陀螺定向原理
陀螺原理的主要应用

陀螺原理的主要应用1. 玩具陀螺•玩具陀螺是陀螺原理最常见的应用之一。
•陀螺原理使得陀螺能够保持平衡并旋转。
•玩具陀螺采用了陀螺原理,给人带来了乐趣和挑战。
•通过旋转陀螺,可以观察到陀螺在空间中的平衡状态,增加对物理学原理的理解。
2. 惯性导航系统•惯性导航系统是陀螺原理在航空航天领域的重要应用。
•陀螺作为惯性导航系统的核心组件,通过测量自身的角速度和加速度来确定航空器或导弹的运动状态。
•陀螺的稳定性和精确性使得惯性导航系统成为航空航天领域中不可或缺的导航工具。
3. 陀螺仪•陀螺仪是一种利用陀螺原理测量和感知角速度的设备。
•陀螺仪广泛应用于飞行器、导弹、船舶、汽车等领域。
•陀螺仪通过测量和感知角速度的变化,实时监测运动物体的姿态和方向。
•陀螺仪的高精度和稳定性使其在航空航天、惯性导航及其他领域中具有重要的应用价值。
4. 陀螺稳定器•陀螺稳定器是一种利用陀螺原理实现姿态稳定的设备。
•陀螺稳定器广泛应用于飞行器、船舶、汽车等领域。
•陀螺稳定器通过陀螺的自稳定性来实现运动物体的姿态稳定,提高运动物体的稳定性和安全性。
•陀螺稳定器的应用使得飞行器、船舶等交通工具在运动中更加平稳、安全。
5. 陀螺测井仪•陀螺测井仪是一种利用陀螺原理测量井身方位的设备。
•陀螺测井仪广泛应用于油田勘探和开发中。
•陀螺测井仪通过测量井身方位,判断井下地层的走向和位置,提供重要的地质信息。
•陀螺测井仪的高精度和可靠性使其成为油田勘探和开发中不可或缺的工具。
6. 陀螺陀螺定向系统•陀螺定向系统是一种利用陀螺原理确定方向的设备。
•陀螺定向系统广泛应用于地质勘探、导航和测绘等领域。
•陀螺定向系统通过测量陀螺的角速度和方向,确定导航或测绘目标的方向和位置。
•陀螺定向系统的高精度和稳定性使其成为地质勘探和导航等领域中的重要工具。
陀螺原理是一项重要的物理原理,其应用涵盖了玩具陀螺、惯性导航系统、陀螺仪、陀螺稳定器、陀螺测井仪和陀螺定向系统等多个领域。
陀螺是什么原理

陀螺是什么原理
陀螺是一种原理利用自身的转动稳定平衡的玩具或装置。
它的主要原理是动量守恒和角动量守恒。
陀螺的内部通常有一个或多个重物,称为陀螺轴,位于陀螺的中心。
当陀螺轴受到外力(例如转动手势)作用时,陀螺开始旋转。
陀螺的旋转运动会使得陀螺轴保持向一个方向的转动,这是因为陀螺轴的旋转会使它的角动量保持不变。
而当陀螺轴倾斜时,由于重力的作用,陀螺轴会受到一个力矩,在陀螺轴的偏离方向上产生一个回复力矩。
这个回复力矩会调整陀螺的倾斜角度,使得陀螺重新保持平衡。
通过这一原理,陀螺可以在平面上旋转,并保持平衡状态。
人们可以使用手势、绳索等方式控制陀螺的转动,使得它表现出各种奇妙的动态和稳定性。
陀螺也广泛应用于科学教学、娱乐及各种实际应用中。
进动和陀螺

进动仪(陀螺仪)【实验目的】演示刚体的进动和陀螺的定轴性这一物理现象。
【实验原理】当物体(如陀螺)不转动时,由于受到重力矩的作用,便倾倒下来,但当陀螺急速旋转时,尽管同样也受到重力矩的作用,却不会到下来。
这时陀螺在绕本身对称轴线转动的同时,对称轴还将绕竖直轴回转,这种回转现象称为进动。
进动角速度为式上中,为在时间内,该自转轴相应的角位移。
由此可知,进动角速度与外力矩成正比,和进动仪自转的角动量成反比,因此,在进动仪自转角速度很大时,进动角速度就较小,反之,在自转角速度变小时,进动角速度就增大。
