定向井随钻测量误差模型及误差源分析(2)
钻井测斜仪的误差分析

文章编号 :100320794 (2003) 0820041203
钻井测斜仪的误差分析
乔红兵1 , 郭继坤1 ,2 (11 中国矿业大学 机电学院 北京校区 , 北京 100083 ; 21 黑龙江科技学院 , 黑龙江 鸡西 158105)
文献标识码 : B
1 设想的提出 采煤机底托架尺寸较大 ,又很重 ,属大型零件 ,
加工比较困难 ,尤其是端面加工 。目前 ,煤机厂没有 相应的专用设备来加工其端面 ,只能利用镗床单刀 头加工端面 ,不但效率低 ,质量也难保证 ,而且还增 加了镗床的负荷 ,降低设备精度 ,浪费设备资源 。根 据这一情况 ,设想为加工采煤机底托架端面设计一 台专用设备 。此设备的出现 ,不仅能提高产品质量 ,
误差 。最直接的误差补偿方法就是获得若干组加速 计和磁通门的实际输出值和理想输出值 ,直接建立 起矩阵方程 ,通过求解矩阵方程获得两矩阵的各项 元素的值 。数字滤波技术主要有以下几种方法 :
(1) 限幅滤波 这种滤波是用数据比较的方法 来判断数据的真实程度的 ,它的基本思想是将 2 次 相邻采样数据之差与被测数据的允许偏差进行比 较 ,若小于则录用本次测量结果 ,若大于则舍去被测 量结果 ,即
式中 Yi ———本次采样结果 ; Xi - 1 ———上次采样结果的录用值 ; Xi ———本次采样的结果录用值 ; b ———滤波系数 ,与数字滤波的截止频率 f s 和采样计算周期Δt 有关 。
除上述 2 种方法外 ,还有算术平均滤波 、中值滤 波和加权滤波 , 从原理上讲均具有一定的可行
磁性测斜仪一般采用三轴加速度计和 3 个磁通 门构成井下传感器 。加速度计用于感知井斜信息 , 磁通门用于感知方位信息 。井下多个传感器信号在 时序电路控制下经多路开关切换至 AΠD 变换器 ,转 换出的数字信号按照 PC 机串行通信格式经 FSK(频 率键控) 调制器及电缆驱动器送上电缆 。井上设备 从电缆接受 FSK调制信号并进行调解 ,调节后的信 号送到 PC 机的串行口 ,PC 机根据数学模型计算出 井斜角和方位角等信息 ,并描绘井眼轨迹曲线 ,其原
定向钻井技术中的常见问题及对策分析
定向钻井技术中的常见问题及对策分析摘要:定向井钻井工艺技术在很多行业有着不同程度应用,特别是石油行业,应用定向钻井技术可以钻出不同方向与不同倾斜度,有着非常好的灵活性,确保油井得到更大程度开采。
当前要进一步提高定向井施工质量,为挖井工程提供更高水平技术支持,保证工程精确度、提高钻井效率,需要对定向井钻井工艺技术进行全面的、更高程度的优化,在原有基础上进一步发展,实现高效率油气开采。
关键词:定向钻井技术;常见问题;对策1定向钻井技术发展1.1第一代定向钻井技术第一代钻井技术分为被动定向技术和主动定向技术。
被动定向技术:井眼轨迹处于地层的自然挠度中,钻柱屈曲和钻头情况会影响井眼轨迹,但井眼轨迹无法得到精确控制。
主动定向技术:利用一些特殊的设备、工具和技术措施来主动控制井眼轨迹,主要方法是通过改变钻具组合和使用造斜器来改变工具轴与井眼轴的偏离程度。
钻具组合可分为造斜、降斜和刚性钻具组合,通过改变钻具组合可以帮助井眼清洁、减小钻柱阻力、减小狗腿角、节约钻井成本,但这种方法对方位的控制能力不足。
早期的造斜器是一种专用工具,主要用于引导钻头偏离井眼轴线及设定所需方向,造斜器可以控制方位角,解决了钻具组合控制能力不足的问题,但其也有很多缺点:需要多次起下钻、浪费时间、操作复杂、准确度差等。
但在超高温深井钻井,因为井下动力钻具因高温失效时,造斜器仍是一种有效的替代办法。
1.2第二代定向钻井技术第二代定向技术以涡轮钻具、螺杆钻具及测斜仪等工具的发明和使用为代表。
螺杆钻具和涡轮钻具通过钻井液的动能配合其他工具(弯钻杆、弯接头、偏心接头等)来达到改变井眼轨迹的效果。
主要的监测工具是测斜仪。
