Chapter 4 Solution for planar problems in the polar coordinates 3
结构力学第二章几何组成分析.李廉锟

geometrically stable system
结构
Under the action of any loads, the system still maintain its shape and remains its location if the deformations of the members are neglected.
F
E
2 rigid bodies, connected by 3 links, which are nonparallel and nonconcurrent cross the hinge, form an internally stable system with no redundant restraints. 。
Degrees of freedom of a system are the numbers of independent movements or coordinates which are required to locate the system fully.
for a point in plane n=2
C
structure formed by Attaching of binary systems 减二元体简化分析
W=3 ×10-(2×14+3)=-1<0 W=2 ×6-13=-1<0
计算自由度 = 体系真实 的自由度 ?
W=2 ×6-12=0 W=3 ×9-(2×12+3)=0
缺少联系 几何可变
W=2 ×6-11=1 W=3 ×8-(2×10+3)=1
summary
W>0, 缺少足够联系,体系几何可变 Restraints are not enough, unstable。 W=0, 具备成为几何不变体系所要求的最少 联系数目has the minimum necessary numbers of restraints for stable system。
Chapter 5-1
21
Example – spring mass systems
22
2 DOF spring mass systems
Free body force diagram
m1a1
k2(x2 -x1) k1 x1 m1 x1
m2a2
m2
x2
23
2 DOF spring mass systems
NUS CS5247
32
Solution
For a non trivial solution, the inverse cannot exist
9
Mechanical Components
Inertia force (or kinetic force)
10
One degree of freedom systems
A spring mass system
11
One degree of freedom system
A spring mass damper system
26
Initial conditions
The initial conditions for the previous examples are
27
Matrix form
The two equations can be written in the form of a single matrix equation
ma F
=
0
If the kinetic force is moved to the left hand side, it is known as the inertia force. The inertia force and the external force are in static equilibrium.
高等流体力学3旋涡-1
涡无所不在,形形色色的旋涡按尺度可以排成“涡谱系” 17
关于涡的几个基本问题
1)涡量是一个物理量,它的物理意义是什麽? 2)涡量是如何产生的? 3)什麽是旋涡? 4)如何在流场中识别旋涡?判据是什麽? 这些基本问题是如此重要,但常常难以给出令人满意的回答
20102010 -4-29
18
参考书 Fluid Fl id Vortices, V i edited di d by b S. S I I. G Green, Kl Kluwer A Academic d i P Publishers, bli h 1995, 878 pages H. J. Lugt, Vortex Flow in Nature and Technology. New York, John Wiley & Sons, Sons 1983 童秉纲, 尹协远,朱克勤 童秉纲 尹协远 朱克勤,涡运动理论(第2版).中国科学技术大 学出版社,合肥 2009
台风眼
直径:约几百公里
20102010 -4-29 9
大洋环流
直径:约几十公里
20102010 -4-29
10
岛屿形成的卡门涡街
20102010 -4-29
直径:约几公里
11
龙卷风
直径:约几百米
20102010 -4-29 12
飞机尾涡
直径:约几十米
20102010 -4-29 13
实验室中的旋涡
Küchemann D
流体运动的肌腱
Küchemann D, Report on the I.U.T.A.M. symposium on concentrated vortex motions in fluids, Journal of Fluid Mechanics (1965), 21(1):1-20
地理信息科学专业英语

专业术语英译汉affine 仿射band 波段cartography 制图学clip 剪切digitizer 数字化仪DLG 数字线划图dpi 每英寸点数edgematching 边缘匹配equator 赤道equiarea 等积geoid 大地水准面geospatial 地理空间GPS 全球定位系统Habitat 栖息地Interface 接口Item 项目Latitude 纬度legend 图例longitude 经度median 中值meridian 子午线metadata 元数据neatline 图廓线Object-Based 基于对象的parcel 宗地photogrammetry 摄影测量precipitation 降水量range 范围raster 栅格resample 重采样resolution 分辨率RMS 均方根scanner 扫描仪siting 选址TIGER 拓扑统一地理编码topology 拓扑tuple 数组UTM 通用横轴墨卡托投影vector 矢量专业术语汉译英保护区protected area比例尺Scale bar标准差Standard deviation标准图幅Standard picture frame单精度Single precision地理空间数据Geospatial data点缓冲区Point buffer动态分段Dynamic segmentation度量标准Metrics多项式变换Polynomial transformation高程基准Elevation base跟踪算法Tracking algorithm规则格网Rules grid过渡带Transition zone基于位置服务Based on location service 畸形线Malformation line几何变换Geometric transformation检验图Inspection