【实验操作与现象】1.刚体的定向转动将进动仪保持水平,转动自转轮,达到一定速度时,操作者旋转或移动演示仪下部转盘时,自转方向保持不变。
2.刚体的进动把进动仪调节成不水平状态,略有倾斜,转动自转轮,则发现公转轴开始作进动。
【注意事项】操作时,注意进动仪在开始和结束进动时,防止自转轮掉下摔坏仪器和伤害操作者。
【实验拓展】试举出陀螺仪在实际工程应用中的一个实例。
陀螺仪可算是非常复杂的物体,因为它们以独特的方式运动,甚至像在抵抗重力。
正是这些特殊属性使其在各个方面(包括自行车和宇宙飞船上的先进导航系统)都有极为重要的用途。
一般的飞机要用约10多个陀螺仪,遍布在罗盘和自动驾驶仪等各个地方。
俄罗斯米尔空间站(Russian Mir space station)曾使用11个陀螺仪保持其方向对准太阳。
哈勃太空望远镜也安装了大量导航陀螺仪。
同样,陀螺效应对溜溜球和飞盘等玩具也至关重要。
在本文中,我们将了解陀螺仪的应用为何如此广泛,以及它们的奇妙运动的成因!如果您玩过陀螺玩具,就知道它能表演各种各样有趣的绝技。
陀螺能在细线或手指上保持平衡;能以非常奇妙的方式抵制自转轴运动;但最有趣的陀螺效应还数进动。
这是陀螺仪抵抗重力的表现。
根据这一原理,回转的自行车轮能够像下图所示的那样悬在空中:陀螺仪“抵抗重力”的能力令人莫名惊诧!它是怎么做到的?这种神秘的效应就是“进动”。
光纤陀螺的应用原理
光纤陀螺的应用原理什么是光纤陀螺光纤陀螺是一种基于光学原理的惯性测量装置,利用光信号在光纤中传输的特性,通过测量光信号在光纤中的相位变化来判断光纤陀螺的转动情况。
光纤陀螺的工作原理1.发光器发出一束定向的光束,并通过偏振器产生一个偏振方向。
2.光束经过一个光分束器,被分成两束光线,分别沿着光纤的正反方向传播。
3.光束沿着光纤传播时,会受到光纤陀螺的转动所引起的Sagnac效应的影响,导致光束的相位差发生变化。
4.光束再次通过光分束器,会按照原来的比例合并成一束光线。
5.光束进入光探测器,光探测器会感知光束的强度变化和相位差变化,通过转化为电信号进行处理。
6.电信号经过放大器放大后,通过处理电路和计算器进行信号分析和计算,可以得到光纤陀螺的转动角速度。
光纤陀螺的应用光纤陀螺由于其高精度、高稳定性和不受外界干扰的特点,在许多领域都有广泛的应用。
惯导系统光纤陀螺可以用于惯导系统,用来测量和记录飞行器的角速度、角度和位置信息,从而实现导航和定位功能。
在航空航天领域,光纤陀螺广泛应用于飞行器的导航、制导和控制系统。
船舶姿态控制光纤陀螺可以用于船舶姿态控制系统,测量船舶的倾斜和航向角度,从而实现船舶的稳定性控制和导航功能。
光纤陀螺在海洋工程和海上作业中也有重要应用,提供精确的定位和导航数据。
医疗诊断光纤陀螺可以用于医疗诊断设备中,测量和监测人体运动、平衡和姿势等生理参数。
例如,在康复治疗中,光纤陀螺可以用来评估和监测患者的运动能力和平衡功能,从而指导康复训练和治疗方案。
地震监测光纤陀螺可以用于地震监测和地壳运动研究,测量和记录地壳的微小变形和震动。
光纤陀螺在地震预警系统和地质勘探中有重要应用,帮助科研人员更好地了解地球的结构和地震活动规律。
总结光纤陀螺基于光学原理,通过测量光信号在光纤中的相位变化来判断光纤陀螺的转动情况。
光纤陀螺具有高精度、高稳定性和不受外界干扰的特点,在惯导系统、船舶姿态控制、医疗诊断和地震监测等领域都有广泛的应用。
