一阶倒立摆系统建模与仿真研究
毕业设计一阶倒立摆的自适应滑模控制仿真研究
(二○○七年六月本科毕业设计说明书 题 目:一阶倒立摆的自适应滑模控制仿真研究 学生姓名:xx 学 院:xx 系 别:xx 专 业:xx 班 级:xx 指导教师:xx摘要倒立摆系统是一种非线性、高阶次、多变量、快速和自然不稳定的动态系统,是研究各种控制理论和方法的理想对象及典型试验装置。
在控制过程中能有效地反映诸如可镇定性、鲁棒性、随动性以及跟踪等许多控制中的关键问题。
因此,倒立摆机理的研究又具有重要的应用价值,成为控制理论中经久不衰的研究课题。
本文以一阶倒立摆系统为研究对象,研究其自适应滑模控制策略。
主要完成了以下工作:(1)利用动力学方程建立一阶倒立摆的数学模型,得出描述系统的微分方程。
(2)基于滑模变结构控制、模糊控制和自适应控制设计一阶倒立摆的自适应模糊滑模控制器,并对其进行了李雅普诺夫稳定性分析。
(3)在MATLAB/SIMULINK环境下,针对位置信号为正弦波和方波两种情况进行了该自适应模糊滑模控制器仿真研究。
仿真表明,控制效果良好。
尽管本文做了许多工作,但由于时间关系仅进行了仿真研究而未进行实物控制,有待于进一步实现。
关键词:滑动模态;变结构控制;模糊控制;倒立摆系统;李雅普诺夫函数AbstractInverted Pendulum, which is a dynamic system with nonlinearity, high equation orders, multivariable, fast reaction and instinct instability, has become an ideal object and typical experiment technique. Many key matters can be effectively reflected during the control process, such as steady, robustness, stochastic and track issues. Therefore, the research of inverted pendulum mechanism has lasted for many years due to its significant application value and has become an unfailing research task in the field of control theory.The paper uses the single inverted pendulum system as a research object to research its adaptive sliding mode fuzzy control strategy. The main research works are as follows:(1) We use dynamics equation to build the mathematical model of the single inverted pendulum and the differential equations describing the inverted pendulum are given.(2) Based on the principle of fuzzy control, sliding mode variable control and adaptive control, an adaptive sliding mode fuzzy controller for the single inverted pendulum is designed and its stability is analyzed by Lyapunov theorem of stability.(3) Aimed at the things of sine wave or square wave being position signal, we respectively simulated for the indirect adaptive fuzzy controller under MATLAB/SIMULINK environment and good simulation results are obtained.Though a lot of research work have been done in this paper, there are still many things to do such as single inverted pendulum’s real control.Key words:Sliding Mode ;Variable Structure Control ;Fuzzy Control;Inverted Pendulum System; Lyapunov theorem of stability.