二次规划问题
线性规划与二次规划的应用
投资组合优化
定义:在给定风险 水平下,最大化预 期收益或最小化风 险
应用场景:股票、 债券等金融资产 组合
目标:实现资产 保值增值,降低 风险
方法:利用二次 规划算法进行优 化求解
电力系统优化
二次规划用于解决电力系统中的无功优化问题,提高电力系统的稳定性和经济性。 通过二次规划,可以优化电力系统的运行方式,降低线损,提高输电效率。 二次规划在电力系统中的应用还包括负荷预测、机组组合、经济调度等方面。
实例:如某公司 需要将产品从多 个产地运往多个 销售地,如何安 排运输工具和运 输路线使得总成 本最低。
分配问题
定义:将有限的资源按照一定的约束条件分配给各个部门或个体,使得总效益最大
应用场景:资源分配、生产计划、物流调度等
线性规划模型:通过线性方程组表示约束条件和目标函数,求解最优解
实例:某公司有10台机器,需要生产3种产品,每种产品需要不同数量的机器,如何分配机器 使得总产量最大
算法原理:基于 K u h n - Tu c k e r 条 件和梯度下降法, 通过迭代更新可 行解,逐渐逼近 最优解。
算法步骤:初始 化可行解,计算 目标函数的梯度 和约束条件的雅 可比矩阵,迭代 更新可行解,直 到满足收敛条件。
算法优势:内点 法具有全局收敛 性和多项式时间 复杂性,适用于 大规模优化问题。
感谢您的观看
灵活性
线性规划的灵活性:适用于多种问题,如生产计划、资源分配等 二次规划的灵活性:适用于凸优化问题,如最小二乘法、约束最小化等
线性规划的局限性:对于非线性问题,需要转化为线性问题,可能损失精度 二次规划的局限性:对于非凸问题,可能陷入局部最优解,而非全局最优解
单纯形法
定义:单纯形法是一种求解线 性规划问题的迭代算法
二次规划ppt课件
• 满足约束条件的点称可行点,可行点集合构成可行域
2
线性规划与非线性规划
• 非线性规划(Nonlinear Programming)
• 非线性规划的数学模型可以表示为
min f x
xRn
s.t. gi x 0 i hj x 0 j
• 在目标函数或者约束函数中至少有一个函数是非线性的 • 当非线性规划问题的可行域为整个实数域时,称为无约束优化问题,
0
优化问题无界或者不可行
• output.a lgorithm
output.iterations
优化算法类型 算法的迭代次数
• lambda.ineqlin
不等式约束的乘子
lambda.eqlin
等式约束的乘子
14
lambda.lower / upper 变量下界和上界
案例分析
• 假设有四种投资1,2,3,4,第i种投资的收益率 ri 的预期收益均值为 i E ri ,
• 在满足收益率条件下最小化风险模型:
min f x 1 xTQx 2
2 s.t. uT x M
4
xi 1, x 0
1
16
案例分析
Q 社保债券 技术交易中心 管理咨询中心 游乐中心 预期收益
社保债券 2 0.4 0.1 0 7
技术交易中心 管理咨询中心
0.4
0.1
4
3
3
6
-1
1
8
10
游乐中心 0 -1 1 10 14
方差
2 iBiblioteka Erii2
表示投资的风险大小,即收益率关于均值的偏离程度
• 令 xi 为第i个项目的投资额占总投资的比例,向量 x x1, x2, x3, x4 T表示一个
二次规划

L( x, λ) = f (x) + ∑ λ j g j (x)
j =1
m
(1) (2) (3) (4) (5)
f (x) + ∑ λ j g j (x) = 0 (梯度条件) 梯度条件)
j =1
m
g j ( x) ≤ 0
(约束条件) 约束条件) (松弛互补条件) 松弛互补条件) (非负条件) 非负条件) (正则条件或约束规格) 正则条件或约束规格)
f (x) = ci
g1 (x) = 0
x
*
f (x(0) ) x (k ) g 2 (x) = 0 x(0)
f (x(k ) )
x1
T 搜索方向满足; 搜索方向满足; f ( x)
