3 空间力系
03第三章 空间力系
m (F) = m (F ) z O xy = m (F ) +m (F ) O x O y
即
m (F) = xY − yX z
同理可得其余两式,即有:
m (F) = yZ − zY x my (F) = zX − xZ m (F) = xY − yX z
力对轴的矩的解析式
三、力对点的矩与力对通过该点的轴之矩的关系 ⒈ 定理 力对点的矩矢在通过该点的 任意轴上的投影等于这力对于该 轴的矩。 轴的矩。这就是力对点之矩与对 通过该点轴之矩的关系。 通过该点轴之矩的关系。 ⒉ 证明
第3章 章 空 间 力 系
本章重点、 本章重点、难点
⒈重点
力在空间直角坐标轴上的投影和力对轴之矩。 力在空间直角坐标轴上的投影和力对轴之矩。 空间力系平衡方程的应用。 空间力系平衡方程的应用。 常见的空间约束及约束反力。 常见的空间约束及约束反力。
⒉难点
空间矢量的运算, 空间矢量的运算,空间结构的几何关系与立体 图。
四、空间力偶系的合成与平衡 ⒈ 合成 由于空间力偶系各力偶是自由矢量,只要不改变各分力偶 矩矢方向,将它们都滑移至某汇交点,它们的合成符合矢量合 成法则。 即:合力偶矩 = 分力偶矩的矢量和。
n i= 1
即: m = m +m +m +L m = ∑m + n 1 2 3 i
2 2 大小: m = mx ห้องสมุดไป่ตู้m2 +mz ; y
四、力对点的矩的解析求法 又由于
m (F) = r ×F O =[m (F)]xi +[m (F)]y j +[m (F)]z k O O O
=mx (F)i +my (F) j+mz (F)k
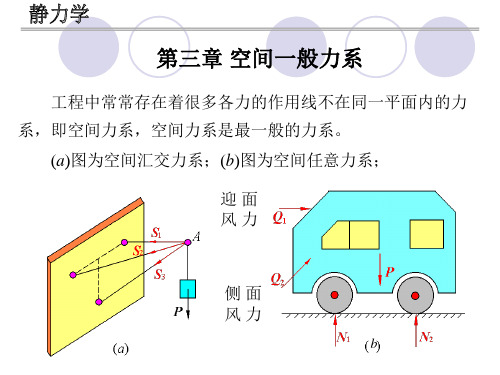
力学第三章空间力系
第三章空间力系二、基本内容1. 基本概念1) 力在空间直角坐标轴的投影(a) 直接投影法:巳知力F 和直角坐标轴夹角a 、丫,则力F 在三个轴上的投 影分别为X = F cos aZ = Feos/(b) 间接投影法(即二次投影法):巳知力F 和夹角八°,则力F 在三个轴上的 投影分别为X = F sin/cos^9Y = F sin/sin 。
Z = F cos/2) 力矩的计算(a) 力对点之矩—、目的和要求能熟练地计算力在空间直角坐标轴上的投影。
熟练掌握力对点之矩与力对轴之矩的计算。
对空间力偶的性质及其作用效应有清晰的理解。
了解空间力系向一点简化的方法,明确空间力系合成的四种结果。
能正确地画出各种常见空间的约束反力。
会应用各种形式的空间力系平衡方程求解简单空间平衡问题。
对平行力系中心和重心应有清晰的概念,能熟练地应用坐标公式求物体 的重心。
1、2、3、4、5、6^ 7、在空间情况下力对点之矩为一个定位矢量,其定义为i j kM0(F) = rx F = x y z = (yZ - zY)i + (zX - xZ)j + (xY - yX)kX Y Zr = xi + yj + zk F = Xi+ Yj + Zk其中尸为力尸作用点的位置矢径(b)力对轴之矩在空间情况下力对轴之矩为一代数量,其大小等于此力在垂直于该轴的平面上的投影对该轴与此平面的交点之矩,其正负号按右手螺旋法则来确定,即M Z(F) = ±F u,h = +2AOAB在直角坐标条下有Mx (乃=yZ-zY M y (F)=zX-xZ M z (F) =xY-yX(c)力矩关系定理力对己知点之矩在通过该点的任意轴上的投影等于同一力对该轴之矩。