目录引言 (1)第一章概述 (2)1.1 倒立摆系统研究的意义 (2)1.2 滑模变结构控制 (2)1.3 倒立摆控制的发展及研究现状 (4)1.3.1 倒立摆控制的发展 (4)1.3.2 倒立摆的研究现状 (6)1.4 本文主要工作 (6)第二章一阶倒立摆的数学模型 (8)2.1 倒立摆系统的组成 (8)2.2 倒立摆工作原理 (8)2.3 倒立摆模型的数学建模 (9)第三章自适应滑模变结构控制理论基础 (11)3.1 滑模变结构理论的起源和背景 (11)3.2 滑模控制的基本概念及原理 (13)3.2.1 滑动模态的定义 (13)3.2.2滑模变结构控制的定义 (14)3.2.3滑动模态的数学表达 (14)3.2.4滑动模态存在和到达条件 (15)3.2.5滑动模态的不变性 (16)3.2.6滑模变结构控制系统的抖振问题 (18)3.3 模糊控制的原理 (18)3.4 李雅普诺夫稳定性分析 (22)第四章一阶倒立摆自适应滑模控制器设计与仿真 (24)4.1 自适应滑模控制器设计 (24)4.2 自控制算法设计及稳定性分析 (26)4.3 仿真研究 (28)4.3.1 S函数 (28)4.3.2 被控对象S函数程序设计 (28)4.3.3 控制器S函数程序设计 (29)4.3.4 作图程序设计 (30)4.3.5 Simulink主程序设计 (31)4.3.6 仿真研究 (32)结论 (35)1、工作总结 (35)2、研究展望 (35)参考文献 (37)附录A 位置信号为正弦波时有扰动的仿真程序 (38)附录B 位置信号为正弦波时无扰动的仿真程序 (44)附录C 位置信号为方波时的仿真程序 (46)谢辞 (52)引言杂技顶杆表演之所以为人们所熟悉,不仅是其技艺的精湛引人入胜,更重要的是其物理本质与控制系统的稳定性密切相关。
一级倒立摆系统

直线一级倒立摆建模与性能分析直线一级倒立摆建模及性能分析一、数学模型建立在忽略了空气阻力和各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如图1所示。
u 为外界作用力;x 为小车位移; 为摆杆与铅垂方向的夹角;O 、G 分别为摆杆与小车的链接点、摆杆质心的位置;M 为小车的质量;m 为摆杆的质量;J 为摆杆绕G 的转动惯量;l 为O 到摆杆质心的距离,L 为摆杆的长度;0f 为小车与导轨间的滑动摩擦系数,1f 为摆杆绕 O 转动的摩擦阻力矩系数。
对于上图的物理模型我们做以下假设: M :小车质量 m :摆杆质量 b :小车摩擦系数l :摆杆转动轴心到杆质心的长度 I :摆杆惯量 F :加在小车上的力 x :小车位置ɸ:摆杆与垂直向上方向的夹角θ:摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下)其机械部分遵守牛顿运动定律,其电子部分遵守电磁学的基本定律。
因此可以通过机理建模得到系统较为精确的数学模型。
应用牛顿力学来建立系统的动力学方程过程如下: 分析小车水平方向所受的合力,可以得到以下方程:N x b F xM --= 由摆杆水平方向的受力进行分析可以得到下面等式:22(sin )d N m x l dtθ=+即:2cos sin N mx ml ml θθθθ=+-把这个等式代入上式中,就得到系统的第一个运动方程:F ml ml x b x m M =-+++θθθθsin cos )(2(1-1) 为了推出系统的第二个运动方程,我们对摆杆垂直方向上的合力进行分析,可以得到下面方程:22(cos )d P mg m l dtθ-=-即:2sin cos P mg ml ml θθθθ-=+力矩平衡方程如下:θθθ I Nl Pl =--cos sin 注意:此方程中力矩的方向,由于θφθφφπθsin sin ,cos cos ,-=-=+=,故等式前面有负号。
合并这两个方程,约去P 和N ,得到第二个运动方程:θθθcos sin )(2xml mgl ml I -=++ (1-2) 1.1 微分方程模型设φπθ+=,当摆杆与垂直向上方向之间的夹角φ与1(单位是弧度)相比很小,即 1<<φ 时,则可以进行近似处理:1cos -=θ,φθ-=sin ,0)(2=dt d θ。
基于模糊控制和PID控制的一阶倒立摆系统建模与仿真
r 1
『1
摆杆 角度 和 小车 位移 的传 递 函数 为
f) s 0 0 75 . 2 s
X( ) 5
0 0 02 1 5 一0 2 70 ’ . 1 2 s . 6 5
摆杆 角度 和 小车 所受 外界 作用 力 的传递 函数为
一
:
三鱼
U( ) 一 8 S 3+0 0 83 67 一2 . 1 s一2 3 94 . 8 l s 7 9 69 . 0 2。
控制策略对系统平衡控制的有效性 , 同时也展示 了它们 的控制品质和特性.