P < 0 ,即; f ( x ) T P > 0 π f (x)T 与 P 夹角; α < 夹角;
2
am,m +1 am,m + 2
B = (p1p 2 , , p r , , p m )
f = f 0 + (c k z k ) x k
1 0 0 1 0 0 0 x1 0 x2 + 1 xm
k
B
C
XB x1 a1n b1 a1n xm b2 = xm +1 amn bm XC xn
二次规划: 二次规划:不等式约束问题的有效集法
二次规划: 二次规划:其它算法简介
�
′ a1k ′ ark x ≥ 0 k ′ amk
x B = ( x1 x2 , , xr , , xm ) B = (p1p 2 , , p r , , p m )
x B = ( x1 x2 , , xk , , xm ) B = (p1p 2 , , p k , , p m )
可行方向法二次规划求解算法改进

可行方向法二次规划求解算法改进一、传统可行方向法求解:本文基于可行性方向法的SVM 算法步骤如下:1. 求解二次规划问题12,111minK(,)..00,1,2,......,lli ji j i j ii j i l iii i y y x x s tyC i lαααααα===-=≥≥=∑∑∑2. 将上式转化成能用可行性方向法进行求解的二次规划标准形式121min ()..0,1,..0,1,..T T li ii i i f G e s tyC i li lαααααααα==-=≥=≥=∑其中**G=(g )=(K(,)),e(11,,1)ij l l i j i j l l y y x x = ,;3. 取满足约束条件的初始可行点1(0,0,....0)α=; 4. 确定kα处的有效约束指标集k 1i k 2i (){|C}(){|0}I k i I k i αα====5. 求解线性规划子问题121min ()..00,()0,(),1,..k T dlkii i k i k i k i f ds tdy d i I k d i I k C d C i lα=∇=≥∈≤∈≥≥-=∑其中1()11,2,3....jlk kiij j f g i l αα=∇=-=∑求得12(,,...)kk kk T l dd d d =;说明:在该步骤中()k T f d α∇为函数k f α在点的方向导数。
若该值小于0,说明f 沿着d 方向值下降;若该值等于0,说明k f α在点为极值;若该值大于0,说明f 沿着d 方向值上升。
min ()k Tdf d α∇就是要求下降最快的方向。
10lk i i i d y ==∑为等式约束,为保证沿着d 方向上的点为可行点。
210,();0,()k k i i d i I k d i I k ≥∈≤∈为不等式约束,为保证沿着d 方向上的点为可行点。
,1,..k i C d C i l ≥≥-=是为了获取一个有限解增加的约束条件。
二次规划算法在实现最优控制中的应用分析
二次规划算法在实现最优控制中的应用分析随着科技的不断发展,最优控制问题已成为控制和优化领域中的热门话题。
在实际应用中,最优控制可以被用于调节自动控制器、实现运动规划、优化电力等多种控制问题中。
而其中的二次规划算法则成为了最常用的实现方式之一。
本文将对于二次规划算法在实现最优控制中的研究进展和应用进行分析。
1. 什么是二次规划算法首先,我们需要了解二次规划算法。
二次规划是指求解如下形式的最优化问题:$\min_{x}{\frac{1}{2}x^TQx + c^Tx}$$Ax\ \leq b$其中Q是正半定矩阵,c是列向量,A是矩阵,b是列向量。
这个问题可以被称为二次规划问题。
它的解通常被称为问题的最优解,即$x^*$。
其中,$\min$代表最小值,再加上$Ax\ \leq b$的限制条件,即可得到二次规划问题。
2. 二次规划在最优控制中的应用二次规划算法在最优控制中是一个非常重要的问题,因为很多最优控制问题都可以被抽象为一个二次规划问题。
比如在运动规划问题中,我们需要寻找机器人的最优轨迹来实现控制的效果。
