第2章传递函数矩阵的MFD
§2-3传递函数(transferfunction):§;2-3传递函数(传递函数)
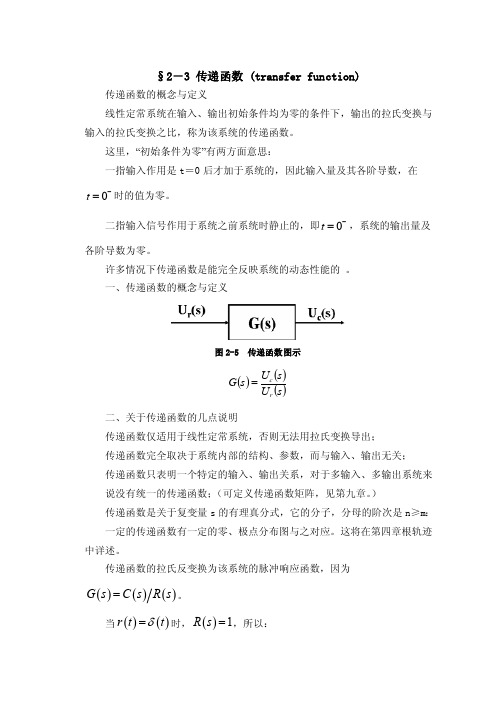
§2-3 传递函数 (transfer function)传递函数的概念与定义线性定常系统在输入、输出初始条件均为零的条件下,输出的拉氏变换与输入的拉氏变换之比,称为该系统的传递函数。
这里,“初始条件为零”有两方面意思:一指输入作用是t =0后才加于系统的,因此输入量及其各阶导数,在0t -=时的值为零。
二指输入信号作用于系统之前系统时静止的,即0t -=,系统的输出量及各阶导数为零。
许多情况下传递函数是能完全反映系统的动态性能的 。
一、传递函数的概念与定义图2-5 传递函数图示()()()s U s U s G r c =二、关于传递函数的几点说明 传递函数仅适用于线性定常系统,否则无法用拉氏变换导出;传递函数完全取决于系统内部的结构、参数,而与输入、输出无关; 传递函数只表明一个特定的输入、输出关系,对于多输入、多输出系统来说没有统一的传递函数;(可定义传递函数矩阵,见第九章。
)传递函数是关于复变量s 的有理真分式,它的分子,分母的阶次是n ≥m : 一定的传递函数有一定的零、极点分布图与之对应。
这将在第四章根轨迹中详述。
传递函数的拉氏反变换为该系统的脉冲响应函数,因为()()()G s C s R s =。
当()()r t t δ=时,()1R s =,所以:()()[]()()[]()[]s G L s R s G L s C L t c 111---===传递函数是在零初始条件下建立的,因此,它只是系统的零状态模型,有一定的局限性,但它有现实意义,而且容易实现。
三、传递函数举例说明例1. 如图所示的RLC 无源网络,图中电感为L (亨利),电阻为R (欧姆),电容为C (法),试求输入电压u i (t)与输出电压u o (t)之间的传递函数。
图2-6 RLC 无源网络解:为了改善系统的性能,常引入图示的无源网络作为校正元件。
无源网络通常有电阻、电容、电感组成,利用电路理论可方便求出其动态方程,对其进行拉氏变换即可求出传递函数。
第八章-传递函数矩阵的矩阵分式描述
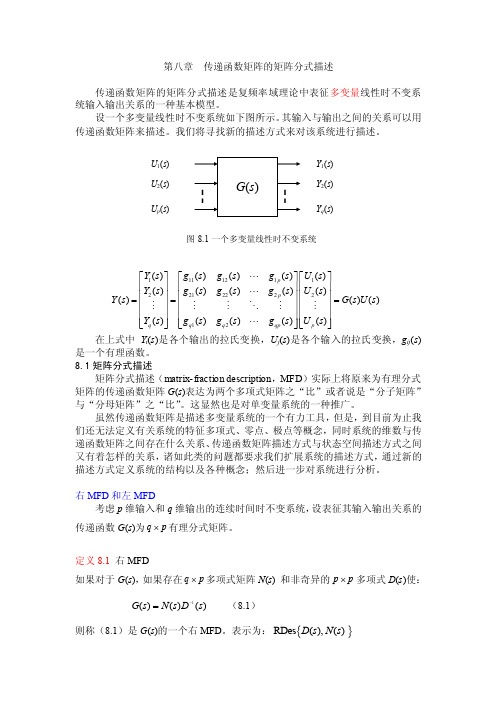
第八章 传递函数矩阵的矩阵分式描述传递函数矩阵的矩阵分式描述是复频率域理论中表征多变量线性时不变系统输入输出关系的一种基本模型。
设一个多变量线性时不变系统如下图所示。
其输入与输出之间的关系可以用传递函数矩阵来描述。
我们将寻找新的描述方式来对该系统进行描述。
1111211221222212()()()()()()()()()()()()()()()()()()p p q q q qp p Y s g s g s g s U s Y s g s g s g s U s Y s G s U s Y s g s g s g s U s ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦在上式中Y i (s )是各个输出的拉氏变换,U j (s )是各个输入的拉氏变换,g ij (s )是一个有理函数。
8.1矩阵分式描述矩阵分式描述(matrix-fraction description ,MFD )实际上将原来为有理分式矩阵的传递函数矩阵G (s )表达为两个多项式矩阵之“比”或者说是“分子矩阵”与“分母矩阵”之“比”。