关键词 : 倒立摆 ;I 模糊控制 ; 真 PD; 仿
中 图 分 类 号 :P 7 T 23 文献标志码 : A
Fi s - r e nv r e n u u n r lS se o e i g a d r to d r I e t d Pe d l m Co t o y t m M d l n n S m u a i n Ba e n Fu z n r la d PI Co r l i l to s d o z y Co t o n D nt o
Absr c :Th e e r h o h o to lc ft e frto d ri v re e u u b l n e is e wa s rb d A tat e r s a c n t e c n r lpoiy o h s— r e n e td p nd l m aa c s u sde c i e . i mah ma ia de s e tb ih d frt t e h u z o to oiy a d P D o to o iy h d b e p le n t e tc lmo lwa sa ls e s ,h n t e f z y c n r lp lc n I c n r lp l a e n a p i d i i c t e in o o r le e p cie y, tls ,h i l t n r s a c n t o to y tm sc rid o y u i g he d sg fc ntol rr s e tv l a a t t e smu a i e e r h o hec nr ls se wa are utb sn o Malb i l k s f r .T e u t o h smu ai n e e r h ho t t t e o to p lc s fe tv t e ta /S mu i o t e he r s ls f t e i lto r s a c s w ha h c n r l oi y i ef ci e, h n wa c n r lq aiy a d c n r lc a a t ro h o to oi is h d s o o to u lt n o to h r ce ft e c n r lp l e a h wn. c Ke r y wo ds:i v re e d l m ; D ;u z o to ; i lto n et d p n u u PI f z y c n r l smu ai n
一阶倒立摆模糊控制实验报告

一阶倒立摆模糊控制实验报告本次实验旨在研究一阶倒立摆系统的模糊控制方法,通过对系统进行建模、设计控制器并进行仿真,最终评估控制效果。
实验过程主要包括系统建模、控制器设计、模糊控制器参数调节和性能评价四个步骤。
首先,我们对一阶倒立摆系统进行建模。
一阶倒立摆系统是一种具有非线性特性的控制系统,主要由电机、倒立摆、支撑杆等组成。
我们需要建立数学模型描述系统的动力学特性,包括倒立角度、倒立角速度、杆角度等状态变量,并考虑控制输入电压对系统的影响。
接着,我们设计模糊控制器。
模糊控制是一种基于模糊逻辑的控制方法,适用于非线性系统和模糊系统。
我们根据系统模型,设计模糊控制器的模糊规则、隶属函数等参数,以实现系统的稳定控制。
在设计过程中,我们需要考虑系统的性能指标,如超调量、稳态误差等。
第三步是模糊控制器参数调节。
通过仿真实验,我们可以对模糊控制器的参数进行调节,以使系统的性能达到最佳状态。
调节参数的过程需要考虑系统的稳定性、鲁棒性和响应速度,以达到控制效果的要求。
最后,我们对模糊控制系统进行性能评价。
通过对系统的响应曲线、稳定性、控制精度等指标进行分析,评价模糊控制器的控制效果。
我们可以比较模糊控制系统和传统控制系统的性能,探讨模糊控制在一阶倒立摆系统中的优势和局限性。