与第一代定向钻井技术相比,第二代技术的井眼轨迹更为平滑和准确,钻速也大幅度提高。
1.3第三代定向钻井技术第三代定向钻井技术是更为先进的监控和钻进工具发展的结果。
主要特征是随钻测量工具(MWD)的出现,进一步提高了控制的精度,可以随钻进行定向操作。
江苏油田定向井轨迹测量误差因素浅析

摘
要: 定向 井施工过程 中, 测斜 出现的误差可能导致计算 出的井眼轨迹与 实钻轨迹 出现较 大偏
差。通过对影响轨迹测量误差的因素进行分析 , - . ̄有效降低江苏油田老 区井眼防碰 的风险 , f - 也可
以提 高水平 井 、 大位移 井等 特 殊工 艺 井的 中靶 精 度 。
关键 词 : 江 苏油 田 ; 定 向井 ; 测 量误 差
表 2 江苏油田部分区块 磁偏角、 子 午线收敛 角取值表
从表 1 可 以看 出, 虽然各类测斜仪器之间的测量精 度差别较大 , 但是井斜角 的测量精 度却 比方位角 的测 量精度高很多。以P — MWD型号的无线随钻测斜仪为 例计算可能产生 的最大误差 , 方位误 差△ = ±1 . 5 。 , 井
收 稿 日期 : 2 0 1 3 - 0 6 — 2 ) , 男( 汉族 ) , 江苏扬州人 , 助理工程师 , 现从事钻井工艺研究 工作 。
西部探矿工程
2 0 1 4 年第 4 期
方 位角 归化 公式 为 :
: - 十 一y[ ]
和校验 , 否则仪器 的系统误差也 会影 响到测量精 度 。
1 . 2 方位 角归 化 的影响
体列举 了江苏油田常用的 3 种无线随钻测斜仪型号。
表 1 江苏油 田常用测斜 仪器 的测 量精 度
定 向井 的井 口和 靶点 都是 用 高斯 投 影 坐标 来表 示
的, 所 以用于轨迹计算 的方位角必须 以网格坐标为参 照 。在使用 电子单多点 、 无线 随钻磁性测斜仪测量数 据时 , 需要对磁偏角和子午线收敛角进行校正 , 对方位 角进行归化处理 , 表2 列举 了江苏油 田部分 区块磁偏 角、 子午线收敛角计算取值。
定向井随钻测量误差模型及误差源分析
定向井随钻测量误差模型及误差源分析摘要:介绍了测量误差模型的发展,Williamson 等人提出的MWD误差新模型,及新模型存在的误差源分析。
主题词:MWD误差模型误差源分析测量误差的最初模型是由Warlstrom.在60年代末70年代初提出的,是在假设测量过程测点间的误差是随机的基础上,引入了误差椭圆来描述井眼的不确定性,该模型的误差预测值比实际的小,原因主要是采用了原始状态的统计误差模型。
沃尔夫和瓦德在假设误差是随机的的基础上,引入了系统误差,精度要高得多。
1981年瓦伦对测量误差作了细致的分析,证实了系统误差和随机误差的存在,且位置的系统误差比随机误差要大。
在沃尔夫和瓦德时代普遍使用的测量仪器为照相仪器,随着先进的测量工具出现和普及使用,小靶区及井距的加密,防碰及中靶的风险,要求井眼位置不确定性降到最小,原有的误差模型已无法满足要求。
在这种情况下,Williamson 等人提出了一种预测MWD误差新模型。
一、定向井随钻测量误差新模型的建立定向井随钻测量误差新模型是在以下假设条件下建立的:·计算井眼位置误差是由井眼测点的测量误差唯一确定;·井眼测点可分成三个基本测量向量:井深H,井斜α,方位φ;·来自不同误差源的误差在统计学上是相互独立的;·每个测量误差及计算井眼位置的相应变动之间存在线性关系;·在任一测点上的测量误差对计算井眼位置的合成效果等于单个误差的矢量总和。
二、定向井随钻测量误差新模型误差源分析误差源是工具在测量过程中产生误差的一种物理现象。
误差项是特定测量工具测量时对误差源的描述。
误差模型是由一系列误差项组成的,误差项的选择标准是能准确反映测量工具或系统的所有重要误差源。
误差传播方式有四种,即随机(Random)、系统(Systematic)、逐井(Well by well)、全球(Global)。
