可得矢量分量之间的变换关系j ij i A A α=' (1)若在坐标变换下,矢量的模保持不变,则为正交变换。
正交变换下,变换系数必有)(,1T kl il ik ααδαα==-在正交变换下(1)式也可作为矢量的定义。
(Ⅱ)二阶张量(二并矢,dyadics )将矢量B A,并列,叫并矢量。
在一坐标系内j i j i j j i i e e B A e B eA B A ˆˆˆˆ==j i e eˆˆ 称为基元二并矢。
因此任一并矢B A是9个基元二并矢的线性组合。
一般地说,若一个量是9个基元二并矢的线性组合则这个量就称为二并矢或二阶张量。
,ˆˆl k kl e eT T =(k,l =1,2,3)在坐标变换下'''ˆˆj i ij e e T T = (i,j=1,2,3)可证明,二阶张量的分量在新老坐标系中的变换关系为kl jl ik ij T T αα='(2)(2)式也可作为二并矢或二阶张量的定义。
二阶张量的代数运算规则: ⅰ)与标量相乘:j i ij e ecT T c ˆˆ)(=ⅱ)同阶张量相加减K e e K e eS T S T j i ij j i ij ij==±=±ˆˆˆˆ)( ⅲ)点乘:b e b ea T e e e a T e a e e T a T i i i j ij k j i k ij k k j i ij===⋅=⋅=⋅ˆˆ)ˆˆ(ˆˆˆˆ T a a T⋅≠⋅ji ij l i k j kl ij l k j i kl ij l k kl j i ij l i il l i jl ij l k j i kl ij l k kl j i ij S T e e e eS T e e e e S T e e S e eT S T K e e K e eS T e e e e S T e e S e eT S T b c b a T b a T =⋅⋅=⋅⋅=====⋅=⋅=⋅⋅=⋅⋅=)ˆˆ)(ˆˆ(ˆ)ˆˆ(ˆˆˆ:ˆˆ:ˆˆˆˆˆ)ˆˆ(ˆˆˆˆˆ)(:定义单位二阶张量j i ij e eI ˆˆδ=TI T T I a I a a I=⋅=⋅=⋅=⋅,对非奇异张量T,即它的行列式不为零,就存在它的逆张量1-T :T TI T T ijij∆==⋅--11,T 是T的行列式,ij ∆为ij T 的代数余子式。
力学中的数学方法-张量-2
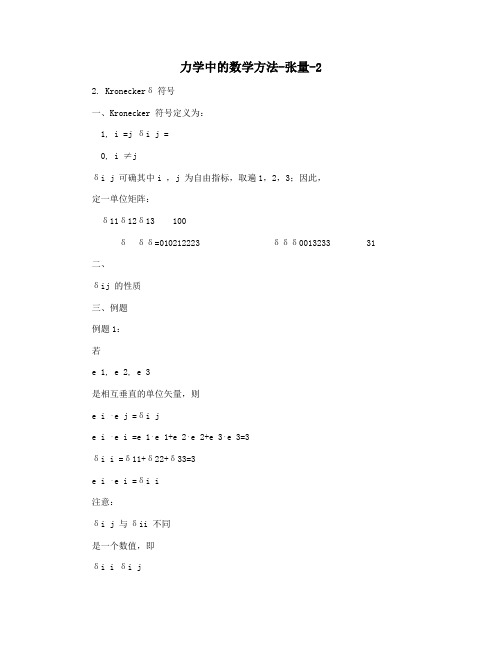
力学中的数学方法-张量-22. Kroneckerδ符号一、Kronecker 符号定义为:⎧1, i =j δi j =⎧⎧0, i ≠jδi j 可确其中i ,j 为自由指标,取遍1,2,3;因此,定一单位矩阵:⎧δ11δ12δ13⎧⎧100⎧⎧⎧⎧δ⎧δδ=010212223⎧⎧⎧⎧⎧⎧⎧⎧δδδ0013233⎧⎧⎧⎧31二、δij 的性质三、例题例题1:若e 1, e 2, e 3是相互垂直的单位矢量,则e i ⋅e j =δi je i ⋅e i =e 1⋅e 1+e 2⋅e 2+e 3⋅e 3=3δi i =δ11+δ22+δ33=3e i ⋅e i =δi i注意:δi j 与δii 不同是一个数值,即δi i δi jδi i =3的作用:1)换指标;2)选择求和。