总的来说,本次实验通过研究一阶倒立摆系统的模糊控制方法,探讨了模糊控制在非线性系统中的应用。
通过实验,我们对模糊控制的基本原理和设计方法有了更深入的理解,同时也对一阶倒立摆系统的控制特性有了更清晰的认识。
希望通过实验的研究,能够为控制系统的设计和应用提供一定的参考和借鉴。
直线一级倒立摆的建模及性能分析

直线一级倒立摆的建模及性能分析1 直线一级倒立摆数学模型的建立 (1)2 直线一级倒立摆系统的实际模型 (5)3 直线一级倒立摆系统的性能分析 (6)相关理论的介绍 (6)倒立摆系统的性能分析 (7)1 直线一级倒立摆数学模型的建立所谓系统的数学模型,是指利用数学结构来反映实际系统内部之间、系统内部与外部某些主要相关因素之间的精确的定量表示。
数学模型是分析、设计、预测以及控制一个系统的理论基础。
因此,对于实际系统的数学模型的建立就显得尤为重要。
系统数学模型的构建可以分为两种:实验建模和机理建模。
实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励研究对像并通过传感器检测其可观测的输出,应用数学手段建立起系统的输入-输出关系。
机理建模就是在了解研究对象的运动规律的基础上,通过物理、化学的知识和数学手段建立起系统内部的输入-状态关系。
对于倒立摆系统,由于其本身是不稳定的系统,无法通过测量频率特性的方法获取其数学模型,实验建模存在一定的困难。
但是经过小心的假设忽略掉一些次要的因素后,倒立摆系统是一个典型的机电一体化系统,其机械部分遵守牛顿运动定律,其电子部分遵守电磁学的基本定律,因此可以通过机理建模得到系统较为精确的数学模型。
为了简单起见,在建模时忽略系统中的一些次要的难以建模的因素,例如空气阻力、伺服电机由于安装而产生的静摩擦力、系统连接处的松弛程度、摆杆连接处质量分布不均匀、传动皮带的弹性、传动齿轮的间隙等。
将小车抽象为质点,摆杆抽象为匀质刚体,摆杆绕转轴转动,这样就可以通过力学原理建立较为精确的数学模型。
我们可以应用牛顿力学的分析方法或者欧拉-拉格朗日原理建立系统的动力学模型。
对于直线一级倒立摆这样比较简单的系统,我们采用通俗易懂的牛顿力学分析法建模。
为了建立直线一级倒立摆的数学模型,采用如下的坐标系:图1直线一级倒立摆的物理模型其中,F 为加在小车上的力,M 为小车质量,m 为摆杆质量,I 为摆杆惯量, l 为摆杆转动轴心到杆质心的长度,x 为小车位移,φ为摆杆与垂直向上方向的夹角,b 为小车在滑轨上所受的摩擦力,N 和P 为摆杆相互作用力的水平和垂直方向的分量。
一阶直线倒立摆双闭环PID控制仿真报告

目录摘要 (2)一、一阶倒立摆系统建模 (3)1、对象模型 (3)2、电动机、驱动器及机械传动装置的模型 (4)二、双闭环PID控制器设计 (5)1、仿真验证 (6)2、内环控制器的设计 (9)3、系统外环控制器设计 (12)三、仿真实验 (15)1、绘图子程序 (15)2、仿真结果 (16)四、结论 (18)摘要本报告旨在借助Matlab 仿真软件,设计基于双闭环PID 控制的一阶倒立摆控制系统。
在如图0.1所示的“一阶倒立摆控制系统”中,通过检测小车的位置与摆杆的摆动角,来适当控制驱动电动机拖动力的大小,控制器由一台工业控制计算机(IPC )完成。
图0.1 一阶倒立摆控制系统分析工作原理,可以得出一阶倒立摆系统原理方框图:图0.2 一阶倒立摆控制系统动态结构图本报告将借助于“Simulink 封装技术——子系统”,在模型验证的基础上,采用双闭环PID 控制方案,实现倒立摆位置伺服控制的数字仿真实验。
一、一阶倒立摆系统建模1、对象模型如图1.1所示,设小车的质量为m 0,倒立摆均匀杆的质量为m ,摆长为2l ,摆的偏角为θ,小车的位移为x ,作用在小车上的水平方向的力为F ,O 1为摆角质心。
