传递函数离散化之双线性转换
python 将传递函数转换为离散状态方程

python 将传递函数转换为离散状态方程摘要:1.引言2.离散状态方程的定义3.使用Python 将传递函数转换为离散状态方程4.总结正文:1.引言在控制理论和工程领域中,离散状态方程是描述系统动态特性的重要工具。
传递函数是连续系统的数学模型,然而在实际应用中,很多系统是离散的。
因此,将传递函数转换为离散状态方程对于分析和设计离散控制系统至关重要。
Python 作为一种流行的编程语言,可以方便地实现这一转换过程。
2.离散状态方程的定义离散状态方程描述了系统状态随时间变化的规律。
它通常包括一组状态变量和一组输入变量,以及状态转移方程和观测方程。
状态转移方程描述了系统状态如何随时间变化,观测方程描述了如何从系统输出中观测到状态信息。
离散状态方程可以表示为:x[k+1] = A * x[k] + B * u[k]y[k] = C * x[k] + D * u[k]其中x[k] 是状态向量,u[k] 是输入向量,y[k] 是输出向量,A、B、C、D 是系统矩阵。
3.使用Python 将传递函数转换为离散状态方程传递函数是连续系统的数学模型,通常表示为:G(s) = A / (s^n * (s^2 + 2 * s * z + z^2))其中s 是复变量,n 是系统的阶数,z 是系统的零点。
为了将传递函数转换为离散状态方程,我们需要计算系统的零点和极点。
Python 可以通过调用第三方库,如scipy.roots,来实现这一计算过程。
以下是一个Python 代码示例,演示如何将传递函数转换为离散状态方程:```pythonimport numpy as npfrom scipy.special import gammafrom scipy.roots import realdef convert_to_discrete_state_equation(G, dt):"""Convert a continuous-time transfer function G(s) to a discrete-time state equation.:param G: Transfer function:param dt: Time step:return: Discrete state equation"""# Calculate the poles and zeros of the transfer functionpoles, zeros = real(G)# Calculate the A, B, C, and D matricesn = len(poles)A = np.diag(poles)B = np.zeros((n, n))C = np.zeros((n, n))D = np.zeros((n, n))for i in range(n):B[i, i] = -poles[i]C[i, i] = 1D[i, i] = zeros[i]# Convert the state equation to a discrete form A_discrete = np.diag(np.exp(-poles * dt))B_discrete = np.zeros((n, n))C_discrete = np.zeros((n, n))D_discrete = np.zeros((n, n))for i in range(n):B_discrete[i, i] = -np.exp(-poles[i] * dt)C_discrete[i, i] = np.exp(-poles[i] * dt)D_discrete[i, i] = zeros[i]return A_discrete, B_discrete, C_discrete, D_discrete ```该函数接受传递函数G(s) 和时间步长dt 作为输入参数,并返回离散状态方程的系数矩阵。
阶跃响应不变法