A i →A kδk i A i =δA k =A k思路:把要被替换的指标i 变成哑标,哑标能用任意字母,因此可用变换后的字母k 表示例题3:T k j →T i jδi k T k j =δT i j =T i j特别地,δi k δk j =δi j , δi k δk j δj m =δi m四、δij符号的应用3. 置换符号(PermutatisnSymbol)e 123=e 231=e 312=1e 321=e 213=e 132=−1e 111=e 121=e 232= =031e i j k⎧1, ⎧=⎧−1, ⎧0, ⎧i, j, k, 为1,2,3的偶置换(123,231,312)i, j, k, 为1,2,3的奇置换(213,132,321)i, j, k, 的任意两个指标相同13e i j k =e j k i =e k i j =−e j i k =−e i k j =−e k j i二、e i j k 符号的应用1).三阶行列式2)、右手卡氏直角坐标系的单位基矢量叉乘若e 1, e 2, e 3是右手卡氏直角坐标系的单位基矢量ei ×e j =? e k =e i jk e k3)例题:证明a ×b = ε ijk ai b j e ke1 a × b = a1 b1e2 a2 b2e3 a3 b3= a2b3e1 − a3b2 e1 + a3b1e2 − a1b3e2 + a1b2 e3 − a2b1e3 = ε 231a2b3e1 + ε 321a3b2 e1 + ε 312 a3b1e2 + ε132 a1b3e2 +ε123 a1b2 e3 + ε 213 a2b1e3= ε ijk ai b j ek11三、常见的恒等式δi l ei j k el m n = δ j l δk lδi1 δi 2 δi 3 δ j3 δk 3δi m δ jm δk mδi n δ jn δk n1) 证明ei j k = ( ei × e j )iek = δ j1 δ j 2 δk 1 δk 2el mn = ( el × em )ien = δm1 δm 2 δn1 δn 2 δl1 δl 2δl 3δl1δm1 δm 2 δm3δn1 δn 2 δn 312δm3 = δl 2 δl 3 δn 32) 证明ei j k el m k = δi l δ j m − δi m δ j lδil δi m δjm δk m δi k δjk δkkei j k el mk = δ jl δk l= δk l = δi mδi m δjm δil δ jlδi k δjk −− δk m δilδil δ jl +3δi k δ jk δil δ jl+3δil δ jl =δim δ jm δil δ jl δim δ jm13δim δ jmδim δ jmδjmδ jl由ei j k el m k = δi l δ j m − δi m δ j lei j k el j k = 2δil3)4)ei j k ei j k =6144. 纳布拉算子∂ ei = ( ▽= ∂xi),i ei = ∂ ,i ()ei15§1.3 张量的代数运算⎧ ⎧ ⎧ ⎧ ⎧数乘加法点积缩并叉积⎧ ⎧ ⎧ ⎧ ⎧点叉积张量积转置求逆对称与反对称161. 张量的记法绝对记法(一个字母):T、A 分量记法:矩阵表示:T = Tijkl ......eie je k ...⎧T11 T12 T13 ⎧ ⎧ ⎧ T = ⎧T21 T22 T23 ⎧ ⎧ ⎧T31 T32 T33 ⎧ ⎧172. 张量的特征定义在坐标变换时,满足如下变换关系的量为张量T = α T ⎧ ' ' ' ' ' α ' α ' ijkl ii j j k k ⎧ i jkl ⎧ Tijkl = α ii ' α jj ' α kk ' α ll ' Ti ' j 'k 'l ' ⎧ ⎧例:由第一节应力张量e i′ = Li′je jT = Ti' j ' ei' e j ' = Ti' j ' Li' j e j L j 'k e k = T jk e j e kT jk = Li' j L j 'k Ti' j '因此, T 为二阶张量。