陀螺原理

四、影响因素(四要素)
– 转子的转动惯量:J – 自转角速度:Ω
回目录
– 牵连角速度:ω牵 – α角度的大小:自转角速度矢量与牵连角速度矢量的垂
直位置的夹角。
§3、陀螺力矩(续)
– 陀螺力矩的大小公式: L=Hω牵*COSα=JΩω牵*COSα
五、用陀螺力矩来解释陀螺的进动性、章动性
– 用来解释陀螺的章动性与进动性 – 用来解释陀螺的稳定性
– 即:M外沿内框轴,ω进(进动角速度)沿外框轴。 – M外沿外框轴,ω进(进动角速度)沿内框轴。 – (1) 进动方向:
判断准则:将外力矩矢量沿转子自转方向转动90度即为进动角 速度ω进的矢量方向。
陀螺受外力矩作用时,自转角速度矢量沿最短路线向外力矩矢 量运动。(跟赶外力矩矢量)
回目录
§2、陀螺及其基本特性(续)
回目录
§2、陀螺及其基本特性(续)
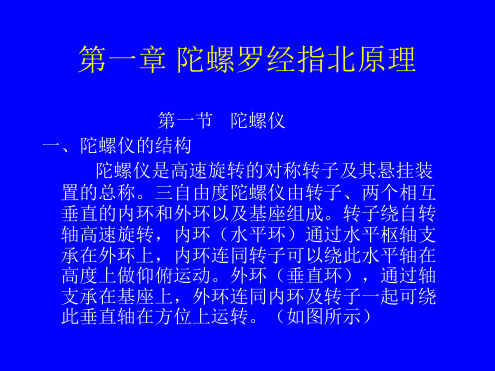
②二自由度陀螺的结构(图1-12):
– 转子、内框
两轴互相垂直:自转轴,内框轴
③各种部件结构的特点:
– a:转子:是一个对称的飞轮,可以在内框中高速旋转,具有一 定的角动量。
材料:比重大(不锈钢,铜等) 由陀螺电动机带动:直流电机6000-10000转/分 异步电机:23000转/分 磁滞电机:24000转/分
– 用于航空:仪表系统,控制系统 – 用于航海:定向系统 – 用于宇航:导航系统 – 用于地质:定位系统 – ①作指示仪表:
地平仪:俯仰角、航向角、倾斜角 转弯仪:飞机转弯方向和转弯速度
回目录
§2、陀螺及其基本特性(续)
②作传感器:输出与被测量的参数成一定关系的 电信号。
– 垂直陀螺(θ、γ)、罗盘系统(航向传感器)、转 弯角速度传感器等。
陀螺罗经指北原理
a rv
=
V cos C
Rewe cos?
1.仅取决于航速(V)、航向(C)、和地理纬度( ? ), 与罗经结构参数无关。任何罗经均会产生速度误差。
2.随船速(V) 、纬度( ? )的增大而增大。
3.航向偏北,αrv>0, 西误差; 航向偏南, αrv<0, 东误差。
4 . 东西航向无误差,南北航向误差最大。
第二章 陀螺罗经误差及其消除
第二节 速 度 误 差(speed error)
五、速度误差的消除
V3
u2 r
V2
V1
(W )
V3
u2 r
V2
V1`
1.查表法: 2.外补偿法:移动刻度盘。 3.内补偿法:施加补偿力矩。
?可施加垂直轴补 偿力矩,产生V1` (E) 以抵消V3。
第二节 冲 击 误 差(Ballistic error)
? 将右手大拇指与四指垂直,四指顺着转 动的方向朝内弯曲,则大拇指所指的方 向即是角速度向量的方向'
Z
F
H X
My Y
? 进动角速度( w)、动量矩和外力矩三者之间是互相
垂直的,进动角速度的方向 (和大小取决于动量矩和外
力矩的方向和大小。
? Wpz = My/H
-Wpy = Mz/H
? Wpy和Wpz是陀螺仪相对于宇宙空间的绝对角速度在 OY
第二章 陀螺罗经误差及其消除
第二节 速 度 误 差(speed error)
二、船舶作恒速恒向运动时的旋转角速度及其在 地理坐标系各坐标轴上的分量;
N VN
C O
V VE E
?设船偏北航行,航速 V, 航向 C 。
VN=VCosC
《陀螺》ppt课件优秀版