而这个问题可以被转化为一个二次规划问题,通过求解该问题来得到最优解。
因此,二次规划算法在机器人控制中有着广泛的应用。
此外,在电力控制领域中,二次规划算法也有很大的作用。
比如,在电网中,我们需要寻找最优的发电计划和消耗计划来保证系统安全和经济效益。
这个问题同样是一个优化问题,可以被抽象为一个二次规划问题。
通过求解二次规划问题,我们可以得到系统的最优解,从而实现电力控制的目的。
3. 基于二次规划算法实现最优控制的实例为了更好地理解二次规划在最优控制中的应用,我们可以看一下以下实例:假设有一个双轮差分式机器人,需要在一条平面上从起点到终点。
我们可以把这个运动规划问题抽象为一个最优化问题。
通过使用二次规划算法,我们可以求解出最优的轨迹,以实现机器人在最短时间内到达终点。
在这个实例中,我们将机器人的运动轨迹表示为一个函数f(x),其中x是机器人的状态。
凸优化问题的二次规划算法研究

凸优化问题的二次规划算法研究一、引言凸优化问题是数学领域的一个重要研究方向,广泛应用于工程、经济学、运筹学等领域。
其中,二次规划是一类特殊的凸优化问题,其目标函数为二次函数,约束条件为线性等式或不等式。
本文将对凸优化问题的二次规划算法进行研究,并探讨其在实际应用中的意义和挑战。
二、背景和意义在实际生活和工程领域中,我们经常面临各种决策问题。
这些决策问题通常可以被抽象为一个数学模型,并通过求解该模型来得到最佳决策方案。
而凸优化问题作为一种重要的数学工具,可以帮助我们解决这些决策问题。
其中,二次规划作为凸优化问题中的一个重要子类,在实际应用中具有广泛的意义和应用价值。
例如,在经济学中,我们可以通过求解一个二次规划模型来得到最佳投资组合;在运输领域中,我们可以通过求解一个带有线性约束条件和二次目标函数的二次规划模型来得到最佳的运输方案。
然而,由于二次规划问题的复杂性,其求解过程往往较为困难。
因此,研究二次规划算法具有重要的理论和实际意义。
通过研究和改进二次规划算法,我们可以提高求解效率,降低计算复杂度,并得到更加准确和可靠的结果。
三、常用的二次规划算法在研究凸优化问题的二次规划算法时,我们常用到以下几种方法:1. 内点法内点法是一种常用的求解凸优化问题的方法,在求解二次规划问题时也得到了广泛应用。
其基本思想是通过将约束条件引入目标函数,并通过迭代过程逐步逼近可行域内部。
内点法具有较好的收敛性和全局收敛性,在实际应用中取得了很好的效果。
2. 洗牌算法洗牌算法是一种基于随机优化思想的方法,在求解大规模二次规划问题时具有较好的效果。
其基本思想是通过引入随机因素来加速收敛过程,并在迭代过程中动态调整步长和方向。
洗牌算法具有较好的鲁棒性和快速收敛性,在处理大规模问题时具有一定的优势。
3. 分解法分解法是一种将原问题分解为若干子问题进行求解的方法,在求解二次规划问题时也得到了广泛应用。
其基本思想是将原问题分解为几个子问题,并通过迭代过程逐步逼近最优解。
二次规划实验举例
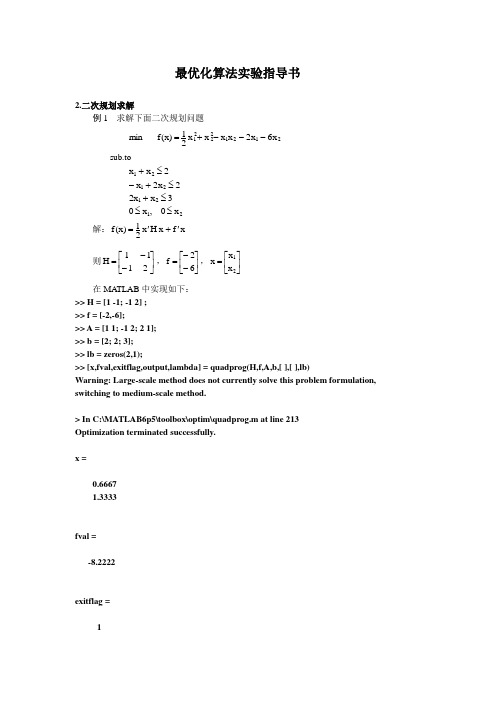
最优化算法实验指导书2.二次规划求解例1 求解下面二次规划问题21212221x 6x 2x x x x 21)x (f min---+= sub.to 2x x 21≤+2x 2x 21≤+-3x x 221≤+21x 0,x 0≤≤ 解:x f x H x 21)x (f '+'= 则⎥⎦⎤⎢⎣⎡--=2111H ,⎥⎦⎤⎢⎣⎡--=62f ,⎥⎦⎤⎢⎣⎡=21x x x 在MA TLAB 中实现如下:>> H = [1 -1; -1 2] ;>> f = [-2,-6];>> A = [1 1; -1 2; 2 1];>> b = [2; 2; 3];>> lb = zeros(2,1);>> [x,fval,exitflag,output,lambda] = quadprog(H,f,A,b,[ ],[ ],lb)Warning: Large-scale method does not currently solve this problem formulation, switching to medium-scale method.