1、传感器误差传感器误差可归结于刻度误差和两个正交的非线性误差,三个误差相互独立且具有类似的量值,三个误差项合成一个偏差项,该偏差项应加入到已有的偏差项中作为一个合成误差。
介绍一种定向井MWD仪器误差分析模型

介绍一种定向井MWD仪器误差分析模型作者:张楠张鹏宇张昊宋晓健来源:《石油研究》2019年第11期摘要:Warlstrom.在60年代末70年代初提出的定向井随钻测量误差模型是在假设测量过程测点间的误差是随机的基础上,引入了误差椭圆来描述井眼的不确定性,该模型的误差预测值比实际的小,原因主要是采用了原始状态的统计误差模型。
沃尔夫和瓦德在假设误差是随机的的基础上,引入了系统误差,精度要高得多。
1981年瓦伦对测量误差作了细致的分析,证实了系统误差和随机误差的存在,且位置的系统误差比随机误差要大。
在沃尔夫和瓦德时代普遍使用的测量仪器为照相仪器,随着先进的测量工具出现和普及使用,小靶区及井距的加密,防碰及中靶的风险,要求井眼位置不确定性降到最小,原有的误差模型已无法满足要求。
在这种情况下,Williamson 等人提出了一种预测MWD误差的新模型。
关键词:定向井;MWD误差模型;误差分析一、定向井MWD测量误差新模型的建立定向井MWD测量误差新模型是在以下假设条件下建立的:1、计算井眼位置误差是由井眼测点的测量误差唯一确定;2、井眼测点可分成三个基本测量向量:井深H,井斜α,方位φ;3、来自不同误差源的误差在统计学上是相互独立的;4、每个测量误差及计算井眼位置的相应变动之间存在线性关系;5、在任一测点上的测量误差对计算井眼位置的合成效果等于单个误差的矢量总和。
二、定向井MWD测量误差新模型误差源分析误差源是工具在测量过程中产生误差的一种物理现象。
误差项是特定测量工具测量时对误差源的描述。
误差模型是由一系列误差项组成的,误差项的选择标准是能准确反映测量工具或系统的所有重要误差源。
误差传播方式有四种,即随机(Random)、系统(Systematic)、逐井(Well by well)、全球(Global)。
1、传感器误差传感器误差可归结于刻度误差和两个正交的非线性误差,三个误差相互独立且具有类似的量值,三个误差项合成一个偏差项,该偏差项应加入到已有的偏差项中作为一个合成误差。
水平定向钻进的轨迹误差分析与优化
测距为 LC 每个钻
。
,,
E(X)
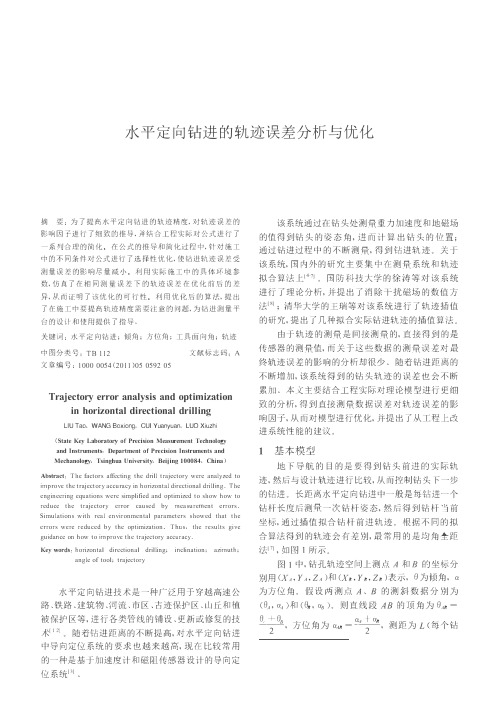
oXYZ,如图2所示。其中,N、D轴分别指向地磁 北极和重力方向, Z轴沿钻具轴线指向钻头前进方 向,X轴位于钻具横截面内指向钻头造斜方向,Y 轴与X、Z轴垂直 并构成右手正交坐标系。此时, 倾角为Z轴与竖直方向之间 的夹角,用。表示;方 位角为Z轴在水平面的投影Z f 与 正北方向之间的 夹角,用α 表示;工具面向角为X轴方向与OD-oZ 平面 的 夹角, 用+表 示。角度 的 方 向都是按照 oXYZ坐标系右手系的方向为正l 9-IOJ 。
,,
,
B D(η
图1
均角全距法计算示意图
杆长度)。这个测段内的 基本参数可表示为 αAB, Xs= XA LcosBAs sin
+
N
BAs, Ys= YA十Lsin Zs= ZA +LcosBAscosαAB •
(1)
E
式(1)利用 了两测点问测段为直线且直线方向 以前后测点的平均方向为基准的假设,根据 这些要 素,可以逐点计算出轨迹上任 一点的空间坐标。工 程中多是通过三轴 的加速度计和磁场传感器分别测 量 重力场和地磁场,然后在建立 的参考坐标系和仪 器坐标系 (即传感器 的坐标系) 中通过坐标变换得到 公式 中各姿态角的值。 首先建立参考坐标系OEDN和 钻具坐标系 cosαsin 1>+ sin αsin Bcos 'P C
1
基本模型
地下导航的目的是要得到钻头前进的实际轨