CHAPTER
陀螺仪在陆地交通领域应用
陀螺仪能够精确测量汽车的横滚、俯仰和偏航角度,为自动驾驶系统提供准确的车辆姿态信息。
姿态测量
结合GPS和其他传感器数据,陀螺仪能够提高汽车的定位精度,确保自动驾驶汽车在复杂道路环境中的稳定行驶。
导航定位
通过实时监测车辆动态参数,陀螺仪有助于自动驾驶系统实现车辆稳定性控制,提高行驶安全性。
陀螺仪在水下潜航器中发挥关键作用,通过实时测量潜航器的姿态和角速度,为深海导航提供精确的数据支持。
深海导航
结合陀螺仪的测量数据和其他传感器信息,水下潜航器可以实现地形匹配和精确定位,提高水下作业的准确性和效率。
地形匹配与定位
陀螺仪作为惯性导航系统的重要组成部分,可以为水下潜航器提供持续、稳定的导航支持,确保潜航器在复杂水下环境中的可靠运行。
控制稳定性
车辆定位与导航
通过对乘客上下车数据的采集和分析,陀螺仪有助于实现客流量的精确统计和预测,为运营调度提供数据支持。
客流统计与分析
安全监控与预警
陀螺仪能够实时监测城市轨道交通系统的运行状态,发现潜在的安全隐患并及时预警,确保乘客出行安全。
在城市轨道交通系统中,陀螺仪能够提供准确的车辆定位和导航信息,确保列车在复杂环境中的稳定运行。
随着MEMS技术的发展,陀螺仪将越来越微型化和集成化,降低成本并拓展应用领域。
微型化和集成化
提高陀螺仪的测量精度和稳定性是未来发展的重要方向,以满足高端应用的需求。
高精度与高性能
将陀螺仪与其他传感器(如加速度计、磁力计等)进行融合,通过算法优化提高数据处理的准确性和效率。
多传感器融合与算法优化
陀螺仪在发展过程中面临着技术、市场和应用等多方面的挑战,但同时也为相关产业带来了巨大的发展机遇。
陀螺仪漂移及测试课件
陀螺仪测试中的注意事项
在进行陀螺仪测试时,应确保测试环 境干净整洁,避免灰尘、污垢等杂质 对测试结果造成影响。
在进行动态测试时,应遵循安全操作 规程,确保测试过程中的安全。
测试前应对陀螺仪进行充分的预热, 以确保其性能稳定。
对于高精度的陀螺仪,应采用高精度 的测试设备进行测试,以确保测试结 果的准确性。
陀螺仪的种类和用途
机械陀螺仪
微机械陀螺仪
利用旋转轴的定轴性,用于方向测量 和控制系统,如导弹、飞机、船舶等 导航系统。
利用微机械加工技术制造,具有低成 本、小型化、集成化等特点,用于消 费电子产品、智能穿戴设备等。
光学陀螺仪
利用光束的干涉效应,具有高精度、 抗电磁干扰等特点,用于高精度测量 和控制系统,如卫星定位系统、惯性 导航系统等。
CHAPTER
陀螺仪静态测试
01
02
陀螺仪静态测试是指将 陀螺仪置于静止状态下 进行测试,以评估其性能。
测试内容包括检查陀螺 仪的零点稳定性、分辨 率、噪声水平等。
03
静态测试通常在实验室 环境下进行,以确保测 试结果的准确性。
04
静态测试还可以用于评 估陀螺仪在不同温度和 湿度条件下的性能表现。
陀螺仪动态测试
01
02
03
04
陀螺仪动态测试是指在实际运 动状态下对陀螺仪进行测试, 以评估其在动态环境中的性能。
测试内容包括检查陀螺仪的动 态响应速度、抗干扰能力、稳
定性等。
动态测试通常在振动台、离心 机等设备上进行,以模拟实际
使用中的各种运动状态。
动态测试还可以用于评估陀螺 仪在不同运动状态下的性能表 现,如旋转、俯仰、滚动等。
CHAPTER
陀螺工作原理
陀螺工作原理
陀螺是一种基于角动量守恒原理工作的旋转装置。