> In C:\MATLAB6p5\toolbox\optim\quadprog.m at line 213Optimization terminated successfully.x =0.66671.3333fval =-8.2222exitflag =1output =iterations: 3algorithm: 'medium-scale: active-set'firstorderopt: []cgiterations: []lambda =lower: [2x1 double]upper: [2x1 double]eqlin: [0x1 double]ineqlin: [3x1 double]例 1123 2212123min 246y x x x x x =+---..s t 123213123234,,0x x x x x x x x x +≤+≤+≤≥(1)标准形式:由 2212123246y x x x x x =+---22121231(22)2462x x x x x =+--- 知 200020000H ⎛⎫ ⎪= ⎪ ⎪⎝⎭为半正定矩阵,约束不必改动。
二次规划基本介绍
二次规划基本介绍二次规划(Quadratic Programming,简称QP)是数学规划的一种特殊形式,它的目标函数是二次函数,约束条件是线性函数。
在实际应用中,二次规划被广泛应用于经济学、运筹学、工程学等领域,具有重要的理论和实际意义。
二次规划的一般形式可以表示为:$$\begin{aligned}\min_{x} \quad & \frac{1}{2} x^T Q x + c^T x \\\text{s.t.} \quad & Ax \ge b \\&Cx=d\end{aligned}$$其中,$x$是优化变量,$Q$是一个对称正定的矩阵,$c$、$b$、$d$都是列向量,$A$、$C$是约束矩阵。
在约束条件中,$Ax \ge b$表示一组不等式约束,$Cx = d$表示一组等式约束。
二次规划的优化目标是寻找满足约束条件的$x$,使得目标函数最小。
目标函数由两部分组成,一部分是二次项,一部分是线性项,其中$Q$是二次项的系数矩阵,$c$是线性项的系数向量。
由于$Q$是一个对称正定矩阵,所以二次项是凸的,使得问题具有良好的性质。
二次规划的解法有多种方法,以下介绍其中两种常用的方法:内点法和激活集方法。
内点法是一种迭代求解二次规划问题的方法。
它通过将二次规划问题转化为一系列等价的线性规划问题来求解。
在每一次迭代中,内点法通过将问题的方向限制在可行域的内部,逐渐逼近最优解。
使用内点法求解二次规划问题的一个优点是,可以在多项式时间内找到最优解,尤其适用于大规模的问题。
激活集方法是一种基于约束的求解方法。
它通过不断修改约束条件,从而求解二次规划问题。
在每一次迭代中,激活集方法选取一个子集,称为“激活集”,包含满足等式约束、不等式约束等的约束条件。
然后通过解析方法或数值方法求解这个子问题,得到对应的最优解。
该方法的优点是,可以很好地处理不等式约束和等式约束,并且收敛性良好。
除了内点法和激活集方法,还有其他的求解方法,如:序列二次规划、信赖域算法、光滑方法等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
序列二次规划法 求解一般线性优化问题:
12min(x)h(x)0,iE{1,...,m}s.t.(x)0,i{1,...,m}ii
f
gI
(1.1) 基本思想:在每次迭代中通过求解一个二次规划子问题来确定一个下降方向,通过减少价值函数来获取当前迭代点的移动步长,重复这些步骤直到得到原问题的解。
1.1等式约束优化问题的Lagrange-Newton法 考虑等式约束优化问题 min(x)s.t.h(x)0,E{1,...,m}jfj
(1.2) 其中:,nfRR:()nihRRiE都为二阶连续可微的实函数.
