系统建模与仿真结课作业
系统建模与仿真答案
1名词解释:(1)系统:按照某种规律组合起来,互相作用、互相依存的所有实体的集合或总和(2)连续系统:系统状态量随时间连续变化,可以通过微分方程或者偏微分方程来描述。
(3)离散事件系统:系统状态是在离散的随机时点上发生变化,且状态在一段时间内保持不变(4)系统仿真过程:建立模型并通过模型在计算机上的运行对模型进行检验、修正和分析的过程2、什么是系统建模与仿真技术?系统建模与仿真技术是以相似原理、模型理论、系统技术、信息技术以及建模与仿真应用领域的有关专业技术为基础,以计算机系统、与应用相关的设备及仿真器为工具,利用模型参与已有或设想的系统进行研究、分析、设计、加工、生产、试验、运行、评估、维护和报废(全生命周期)活动的一门多学科的综合技术。
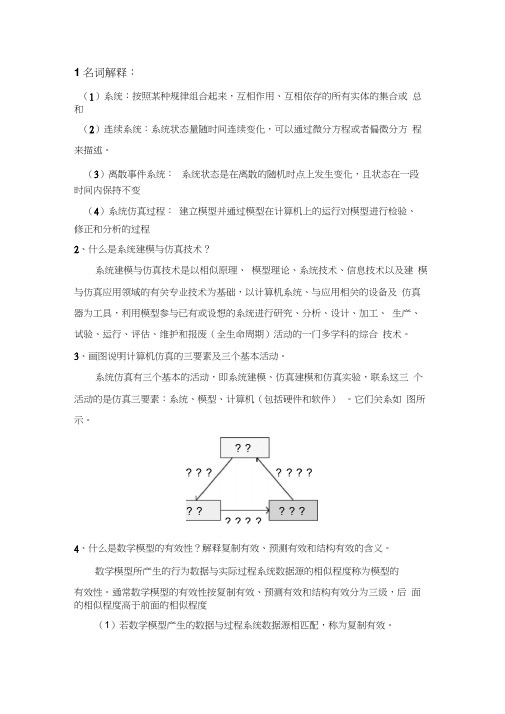
3、画图说明计算机仿真的三要素及三个基本活动。
系统仿真有三个基本的活动,即系统建模、仿真建模和仿真实验,联系这三个活动的是仿真三要素:系统、模型、计算机(包括硬件和软件)。
它们关系如图所示。
4、什么是数学模型的有效性?解释复制有效、预测有效和结构有效的含义。
数学模型所产生的行为数据与实际过程系统数据源的相似程度称为模型的有效性。
通常数学模型的有效性按复制有效、预测有效和结构有效分为三级,后面的相似程度高于前面的相似程度(1)若数学模型产生的数据与过程系统数据源相匹配,称为复制有效。
(2)在过程系统数据源取得之前,可以得到数学模型产生的数据与过程系统数据源的匹配情况,称为预测有效。
(3)数学模型不仅具有预测有效特性,而且可以反映出产生这些行为数据的内在原因,称为结构有效。
5、动态数学模型求解的实时性要求是什么?常用哪些方法提高实时性?动态数学模型运行特点是按选定的积分时间步长,每跨进一个步长,需将全部数据模型求解一遍,一直运行到收到停止命令。
经验证明:积分步长选1s 可以达到实时要求。
提高模型实时性常用的方法有:(1)通过预先试算找出规律,尽量避开非线性代数方程组的迭代计算;(2)使用回归或者辨识的方法获取简化降阶模型;(3)使用欧拉法求解高阶微分方程;(4)偏微分方程简化为常微分方程;(5)采用稳态加动态补偿方法获取动态响应。
系统建模与仿真实验二

实验二 动态系统的Simulink 仿真一、实验目的:1、掌握Simulink 使用的基本方法;2、熟悉连续系统仿真设计的基本方法;二、实验内容:1、编写M 脚本文件编写一个M 脚本文件,绘制函数⎪⎩⎪⎨⎧>+-≤<≤=3,630,0,sin )(x x x x x x x y在区间[-5,5]中的图形。
x=-5:0.1:5; % 设定系统输入范围与仿真步长leng=length(x); % 计算系统输入序列长度for i=1:leng % 计算系统输出序列if x(i)<=0 % 逻辑判断y(i)=sin(x(i));else if (x(i)>0&&x(i)<=3)y(i)=x(i);elsey(i)=-x(i)+6;endendendplot(x,y);grid;2、编写和调用M 函数编写一个M 函数,表示出如下函数关系t=0:0.1:3;leng=length(t);for i=1:lengif t(i)<=1;y(i)=t(i).^2;elsey(i)=t(i).^(1/2);endendplot(t,y);grid;⎪⎩⎪⎨⎧>∈=1,]1 ,0[,212t u t uy并用M脚本文件调用该函数,绘制其在[0,3]区间内的图像。
3.一个生长在罐中的细菌的简单模型。
要求给各模块和信号线改名称、改颜色或增加阴影。
假定细菌的出生率和当前细菌的总数成正比,死亡率和当前的总数的平方成正比。
若以x 代表当前细菌的总数,则细菌的出生率可表示为:_birth=ratebx细菌的死亡率可表示为:2death=rate_px细菌总数的总变化率可表示为出生率与死亡率之差。
因此系统可表示为如下的微分方程形式:2px=x-bx假定h;/5==,当前细菌的总数为1000,建立其simulink模型,.0phb/05并绘制细菌总数变化图。
4.根据种群增长曲线的数学方程进行simulink仿真,并正确设置参数,绘制出种群增长的“J”型曲线和“S”型曲线。
结构建模与仿真作业