chart解析几何Analytic geometry空间要素Space element平面坐标系统Planar coordinate system曲流河Meandering river人口普查地段Census Lot上四分位数The upper quartile矢量数据模型Vector data model数据可视化data visualization数据探查Data exploration双精度Double precision水文要素Hydrological elements泰森多边型Tyson Polygons统一建模语言Unified Modeling Language投影坐标系统Projection coordinate system 线缓冲区Line buffer遥感数据Remote sensing data用材林Timber forest晕渲法Halo rendering method指北针Compass属性表Property sheet最短路径分析Shortest path analysis最小二乘法Least squares method翻译例子如下。
金属有机第四章基元反应1

A ligand substitution can occur either by an associativeor dissociative route.In a dissociative substitution, one of the existing ligandson the metal center has to fall off (ligand dissociation),LnM+ :L'' --------> LnM-L"fastthis opens up a free coordination site to which the newligand can coordinate.S‡is significantly positive, the mechanism is almost certainlydissociative.If the rate does not depend on [L], the mechanism is almost certainlydissociative.axial site.The 14e-three coordinate intermediate is actually almost immediately coordinated by a solvent molecule to produce theConsider the following two substitution reactions.the most stable productSince we are starting with an 18e-complex, we have to proceed by adissociative substitution reaction. The phosphite ligand is the more weaklycoordinated and somewhat bulky due to the t-butyl groups. Thus it is the mostlikely ligand to fall off first.The P(OMe)3ligand has about the same σ-donorability as pyridine, but is a considerably better acceptor ligand, thus completing with the trans* Rate depends on both LnM-L' and L"ΔS‡is significantly negative, the mechanism is almost certainlyAssociative SubstitutionsThese occur first by a ligand addition to the metal complexfollowed by the dissociation of one of the original ligands.typically need to have an unsaturated(17e-or lower) complex in order topropose an associative substitution mechanism.there are very few verified examples of this in theliterature.Since we are starting with an 16e-Ni complex without any stericproblems we can to proceed by an associative substitutionreaction. Once the CO ligand coordinates, the weakest ligandthat should fall off is the THF. Late transition metals have a farPentadienylThe pentadienyl ligand is an acyclic version of Cp that does not have any aromatic stabilization. This has two important effects:Consider the following two reactions:Reaction a) is much faster than reaction b). Discuss why this is so.NitrosylThis can occasionally lead to interesting behavior where the linearIn general the stereochemistry of a square-planarcomplex is retained through the substitution reaction.。
机器人学运动学分析_Kinematics
Dynamic Analysis of Mechanical Systems
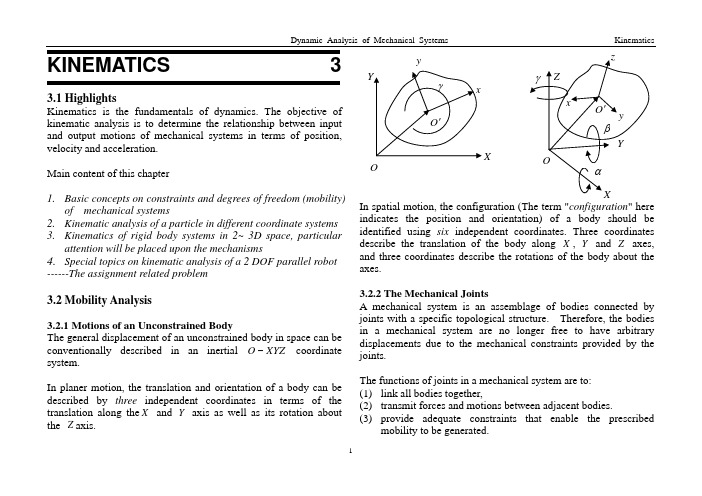
Kinematics