记1()((),...,())Tmhxhxhx
.
则(1.3)的Lagrange函数为:
1(,)()*()()*()mTiiiLxufxuhxfxuhx
(1.3) 其中12(,,...,)Tmuuuu为拉格朗日乘子向量。 约束函数()hx的Jacobi矩阵为:1()()((),...,())TTmAxhxhxhx. 对(1.3)求导数,可以得到下列方程组: (,)()A()*(,)0(,)()TxuLxufxxuLxuLxuhx
(1.4) 现在考虑用牛顿法求解非线性方程(1.4). (,)Lxu的Jacobi矩阵为:
(,)()(,)()0TWxuAxNxuAx
(1.5) 其中221(,)L(,)()*()mxxiiiWxuxufxuhx是拉格朗日函数L(,)xu关于x的Hessen矩阵. (,)Nxu也称为K-T矩阵。对于给定的点(,)kkkzxu,牛顿法的迭代格式为:1kkkzzz.
其中kk(d,v)kz是线性方程组 kkkk
(,)()(x)A(x)u*()0(x)kkkkTTkkdWxuAxfAxvh
(1.6) 的解。 注意:只要kA(x)行满秩且(,)kkWxu是正定的,那么(1.6)的系数矩阵非奇异,且方程组有唯一解。
引理1:已知矩阵,nnnmURSR,则对任意满足*0TSx的非零向量x都有0TxUx的充要条件是存在常数*0,使得对任意的*都有 *(U*S*S)0,0TTnxxxR.
证明略。
鉴于方程组(1.6)的求解数值不稳定,故考虑将它转化成一个严格凸二次规划问题.转化的条件是(1.4)的解点*x处的最优性二阶充分条件成立,即对满足*()*0TAxd的任一向
量0d,成立***(,)*0TdWxud。
再由引理1知:当0充分小时,1(*,*)(*)(*)2TWxuAxAx正定。 考虑(1.6)中的(,)kkWxu用一个正定矩阵来代替,记 1(,)(,)()()2kTkkkkkBxuWxuAxAx
则当**(,)(,)kkxuxu时,矩阵**B(,)xu正定。 (1.6)的第一个展开式为 k(,)*d(x)*(x)(x)*TTkkkkkkkWxuAvfAu 将上式变形为:
k11[(,)()()]*d(x)*[()](x)22kkTTkkkkkkkkWxuAxAxAvuAxdf
令~1:()2kTkkkkuvuAxd后得:~k(,)*d(x)*(x)TkkkkkBxuAuf. 因此,(1.6)等价于 k~
k
(x)(,)()*()0(x)kkkkTkkdfBxuAxAxhu
(1.7) 进一步,可以把方程(1.7)转换成如下严格凸二次规划:
kkkkk1min(d)(x,u)df(x)2..(x)A(x)d0TTkqdBdsth
(1.8) 方程(1.7)和(1.8)具有同解的。 1.2一般形式的约束优化问题 将1.1节中构造二次规划子问题求解等式约束优化问题的思想推广到一般形式的约束优化问题(1.5)。在给定点kk(x,u,)kkz后,将约束函数线性化,并对拉格朗日函数进行二次多项式近似,得到下列二次规划子问题:
kkkkkkk1min(x,u)df(x)2(x)(x)d0,iE..(x)(x)d0,iTTTiiTii
dWdhhstggI
(1.9) 其中212kkkkkk{1,...,m},I{1,...m},WW(x,u,)(x,u,)kxxEL,拉格朗日函数为1211(,)()*()*g()mmiiiiiiLxufxuhxx
.