仿真方法在管理理论研究中的应用【摘要】仿真作为一种系统建模方法在自然科学、工程技术、社会经济系统等方面都得到了广泛的应用。
它通过个体间的微观互动来考察涌现出来的宏观现象,进而了解整个系统的运行过程。
由于其独特的研究思路,仿真研究的价值已不仅仅局限于“预测”与“仿真”,其在管理理论研究中具有巨大的应用价值。
回顾了仿真建模思想的演变,讨论了仿真研究在理论发展中的作用和地位,重点介绍了最著名的研究组织适应度的仿真模型—NK模型,并使用一个将随机仿真方法和结构化仿真方法相结合的实例,来介绍如何将仿真方法应用于管理研究,最后就仿真建模步骤及其后续研究的开展进行评论。
关键词:仿真方法;多Agent建模;NK模型;理论研究Applying Simulation Method to Management Theory Research 【Abstract】Simulation provides a powerful methodology for natural science, engineering technology and social science.It focuses on modeling the adaptive actor making up the social system and who influence each other, as the result of the interaction the system property is emergent.We propose that because of the unique character of this method simulation has potential to contribute management research.After reviewing the history of the simulation method development and discussing the status in research we introduce a famous model, which focuses on the organization adaptation—NK model.And then we combine the structure method and the stochastic method to show how to apply the simulation method to management research.At last we discuss the process of this method and propose the applying future.Key words: simulation; multi—agent; emergence; knowledge transfer; innovation strategy1 引言随着复杂科学的兴起,人们对复杂系统的研究放弃了还原分解的方法,提倡采用一种自下而上的综合集成方法。
系统建模和计算机仿真课程总结

系统建模和计算机仿真课程总结第一章1.系统:按照某些规律结合起来,互相作用、互相依存的所有实体的集合或总和。
模型:真实对象、对象间关系的特性抽象,描述某些系统本质。
仿真:通过对模型的实验以达到研究系统这个目的。
2.同态:系统与模型在行为级上等价。
同构:系统与模型在结构级上等价。
黑箱:可观测输入、输出值,但不知内部结构的系统(通过输入和输出推断其内部结构)白箱:已知内部结构的系统(灰箱:介于黑箱和白箱之间)3.演绎:应用先验理论,补充假设和推理,通过数学逻辑演绎建模,是一个从一般(抽象)到特殊(具体)的过程。
归纳:从系统的行为级开始,逐步获得系统结构级的描述。
是一个从特殊(具体)到一般(抽象)的过程。
推理结果往往不是唯一解。
4.面向对象仿真:从人类认识世界模式出发,使问题空间和求解空间一致,提供更自然直观、可维护、可重用的系统仿真框架。
定性仿真:力求非数字化,以非数字手段处理信息输入、建模、行为分析和结构输出,通过定性模型推导系统定性行为描述。
智能仿真:力求非数字化,以非数字手段处理信息输入、建模、行为分析和结构输出,通过定性模型推导系统定性行为描述。