迹,然后与设计轨迹进行比较,从而控制钻头下一 步 的钻进。 长距离水平定向钻进中 一 般是每钻进一个 钻杆长度后测量 一 次钻杆姿态,然后得到钻杆当前 坐标,通过插值拟合钻杆前进轨迹。 根据不同的拟 合算法得到的轨迹会有差别,最常用的是均角全距 法l 7J ,如图 1 所示 。
定向井钻井技术常见问题及处理对策
定向井钻井技术常见问题及处理对策定向井钻井技术是石油勘探和开发中的重要技术手段,其主要通过控制钻井工具的运动轨迹,实现对目标地层的有效钻探。
由于复杂的地质条件和工程技术要求,定向井钻井技术中常常出现各种问题,严重影响钻井作业的进展。
针对定向井钻井技术常见问题,制定有效的处理对策显得极为重要。
一、常见问题及处理对策1. 钻井工具偏离设计轨迹当钻井工具偏离设计轨迹时,会导致目标地层探测失败,严重影响钻井效率。
出现这一问题的主要原因包括地质条件复杂、井眼钻斜控制不够精准、井下测量数据不准确等。
针对这一问题,需要采取以下对策:(1)加强地质条件的分析和预测,调整钻井方案,合理选择井眼位置和方向。
(2)严格控制井眼钻斜角度和方向,采用精准的定位技术和测井工具,及时调整钻井方向。
(3)加强井下测量数据的监测和校正,确保勘探数据的准确性和可靠性。
2. 钻井工具卡钻钻井工具卡钻是定向井钻井技术中的常见问题,一旦发生会导致钻井作业中断和工程设备损坏,造成重大经济损失。
卡钻的原因很多,如井眼附近地层发生坍塌、钻井流体黏度过大、井底流通受阻等。
为应对这一问题,需采取以下措施:(2)合理设计和使用钻井流体,确保流体的黏度和流通性。
(3)及时处理井底流通受阻问题,保障钻井工具的安全运转。
3. 井眼大小不符合设计要求定向井钻井技术中,井眼大小不符合设计要求是一个常见问题,一旦出现会造成油气漏失和井壁稳定性问题。
井眼大小不符合设计要求的原因可能是钻进参数设置错误、井眼控制不当等。
为应对这一问题,需采取以下措施:(1)加强井眼测量和监测,确保实时掌握井眼大小情况,及时调整钻井参数。
(2)合理设置钻进参数,保证井眼尺寸符合设计要求。
(3)加强井眼稳定性的监测和控制,及时采取加固井壁的措施。
4. 钻井液密度不稳定钻井液密度不稳定会导致井壁稳定性差,井内压力不稳定等问题,严重影响钻井作业的安全和进展。
出现这一问题可能是因为井底地层压力异常、钻井流体配方不当等。
定向钻井过程中不同测量间距导致的轨迹误差-天然气工业
定向钻井工艺是根据相关井眼轨迹的设计要求 , 通过相应测量仪器的测量得到已钻井眼轨迹的相关参 数 ,控制待钻井眼轨迹的变化 ,使得待钻井眼轨迹能够 按照设计准确中靶的同时又能有效避开邻井的一种钻 井工艺 。 已钻井眼轨迹参数是否准确 ,不仅是控制待 钻井眼轨迹施工的关键 ,同时关乎可否避开邻井 、能不 能中靶 ,而且还关乎后期的下套管 、注水泥以及后期的 井下作业 ,因此利用实测井眼轨迹参数通过测斜计算 方法对待钻井眼轨道进行精确拟合对井身质量起到至 关重要的作用[1] 。 井眼轨迹测量和测斜计算方法是实 现井眼轨迹精确拟合的关键 ,但是这两个过程中不可 避免地存在着误差 ,误差的积累与放大 ,轻者导致脱 靶 ,严重的会使井眼交碰导致两井作废而无法达到预 期的目的[2‐6] 。 认识误差产生的原因并采取措施减小 误差成为实现井眼轨迹精确拟合的重要任务 。 本文在 现有测斜计算方法的基础上分析了不同测量间距及测
计算方法阐述测量间距和测量初始位置的选择对井眼 轨迹拟合精度的影响 。
2 测量间距及测量初始位置选择引起 的误差