θxyOFF xF x F yF yllxO 1图1.1 一阶倒立摆的物理模型根据刚体绕定轴转动的动力学微分方程,转动惯量与角加速度乘积等于作用于刚体主动力对该轴力矩的代数和,则 1)摆杆绕其中心的转动方程为θθθcos sin y l F l F J x-= (1-1) 2)摆杆重心的水平运动可描述为)sin (22x θl x dtd m F += (1-2)3)摆杆重心在垂直方向上的运动可描述为)cos (22y θl dtd m mg F =- (1-3)4)小车水平方向上的运动可描述为220dtxd m F F x =- (1-4)由式(1-2)和式(1-4)得F ml x m m =⋅-⋅++)sin (cos )(20θθθθ (1-5) 由式(1-1)、(式1-2)和式(1-3)得θθθsin g cos 2ml x ml ml J =⋅++ )( (1-6) 整理式(1-5)和式(1-6),得⎪⎪⎩⎪⎪⎨⎧++-+-⋅+⋅=-++-⋅+++=))((cos sin )(cos sin cos cos ))((cos sin sin )()(x 2022202222220222222m l J m m l m m l m m l m F m l l m m m m l J g l m m l J lm F m l J θθθθθθθθθθθθ(1-7) 以上式1-7为一阶倒立摆精确模型。
一级倒立摆的可视化建模与稳定控制设计
1966年
1976年
1995年
倒立摆的应用
倒立摆的分类
直线倒立摆 一级倒立摆
基座运动
环形倒立摆
摆杆
二级倒立摆
平面倒立摆
多级倒立摆
另外根据材料分类:刚体摆杆倒立摆系统和柔性摆杆倒立摆系统 „„
根据不同的分类方法,我们可以将倒立摆进行不同的分类。
倒立摆的特点
特性:非线性、多变量、强耦合、不稳定性
倒立摆系统拥有低投入、简易的结构、直观 的形象、方便仿真等特点。
设计演示界面
保存文件,命名为 fangzhenjieguo.fig ,同时会自动生成一 个fangzhenjieguo.m 文件
将摆角、小车位 移和时间参量, 导入到工作区中 ,供GUI编程使 用。
打开之前保存演示界面是生成的fangzhenjieguo.m文件,找到 “仿真开始”按钮所对应的回调函数,在函数下方加入程序: sim('daolibaimoxing');%运行仿真模型
初始条件设为[0.1rad,0.5rad/s,0,0],仿真曲线如 图所示,上面图线为摆角,下面为小车位移。
右图为未加控制器前的系统 阶跃响应曲线,可以看出, 摆角和小车位移的曲线都是 发散的。通过与仿真结果比 较,可以看出,加了BP神经 网络控制器的倒立摆系统, 摆角和小车位移曲线趋于稳 定,说明所设计的BP神经网 络控制器能够起到有效的控 制作用。验证了控制器设计 的正确性和可行性。
四、GUI设计
图形用户界面(Graphical User Interface, 简称 GUI,又称图形用户接口)是指采用图形 方式显示的计算机操作用户界面。
GUI具有下面几个方面的基本要求:轻型、 占用资源少、高性能、高可靠性、便于移 植、可配置等特点。
基于Matlab的一级倒立摆模型的仿真
-s2 s4+-20 .58 s2 Transfer Fcn
Pulse Generator
由于未加进控制环节,故系统输出发散
2、加进控制环节,实现时域的稳定控制
0 Constant
-K Gain
1 Gain 1
1 s
Integrator
-40 Gain 3
du /dt Derivative
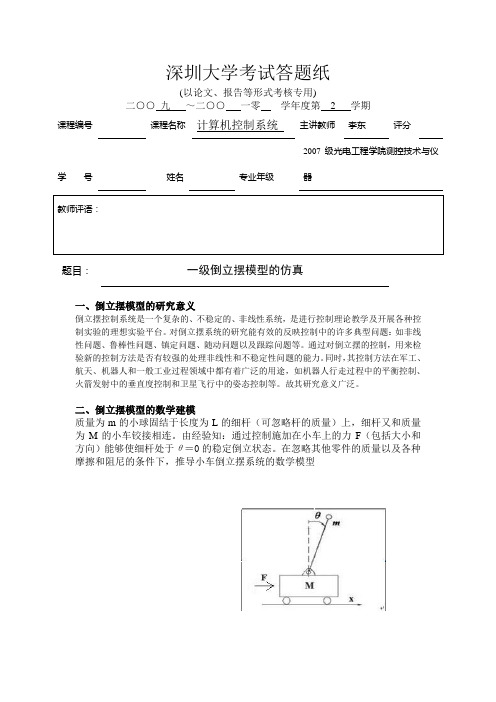
二、倒立摆模型的数学建模 质量为 m 的小球固结于长度为 L 的细杆(可忽略杆的质量)上,细杆又和质量 为 M 的小车铰接相连。由经验知:通过控制施加在小车上的力 F(包括大小和 方向)能够使细杆处于θ=0 的稳定倒立状态。在忽略其他零件的质量以及各种 摩擦和阻尼的条件下,推导小车倒立摆系统的数学模型
甲方(用人单位): 名称: 法定代表人: 地址: 经济类型: 联系电话:
乙方(职工): 姓名: 身份证号码: 现住址:
联系电话:
根据(中华人民共和国劳动法》和国家及省的有关规定,甲乙双方按照平等自愿、协商一致的原则订立
本合同。
一、合同期限
(一)合同期限
双方同意按以下第
种方式确定本合同期限:
1、有固定期限:从
(a)
=m(x’+lcosθθ’)’
= mx’’+mlcosθθ’’-mlsinθ(θ’)^2
(b)
由(a)、(b)两式得 F= (M+m)x’’ +mlcosθθ’’-mlsinθ(θ’)^2
<1>
小球垂直方向上位移为 lcosθ
故受力为
F’cosθ -mg=m(lcosθ)’’
=-mlθ’’sinθ-mlcosθ(θ’)^2
天,每周至少休息一天。 2、不定时工作制,即经劳动保障部门审批,乙方所在岗位实行不定时工作制。 3、综合计算工时工作制,即经劳动保障部门审批,乙方所在岗位实行以 为周期,总工时 小 时的综合计算工时工作制。 (二)甲方因生产(工作)需要,经与工会和乙方协商后可以延长工作时间。除(劳动法)第四十二条规定 的情形外,一般每日不得超过一小时,因特殊原因最长每日不得超过三小时,每月不得超过三十六小时。 四,工资待遇 (一)乙方正常工作时间的工资按下列第( )种形式执行,不得低于当地最低工资标准。 1、乙方试用期工资 元/月;试用期满工资
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一阶倒立摆系统建模与仿真研究一阶倒立摆系统是一种典型的非线性控制系统,具有多种状态和复杂的运动特性。
在实际生活中,倒立摆被广泛应用于许多领域,如机器人平衡控制、航空航天、制造业等。
因此,对一阶倒立摆系统进行建模与仿真研究具有重要的理论价值和实际意义。
ml''(t) + b*l'(t) + k*l(t) = F(t)其中,m为质量,b为阻尼系数,k为弹簧常数,l(t)为摆杆的位移,l'(t)为摆杆的加速度,l''(t)为摆杆的角加速度,F(t)为外界作用力。
在仿真过程中,需要设定摆杆的初始位置和速度。
一般而言,初始位置设为0,初始速度设为0。
边界条件则根据具体实验需求进行设定,如限制摆杆的最大位移、最大速度等。
利用MATLAB/Simulink等仿真软件进行建模和实验,可以方便地通过改变输入信号的参数(如力F)或系统参数(如质量m、阻尼系数b、弹簧常数k)来探究一阶倒立摆系统的性能和反应。
通过仿真实验,我们可以观察到一阶倒立摆系统在受到不同输入信号的作用下,会呈现出不同的运动规律。
在适当的输入信号作用下,摆杆能够达到稳定状态;而在某些特定的输入信号作用下,摆杆可能会出现共振现象。
在仿真过程中,我们可以发现一阶倒立摆系统具有一定的鲁棒性。
在一定范围内,即使输入信号发生变化或系统参数产生偏差,摆杆也能够保持稳定状态。
然而,当输入信号或系统参数超过一定范围时,摆杆可能会出现共振现象,导致系统失稳。
因此,在实际应用中,需要对输入信号和系统参数进行合理控制,以保证系统的稳定性。
为了避免共振现象的发生,可以通过优化系统参数或采用其他控制策略来实现。
例如,适当增加阻尼系数b能够减小系统的振荡幅度,有利于系统尽快达到稳定状态。
可以采用反馈控制策略,根据摆杆的实时运动状态调整输入信号,以抑制系统的共振响应。
本文对一阶倒立摆系统进行了建模与仿真研究,通过观察不同参数设置下的系统性能和反应,对其运动规律、鲁棒性及稳定性进行了分析。
探讨了避免共振现象的方法。
结果表明,一阶倒立摆系统具有较高的鲁棒性和稳定性,但在特定条件下仍可能出现共振现象。
为了提高系统的性能和稳定性,可以采取适当的参数优化和反馈控制策略。
一级倒立摆系统是一种典型的具有非线性、强耦合、多变量等特点的物理系统,其控制问题是一个具有挑战性的研究领域。
在本文中,我们将介绍一级倒立摆模糊PID控制器设计的方法和步骤,旨在提高控制系统的性能和稳定性。