可视化仿真:用于为仿真过程及结果增加文本提示、图形、图像、动画表现,使仿真过程更加直观,并能验证仿真过程是否正确。
虚拟现实仿真:由计算机全部或部分生成的多维感觉环境,给参与者产生各种感官信号,若视觉、听觉、触觉等,使参与者身临其境。
第二章1.系统建模原则:(1)可分离原则:系统中的实体不同程度上均相互关联,结合建模目标合理忽略某些关联。
依赖于系统环境的界定、系统因素的提炼即约束条件与外部条件的设定。
(2)合理假设原则:任何模型的建立均应基于某些合理的假设,以简化模型,有利于仿真的实现。
(3)因果性原则:系统的输入和输出满足函数映射关系。
(4)可测量、选择原则:输入量和输出量可量化。
2.系统模型分类:(1)根据模型的时间集合连续时间模型:时间用实数表示,系统的状态可以在任意时刻点获得。
系统建模与仿真报告

系统建模与仿真报告姓名:葛海军学号:0411420841系统建模与仿真作业一. 产生十种随机分布的数:1.(0-1)之间的均匀分布:概率密度函数:⎩⎨⎧≤≤=其他0101)(x x P ; 产生思想:采用乘同余法产生;具体实现方法:n n ux x =+1 (mod m );参数:取正整数,为初始值一般取为正整数;,或一般取b b x a a u 1253203+±;m 一般取计算机的字长,其是控制所产生随机数的精度(即:小数点后的位数); 程序(具体程序见附录)实现中取u=11,m=100000,0x 的取值是随机赋的;参数估计:在matlab 命令窗口键入y=junyun(10240);就可以产生10240个随机数保存在向量y 中,然后再键入zhifangtu (y ,100)(调用直方图来对其进行检验),运行结果如下:然后在计算这10240个数的均值和方差在命令窗口键入z=canshu (y ),运行结果为:z=[0.50038 0.083263]其中0.50038表示所产生的数据的均值,0.083263表示所产生数据的方差,而(0-1)之间的均匀分布的随机数的数学期望为0.5,与上面所求出的0.50038很接近,方差0.083263近似与0,于是这种产生方法已经符合要求。
2.瑞利分布随机数的产生概率密度函数:⎪⎩⎪⎨⎧<≥=-000)(2222x x e x x P xσσ; 产生思想:利用直接抽样法产生;具体实现方法:a .先调用产生(0-1)之间的均匀分布的函数(y=junyun(n))产生一组(0-1)之间均匀分布的随机数保存在向量x 里;b .然后作2ln z y =-;c .另z y σ=,于是向量y 就是要产生的瑞利分布的随机数;参数估计:在matlab 命令窗口键入y=ruili(1,10240);就可以产生10240个随机数保存在向量y 中,然后再键入zhifangtu (y ,100)(调用直方图来对其进行检验),运行结果如下:然后在计算这10240个数的均值和方差在命令窗口键入z=canshu (y ),运行结果为:z=[1.255 0.43138]其中1.255表示所产生的数据的均值,0.43138表示所产生数据的方差,而瑞利分布的数学期望计算式为:1σσ=,代入计算得: 1.253,与上面所求出的随机数的平均值 1.2555相当接近,瑞利分布方差的计算公式为:224σπ-当1σ=时代入计算得0.42920与0.43138相当接近,于是这种产生方法已经符合要求。
基于Flexsim的配送中心仿真分析报告

物流系统建模与仿真结课作业论文名称:基于Flexsim的配送中心仿真分析报告目录一、案例背景1二、模型的设计21、问题的解决思路22、模型的描述23、建模步骤2三、模型的运行与分析41、模型的运行42、运行数据43、瓶颈分析5四、模型的优化51、瓶颈问题的解决方案52、优化后的运行数据5五、结论6一、案例背景DC配送中心位于北京市东四环外的大郊亭桥附近,主要为北京城八区的家乐福、华联、美廉美、物美等超市提供配送服务。
该配送中心总面积约为1200平方米,分为A、B两个库,面积一样,A库主要存放方便面、饼干、巧克力这三种商品,B库则存放大米、面粉等商品.这两年,A库存放的三类商品的需求量呈现上升趋势,从而导致了该配送中心的库存增加,日发货量提高等问题。
目前,A库里面设有2列入库商品存放货架,剩余的空间完全可以再摆放一个货架,空间利用率较低。
A库现在每天的到货量约500箱,每箱货物为20件。