这显然也是对单变量系统的一种推广。
虽然传递函数矩阵是描述多变量系统的一个有力工具,但是,到目前为止我们还无法定义有关系统的特征多项式、零点、极点等概念,同时系统的维数与传递函数矩阵之间存在什么关系、传递函数矩阵描述方式与状态空间描述方式之间又有着怎样的关系,诸如此类的问题都要求我们扩展系统的描述方式,通过新的描述方式定义系统的结构以及各种概念;然后进一步对系统进行分析。
右MFD 和左MFD考虑p 维输入和q 维输出的连续时间时不变系统,设表征其输入输出关系的传递函数G (s )为p q ⨯有理分式矩阵。
定义8.1 右MFD如果对于G (s ),如果存在p q ⨯多项式矩阵N (s ) 和非奇异的p p ⨯多项式D (s )使:)()()(1s D s N s G -= (8.1)则称(8.1)是G (s )的一个右MFD 。
自动控制原理(第三版)第2章控制系统的数学模型(2)

自动控制原理
第二章 控制系统的数学模型
求取该电路在单位阶跃输入时的响应。 U c ( s) 1 G( s ) T RC U r ( s ) Ts 1
ur 1( t )
方法1
U c ( s ) G( s )U r ( s )
1
U r (s)
1 s
方法2
1 (Ts 1) s
1 t 1 g (t ) 1[G ( s)] e T T t uc (t ) g (t )ur ( )d
0 1 1 ( t ) t t 1 T 1 T e d e e T d 0T 0 T t
1 uc (t ) L [ ] (Ts 1) s T 1 1 1 L ( )L ( ) s Ts 1 1 e
大连民族学院机电信息工程学院
自动控制原理
第二章 控制系统的数学模型
传递函数的求法
例2-1 方法一 R-L-C串联电路
d 2 uc ( t ) R duc ( t ) 1 1 uc ( t ) ur ( t ) 2 dt L dt LC LC传递Fra bibliotek数: G( s)
U c ( s) 1 U r ( s) LCs 2 RCs 1
大连民族学院机电信息工程学院
自动控制原理
第二章 控制系统的数学模型
零、极点分布图
传递函数的零、极点分 布图: 将传递函数的零、 极点表示在复平面上的 图形。
零点用“o”表示 极点用“×”表示
j
1 -3 -2
-1
s2 G( s) = ( s 3)( s 2 2s 2)
大连民族学院机电信息工程学院
第2章(3) 系统传递函数

特点:输出滞后于输入,但不失真。
例 4:
U o ( s) RCs Ts G( s) U i (s) 1 RCs Ts 1
5.一阶超前环节 (一阶微分环节)
i (t ) xi (t ) xo (t ) 微分方程: Tx
传递函数: G( s) Ts 1 时间响应:
单位阶跃响应 1 0
单位斜坡响应 t
(3)一切物理系统都有n≥m 3.传递函数的物理意义 传递函数是系统单位脉冲响应的象函数
xi (t ) (t ) , X i (s) 1
X o ( s) G( s) X i ( s) G( s)
1 1
xo (t ) L1 [ X o ( s)] L1[G( s)] w(t ) G( s ) L[ w(t )]
§2.2 系统的传递函数
一、传递函数
( n) ( n 1) an xo (t ) an1 xo (t ) a1 x o (t ) a0 xo (t )
( m) ( m1) bm xi (t ) bm1xi (t ) b1x i (t ) b0 xi (t )