一级倒立摆模糊PID控制器设计的主要思路是将传统的PID控制器与模糊逻辑控制器相结合,发挥两者的优势,以实现更好的控制效果。
PID控制器具有结构简单、易于实现等优点,但难以适应复杂多变的系统环境;而模糊逻辑控制器则能够较好地处理不确定性和非线性问题,提高控制系统的鲁棒性。
在具体实现中,我们需要根据一级倒立摆系统的特点进行参数计算和控制模型建立。
通过对倒立摆系统的数学建模,分析其动态特性和稳定性,为后续控制器的设计提供依据。
然后,根据模糊逻辑控制器的设计原理,建立相应的模糊规则和隶属度函数,通过模糊推理实现对倒立摆系统的有效控制。
我们需要对一级倒立摆系统进行数学建模,以便于后续控制器的设计。
常用的建模方法包括牛顿第二定律、动能定理等。
在建模过程中,我们需要考虑倒立摆的几何尺寸、质量、摩擦力等因素,以及它们之间的相互作用关系。
在建立控制模型后,需要对模型中的参数进行辨识,以便为后续的控制器设计提供准确的数据支持。
参数辨识的方法包括最小二乘法、梯度下降法等,具体选择哪种方法取决于实际应用场景和数据特点。
PID调节器是一种典型的线性控制器,具有简单易用、稳定性好等优点。
在倒立摆控制系统中,我们可以将PID调节器与模糊逻辑控制器相结合,以实现更好的控制效果。
具体来说,可以通过对PID调节器的参数进行优化,以使其能够适应不同的系统环境。
在完成PID调节器设计后,需要通过仿真测试来验证其有效性和可行性。
在仿真测试过程中,我们需要对控制器的参数进行不断优化,以获得更好的控制性能。
同时,还需要对控制器的鲁棒性和自适应性进行测试,以确保其能够在不同的系统环境下稳定运行。
为了验证一级倒立摆模糊PID控制器的有效性和可行性,我们进行了一系列实验。
实验结果表明,与传统的PID控制器相比,一级倒立摆模糊PID控制器在控制效果、稳定性和鲁棒性方面均表现出较好的性能。
同时,通过对比不同参数下的仿真结果,发现参数优化对于控制效果的影响非常大,因此在实际应用中需要对控制器参数进行精细调整。
本文主要介绍了一级倒立摆模糊PID控制器设计的方法和步骤,通过将传统的PID控制器与模糊逻辑控制器相结合,实现了对倒立摆系统的有效控制。
实验结果表明,该控制器在控制效果、稳定性和鲁棒性方面均优于传统PID控制器。
然而,在实验过程中也发现了一些问题和不足之处,例如参数优化尚需进一步完善,以及仿真环境与实际环境存在差异等。
展望未来,我们建议进一步研究以下方向:1)深入研究参数优化算法,提高控制器性能;2)加强与等领域的交叉研究,探索更为先进的控制方法;3)开展更多实际应用测试,验证控制器的实际效果。
一级倒立摆模糊PID控制器的研究对于提高倒立摆系统的控制精度和稳定性具有重要的理论和实践意义,有望在机器人、航天等领域发挥重要作用。
本文主要研究了在MATLAB环境下直线单级倒立摆系统的实时控制实验。
通过MATLAB的实时控制功能,实现了对倒立摆系统的稳定控制,并对其性能进行了分析。
实验结果表明,该实时控制方法能够有效地保持倒立摆的稳定状态,具有一定的应用价值。
关键词:直线单级倒立摆,实时控制,MATLAB直线单级倒立摆是一种常见的控制系统实验设备,其非线性、多变量、强耦合等特性使得其对实时控制算法的要求较高。
MATLAB是一种常用的数学计算和图形绘制软件,其强大的实时控制功能使得其在倒立摆实验中具有广泛的应用。
本文旨在探讨在MATLAB环境下直线单级倒立摆系统实时控制实验的研究与设计。
直线单级倒立摆系统由一个直线电机和一套支撑装置组成。
电机驱动摆杆在垂直平面内往复运动,保持倒立摆的稳定状态。
实时控制算法通过调整电机的输入电压或电流,改变摆杆的位置和速度,以实现对倒立摆系统的稳定控制。
实验中使用的材料和设备包括:直线电机、角度传感器、电荷放大器、数据采集卡、计算机(安装MATLAB软件)等。
实验采用的方法为:设计合适的实时控制算法,通过数据采集卡采集角度传感器的输出信号,计算摆杆的位置和速度,根据控制算法计算出电机的输入电压或电流,实现倒立摆的稳定控制。