在直角坐标系下有Mo(F)^M x(F)i+My(F)j+M2(F)k(d)合力矩定理空间力系的合力对任一点之矩等于力系中各力对同一点之矩的矢量和,即Mo g)二 W, (F)空间力系的合力对任一轴(例如z轴)之矩等于力系中各力对同一轴之矩的代数和,即M z(F R)=ZM z(F)=Z(xY-yX)3)空间力偶及其等效条件(a)力偶矩矢空间力偶对刚体的作用效果决定于三个要素(力偶矩大小、力偶作用面方位及力偶的转向),它可用力偶矩矢肱表示。
3空间力系解析
(1)球铰(球形铰链)
球形铰链
(2)轴承(滚珠轴承),蝶铰链
轴 承
ZA
XA
蝶 铰
(3)止推轴承
(4)空间固定端
[例2] 图示起重机自重不计,已知:AB=3m,AE=AF=4m, Q=200kN,起重臂AC位于拉索BE、BF的对称平面内。求:索
X i 0, TA TB cos60 0
TA TB cos60
3 80 1
6
2
11.5 ( N )
Yi 0, N A TB sin 60 0
NA
3 80 6
3 20 ( N ) 2
[例5]绞车的轴安装于水平位置。已知绞车筒半径r1=10cm, 胶带轮半径r2=40cm,a=c=80cm,b=120cm,重物重P=10kN 。设胶带在垂直于转轴的平面内与水平成α=300角,且
三、空间一般力系向一点的简化
把研究平面一般力系的简化方法拿来研究空间一般力系的 简化问题,但须把平面坐标系扩充为空间坐标系。
设作用在刚体上有 空间一般力系
F1, F2 , F3 Fn 任选O点——简化中心
m1
F'1 F'n
= mn
m2
F'2
①根据力的平移定理,将各力向O点平移, 得到一空间汇交力系: F '1,F2 ',F3'Fn ' 和一附加空间力偶系:m1,m2 ,mn
[注意] m1,m2 ,mn 分别是各力对O点的矩。
②合成 F '1 , F2 ', F3 ',, Fn ',得主矢 R '
第三章 空间力系

Ft tan Fa Ft tan Fr cos
第三章 空间力系
【课堂练习】图示力F作用在A点,此力在x轴、y轴、z轴 上的投影分别是多少?
第三章 空间力系
三、交于一点且互相垂直的三力的合成
力直角平行六面体法则
F=
Fx2 Fy2 Fz2
Fx cosα= F
Fy cosβ= F
第三章 空间力系
(2)力F对各坐标轴之矩为: Mz(F )= Mz(Fx)+Mz(Fy)= -Fx· y+Fy· x= -10.98 N· m Mx(F )=Mx(Fy)+Mx(Fz)= -Fy· z-Fz· y= -105 N· m My(F)=My(Fx)+My(Fz)=Fx· z+Fz· x=53.3 N· m。
解:
(1)确定车刀刀尖为研究对象,以工件主轴为水平轴空间 直角坐标系。
第三章 空间力系
( 2)刀尖受力分析
刀尖受到径向力Fx(沿x轴方向)、轴向力Fy(沿y轴方 向)、圆周力Fz(沿z轴方向)的作用。 (3)用力直角平行六面体法则求合力F 以三力Fx、Fy、Fz为棱边作一直角平行六面体,则此六面 体的对角线即为三力的合力F=19.6 kN
第三章 空间力系 三、空间力系的平衡条件和平衡方程
力矢的主矢和力系对空间任意一点的主矩都等于零。
FR' 0
,
Mo 0
Fy =0 Fy=0 Fz=0 Fz =0 Mx(F )=0 Mz(F )=0
• 空间汇交力系力系 Fx =0 • 空间平行力系力系 Fy=0 • 空间任意力系力系 Fx=0 • 空间力偶系力系
第三章 空间力系 四、空间力系平衡的平面解法
1.确定研究对象,画出受力图。
第三章空间力系
y
x
b
求图示正立方体上的力F 在x y z三个坐标轴
上的投影
z
y
x
F
思考:何时力在坐标轴上的投影为零?