(n m) 作拉氏变换(在零初始条件下) n m (an s a1s a0 ) X o ( s) (bm s b1s b0 ) X i ( s) (n m) 1.定义:
m b s b1s b0 (n m) L[ xo (t )] X o ( s) m G( s) n a s a1s a0 L[ xi (t )] X i ( s) n
2
特征量——
时间常数: T
固有振荡频率: n 1T
阻尼比:
0 1 : 欠阻尼(振荡) 1: 临界阻尼 1 : 过阻尼
数学模型-传递函数
1 1 , j ,Ti zj pi ( pi )
( z j )
m
(3) 二项式表示法:
如 p1 . p2为一对共轭复数,则有
1 1 2 ( s p1 )( s p2 ) s 2 n s n 2
1 1 2 2 或 (T1 s 1)(T2 s 1) T s 2Ts 1
当初始条件为零时有:
3
第二章 数学模型
传 递 函 数(续)
C ( s ) b0 s m b1 s m 1 bm 1 s bm 则G ( s ) R( s ) a 0 s n a 1 s n 1 a n 1 s a n
s j 为复数, G (s ) 是复变量s 的函数, 故称为复放大系数。
i 1
m
(s z )
当s
z j时,G(s) = 0. z j 为传函的零点。
10
当 s pi 时,G(s) = , pi 为传函的极点。
第二章 数学模型
而 K g b0 ——传递系数。(根轨迹中叫根轨迹增益)
a0
(2)时间常数表示法:
bm d m s m d m 1 s m 1 d 1 s 1 G( s ) a n c n s n c n 1 s n 1 c 1 s 1
其传递函数为
6. 齿轮系
m
Z1
Z2
c
第二章 数学模型
§2-2 传 递 函 数
用拉氏变换求解微分方程,虽思路清晰,简单实用,但 如果系统参数改变,特征方程及其解都会随之改变。 要了解参数变化对系统动态响应的影响,就必须多次 计算,方程阶次愈高,计算工作量越大,故引入另一 种数模—传递函数。它是控制理论中的重要概念和工具, 也是经典理论中两大分支—根轨迹和频率响应的 基础。利用传递函数不必求解微方就可研究初始条件 为零的系统在输入信号作用下的动态过程。
《控制工程》传递函数
1.系统由单变量非线性函数所描述
df 1 d2 f Dx + Dx 2 f ( x) f ( x0 ) + dx x 2! dx 2 0 x0 1 d3 f + 3! dx 3 D x 3 + LL f ( x0 ) +
y= f (x) y(t):输出 x(t):输入 df Dx dx x 0 df Dx dx x 0
1、机械平移系统(即m、c、k系统)
第二章 传递函数
原则:根据牛二定律列写相应的动力学方程
y(t)
质量m
m
Fm m(t ) y
y2
弹簧k
y1
k
压弹簧:Fk=k(y1-y2) 拉弹簧: Fk=k(y2-y1)
压:说明y1要大于y2,这才有压的效果 其中y1与y2之差为弹簧的净形变量
阻尼c
y1 c y2
( ( an X 0n) (t ) + an1 X 0n 1) (t ) + … + a0 X 0 (t )
X0(t)——系统输出
bm X i( m) (t ) + bm1 X i( m1) + … + b0 X i (t )
Xi(t)——系统输入
3.根据系统微分方程对系统进行分类 1)线性系统:方程只包含变量X0(t)、Xi(t)的各阶导数 a.线性定常系统:an…a0 ;bm…b0为常数 b.线性时变系统:an…a0 ;bm…b0为时间的函数