货物到货后,直接将整箱货物码放在货架上,不严格按照货物摆放;另外,现有的入库商品存放货架已不能满足需求,有的货物只能放在地上,不仅显得杂乱无章,而且还会影响员工的行动.而且两个货架上随意摆放三种商品,没有进行区域的划分,经常出现货架摆放是方便面商品的地方会夹杂着巧克力和饼干等商品,使员工拣货效率大为降低。
货物在分拣区以件为单位摆放,发货前需要进行装箱工作,然后再采用托盘进行装车运输。
该配送中心目前有10名工作人员,由于业务量的增加,精减员工肯定已经行不通了,但员工的工资占到了仓库总成本的很大一部分,所以该配送中心也不考虑另外招人。
如何对DC配送中心的A仓库进行改进,使其仓储能力和分拣能力满足其配送业务量的需求是该配送中心当前急需解决的问题。
针对该配送中心存在的问题,可以采用Flexsim软件进行仿真,帮助DC配送中心其解决仓储能力和分拣能力的问题.二、模型的设计1、问题的解决思路针对DC配送中心目前存在的问题,本文提出了以下解决思路:(1)A库再购置一个入库商品存放货架,一方面可以解决当前货架不能满足存放需求的问题,另一方面还可以提高仓库的储存能力。
系统建模与仿真实验报告
系统建模与仿真实验报告系统建模与仿真实验报告1. 引言系统建模与仿真是一种重要的工程方法,可以帮助工程师们更好地理解和预测系统的行为。
本实验旨在通过系统建模与仿真的方法,对某个实际系统进行分析和优化。
2. 实验背景本实验选择了一个电梯系统作为研究对象。
电梯系统是现代建筑中必不可少的设备,其运行效率和安全性对于整个建筑物的使用体验至关重要。
通过系统建模与仿真,我们可以探索电梯系统的运行规律,并提出优化方案。
3. 系统建模为了对电梯系统进行建模,我们首先需要确定系统的各个组成部分及其相互关系。
电梯系统通常由电梯、楼层按钮、控制器等组成。
我们可以将电梯系统抽象为一个状态机模型,其中电梯的状态包括运行、停止、开门、关门等,楼层按钮的状态则表示是否有人按下。
4. 仿真实验在建立了电梯系统的模型之后,我们可以通过仿真实验来模拟系统的运行过程。
通过设定不同的参数和初始条件,我们可以观察到系统在不同情况下的行为。
例如,我们可以模拟电梯在高峰期和低峰期的运行情况,并比较它们的效率差异。
5. 仿真结果分析通过对仿真实验结果的分析,我们可以得出一些有价值的结论。
例如,我们可以观察到电梯在高峰期的运行效率较低,这可能是由于大量乘客同时使用电梯导致的。
为了提高电梯系统的运行效率,我们可以考虑增加电梯的数量或者改变乘客的行为规则。
6. 优化方案基于对仿真结果的分析,我们可以提出一些优化方案来改进电梯系统的性能。
例如,我们可以建议在高峰期增加电梯的数量,以减少乘客等待时间。
另外,我们还可以建议在电梯内设置更多的信息显示,以便乘客更好地了解电梯的运行状态。
7. 结论通过本次实验,我们深入了解了系统建模与仿真的方法,并应用于电梯系统的分析和优化。
系统建模与仿真是一种非常有用的工程方法,可以帮助我们更好地理解和改进各种复杂系统。
在未来的工作中,我们可以进一步研究和优化电梯系统,并将系统建模与仿真应用于更多的实际问题中。
8. 致谢在本次实验中,我们受益于老师和同学们的帮助与支持,在此表示诚挚的感谢。
《系统建模与仿真实验》

安徽工业大学
《系统建模与仿真实验》
结课作业
作业题目:多产品生产系统建模与仿真
学院:
专业:
班级:
学号:
姓名:
2016年11月1日
目录
1.问题背景 (3)
1.1背景 (3)
1.2相关数据 (3)
1.3要求 (3)
2.建模仿真步骤 (4)
2.1模型建立 (4)
2.2参数设置 (4)
2.3模型运行 (6)
2.4系统问题 (7)
3.改善方案及效果 (7)
1.问题背景
1.1背景:一个工厂有5个不同的车间(普通车间,钻床车间,铣床车间,磨床车间,检测车间),加工3种类型产品。
每种产品都在5个不同的车间完成5道工序。
1.2相关数据:
1.3要求:
(1)建立上述多产品生产系统的仿真模型;
(2)查看系统运行情况报告;
(3)如存在瓶颈,请给出改善方案。
2.建模仿真步骤2.1模型建立
2.2参数设置
(1)发生器设置
运行结果
(2)处理器设置
2.3模型运行
2.4系统问题
由上图可知在暂存区1和暂存区5都有产品堆积现象。
堆积的下一工序就是瓶颈工序。
3.改善方案及效果