二阶张量作旋度

二阶张量作旋度旋度是矢量场的一个运算符,用来描述矢量场在点周围的旋转性质。
在二维空间中,旋度是一个标量,也可以看作一个二阶张量。
本文将介绍旋度的定义、性质、计算方法以及它在物理学中的应用。
一、定义与性质:在二维欧几里得空间中,给定一个矢量场V(x, y),其中(x, y)表示点的坐标,则旋度的定义如下:旋度rot(V) = (∂V_y/∂x - ∂V_x/∂y)其中,∂/∂x和∂/∂y分别表示对变量x和y的偏导数,V_x和V_y分别表示矢量场V在x和y方向上的分量。
旋度的性质如下:1.旋度是一个二阶张量,即它具有一些特定的变换规律。
当坐标系统由(x, y)变换为(x', y')时,旋度的变换规律为:rot(V') = (∂V_y'/∂x' - ∂V_x'/∂y') = (∂V_y/∂x - ∂V_x/∂y) = rot(V)2.旋度的绝对值表示了矢量场在点周围的旋转程度。
若旋度的绝对值趋近于0,则表示该点周围的矢量场不存在明显的旋转;若旋度的绝对值趋近于正无穷大,则表示该点周围的矢量场存在较强的旋转。
旋度的符号表示了旋转的方向,顺时针旋转为正,逆时针旋转为负。
二、计算方法:旋度的计算方法主要是通过求偏导数来实现的。
对于矢量场V(x, y) = V_x(x, y)i + V_y(x, y)j,其中i和j分别是x和y方向上的单位矢量,我们可以通过以下步骤计算旋度:1.分别对V取偏导数:∂V/∂x = ∂(V_xi + V_yj)/∂x = (∂V_x/∂x)i + (∂V_y/∂x)j∂V/∂y = ∂(V_xi + V_yj)/∂y = (∂V_x/∂y)i + (∂V_y/∂y)j2.计算旋度:rot(V) = (∂V_y/∂x - ∂V_x/∂y) = (∂V/∂x - ∂V/∂y) =(∂(∂V_x/∂x)/∂y - (∂∂V_y/∂x)/∂x)i + (∂(∂V_x/∂x)/∂x -(∂∂V_y/∂x)/∂y)j三、应用:旋度在物理学中有广泛的应用。
张量运算(PDF)
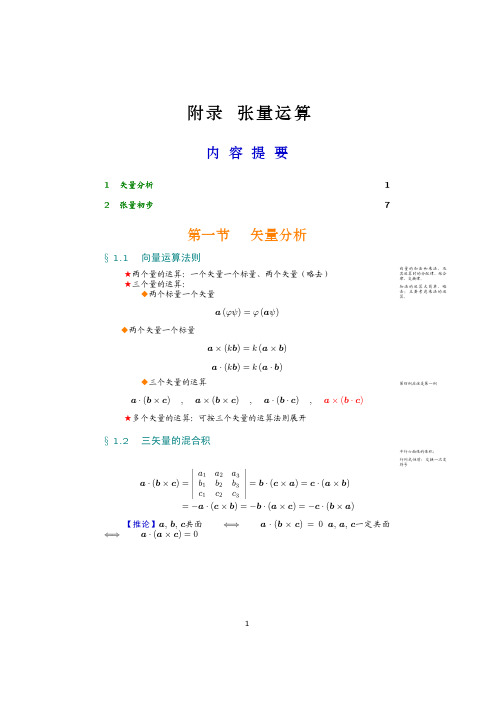
★多个矢量的运算:可按三个矢量的运算法则展开
向量的加法和乘法,及 其运算时的分配律、结合 律、交换律。 加法的运算太简单,略 去;主要考虑乘法的运 算。
第四例应该是第一例
§ 1.2 三矢量的混合积
【解】
∇ (f · g) = ∇ (f · gc) + ∇ (fc · g) → (gc · ∇) f + (f × ∇) × gc + (∇ · fc) g + (g × ∇) × fc = (gc · ∇) f + gc × (∇ × f ) + (fc · ∇) g + fc × (∇ × g) = (g · ∇) f + (f · ∇) g + g × (∇ × f ) + f × × g) = ∇ · (fc × g) + ∇ · (f × gc) → −fc · (∇ × g) − gc · (f × ∇) = −fc · (∇ × g) + gc · (∇ × f ) = −f · (∇ × g) + g · (∇ × f )
例二
【形式变换】
(f · ∇) g
(k · ∇) r = ∇ (k · r) − k × (∇ × r) = ∇ (k · r) = k (f · ∇) (ϕg) = g [(f · ∇) ϕ] + ϕ [(f · ∇) g]
事实上由并矢可知:
(f · ∇) g = ∇ · (f g) − (∇ · f ) g