求图示正立方体上的力 F 在坐标轴AB上的投影
z F
A
y
x
B
7
静力学
第四章 空间力系
如图所示圆柱斜齿轮,其上受啮合力Fn的作用。已知斜
齿轮的啮合角(螺旋角) β 和压力角 q ,试求力 Fn 沿 x,y 和 z
z Fz
F
kj Fx i
Fy
y
x
2 间接投影法(二次投影法)。
Fz F cos
Fx F sin cos
F y F sin sin
z Fz
F
Fx
x
Fxy
Fy y
求图示正立方体上的力F 在x y z三个 坐标轴上的投影
z z
F
F
y
c
Fxy q
y
x
a Fxy q
1.力偶不能合成为一个力,也不能用一个力来平衡, 只能用力偶来平衡 。 2.力偶对空间内任意一点的矩矢都等于力偶矩矢, 与矩心无关 3.力偶的可传性
作用平面内移动+可平移到与作用平面平行的任意平面上
4力偶可改装性
4.4 空间力偶等效定理
空间力偶的等效条件是:两个力偶的力偶矩矢相等。
30
四、空间力偶系的合成 1 空间力偶系
力对点的矩以矢量表示-力矩矢
力矩矢MO(F)在三个坐标轴上的投影为
z
B
[M O (F )]x yFz zFy
MO(F)
F
[MO (F)]y zFx xFz
第三章 空间力系

例3-9
已知: F 2000N, F2 2F1, 30 , 60 , 各尺寸如图
求: F1, F2 及A、B处约束力
解: 研究对象,曲轴
列平衡方程
Fx 0 Fy 0
F1 sin 30 F2 sin 60 FAx FBx 0
F2
F1
0
M z F 0 (F1 sin 30 F2 sin 60 ) 200 FBx 400 0
F1 3000N, F2 6000N, FAx 1004N, FAz 9397N, FBx 3348N, FBz 1799N,
例3-10
已知: Fx 4.25N, Fy 6.8N, Fz 17N,
Fr 0.36F , R 50mm, r 30mm 各尺寸如图
求: (1) Fr , F(2)A、B处约束力 (3)O 处约束力
解: 研究对象1:主轴及工件,受力图如图
Fx 0 Ft FBx FAx Fx 0
M x 0 F2 400 FBz 800 0
M z 0 F1 400 FBx 800 0
FAx FBx 1.5N FAz FBz 2.5N
§3–4 空间任意力系向一点的简化·主矢和主矩
一.空间任意力系向一点的简化
Fi Fi Mi MO (Fi )
第三章 空间力系
§3–1 空间汇交力系
当空间力系中各力作用线汇交于一点时,称其为空间汇交力系.