Joints can be classified by the degrees of freedom allowed or restricted. The commonly used joints are listed in Table 1. 3.2.3 Mobility Analysis One of the basic steps in the kinematic analysis of mechanical systems is to determine the number of degrees of freedom or independent coordinates required to determine the configuration of the system. It can be shown that the number of constraints provided by a joint is equal to the number of degrees of freedom eliminated from the unconstraint system as a result of using this joint. In the planar system, the configuration of a rigid body undergoing unconstrained motion can be described by three independent coordinates due to the common constraints. Therefore, a planar system with n unconstrained movable bodies has 3 n DOF. If the system has p joints, each of which provides two constraints (note the common constraints), then the number of degrees of the system can be evaluated by the mobility (Glubler) criterion
Flexible Camera Calibration By Viewing a Plane From Unknown Orientations
Therefore, if images are taken by the same camera with fixed internal parameters, correspondences between three images are sufficient to recover both the internal and external parameters which allow us to reconstruct 3-D structure up to a similarity [14, 12]. While this approach is very flexible, it is not yet mature [1]. Because there are many parameters to estimate, we cannot always obtain reliable results. Other techniques exist: vanishing points for orthogonal directions [3, 13], and calibration from pure rotation [10, 18]. Our current research is focused on a desktop vision system (DVS) since the potential for using DVSs is large. Cameras are becoming cheap and ubiquitous. A DVS aims at the general public, who are not experts in computer vision. A typical computer user will perform vision tasks only from time to time, so will not be willing to invest money for expensive equipment. Therefore, flexibility, robustness and low cost are important. The camera calibration technique described in this paper was developed with these considerations in mind. The proposed technique only requires the camera to observe a planar pattern shown at a few (at least two) different orientations. The pattern can be printed on a laser printer and attached to a “reasonable” planar surface (e.g., a hard book cover). Either the camera or the planar pattern can be moved by hand. The motion need not be known. The proposed approach lies between the photogrammetric calibration and self-calibration, because we use 2D metric information rather than 3D or purely implicit one. Both computer simulation and real data have been used to test the proposed technique, and very good results have been obtained. Compared with classical techniques, the proposed technique is considerably more flexible. Compared with self-calibration, it gains considerable degree of robustness. We believe the new technique advances 3D computer vision one step from laboratory environments to the real world. Note that Bill Triggs [19] recently developed a selfcalibration technique from at least 5 views of a planar scene. His technique is more flexible than ours, but has difficulty to initialize. Liebowitz and Zisserman [13] described a technique of metric rectification for perspective images of planes using metric information such as a known angle, two equal though unknown angles, and a known length ratio. They also mentioned that calibration of the internal camera parame-
流体机械内流理论与计算-理论篇
三维空间上任一矢量表示成: a a1u1 a2u2 a3u3
2.1 张量的定义
只有法应力
• n维欧氏空间是n维矢量空
间,用来描述矢量,如位 置矢量、速度、加速度、 力等物理量足够了,但在 连续介质力学中有些物理 量无法只用矢量空间来描 述了。
• P点处的应力不仅有大小 有方向,而且和作用面的 法向有关。
眼,确实要有一批人坐得住冷板凳的人。”
2015-03-03 流体机械专业如何解读李克强总理的讲话?