于是,迭代点kx的校正步kd以及新的拉格朗日乘子估计量11,kku可以分别定义为问题 的一个K-T点*x和相应的拉格朗日乘子向量*,*u。 定理1:给定约束优化问题(1.1)的最优解*d 和相应的拉格朗日乘子*,*0u.假定在*x处,下面的条件成立:
(1) 有效约束的Jacobi矩阵(x*)SJ行满秩,其中(*)E(*)SxIx;
(2) 严格互补松弛条件成立,即******(x)0,0,(x)0,(x)0;iiiiiiggg (3) 二阶最优性充分条件成立,即对满足*()*0TAxd的任一向量0d,成立****(,,)*0TdWxud.
那么若kkk(x,u,)充分靠近***(x,u,),则二次规划问题(1.9)存在一个局部极小点*d,使得其对应的有效约束指标集*()Sd与原问题在*x处的有效指标集*()Sx是相同的。
注意:在构造二次规划子问题时,需要计算拉格朗日函数在迭代点kx处的Hessen矩阵,计算量过大。为了克服这个缺陷,韩世平基于牛顿-拉格朗日法提出了一种利用对称正定矩阵kB来代替拉格朗日矩阵kW的序列二次规划法。
对于一般约束优化问题(1.1),在迭代点kkkkz(x,u,),构造下列形式的二次规划子问题:
kkkkkkk1min(x,u)df(x)2(x)(x)d0,iE..(x)(x)d0,iTTTiiTii
dBdhhstggI
(1.10)
并且用(1.10)的解kd作为原问题变量x在第k次迭代过程中的搜索方向。其中kd有一个好的性质是它许多罚函数(价值函数)的下降方向。例如,对于L1精确罚函数: 1(x,)f(x)[|h(x)||[g(x)]_|]iiiEiIP
其中0为罚参数,g(x)]_max{0,g(x)}ii。
为了保证SQR方法的全局收敛性,通常借助价值函数来确定搜索步长。用来衡量一维搜索的好坏。 算法(一般约束优化问题的SQP方法)
Step 0: 给定初始点12000(,u,)RRR,mmnx对称正定矩阵0nBR. 计算 00(x)ETAh,00(x)ITAg,000EIAAA.
选择参数1(0,),(0,1),2容许误差120,1,令:0.k Step 1: 求解子问题(1.10)得最优解kd. Step 2: 若k11||d||且k1k12||||||()_||hg,stop,得到(1.1)的一个近似KT点,,kkkxu(). Step 3: 对于某种价值函数(,)x,选择罚参数k,使得kd是该函数在kx处的下降方向。 Step 4: Armijo搜索. 令km是使下列不等式成立的最小非负整数m: mm'kkkkkkkk(d,)(,)(,;d),xxx
令k
m
1:,:.kkkkkaxxad
Step 5: 计算 1111111(),(),EkETITkkkkkIkAAhxAhxAA
以及最小二乘乘子
1111111kTkkkkkuAAAf
Step 6: 校正矩阵kB为1kB.令
11111,(,,)(,,)kkkkxkkkxkkksadyLxuLxu
1TTkkkkkkkkTTkkkkkBssBzzBBsBssz 其中 (1)Bskkkkkkzy
参数k定义为 kkkk..........1...........,sy0.2s0.8s,sy0.2ssTkkkTkTkkk
kkkTT
kkkkk
BsBsBsBssy
Step 7: 令:1,kk转1.