例三
【形式变换】
(f × ∇) × g
a1 a2 a3 a · (b × c) = b1 b2 b3 = b · (c × a) = c · (a × b)
张量1-1
u1
u2 v2
u3 v3 ijk uiv j wk w3
U (V W ) v1
w1 w2
用置换符号展开三阶行列式,令:
1 a1 a a12
a1 2 2 a2
3 a2
1 a3 2 1 2 3 3 1 2 1 3 2 2 1 3 3 2 1 a3 a1 a2 a3 a12 a2 a3 a13a1 a a a a a a a a 2 3 1 2 3 1 2 3 1 a2 a3 3 a3
Txx Txy Txz bx 0 x y z Tyx x Tyy y Tyz z by 0
Tzx Tzy Tzz bz 0 x y z
写出其指标记法
Tij j
bi 0
Tji, j bi 0
ij 2G ij kkij
缩并
ii 2G ii kk ii 2G ii 3 kk (2G 3 ) kk 哑标与求和无
关,可用任意 字母代替
为平均应力应变之间的关系 G、λ称 (Lame,G) 常数
1.4 指标记法的运算
1.4.5 例题 ——熟悉指标记法和普通记法的转换
1
123 1
3
2
132 1
叉积U×V可表成:
e1 v1 e2 v2 e3 v3 U V u1 u2 u3 ijk u j vk
如i=1时:
1 jk u j vk 123u2v3 132u3v2 u2 v3 u3v2
U (V W ) 可表成:
1 1 11 [ 11 ( 22 33 )] 11 E E E 1 1 12 xy 12 2G 2G 11 22 33
5直角坐标系中的张量
(注意等号两边的脚标)
3
∑ 2.矢量的坐标变换
A' i
=
aij Aj ,i = 1, 2,3 ,缩写为:
i =1
A' i
=
aij Aj
3.坐标变换系数矩阵满足
a a im jm
=
⎧1,i = ⎨⎩0,i ≠
j j
a a mi mj
= δij
=
⎧1,i = ⎨⎩0,i ≠
j j
பைடு நூலகம்
4.其它
等等。
Aii = A11 + A22 + A33 Ai Bi = A1B1 + A2B2 + A3B3 Ai BkCi = Bk ( A1C1 + A2C 2 + A3C3 ), k = 1, 2,3
⎛ 0 −1 3⎞
例7
设
⎡⎣Tij
⎤⎦
=
⎜ ⎜⎜⎝
1 −3
0 −2
2 0
⎟ ⎟⎟⎠
,求它在新系下的分量,其中
⎛ 0 0 1⎞
⎡⎣aij
⎤⎦
=
⎜ ⎜⎜⎝
−1 0
0 1
00 ⎟⎟⎟⎠
解
T1′1 = a1pa1qTpq = T23 = 0 T1′2 = a1pa2 Tq pq = a13a21T31 = 3
Tij′ = a a T ip jq pq
其中,Tpq 与Tij′ 分别为这个量在旧,新系中的分量,aij 为旧系到新系的变换系数
矩阵。则称这个量T = (Tpq ) 为一个 R3 中的二阶张量。
例5
单位矩阵δ 是一二阶张量 ij
证
要证:δ ′ ij
δ = a aip jq pq
张量的变换规律及其在物理学中的应用研究
张量的变换规律及其在物理学中的应用研究引言:张量是数学中的一个重要概念,它在物理学中具有广泛的应用。
张量的变换规律是研究张量在不同坐标系下的表示方式,通过变换规律可以更好地理解和描述物理现象。
本文将探讨张量的变换规律及其在物理学中的应用研究。
一、张量的基本概念张量是一个多维数组,它在不同坐标系下具有不同的表示方式。
在物理学中,张量可以用来描述物体的形变、力学性质等。
张量的阶数表示张量的维度,例如一阶张量是一个向量,二阶张量是一个矩阵。