阶跃响应不变法
阶跃响应不变法是数字信号处理中一种常用的数字滤波设计方法。
它基于连续时间系统与离散时间系统之间的映射关系,将连续时间系
统的单位阶跃响应映射为离散时间系统的单位脉冲响应。
具体来说,阶跃响应不变法的步骤如下:
首先,将连续时间系统的传递函数H(s)通过双线性变换映射到离散时间系统的传递函数H(z)。
这里,双线性变换的公式为:
z = (1 + Ts/2)/(1 - Ts/2) * e^(sT/2)
其中,T为采样时间,s为连续时间复频域变量,z为离散时间复频域变量。
接着,根据连续时间系统的传递函数H(s)计算出其单位阶跃响应
h(t)。
此时,可以利用拉普拉斯反变换,或者直接通过求导等方法获
得h(t)的表达式。
然后,将h(t)离散化,得到离散时间系统的单位脉冲响应h[n]。
这里,将h(t)按照采样时间等间隔离散化即可。
最后,得到离散时间系统的传递函数H(z)的表达式,即可进一步计算出离散时间系统的频率响应、幅频特性、群延迟等性质。
需要注意的是,阶跃响应不变法存在一定的失真,导致映射后离
散时间系统的频率响应与连续时间系统的频率响应有所不同。
特别地,对于高频系统,采用阶跃响应不变法设计的数字滤波器易产生不稳定
性和失真。
因此,在实际应用中需要慎重选择滤波器设计方法,结合
具体的应用要求进行选择。
计算机控制系统经典设计方法——模拟控制器的离散化方法
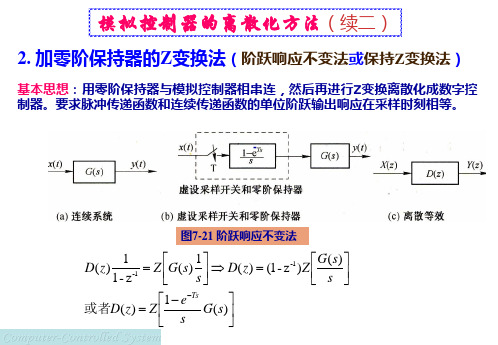
模拟控制器的离散化方法(续三)
例7.6 已知模拟控制器D(s)=a/(s+a),用保持Z变换法求 数字控制器D(z)。
【答案】
z-1 1 e aT) ( D( z ) aT 1 1 e z
u (k ) ?
D(s)稳定,D(z)稳定;
保持Z变换法特点
D(z)不能保持D(s)的脉冲响应和频率响应。
模拟控制器的离散化方法(续五)
一阶后向差分:
D( z ) D( s )
1 z 1 s T
U ( s) 1 D( s ) E ( s) s
u (kT ) u[(k 1)T ] Te(k )
一阶向后差分的s与z替换关系是 z变量与s变量关系的一种近似
图7-22 后向差分矩形积分法
模拟控制器的离散化方法(续八)
D(s)稳定,D(z)不一定稳定;若D(s)有离虚 轴较远的点,只有缩小采样周期T才有可能 稳定; D(z)不能保持D(s)的脉冲响应和频率响应。
前向差分变换法特点
图7-25 前向差分法的映射关系
模拟控制器的离散化方法(续九)
例7.7 已知模拟控制器D(s)=a/(s+a),用后向差分求数字控制器D(z)。
z e sT
K z ( z e z1T )(z e z2T )( z e zmT ) D( z )= ( z 1) nm ( z e p1T )(z e p2T )( z e pnT )
模拟控制器的离散化方法(续十三)
例7.9 已知模拟控制器D(s)=a/(s+a),用双线性变化法求数字控制器D(z)。 【答案】
【答案】
aT D( z ) 1 1 aT z
计算机仿真技术基础第4章 连续系统模型的离散化处理方法

第四章 连续系统模型的离散化处理方法
第一节 第二节 第三节 替换法 离散相似法 根匹配法
4.1
替换法
传递函数是控制系统应用最广泛的模型描述 形式,连续系统为S域的传递函数G(S),离散系 统为Z域的脉冲传递函数G(Z)。
替换法的基本思想:对给定的连续系统模型 G(S) ,设法找到S域到Z域的某种映射关系,将 S域的变量映射到Z平面上,由此得到与连续系 统G(S)相对应的离散系统的脉冲传递函数G(Z)。 然后,再由G(Z)通过Z反变换得到系统的时域离 散模型——差分方程,从而快速求解。
C C C D D C Z e T Z Y (Z ) A A A B B A U(Z ) Z e T
D C D C T Z e B A B A Z e T
Z反变换得差分方程:
y(n 1) e
计算机仿真技术基础
第四章
连续系统模型 的离散化处理方法
第三章的数值积分方法较成熟,计算精度高, 但算法复杂,计算量大。在一些要求速度较高的 实时仿真或计算机控制系统中实现数字控制器算 法,就跟不上速度的要求,就需要一些快速计算 方法。 本章介绍对连续系统模型进行离散化处理, 得到一个“等效”的结构比较简单的离散化模型, 便于计算机求解,运行速度较快,又称为“快速 计算方法”。 连续系统模型的离散化方法主要有替换法、 离散相似法和根匹配法。
2 1 S
TS 2TS 1 TS 1 2e e 2 STS
1Z
1 2 1
1 3 2 S TS
2 ( Z 1) TZ
2 1 2 1 T Z ( Z 1) 1 Z 3 T
一阶系统模型经欧拉变换与双线性变换的输出误差分析