一.力在直角坐标轴上的投影
直接投影法
Fx F cos
工程力学教学课件模块3空间力系

的单位为N•m或kN•m。
由上述结论可知,力的作用线与轴相交或平
行时,力对轴之矩等于零。
提
示
3.2.2 合力矩定理
在平面力系中推导出来的合力矩定理对空间力系也同样适用,即空间力系中的合力对某轴之
矩等于力系中各分力对同一轴之矩的代数和,其表达式为
在计算力对轴之矩时,有时应用合力矩定理会使计算变得简单:先将力F沿空间直角坐标轴
Fz=Fsin 60°=600×0.866=520(N)
19
3.2.2 合力矩定理
20
3.2.2 合力矩定理
(2)计算力对轴之矩。先将力F在作用点处沿x、y、z方向分解,得到
三个分量Fx、Fy、Fz,它们的大小分别等于投影Fx、Fy、Fz的大小。
根据合力矩定理,可求得力F对指定的x、y、z轴之矩。
(b)所示。
先将力F向Axy平面和Az轴投影,得到Fxy和Fz;再将Fxy向x、y轴
投影,得到Fx和Fy。于是,有
Fx=Fxycos 45°=Fcos 60°cos 45°=600×0.5×0.707=212(N)
Fy=Fxysin 45°=Fcos 60°sin 45°=600×0.5×0.707=212(N)
力FNA、FNB、FNC的作用下保持平衡,各力的作
用线相互平行,构成空间平行力系。
3.3 空间力系的平衡方程
30
3.3 空间力系的平衡方程
(2)根据各力的作用线方向与几何位置,建立空间直角
坐标系Hxyz(点H为坐标原点)。
(3)列平衡方程并求解。
∑Fz=0,FNA+FNB+FNC-G=0
∑Mx(F)=0,FNC-G=0
理论力学3—空间力系

r r ur
uur uur r
i jk
M O (F ) r Fuur = x y z
z MO(F)
kr Oj
ih x
Fx Fy Fz
r
r
ur
( yFz zFy )i (zFx xFz ) j (xFy yFx )k
B F
A(x,y,z) y
3.2.1 力对点的矩以矢量表示-力矩矢
力矩矢MO(F)在三个坐标轴上的投
偶系,如图。
z F1
z M2
z
Fn O
x F2
= M1
y
O
x F'n
F'1
= MO
Mn y
O
F'2
x
F'R y
uur uur
uFuri Fuiur uur
M i M O (Fi ) (i 1, 2,L , n)
3.4.1 空间力系向一点的简化
空间汇交力系可合成一合力F'R:
uur uur uur FR Fi Fi
如图所示,长方体棱长为a、b、c,力F沿BD,求力F对AC之矩。
解:
uur uur uur M AC (F ) M C (F ) AC
uur uur
M C (F ) F cos a
Fba
a2 b2
B
C
F
D
c
A
a
b
uur uur uur
M AC (F ) M C (F ) cos
Fabc a2 b2 a2 b2 c2
(F ) uur
[M O (F )]y M y (F )
uur uur
uur
[M O (F )]z M z (F )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例题3 例题3-6
及各尺寸, 均质长板 重为P及各尺寸,A处作用水平力 已知: 已知: F=2P。 F=2P。求:各杆内力 解:研究对象为长方板 受力如图
P a M 6 6 ∑ AB(F) =0 −F ⋅a−2⋅P=0 F = 2 M ∑ AE(F) =0 F =0 5 M F =0 ∑ AC(F) =0 4
Fz
α=7 ° 1 64 '
z
F
β =7 ° ' 17
γ =2 ° 3
空间汇交力系平衡的充分必要条件(平衡方程): 空间汇交力系平衡的充分必要条件(平衡方程)
例3-2 如图所示为空气动力天平上测定模型所受阻力用的一个悬挂 3 节点O,其上作用有铅直载荷F。钢丝OA和 所构成的平面垂直于 节点 , 其上作用有铅直载荷 。 钢丝 和 OB所构成的平面垂直于 铅直平面Oyz,并与该平面相交于OD,而钢丝 则沿水平轴 。已知 ,并与该平面相交于 ,而钢丝OC则沿水平轴 则沿水平轴y。 铅直平面 OD与轴 间的夹角为 ,又∠AOD = ∠BOD = α,试求各钢丝中的拉 与轴z间的夹角为 , 与轴 间的夹角为β, 力。