二、张量的变换规律张量的变换规律是研究张量在不同坐标系下的表示方式。
在坐标系变换中,张量的分量会发生变化,但张量本身的性质保持不变。
对于一阶张量,其变换规律可以通过坐标变换矩阵来表示;对于二阶张量,其变换规律可以通过坐标变换矩阵的乘积来表示。
三、张量的物理应用1. 张量在力学中的应用:张量在力学中有广泛的应用,例如刚体力学中的转动惯量张量、应力张量和应变张量等。
通过张量的变换规律,可以在不同坐标系下描述物体的力学性质,从而更好地理解和解决力学问题。
2. 张量在电磁学中的应用:张量在电磁学中也有重要的应用,例如电磁场张量和电磁波张量等。
通过张量的变换规律,可以在不同坐标系下描述电磁场的分布和传播,从而研究电磁现象和解决电磁问题。
3. 张量在相对论中的应用:相对论是现代物理学的重要理论之一,张量在相对论中有着重要的应用。
例如,时空的度规张量可以用来描述物体在时空中的运动和相互作用。
通过张量的变换规律,可以在不同惯性系下描述物体的运动和相互作用,从而更好地理解和解释相对论的基本概念和现象。
四、张量的研究进展张量的研究在数学和物理学中都有着重要的地位。
在数学领域,人们一直在探索张量的性质和应用,发展了许多重要的理论和方法。
在物理学领域,人们通过张量的变换规律,研究了许多重要的物理问题,并取得了丰富的成果。
结论:张量是数学中的一个重要概念,在物理学中具有广泛的应用。
通过研究张量的变换规律,可以更好地理解和描述物理现象。
张量分析-第2讲
张量分析 ( Tensor analysis)
华中科技大学力学系 罗俊
版权所有 2011 华中科技大学力学系
1
1.5 坐标变换
已知某物理量或数学物理方程在一个坐标系的表达式, 求它在其它坐标系的相应形式。 旧坐标系 新坐标系
10
3. n阶张量 设物理量T共有3 个分量,且满足坐标变换关系:
n
T
' ' i1 i n
T
' ' i1 in
' i1 j1
' i2 j2
' in j2
j1 j n
则称T为n阶张量。 T
称为n阶张量T的逆变分量。
总共多少种分量? 每种多少个分量? 坐标变换关系如何写? 指标升降关系如何写?
T ab 是二阶张量,将a, b在基矢上分解 :
T ab a i g i b j g j ai g i b j g j a i b j g i g j ai b j g i g j
相应地:
T T g i g Ti g g j T g i g j Tij g g
5
坐标变换系数求法
协变变换 旧---新
j x i 'j i ' x
j' x i j ' i x
逆变变换
i' x ij ' j x
i x ij ' j ' x
互逆
新---旧
4. 矢量分量的坐标变换关系 根据基矢的坐标变换关系可以得到矢量分量的坐标变 换关系:
不同坐标系下惯量张量转换 -回复
不同坐标系下惯量张量转换-回复标题:不同坐标系下惯量张量转换在物理学中,惯量张量是一个重要的物理量,它描述了物体在各种力的作用下的运动状态。
然而,在不同的坐标系下,惯量张量的表达形式可能会有所不同。
因此,我们需要掌握如何在不同的坐标系之间进行惯量张量的转换。
本文将详细阐述这个过程。
首先,我们来了解一下什么是惯量张量。
惯量张量是广义相对论中的一个重要概念,它是描述物质分布对时空弯曲程度的一种度量。
在经典力学中,惯量张量可以看作是动量与角动量的推广。
它的分量表示物体在各个方向上的转动惯量和质点间相互作用的强度。
在不同的坐标系下,惯量张量的表达形式会有所不同。
这是因为惯量张量是一个二阶张量,其分量值依赖于所选的坐标系。