Electronic Technology •电子技术Electronic Technology & Software Engineering 电子技术与软件工程• 77【关键词】欧拉变换 双线性变换 输出误差1 引言在数字技术发展迅猛的当今社会,通信过程中常常使用一系列的离散序列来传递信息。
欧拉变换和双线性变换公式可以根据泰勒级数的一次近似得到,两种变换给出了s 算子和z 算子之间的关系。
2 欧拉变换将作如下一次近似,或(1) 3 双线性变换(2)或(3)在进行模型转换时,可以直接使用以上的欧拉变换公式和双线性变换公式。
4 系统输出误差以一阶惯性系统为例,(4)假设系统的输入u(t)采用单位阶跃信号,系统输出响应Y (s)可表示为(5)对式(5)取拉普拉斯反变换,得到系统的时域输出为(6)式(6)经欧拉变换离散化后得(7)输出误差一阶系统模型经欧拉变换与双线性变换的输出误差分析文/杨丹 颜建美 吴冲(8)经双线性变换离散化后得(9)输出误差(10)例1. 考虑以下一阶系统模型(11)当系统输入为单位阶跃信号时,根据式(6)可知,系统的时域输出为(12)根据式(8)系统的输出误差为(13)根据式(10)可知系统的输出误差为 (14)当采样周期h=2取时,经欧拉变换和双线性变换离散化后的采样点处输出值y(k)与原连续曲线y(t)的关系如图1,系统的输出误差如表1。
5 结论采样周期取相同值时,连续输出曲线y(t)和经欧拉变换、双线性变换后的离散输出y(k)之间存在偏差。
经双线性变换后的输出更接近原连续输出。
参考文献[1]丁锋.系统辨识理论与方法+Matlab 仿真[M].北京:电力出版社,2011.[2]胡寿松.自动控制原理[M].北京:机械工业出版社,2008.[3]王治祥,丁锋.Z ―S 变换及其应用[J].控制与决策,1995,10(01):89-92.[4]丁志中.双线性变换法原理的解释[J].电子电气教学学报,2004,26(02):53-54.[5]方斌.控制系统中的双线性变换研究[J].电子科技大学学报,2002,31(02):192-195.[6]O m r a n H ,H e t e l L ,R i c h a r d J P.Stability analysis of bilinear systems under aperiodic sampled-d a t a c o n t r o l [J ].A u t o m a t i ca,2014,50(04):1288-1295.作者简介杨丹(1989-),女,江苏省常州市人。
6.3-双线性变换法