现在常用的定向方法是采用钻头 + 单弯螺杆 + 直 接头 + 无磁钻铤的钻具组合一次性实现造斜 、稳斜施 工 ,在 28 ~ 30 m 的测段内可以实现滑动钻进与复合 钻进的多次转变 ,从而使得井眼轨迹更加复杂 ,因此根 据已测井眼轨迹参数对待钻井眼轨迹进行拟合计算 时 ;测量间距的大小 、测量初始位置选择的差异将直接 影响到测量结果的精度 。 2 .1 不同测量间距引起的误差 河 X‐斜 Y 井是胜利油田钻成的一口井斜达到 61 .16°的大位移井 。 其轨道类型为直 — 增 — 稳 ;井底 设计垂深为 1 440 .00 m ;井底闭合距为 1 751 .07 m ; 井底闭合方位为316 .97° ;造斜点井深为 250 .00 m ;最 大井斜角为61 .16° ;靶点垂深为 1 410 .00 m ;闭合距为 1 696 .59 m ;靶半径为 20 .00 m 。 轨迹设计及轨迹参 数如表 2 所示 。 在井眼轨迹控制施工过程中 ,为了有效地调整轨 迹参数 ,需要选取比设计造斜率稍大的单弯螺杆钻具 , 这样可以更加主动地应对实际钻进过程中遇到的问 题 ,以便调整轨迹参数使测段内实际造斜率与理论造 斜率接近 ,使实钻井眼轨迹按照预先设计的轨迹行 进[8] 。 理论造斜率与设计造斜率的关系为 :Kc = K /a 。 式中 Kc 为理论造斜率 ;K 为设计造斜率 ;a 为经验系
确定以定向方式所钻油井的定位误差
确定以定向方式所钻油井的定位误差白岩译张跃军校摘要:根据一项正在进行的连续测量工业研究成果与定点测量结果对比,在过去的15年里,所钻的水平井有一半以上计算的井位可能存在误差。
在一口典型的水平井中,能够累计的定位误差为±25英尺(±7.62米)真垂深。
研究发现几项通常允许的定向钻井和井眼测量活动是造成这些误差的主要原因。
主题词:定向井误差定位定向井测量工业已经采用了最小曲率方法作为计算井位的标准方法,它通过固定的井斜角和方位角测量,并且测量的间距从30英尺(9.14米)蠕升到90英尺(27.43米)。
在最小曲率方法假设中,测量点之间存在一个恒定的径向弧曲率。
在较短时间内大大盛行连续定向研究以及倾斜角测量法,人们已经发现了许多恒定的径向弧假设无效的实例,并且在每个实例中导致了很小的定位误差。
在钻至总深的途中,当存在系统的多次定位误差时,就会导致重大的总体误差。
钻井期间,累计的较大定位误差能够导致较差的以及高成本的地质导向决策,最终导致布井不良、无计划侧钻并且储量采收率较低。
这类误差对一个作业公司最大的影响可能是增加误差,或者使每口油井的预定可采储量减掉几十万桶。
人们已经对导致相对长的间隔段(27.43米的测量段)之间出现曲率不恒定的4个原因进行了鉴定。
它们与定向钻井的机械方位有直接关系。
减少累计误差数量简单短期的解决方案就是进行更多的测量,尽管这样做将增加项目成本。
另一种长期的解决方案正在开发当中,它将允许使用连续定向和井斜角测量,实时监控方位趋势和井位。
这三个系列步骤包括:²第一步:当使用一部常规导向容积式马达系统钻井时,检查误差出现在水平井的什么位置以及发生的频率怎样?²第二步:2003年11月3日,当使用旋转导向系统和(或)遇到岩性学改变时,检查类似的误差。
²第三步:一套建议和技术能够有助于减少此类问题。
问题说明从井斜角和方位角测量结果入手,通过确定两个测量点之间最小的曲率半径,最小曲率的方法已经作为计算井位的标准方法长期使用。
随钻中子测井数据校正分析
随钻中子测井数据校正分析随钻中子测井是一种用于测量井内地层中子辐射强度的技术。
中子测井数据对于地层的分析和评价具有重要的意义,但是在测井数据处理中,由于某些原因可能存在一定的误差。
进行中子测井数据的校正分析十分必要。
以下将就随钻中子测井数据校正分析的方法和重要性进行详细介绍。
一、误差来源及影响分析1. 自然伽马辐射的干扰在中子测井中,自然伽马辐射是一个潜在的干扰因素。
地层中存在的天然放射性元素(如钍和钾)会产生伽马辐射,并且与中子源产生的中子辐射混合在一起,造成中子探测器接收到的混合辐射信号。
这种干扰可能导致中子测井数据的偏差。
2. 仪器本身误差随钻中子测井仪器本身存在一定的测量误差,可能会影响到中子测井数据的准确性。
3. 地层含水量变化地层中的水含量变化也会影响到中子测井数据的准确性。
特别是在水含量较高的地层中,中子测井数据的解释需要进行相应的校正。