对生产产品工序分析,应运并行工程原理进行相似工艺合并,可以适当加大产品周转占用量,同时根据自身生产能力,制定相应的批量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第三章 1、 clear; ST=900;Dt=2;NP=ST/Dt;R=1; for i=1:1:6 if i==2
x10=0;x11=0;x20=0;x21=0;x30=0;x31=0;x40=0;x41=0;x50=0;x51=0;x60=0;x61=0;x70=0;x71=0;U10=0;U11=0; dat=5.5;Ti=51;Td=7.6; a1=Dt/(dat*Ti);a2=exp(-Dt/(0.1*Td));a3=exp(-Dt/10); for j=1:NP y(j)=x71; U11=R-x70; x11=x10+a1*U11; x21=a2*x20+10*(a2-1)*U11/dat; U21=1/dat*U11+x11+x21+10/dat*U11; x31=a3*x30+(1-a3)*U21; x41=a3*x40+(1-a3)*x31; x51=a3*x50+(1-a3)*x41; x61=a3*x60+(1-a3)*x51; x71=a3*x70+(1-a3)*x61; x10=x11;x20=x21;x30=x31;x40=x41;x50=x51;x60=x61;x70=x71; end plot((1:NP)*Dt,y,'r') hold on; end if i==3
x10=0;x11=0;x20=0;x21=0;x30=0;x31=0;x40=0;x41=0;x50=0;x51=0;x60=0;x61=0;x70=0;x71=0;U10=0;U11=0; dat=5.5;Ti=43.2;Td=10.8; a1=Dt/(dat*Ti);a2=exp(-Dt/(0.1*Td));a3=exp(-Dt/10); for j=1:NP y(j)=x71; U11=R-x70; x11=x10+a1*U11; x21=a2*x20+10*(a2-1)*U11/dat; U21=1/dat*U11+x11+x21+10/dat*U11; x31=a3*x30+(1-a3)*U21; x41=a3*x40+(1-a3)*x31; x51=a3*x50+(1-a3)*x41; x61=a3*x60+(1-a3)*x51; x71=a3*x70+(1-a3)*x61; x10=x11;x20=x21;x30=x31;x40=x41;x50=x51;x60=x61;x70=x71; end plot((1:NP)*Dt,y,'r') hold on; end if i==4
x10=0;x11=0;x20=0;x21=0;x30=0;x31=0;x40=0;x41=0;x50=0;x51=0;x60=0;x61=0;x70=0;x71=0;U10=0;U11=0; dat=5.84;Ti=30;Td=10; a1=Dt/(dat*Ti);a2=exp(-Dt/(0.1*Td));a3=exp(-Dt/10); for j=1:NP y(j)=x71; U11=R-x70; x11=x10+a1*U11; x21=a2*x20+10*(a2-1)*U11/dat; U21=1/dat*U11+x11+x21+10/dat*U11; x31=a3*x30+(1-a3)*U21; x41=a3*x40+(1-a3)*x31; x51=a3*x50+(1-a3)*x41; x61=a3*x60+(1-a3)*x51; x71=a3*x70+(1-a3)*x61; x10=x11;x20=x21;x30=x31;x40=x41;x50=x51;x60=x61;x70=x71; end plot((1:NP)*Dt,y,'g') hold on; end if i==5