搭建直线单级倒立摆系统实验平台,包括电机、角度传感器、支撑装置等;连接角度传感器和电荷放大器,通过数据采集卡将角度传感器的输出信号传输到计算机;在计算机上安装MATLAB软件,并编写实时控制程序;将电荷放大器的输出信号连接到计算机,通过MATLAB程序实现电荷放大器与电机之间的闭环控制;通过MATLAB程序实现对倒立摆系统的实时控制,调整电机的输入电压或电流,改变摆杆的位置和速度;记录实验数据,包括摆杆的位置、速度、控制输入等;通过实验,我们得到了以下数据(部分数据展示):分析实验数据可以发现,通过实时控制算法调整电机的输入电压或电流,可以有效地保持倒立摆的稳定状态。
在实验过程中,控制输入电压或电流的变化能够实现对摆杆位置和速度的精确控制。
在MATLAB环境下实现直线单级倒立摆系统的实时控制是可行的;通过调整电机的输入电压或电流,可以实现对摆杆位置和速度的有效控制;实验中使用的实时控制算法具有一定的鲁棒性和快速性,能够较好地适应倒立摆系统的时变性。
随着全球气候变化问题的日益严峻,碳减排和低碳发展已成为各行各业共同面对的挑战。
机械制造行业作为全球能源消耗和碳排放的重要源头,对其进行碳流动态建模对于减少碳排放、促进可持续发展具有重要意义。
本文旨在探讨一种基于扩展一阶混合Petri网的机械制造系统碳流动态建模方法,旨在为碳减排政策的制定和优化提供科学依据。
在过去的研究中,已有多位学者对机械制造系统碳流动态建模进行了探讨。
传统的碳流动态建模方法主要基于物质流分析(MFA)和能量流分析(EFA),但这些方法往往忽视了机械制造过程中不同环节之间的时序关系和并发性,无法准确地反映实际生产过程中的碳排放情况。
针对这一问题,一些学者开始引入 Petri网理论,通过对生产过程的建模与仿真,提高了碳流动态建模的精度。
然而,这些方法在处理实际生产过程中的复杂性和动态性方面仍存在一定局限。
本文所采用的基于扩展一阶混合 Petri网的机械制造系统碳流动态建模方法,结合了 Petri网的优点和一阶逻辑的表达能力强,能够更好地处理机械制造过程中的复杂性和动态性。
具体而言,该方法包括以下步骤:对机械制造系统进行全面的功能分析,明确各环节之间的逻辑关系和时序约束;利用 Petri网对机械制造系统进行形式化描述,建立相应的碳流动态模型;结合一阶逻辑对模型进行推演,实现对机械制造系统碳流动态的精确仿真;通过实际案例进行验证,分析模型的准确性和适用性。
以某机械制造企业为例,首先对其生产过程进行详细的功能分析,明确各功能之间的关系和时序约束。
然后,利用 Petri网建立相应的碳流动态模型,如图1所示。
该模型包括原材料库、生产车间、产成品库和废物库等四个部分,各部分之间通过变迁和库所进行连接。
在建立好模型后,我们采用一阶逻辑对模型进行推演,得到各库所中碳流的变化情况(如图2)。
从图2中可以看出,随着生产的进行,原材料库中的碳流逐渐减少,生产车间和产成品库中的碳流逐渐增加,而废物库中的碳流则呈先增加后减少的趋势。
这表明该机械制造企业的生产过程中存在一定的碳排放,且不同阶段的碳排放量具有明显差异。
本文提出的基于扩展一阶混合 Petri网的机械制造系统碳流动态建模方法,通过对机械制造系统的全面功能分析,建立相应的碳流动态模型,并采用一阶逻辑进行推演,成功地实现了对机械制造系统碳流动态的精确仿真。
通过实际案例验证,该方法能够准确地反映机械制造过程中的碳排放情况,为碳减排政策的制定和优化提供了科学依据。
未来研究可进一步拓展该方法的适用范围,将其应用于其他类型的制造系统,并考虑引入更多影响因素,如政策因素、技术因素等,以完善机械制造系统碳流动态模型。
还可结合其他先进理论和方法,如数据挖掘、机器学习等,以提高机械制造系统碳流动态建模的精度和效率。
基于扩展一阶混合 Petri网的机械制造系统碳流动态建模方法具有广泛的应用前景和重要的研究价值。