例如,在笛卡尔坐标系下,惯量张量的分量可以用三个独立的实数来表示;而在球坐标系下,惯量张量的分量则需要用四个独立的复数来表示。
那么,如何在不同的坐标系之间进行惯量张量的转换呢?这就需要引入一个重要的数学工具——坐标变换公式。
根据坐标变换公式,我们可以将一个坐标系下的物理量转换到另一个坐标系下。
具体来说,假设我们有一个惯量张量I在坐标系O1中的表达式为I1,现在我们想将其转换到坐标系O2中,得到新的惯量张量I2。
这时,我们就可以使用坐标变换公式来进行转换。
首先,我们需要找到从坐标系O1到坐标系O2的坐标变换矩阵T。
这个矩阵包含了两个坐标系之间的坐标关系。
然后,我们将惯量张量I1乘以这个矩阵的逆矩阵T^-1,就可以得到在坐标系O2下的新的惯量张量I2。
以上就是惯量张量在不同坐标系下转换的基本步骤。
需要注意的是,虽然这个过程看起来很简单,但是在实际操作时,由于涉及到复杂的数学计算,所以可能需要借助计算机软件或者计算器等工具来完成。
总的来说,惯量张量的转换是一个非常重要的问题,它对于理解和研究物体的运动状态具有重要的意义。
通过学习和掌握惯量张量的转换方法,我们可以更好地理解和应用这一重要的物理量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二阶张量坐标变换公式
二阶张量是物理学中经常使用的一种量,描述了空间中一个向量与另一个向量的乘积,既具有方向又具有大小。
而坐标变换是数学中重要的一种概念,它将一个向量在一个坐标系中表示成在另一个坐标系中的表示方式。
本文将介绍二阶张量坐标变换的公式及其应用。
在介绍二阶张量坐标变换公式之前,我们先来回顾一下一阶张量的坐标变换。
对于一个一阶张量,其在不同坐标系下的表示方式可以通过矩阵变换得到。
具体而言,若$T$表示一个一阶张量,$A$表示原坐标系的基底,$B$表示新坐标系的基底,那么在$A$坐标系下的表示方式为:
$$T_A=T\cdot A$$
在$B$坐标系下的表示方式为:
$$T_B=T\cdot B$$
其中,$\cdot$表示矩阵乘法。
根据坐标变换的基本原理,可以得到:
$$T_B=S^{-1}\cdot T_A\cdot S$$
其中,$S$是坐标变换矩阵,其满足$B=AS$。
根据这个公式,我们能够在不同坐标系下准确地描述一阶张量。
对于二阶张量,同样可以得出类似的坐标变换公式。
对于一个二阶张量$T$,其在$A$坐标系下的表示方式为:
$$T_{ij}^A=T(e_i)_A\cdot T(e_j)_A$$
其中,$e_i$和$e_j$是$A$坐标系的基向量。
同样的,我们可以得到它在$B$坐标系下的表示方式为:
$$T_{ij}^B=T(e_i)_B\cdot T(e_j)_B$$
其中,$e_i$和$e_j$是$B$坐标系的基向量。
将它们带入坐标变换公式,可以得到:
$$T_{ij}^B=S_{ik}\cdot S_{jl}\cdot T_{kl}^A$$
其中,$S$是坐标变换矩阵,其满足$B=AS$。
这个公式就是二阶张量坐标变换的公式。
显然,它在形式上与一阶张量坐标变换公式是相似的。
二阶张量坐标变换公式的应用十分广泛。
例如,在弹性力学中,应力张量和应变张量都是二阶张量。
当物体受到外力作用时,其内部就会产生应力和应变,而应力张量和应变张量则可以用来描述物体在不同坐标系下的表现。
又如在材料科学中,晶格张量也是一种二阶张量,可以用来描述不同晶格方向下的晶体物理性质,并且可以通过坐标变换公式在不同晶格系统下互相转化。
综上所述,二阶张量坐标变换公式是物理学和工程学中重要的概念之一,具有广泛的应用价值。
深入理解这个公式,对于研究材料、力学等领域的问题有着重要的指导作用。