误差来源及其影响分析可以帮助我们更好地理解中子测井数据的准确性和局限性,有助于进一步进行数据的校正分析。
二、随钻中子测井数据校正方法1. 自然伽马辐射的校正为了排除自然伽马辐射的干扰,可以采用反演方法进行校正。
通过对中子和伽马辐射进行分离,得到纯的中子辐射信号,从而减少自然辐射的影响。
也可以通过专门的校正曲线进行自然伽马辐射的校正。
2. 仪器误差的校正针对仪器本身的误差,可以通过定期的校准和调试来保证测量的准确性。
对于已有的中子测井数据,也可以采用仪器响应函数的纠正方法来进行数据校正。
3. 地层含水量的校正针对地层含水量变化所引起的影响,可以采用地层声波测井等方法来获取地层的含水量信息,然后对中子测井数据进行相应的校正。
也可以通过实验室测试获取地层样品,对中子测井数据进行验证和校正。
三、中子测井数据校正分析的重要性1. 优化地层解释中子测井数据校正分析可以帮助我们排除干扰因素,使得我们能够更准确地获取地层的有关信息。
通过有效的校正分析,可以优化地层解释,更好地进行储层评价和地质分析。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
定向井随钻测量误差模型及误差源分析狄敏燕卢春阳摘要:介绍了测量误差模型的发展,Williamson 等人提出的MWD误差新模型,及新模型存在的误差源分析。
主题词:MWD误差模型误差源分析测量误差的最初模型于60年代末70年代初由Warlstrom.提出,是在假设测量过程测点间的误差是随机的基础上,引入了误差椭圆来描述井眼的不确定性,由此而来的误差预测值比实际上的小,原因主要是采用了原始状态的统计误差模型。
沃尔夫和瓦德在假设误差是随机的的基础上,引入了系统误差,精度要高得多。
1981年瓦伦从实际井对测量误差作了细致的分析,证实了系统误差和随机误差的存在,且位置的系统误差比随机误差要大。
在沃尔夫和瓦德时代,当时普遍使用的仪器为照相工艺的仪器,包括非惯性连续测量传感器。
随着更先进的测量工具出现和普及使用,原有的误差模型已不能满足要求。
随老区不断地部署新井,小靶区及井距的加密这两方面的问题使量化井眼位置误差显得尤为重要。
防碰及中靶的风险要求井眼位置不确定性降到最小,而沃尔夫和德·瓦特误差模型未提及,己无法满足要求。
在这种情况下,Williamson 等人提出了一种预测MWD误差新模型。
该误差模型采用以下假设,但对测量误差统计概率未作任何限制性假设。
·计算井眼位置误差是由井眼测点存在的测量误差唯一确定;·井眼测点可分成三个基本测量向量,包括井深D,井斜I,方位A。
对每个测点,误差传播数学公式还需用到工具面角α;·来自不同误差源的误差在统计学上是相互独立的;·每个测量误差及计算井眼位置的相应变动之间存在线形关系;·在任一测点上的测量误差对计算井眼位置的合成效果等于单个误差的矢量总和。
误差源是工具在测量过程中产生误差的一种物理现象。
误差项是特定测量工具测量时对误差源的描述。
加权函数描述了工具测量向量上的误差结果,每个加权函数最多由四个有代表性意义的字母组成;如ABX(Accelerometer Biases X)表示X向加速度偏差误差模型是由一系列误差项组成,误差项的选择准则是能准确反映测量工具或系统的所有重要误差源。
误差传播方式有四种,即随机(Random)、系统(Systematic)、逐井(Well by well)、全球(Global)。
传感器误差。
传感器误差可归结于刻度误差和两个正交的非线性误差,三个误差相互独立且具有类似的量值,三个误差项合成一个偏差项。
该偏差项无须在误差模型中明确表达,但必须加入到已有的偏差项中作为一个合成误差,这就无须用和传感器非线性误差有关的20个加权函数来表达。
传感器非线性误差比刻度误差小得多,为提高精度可以这样处理:部分刻度误差随非线性误差形成偏差项,余下的刻度误差单独列为一项。