在三轮货车上放着一重W=1 000 kN的货物,重力 的货物, 例3-4 在三轮货车上放着一重 的货物 重力W 的 作 用 线 通 过 矩 形 底 板 上 的 点 M 。 已 知 O1O2=1 m , O3D=1.6 m,O1E=0.4 m,EM=0.6 m,点D是线段 1O2的中 点 是线段 是线段O 试求A,B,C,各处地面的铅直反力。 各处地面的铅直反力。 点,EM⊥ O1O2。试求 试求 各处地面的铅直反力
合力偶) ⊕ 主矩 Mo (合力偶) 合力偶
3)空间任意力系的平衡方程 )
F F F ∑ =0, ∑ =0, ∑ =0
x y z
M M M ∑ (F) =0, ∑ (F) =0, ∑ (F) =0
x y z
矩式, 矩式, 有2力4矩式,3力3矩式, 4力2矩式, 5力1矩式, 6矩式 矩式, 矩式,
简化结果讨论
FR ≠ 0, Mo= 0 FR = 0, Mo ≠ 0 FR = 0, Mo = 0 FR ≠ 0, Mo ≠ 0 FR ⊥ M FR ∥ M FR非∥非⊥M ∥ ⊥
合力 FR 力偶 M 平衡
合力 FR 力螺旋 力螺旋
力螺旋工程实例
空间一般力系的简化和平 衡 ⇒ 主矢 FR (合力) 合力) 合力
F1 F2
z
′ F 2
F3
O
y
′ F 3 ′ F 1
又问: 使这个刚体平衡, 又问 使这个刚体平衡,还需要施加怎样
x
一个力偶。 一个力偶。
解: 1.画出各力偶矩矢(见右图) .画出各力偶矩矢(见右图)
z
M1 M2
45° 45°
M3 y
O
x
2.合力偶矩矢M 的投影。 .合力偶矩矢 的投影。
M =Mx(=0 +Mx(=0 +Mx(=0 =0 ) ) ) x 1 2 3
x y z
M M M ∑ (F) =0, ∑ (F) =0, ∑ (F) =0
x y z
两个原则 1. 选取投影轴时, 应尽量使得较多的未知力与该轴垂直 选取投影轴时 应尽量使得较多的未知力与该轴垂直 未知力与该轴垂直; 投影轴 2. 选取取矩轴时, 应尽量使得较多的未知力通过或平行该轴 选取取矩轴时 取矩轴
A
x
2 2 2 F= F +F +F = 45 +63 + 8 . 2 . 2 12 x y z
x
Fy y
α β γ
= 96 k 1. N 力F的方向 的方向
F 45 . x c s α= = o =02 0 , .2 F 1 .6 9 F 63 . y c s β= = o =03 2 , .2 F 1 .6 9 F 1 8 z .1 c sγ= = o =09 9 , F 1 .6 9
O1 E D B A
M W
O3 C
z
FA FB
O1 E D
O2
FC
解:
y
M
O3
1.取货车为研究对象。 取货车为研究对象。 取货车为研究对象 2.受力分析如图。 受力分析如图。 受力分析如图
x
O2
W
3.列平衡方程 列平衡方程
F ∑ =0 ,
z
F +F +F − =0 A B C W
F ⋅OD W E =0 C 3 − ⋅ M
M x ( , =0, ∠Mi) =9 ° 0 M M ( , c s M j) = y =02 2, ∠M j) =7 .8 o( , .6 4 ° M M ( , ) 5° c s Mk = z =09 5, ∠Mk =1 .2 o( , ) .6 M
4. 为使这个刚体平衡,需加一力偶,其力偶矩矢为 为使这个刚体平衡,需加一力偶, M4 = - M 。
力对点之矩
空间力系问题中用力矩矢量 描述力的转动效应。 描述力的转动效应。
矢量r 矢量 为自矩心至力作用 点(A)的矢径。 )的矢径。
力对点之矩的矢量运算
力对轴之矩
力与轴(1)相交或(2)平行时 力对该轴的矩为零。 力与轴(1)相交或(2)平行时,力对该轴的矩为零。 (1)相交 平行
力对轴之矩的运算
力偶矩矢 M1