设计思想 设计方法 频率预畸变
典型例题1一Fra bibliotek设计思想1、脉冲响应不变法的主要缺点:对时域的采样会造成频域 的“混叠效应”,故有可能使所设计数字滤波器的频率响 应与原来模拟滤波器的频率响应相差很大,而且不能用来 设计高通和带阻滤波器。
原因:从S平面到Z平面的映射是多值映射关系
,
二、“双线性变换法”设计方法
① 通过正切变换: 将S平面的jΩ轴压缩到S1平面的jΩ1轴上的 ② 通过Z变换: 内。
将Ω 1映射到Z平面的单位圆上。
③ 将正切变换延拓到整个S平面,得到S平面到S1平面 的映射关系:
4
④ 将S1平面按 z
e
s1T
映射到Z平面得到:
2 1 z s T 1 z 1
1
或
2 s z T 2 s T
5
三、双线性变换的频率对应关系 双线性变换法虽然避免了“频率混叠效应”,但出现了 模拟频率与数字频率为一种非线性的关系情形。即: 可见:模拟滤波器与数字滤波器的响应在对应的频率关 系上发生了“畸变”,也造成了相位的非线性变化,这
2 tg ( ) T 2
频率预畸变;然后将预畸变后的频率代入归一化低通原 型Ha(s) 确定 函数: ;最后求得数字系统
7
脉冲响应不变法的映射过程图示
2
2、双线性变换法的改进: 为避免频率的“混叠效应” ,分两步完成S平面到Z平面 的映射。
, ; ① 将S平面压缩到某一中介的S1平面的一条横带域 T T ② 通过标准的变换将此横带域映射到整个Z平面上去。
双线性变换的映射过程图示
3
3、双线性变换法的基本思路: 从频率响应出发,直接使数字滤波器的频率响应 逼近模拟滤波器的频率响应 ,进而求得H(z)。
双线性变换法

H
1 a
(s)
s3
1 2s2
2s
1
Ha
(s)
(s
/
c
)3
2(s
/
1 c
)2
2(s
/
c
)
1
又s
z2
2z cos0
z2 1
1
H
(z)
Ha (s)
s
z
2
2
z cos z 2 1
0
1
习题3.12
cos( c wc )
解:
cos( c
2 wc
)
2
c 2fc , wc 2fc / f s
u 1
z 1 1 z 1
抽样周期 T 2,试用双线性变换法将它转变
为数字系统函数 H z
解:由变换公式
s
c
1 1
z 1 z 1
及
c
2 ,T
T
2,可得
s
1 1
z 1 z 1
H
z
Ha
s
s
1 1
z z
1 1
1
1
z 1 z 1
2
1
1 1
z 1 z 1
1
1 z 1 2 3 z2
习题3.6
c
cT
阶巴特沃思数字低通滤波器,边界频率fc 1kHz
解:A2 () H ( j) 2
1
1 ( j )2*3
j1
H
a
(
s)
H
a
(
s)
1
1 s
6
其极点为Sk
j 1 2k 1
e 2 6 ,k
1,2,....6
第六章 数字控制器的模拟设计法

控制系统的主要设计任务之一。
间接设计法—模拟化设计法 经典法 数字控制器 的设计方法 直接设计法—数字化设计法 状态空间设计法
中南大学机电工程学院
计算机控制系统
●
第六章 计算机控制系统的模拟化设计
模拟化设计法 数字控制器的模拟化设计法就是先将计算机控制
系统看作模拟系统(如图6.1-2所示),针对该模拟
计算机控制系统 分析与设计
控制原理
中 南 大 学 机 电 工 程 学 院
2011年10月
计算机控制系统
第六章 计算机控制系统的模拟化设计
第6章 计算机控制系统的 模拟化设计
本章主要教学内容 1. 设计方法概述
2. 传递函数与Z传递函数的相互转换
3. 数字PID调节器的设计
中南大学机电工程学院
计算机控制系统
化方法将其离散为数字控制器,即转换成图6.1-3
所示的计算机控制系统。
HG(z)
R (s ) r (t )
T
D(z )
T
H 0 ( s)
G (s )
Y (z ) Y (s )
图6.1-3 离散闭环控制系统
由于人们对于连续控制系统的设计方法(如频率法、
根轨迹法等)比较熟悉,从而应用模拟方法设计数字 控制器比较易于接受和掌握。但是这种方法并不是按
第六章 计算机控制系统的模拟化设计
控制算法:
u (kT) e aT u (kT T ) (1 e aT )e(kT T )
零阶保持器法的特点: (1)若D(s)稳定,则D(z)也稳定; (2)D(z)不能保持D(s)的脉冲响应和频率响应。
6.2.4 零极点匹配法
基本思想:S域中零极点的分布直接决定了系统的