因此,每个传感器的四个物理误差转化为两个基本项,结果如下:BHA磁性干扰。
磁干扰是由BHA产生的,可分成作用在井眼轴线的平行向(轴向)和圆周向(法向)的两个分量。
轴向干扰。
用不同的磁极强度仪器测得的磁极强度均方根值如下:Oddvar Lotsberg得出41种钻具组合的磁极强度,其均方根为369μWb。
对钻具磁化产生的误差影响,沃尔夫和德·瓦特文中提出用非磁钻铤选择大表,但其来历和局限性却无据可查。
上述结果表明:当手头资料缺乏时,对钻柱钢体部分其磁极强度估计值为400μWb 比较合理。
这值对井下BHA设计非常有用,但在手头缺乏非磁间距值时无法用于预测位置的不确定性。
而非磁间距长度问题在工业上并无标准可用,因而必须寻找估计该误差值的其他途径。
一个工业上已认可的做法是:对假设的磁极强度和给定的井眼方向,要求有足够的非磁间距以便使方位误差保持在低于给定值的范围内(通常取值为0.5︒)。
该值的选择必须以井眼最不利方向为前提。
对于轴向干扰已知的区块,其感应磁性可忽略,方位误差主要取决于井眼方向,其值和Sin I Sin A m成正比,因此模型中方位误差是不可校正测量,需用一个合成误差项来预测井眼是垂直的或处于磁北极/南极时的零误差。
当井眼处于近水平或磁东/西向时预测误差比通常给定值要大,处于其它井眼方向时接近于给定值。
可以人为的构造一些加权函数来满足上述要求,但这有背于对误差项数目的限制。
最好的折中办法是把误差常量定为0.25︒、取决于井眼方向误差为0.6︒Sin I Sin A m。
尽管在理论及实测上都表明这些误差是不对称的,但所有误差项的传播仍可看作系统的。
在北半球,大多数情况下磁测量偏向北极。
在保持均方根不变的前提下,对取决于井眼方向的误差项取平均值为0.33︒,不对称性误差(大约75%的测量都偏向北)取值为0.5︒。
未建立轴向干扰误差测量模型来纠正磁干扰。
法向干扰。
来自钻具的法向干扰并未在磁力计偏差中细分,它以同样的方式传递。
Anne Holmes从78次MWD测量中分析磁力计偏差,认为其是多任务纠正算法的一个副产品。
曾一度地一些局外人把其归于磁过热点(hot spots)并把之列为总误差的观点已被澄清,其均方根值给为57nT,要比单独由磁力计偏差引起的70nT小。
这表明:大体来说法向干扰没有对整体MWD误差产生重大影响,可以不列入模型中。
工具非线性误差。
工具非线性误差是由于传感器的轴线和井眼中心线不平行所致。
该误差可认为是两种独立现象的合成结果。
BHA挠度。
这是由于MWD钻铤在重力作用下变形所致。
以垂直平面为模型,该值和作用在井眼周围的重力分量成正比。
误差值取决于BHA类型和几何形状、传感器间距、井眼尺寸以及一些其它因素。
在水平井中对居中程度差的BHA用两维BHA模型作了计算,井斜校正为0.2︒或0.3︒。
对于居中钻具该值通常小于0.15︒。
在手头缺乏资料的情况下,在基本误差模型中取值为0.2︒是比较合理的。
如果考虑了挠度校正,应假设井眼和稳定器为同一尺寸。
作者对此作了比较,有关数据表明挠度校正的有效率达到60%,余一后置校正挠度残差0.08︒。
假设一井段内钻具同,所有的BHA挠度误差可看成系统误差。
径向对称非线性误差。
模型适用于任何工具面角。
John Turvill在同轴圆偏差允许的基础上对其值作了估计。
·传感壳里的传感束:容许偏差的三个分量为配合间隙0.023︒,同心度0.003︒,传感束垂直度0.031︒。
·钻铤内的传感壳:在居中及可回收的情况下取值0.063︒。
·钻铤本体孔径:一般MWD提供商认为允许间隙为0.05︒。
·井眼中的钻铤:API取钻铤垂直度为0.03︒,而MWD提供商的说明书中的值更可行。
·这些数据的均方根为0.094︒,是在最大容许偏差下,对居中的旋转钻具大致估计。
·作者对测量井斜超过46︒的点分析认为其均方根为0.046︒,模拟试验表明该数据约有0.007︒是传感器误差引起的。