(1)力偶的三要素: 力偶的三要素: 力偶的三要素 大小:力偶矩(矢量 的大小 的大小) 大小:力偶矩(矢量M的大小); 作用平面:力偶方向垂直于作用平面; 作用平面:力偶方向垂直于作用平面; 转向:右手螺旋(正向)。 转向:右手螺旋(正向)
M2
力偶矩矢
(2) 力偶矩矢是自由矢量,一般从力偶 力偶矩矢是自由矢量, 矩中点画出。 矩中点画出。 M1
W O −F ⋅O −F ⋅O 2 =0 ⋅ 1E C 1D B 1 O
z
FA FB
O1 E D
M ∑ =0 ,
x
M ∑ =0 ,
y
4.联立求解 联立求解
F =3 5 N F =2 3 N F =4 2 N 7 , B 1 , A 1 C
x
FC
y
M
O3
O2
W
例3-5 在图中皮带的拉力 F2 = 2F1, 曲柄上作用有铅垂力F 曲柄上作用有铅垂力 = 2 000 N。 曲 已知:皮带轮的直径 已知:皮带轮的直径D=400 mm,曲 的直径 皮带1和皮带 柄长R=300 mm,皮带 和皮带 与铅 皮带 和皮带2与铅 垂线间夹角分别为α和β, α =30o , β 垂线间夹角分别为 和 =60o ,其它尺寸如图所示。 其它尺寸如图所示。 其它尺寸如图所示 求:皮带拉力和轴承约束力。 皮带拉力和轴承约束力。
y
D F − (F −F) =0 R 2 1 2 Fsn 3 o ×2 0+F sn 6 o ×2 0−Fx ×4 0=0 0 0 2i 0 0 B 0 1 i
M , ∑ (F) =0
z
又有 解得
F2=2F1
F =3 0 N 00 1 F =60 0N 0 2 Fx =− 0 4N 10 A Fz =93 7N 9 A Fx =3 4 N 38 B Fz =− 7 9N 19 B
三维空间中的力对轴之矩 等于该力在垂直于轴的平 面上的投影对轴与该平面 交点之矩。 交点之矩。
ቤተ መጻሕፍቲ ባይዱ
力对轴之矩代数量的正负号
力对轴之矩
力对点的矩与力对轴的矩之间关系
力对点的矩与力对轴的矩之间关系
力对点的力矩矢在通过该点的任一轴上的投影, 力对点的力矩矢在通过该点的任一轴上的投影,等 于力对该轴的矩。 于力对该轴的矩。
3.空间一般力系的简化和平衡 3.空间一般力系的简化和平衡 1) 简化方法 简化方法:
基础:力的平移定理 基础 力的平移定理
3.空间一般力系的简化和平衡 3.空间一般力系的简化和平衡
1) 简化方法
基础:力的平移定理 基础 力的平移定理 简化中心 O 空间汇交力系 ⊕ 空间力偶系
=> 主矢 FR (合力) ⊕ 对简化中心的主矩 Mo (合力偶) 合力) 对简化中心的主矩 合力偶) 合力 合力偶
M =My +My +My =1 .2N m 1 ⋅ y 1 2 3
M =Mz +Mz +Mz =4 .2N m 1 ⋅ z 1 2 3
3.合力偶矩矢M 的大小和方向。 .合力偶矩矢 的大小和方向。
2 2 2 M= M +M +M =4 .7 N m 2 ⋅ x y z
c s Mi) = o( ,
列平衡方程
D B
A
F3
z y C
O
F , ∑ =0 Fsinα−Fsinα=0
x
2 3
F2 x
α β α
F , ∑ =0
y
F1
F−Fc sα i β−Fc sα i β=0 sn sn 1 2 o 3 o
F , ∑ =0
z
F
F c sαc sβ+Fc sαc sβ−F=0 o o 2 o 3 o
联立求解可得
3)空间任意力系的平衡方程 )
F F F ∑ =0, ∑ =0, ∑ =0
x y z
M M M ∑ (F) =0, ∑ (F) =0, ∑ (F) =0
x y z
Q1. 空间平行力系的平衡方程有几个? 形式如何? 空间平行力系的平衡方程有 的平衡方程有几 形式如何?
有3个。
3)空间任意力系的平衡方程 )
F=Ft nβ a 1
F F =F = 2 3 2 o αc sβ cs o
2 力对点之矩和力对轴之矩
使螺母产生绕O F 使螺母产生绕O点转动效应的 度量:力矩(force moment for a 度量:力矩 given point)