x10=0;x11=0;x20=0;x21=0;x30=0;x31=0;x40=0;x41=0;x50=0;x51=0;x60=0;x61=0;x70=0;x71=0;U10=0;U11=0; dat=5.2;Ti=45;Td=11; a1=Dt/(dat*Ti);a2=exp(-Dt/(0.1*Td));a3=exp(-Dt/10); for j=1:NP y(j)=x71; U11=R-x70; x11=x10+a1*U11; x21=a2*x20+10*(a2-1)*U11/dat; U21=1/dat*U11+x11+x21+10/dat*U11; x31=a3*x30+(1-a3)*U21; x41=a3*x40+(1-a3)*x31; x51=a3*x50+(1-a3)*x41; x61=a3*x60+(1-a3)*x51; x71=a3*x70+(1-a3)*x61; x10=x11;x20=x21;x30=x31;x40=x41;x50=x51;x60=x61;x70=x71; end plot((1:NP)*Dt,y,'g') hold on; end end 010020030040050060070080090000.10.20.30.40.50.60.70.80.91 2、 clear; ST=500;Dt=0.4;NP=ST/Dt;dat=0.43;dat2=0.05;Ig=1;Ti=98;R=1 x10=0;x11=0;x20=0;x21=0;x30=0;x31=0;x40=0;x41=0;x50=0;x51=0;U10=0;U11=0;U20=0;U21=0; a1=Dt/(dat*Ti);a2=exp(-1/15*Dt);a4=exp(-1/30*Dt); for j=1:NP y1(j)=x51; y2(j)=x31; U11=Ig-0.1*x51; x11=x10+a1*U11; U21=(x11+U11/dat-0.1*x30)/dat2+R; x21=a2*x20+(10-10*a2)*U21; x31=a2*x30+(1-a2)*x21; x41=a4*x40+(1-a4)*x31; x51=a4*x50+(1-a4)*x41; x10=x11;x20=x21;x30=x31;x40=x41;x50=x51; end plot((1:NP)*Dt,y1) hold on; plot((1:NP)*Dt,y2,'g') 0501001502002503003504004505000510152025303540 第四章 1、 clear; num=[4 1.8]; den=[4800 1840 83 1]; G=tf(num,den) G1=zpk(G)
G = 4 s + 1.8 ------------------------------ 4800 s^3 + 1840 s^2 + 83 s + 1
Continuous-time transfer function.
G1 = 0.00083333 (s+0.45) ---------------------- (s+0.3333) (s+0.025)^2
clear; ST=1000;Dt=0.2;NP=ST/Dt;dat=0.19;Ti=151; x10=0;x11=0;x20=0;x21=0;x30=0;x31=0;x40=0;x41=0;x50=0;x51=0; d10=0;d11=0;d20=0;d21=0;e10=0;e11=0;e20=0;e21=0;e30=0;e31=0;e40=0;e41=0;e50=0;e51=0; Ig=1; for i=1:NP y1(i)=x21+x41+x51; y2(i)=Ig-y1(i); d10=Ig-(x20+x40+x50); e10=1/(dat*Ti)*d10; x11=x10+Dt*e10; d20=d10/dat+x10; e20=-0.3333*x20+0.0010*d20; x21=x20+Dt*e20; e30=-0.025*x30+0.0011*d20; x31=x30+Dt*e30; e40=x30-0.025*x40 x41=x40+Dt*e40; e50=-0.025*x50-0.0010*d20; x51=x50+Dt*e50; x10=x11;x20=x21;x30=x31;x40=x41;x50=x51; end plot((1:NP)*Dt,y1) hold on; plot((1:NP)*Dt,y2,'g')
01002003004005006007008009001000-0.4-0.200.20.40.60.811.21.4