·其它非线性误差:由于弯曲力导致钻铤变形不再处于垂直平面内,可用三维BHA 来估计,0.04︒是个较合理的值。
该误差不同于上述误差,不是由工具旋转产生的。
因此需用单独的加权函数,又因此值是如此的小,在实际中有理由认为其包含在径向对称非线性误差的其它来源里,估计该值为0.06︒,当BHA严重弯曲或用探针型MWD工具时该值估计过低。
该误差为系统型误差。
磁场的不确定。
对基本MWD测量,仅认为磁偏角影响计算方位。
然而,常规轴向干扰校正需估计磁倾角和磁场强度,任何估计的误差将导致计算方位的误差。
英国地质测量所研究了用地球地磁模型来估计井下瞬时周围磁场强度可能产生的误差,发现存在5个误差源:同一时期模型主磁场强度和实际主磁场强度的差异,模型长期变化与实际长期变化的差异,由于电离层电子流导致的常规(每日的)变化,由于在磁气圈电子流及地壳的不规则导致的暂时不规则变化。
通过一系列假设及正常的钻进速度下,结果如下:注*:北纬或南纬60︒以下**:北纬或南纬60︒处+:日常和非常规变化在不同测量中有随机性。
两种误差源相关性为0.95,连续测点的相关性大致为0.5。
占主要位置的误差源是地壳的不规则性,由地球地壳岩石磁性不同造成的。
上述数据为北海处测得数据。
在某些地区,尤其是高纬度地区及火山岩接近于地表的地方,将会有更大的值,其它地区以沉积岩为主的将要小些。
在手头缺少资料情况下,由地球地质模型确定的在某一时间和地点,磁场强度不确定性的估计可通过上述数据项的统计总计而得。
这就存在一并发症:随着磁场强度的水平分量减少,确定磁偏差的难度增加,这必须加以考虑。
可以通过把该误差分解成两部分来解决:一个常量及一个和磁场强度水平分量成反比的变量B H。
对模型来说这种分解有些随意,但是在Lerwick Shetland(B H=15000nT)总的磁偏差不确定性正如BGS研究所料(为0.49︒)。
由于磁场强度误差主要取决于地壳不规则,因此认为其是全球系统误差,归结如下:井深误差。
Ekseth发现了14种钻杆深度测量误差的物理源,并列出表达式来预测其大小,通过在表达式里代入典型的参数值,来预测不同类型井的总误差,然后他归总成一个仅有四项的简单模式,并选用尽可能和考虑全部误差源时的预测接近的值。
结果如下:对基本模型,陆地钻机(或修井机或钻机平台)的井深误差值可以选择。
伸长类误差在深井中起主要作用,有两方面物理效应:钻杆的伸长和热膨胀。
基本MWD模型忽略的误差。
一些影响MWD测量的误差未在基本误差模型中反映。
电子仪器及分辨率:在工具到地面自动测量记录传导系统中电子仪器和分辨率的限制所产生的总误差认为对精度影响不大。
在长测量间距中该误差认为是随机的。
外部磁干扰:Ekseth探讨了残留在套管串的磁性对磁测量的影响,并列出套管鞋处及与套管串平行时的方位误差表达式。
干扰当然不能忽略,但却很难量化,也很难合并在误差建模软件中,处理干扰误差的合理方法是设计质量程序来限制其影响。
测量间距和计算方法的影响:本文讨论的模型是建立在这样的假设基础上:无误差的测量向量P导致一个无误差的井眼位置向量r。
假如测量计算采用了最小曲率公式,则只有在井眼轨迹是一个真圆弧时该假设是正确的,只要测量间距不超过100ft,产生的误差只对少数数据有影响,可忽略不计。
重力场的不确定性:名义上和实际重力场强度的差异对MWD精确度无影响,因为只有部分加速度计测量值用于计算井斜和方位。
过失误差:对MWD误差源的全面探讨中必须考虑任何可能对总误差有影响的过失误差,过失误差又叫人为误差。
这些误差缺乏预见性且和前面的误差一样,在假设运用了正确的方法和程序,它们可以不考虑在误差模型中。
参考文献:1、H.S.Williamson:“Accuracy Prediction for Directional Measurement While Drilling”,SPE (December 2000)67616。