2.1 张量的定义
• 张量是各种物理量在空间上的数学表示,是沟通 物理模型到数学模型的桥梁。
– 物理量:流固热声电磁光 – 空间:欧几里德空间、黎曼空间 – 数学表示:与坐标系的选取直接相关
• 张量分析是研究张量的基本概念、基本运算和基 本应用的方法。
2015-03-03
1.2 流体机械内流的研究方法
1. 流体机械内流理论 即从质量、动量、能量三大守恒定律出发,利用张 量分析、数学物理方程等数学工具,并针对流体机 械动静叶片排相间排列的特点,建立起流体机械内 部绝对流动和相对流动的控制方程组及其相应的简 化模型和定解条件。
• Wu CH. A General Theory of Three-dimensional Flow in Subsonic and Supersonic Turbomachines of Axial-, Radial- and Mixed-flow Types[R]. NACA TN-2604, 1952.
S018-Ansoft HFSS系列经典培训教材-ANSOFT HFSS培训教材系列3(英文)
3-1
Synopsis 3D Modeler Basics
Modeler Environment
s View Selection and Manipulation, Grid and Axis Manipulation
s CTRL-left-mouse-drag: rotate s SHIFT-left-mouse-drag: pan s CTRL-SHIFT-left-mouse-drag: zoom
(drag up for ‘in’, down for ‘out’)
s Zooming also controlled with Toolbar Icons
Active Frame Shaded, Cursor Flashing
s Moving in 3D or along any combination of axes achieved using coordinate checkboxes in Side Window
s Note checkboxes have memory!
s Select new origin location before choosing Move Origin
s Select new intercept before choosing Rotate (X, Y, or Z)
s Two Toolbar Icons also provided
smart software for high-frequency design
s Multiple Local coordinate systems can be saved
数形结合在数学中的应用
数形结合在数学中的应用数形结合是指将数学中的符号、公式、运算与几何中的图形、形状、空间相结合,以增强对于数学概念和原理的理解和应用。
数形结合在数学中的应用非常广泛,以下是一些具体例子。
1. 三角函数中的图像三角函数是数学中非常重要的概念,包括正弦函数、余弦函数、正切函数等。
通过将这些函数与图像相结合,我们可以更好地理解它们的性质和特点。
例如,正弦函数的图像是一个周期性的波形,可以被看作是在单位圆上旋转的一个点的纵坐标。
余弦函数的图像与正弦函数非常相似,只是起始位置不同。
通过观察这些图像,我们可以推导出一些数学公式,例如正弦函数的周期为2π、余弦函数的最大值为1等。
同时,通过研究这些图形的对称性、周期性,我们也能够更深刻地理解三角函数的性质。
2. 空间几何中的向量向量是空间几何中的重要概念,它可以表示任意一个有大小和方向的量。
通过将向量与图形相结合,我们可以更好地理解向量的性质和应用。
例如,在二维平面中,我们可以用箭头表示一个向量,箭头的长度表示向量的长度,箭头的方向表示向量的方向。
在三维空间中,向量变成了一个有长度和方向的线段。
通过观察这些图像,我们可以推导出一些数学公式,例如两个向量的点积、向量的模长等。
3. 几何中的圆与数学中的弧度圆是几何中的重要概念,它有着许多特殊的性质。
通过将圆与数学中的弧度相结合,我们可以更好地理解圆的性质和应用。
弧度是一个角度的度量单位,它可以用弧长除以半径来计算。
通过将弧度与圆相结合,我们可以得到圆的周长公式,而圆的面积公式也可以通过数学推导得到。
4. 数学中的图形变换图形变换是数学中非常重要的概念,它包括平移、旋转、缩放、翻转等。
通过将图形变换与几何中的图形相结合,我们可以更好地理解图形变换的性质和应用。
例如,在平面几何中,我们可以用矩阵来表示一个图形的平移、旋转和缩放。
通过观察这些矩阵的特点,我们可以得到一些图形变换的性质,例如平移变换不改变图形的大小和形状、旋转变换不改变图形的面积等。