第二章 传递函数
一、定义
定义:对于单输入、单输出线性定常系统,当输入 输出的初始条件为零时,其输出量的拉氏变 换与输入量的拉氏变换之比。 设线性定常系统的微分方程为:
a n x(0n)( t ) + a n 1 x(0n 1)( t ) + L + a0 x0( t )
《自动控制原理》第二章传递函数
G2 ( s ) N ( s) 1 + G1 ( s)G 2 ( s) H ( s)
∑ C ( s ) = Φ ( s) R( s) + Φ ( s) N ( s) =
G2 ( s )[G1 ( s) R ( s) + N ( s )] 1 + G1 ( s)G 2 ( s ) H ( s)
20
N ( s)
14
例2.23
R(s)
G4 G1 A G3 H2 H1
C
p1 = G1G2G3
_
-
B
G2
C (s)
∆1 = 1
L1 = −G1 G 2 H 1
p2 = G1G4
∆2 = 1
L2 = − G 2 G 3 H 2 L3 = −G 1 G 2 G3
L4 = − G 4 H 2
注意:回路 注意: 找不全是最 大的问题
5
1 R 1 G1 -1 1 G2 -1 1 G3 -1 K C
1
-1
•前向通路:开始于输入节点,沿支路箭头方向,每个节点 前向通路:开始于输入节点,沿支路箭头方向, 前向通路 只经过一次,最终到达输出节点的通路称之前向通路。 只经过一次,最终到达输出节点的通路称之前向通路。 •回路:起点和终点在同一节点,并与其它节点相遇仅一次的通路。 回路:起点和终点在同一节点,并与其它节点相遇仅一次的通路。 回路 •回路中所有支路的乘积称为回路增益。 回路中所有支路的乘积称为回路增益。 回路中所有支路的乘积称为回路增益 •不接触回路:回路之间没有公共节点时, 不接触回路:回路之间没有公共节点时, 不接触回路 不接触回路。 这种回路叫做 不接触回路。 •在信号流图中,可以有两个或两个以上不接触回路。 在信号流图中, 在信号流图中 可以有两个或两个以上不接触回路。
2第二章 2控制系统的传递函数模型
(S Z
i 1 n j 1
m
i
)
(S P )
j
Zi (i=1,2,…,m) 是分子多项式的根,称为传递函数的零点
pj (j=1,2,…,n) 是分母多项式的根,称为传递函数的极点
K *=b0/a0
称为传递函数的传递系数(根轨迹增益)
传递函数的零极分布图
为了更直观、更形象地 p2 × p1× z1
4、理想微分环节
微分方程 c(t)= Tdr(t)/dt 传递函数 G(s)=Ts 特点: 输出量正比输入量变化的速度,能 预示输入信号的变化趋势。 实例:集成运放的微分运算,测速发电 机输出电压与输入角度间的传递函数即为 微分环节。
5、一阶微分环节(或称比例微分环节)
微分方程 c(t)= Tdr(t)/dt + r(t) 传递函数 G(s)=Ts+1 特点: 输出量既包含与输入量成正比的量, 又包含输入信号的变化趋势。 实例:集成运放的比例微分运算等。
0 1 n 1 n
G( s)
例1、试求RC无源网络的传递函数
uo(s)/u (s)
i
解答:
RC网络的微分 方程表示为
Ui
R1
R2
i (t ) C 1
C2
Uo
d 2 uo ( t ) duo ( t ) R1 R2 C 1C 2 ( R1C 1 R1C 2 R2 C 2 ) 2 dt dt uo ( t ) ui ( t )
主要内容:
第一讲、 时域数学模型
第二讲、 复域数学模型 第三讲、 方框图与信号流图
本章要求:
一、了解控制系统数学模型的建立方法及数学 模型的表示形式。 二、掌握控制系统时域、复域数学模型的建立
第2章_控制系统的动态数学模型_2.4传递函数以及典型环节的传递函数
第2章 控制系统的动态数学模型 2.4 传递函数以及典型环节的传递函数
2.4.1 传递函数的基本概念 (1)传递函数的定义 )
线性定常系统在零初始条件下,输出量的 拉氏变换与输入量的拉氏变换之比,称为该系统 的传递函数。
X o (s ) G (s ) = X i (s )
m n bm * K = =K ∏(-Zi ) / ∏(− pj ) an i=1 j =1
∏(s − zj ) j=1
m
∏(s − pi ) i=1
n
为传递函数的增益
b0 K = a0
*
为根轨迹增益
T和τi 为时间常数 i
零、极点分布图:
b0(s − z1)(s − z2 )… (s − zm) M(s) … G(s) = = a0 (s − p1)(s − p2)… (s − pn ) D(s) …
描述该线性定常系统的传递函数为
…+bm−1s + bm Xo (s) b0sm + bsm−1 +… 1 G(s) = = Xi (s) a0sn + a1sn−1 +… …+ an−1s + an M(s) = D(s)
式 : (s) = b0sm + bsm−1 +… 中 M …+ bm−1s + bm 1 D(s) = a0sn + a1sn−1 +… …+ an−1s + an
LCs U c ( s ) + RCsU c ( s ) + U c ( s ) = U r ( s )
2
按照定义,系统的传递函数为:
U c (s) 1 = G (s) = U i ( s ) LCs 2 + RCs + 1
第二章(概念,微分方程,传递函数)
取一次近似, 取一次近似,且令
y( x) = y( x) y( x0 )
≈ E0 sin x0 ( x x0 )
既有
≈ E0 sin x0 ( x x0 )
y = E0 sin x0 x
12
第二章 控制系统的数学模型
控制系统三域的数学模型关系
微分方程 t (时域)
L L
1
F F 1
系统
《自动控制理论》 自动控制理论》
江苏大学电气学院自动化系 张军
1
第二章 控制系统的数学模型
§2.1 §2.2 §2.3 §2.4 控制系统数学模型的概念 微分方程描述 传递函数 结构图
2
第二章 控制系统的数学模型
2.1 数学模型的概念
数学模型: 数学模型: 是描述系统特性或状态的数学表达式。它表达了系统输入 是描述系统特性或状态的数学表达式。它表达了系统输入 输出及系统各变量之间的定量关系 关系。 输出及系统各变量之间的定量关系。是系统内部本质信息的反 是系统内在客观规律的写照或缩影。 举例:电路模型) 映。是系统内在客观规律的写照或缩影。(举例:电路模型) 建模目的: 建模目的: 可以定量分析系统动静态性能,看是否能满足生产工艺要求。 动静态性能 1. 可以定量分析系统动静态性能,看是否能满足生产工艺要求。 可以用于定量的控制计算 对系统行为进行预测, 定量的控制计算, 2. 可以用于 定量的控制计算 , 对系统行为进行预测 , 并加以控 制。控制精度与模型精度有关。 控制精度与模型精度有关。 3. 利用模型可以进行有关参数的寻优 。
①标准形式
K W (s) = S
N
∏
m
(T i S + 1) (T j S + 1)