它由一个旋转轴和围绕轴旋转的转子组成,通常由一个电动机驱动。
陀螺的工作原理可以用“陀螺定理”来解释。
根据这个定理,当一个陀螺旋转时,它会在垂直于旋转轴的方向上产生一个角动量。
这个角动量会产生一个力矩,使陀螺产生一个力的反作用力,使其保持平衡。
具体来说,当陀螺旋转时,它的转子会围绕旋转轴自由旋转。
由于转子的旋转,它会产生一个角动量,这个角动量使得陀螺的旋转轴倾斜。
这时,陀螺会受到一个力矩的作用,力矩将陀螺的旋转轴推向一个特定的方向,使其保持平衡。
陀螺的平衡是基于角动量守恒原理的,即陀螺的角动量在没有外力作用下保持不变。
只要陀螺的角动量保持不变,它就能保持平衡状态。
陀螺可以应用于多个领域,如惯性导航系统、陀螺仪等。
在惯性导航系统中,利用陀螺的角动量守恒特性,可以测量位置变化、速度和方向的变化。
陀螺仪则是利用陀螺的运动原理来检测和测量角速度。
总的来说,陀螺的工作原理是基于角动量守恒的,通过旋转产生的角动量来保持平衡状态。
这使得陀螺在多个领域中发挥了重要作用。
陀螺仪的原理
陀螺仪的原理
陀螺仪的原理是基于角动量守恒定律。
角动量是描述物体转动状态的物理量,守恒定律指的是在没有外力作用下,角动量总是保持不变的。
陀螺仪通常由旋转的转子和支撑结构组成。
转子通过电机驱动高速旋转,在转子中心产生一个很大的角动量。
支撑结构将转子固定在一个特定的方向上,使其成为一个转动的轴。
当陀螺仪发生转动时,由于角动量守恒定律的作用,任何试图改变其方向的外力都会受到抵抗。
这意味着转子会保持在一个固定的方向上旋转,而不会被其他力干扰。
通过测量陀螺仪转动轴相对于参考方向的角度变化,我们可以获得物体的转动状态。
这种测量方法被广泛应用于惯性导航系统、飞行器姿态控制、自动驾驶车辆和虚拟现实等领域。
值得注意的是,陀螺仪仅可以测量物体的角速度(转动速度),而无法直接测量物体的角度。
为了获取物体的角度信息,通常需要进行积分运算,将角速度转换为角度。
然而,由于误差的累积,陀螺仪在长时间使用中可能会出现漂移现象,因此需要配合其他传感器进行校正和补偿,以提高测量的精度和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺定向原理
陀螺定向原理是指利用陀螺仪的旋转稳定性进行导航定向的原理。
陀螺仪是一种可以感知和测量角速度的装置,通常由一个旋转的转子和测量器构成。
在没有外力作用时,陀螺仪转子会保持一定的旋转速度和方向不变。
利用陀螺定向原理进行导航定向的关键是利用陀螺仪的旋转稳定性。
在导航过程中,陀螺仪的转子会受到地球自转的影响,使得转子的旋转方向和地球自转的方向保持一致。
通过测量陀螺仪转子的旋转速度和方向,可以得到导航定向所需的信息。
具体而言,陀螺定向原理可以通过以下步骤实现:
1. 初始化:将陀螺仪放置在一个水平的位置上,使得转子的旋转轴与地球自转轴垂直。
2. 校准:根据陀螺仪的测量器的输出,对陀螺仪进行校准,使得输出准确反映陀螺仪的旋转速度和方向。
3. 测量:通过测量陀螺仪转子的旋转速度和方向,得到导航定向所需的信息。
4. 计算:利用测量的陀螺仪数据进行计算,推算出导航的位置和方向。
陀螺定向原理利用了陀螺仪转子的旋转稳定性,使得导航定向可以在没有外界参考的情况下进行。
这种原理被广泛应用于航
空、航海、导弹制导等领域,为导航定向提供了一种可靠的方法。