河科大振动力学第四章
振动力学第四章

]
[u]T
[m][u]
2mL2 0
0
2mL2
[K
]
[u]T
[k
][u]
2mgL 0 0 2mgL
运动方程已解耦。
2020年8月6日 20
《振动力学》
多自由度系统振动的基本知识
教学内容
4.1 广义坐标 4.2 线性系统的运动方程及其矩阵表达式 4.3 线性变换和坐标耦合 4.4 无阻尼自由振动,特征值问题 4.5 模态向量的正交性和展开定理 4.6 系统对初始激励的响应
{x(t)} [u]{(t)}
代入运动方程,则有:
[m][u 2020年8月6日 ]{} [k ][u]{} {P(t)} 17 《振动力学》
4.3 线性变换与坐标耦合
左乘 [u]T
[u]T [m][u]{}[u]T [k][u]{} [u]T {P(t)}
记 [M ] [u]T [m][u] [K ] [u]T [k][u] {N (t)} [u]T {P(t)}
其中,[m],[c],[k]为n维矩阵,分别为质量矩阵,阻尼矩
阵和刚度矩阵。
其中,刚度矩阵为:
2020年8月6日 《振动力学》
k11...k1 j ...k1n
[k
]
k21...k2
j
...k2
n
.....................
kn1...knj ...knn
5
4.2 线性系统的运动方程及其矩阵表达式
k3
x2
P2
(t)
0 0 m3 x3 0
k3
k3 k4 x3 P3(t)
矩阵形式为:
2020年8月6日 [m]{x} [k]{x} {P(t)} 15 《振动力学》
振动习题答案
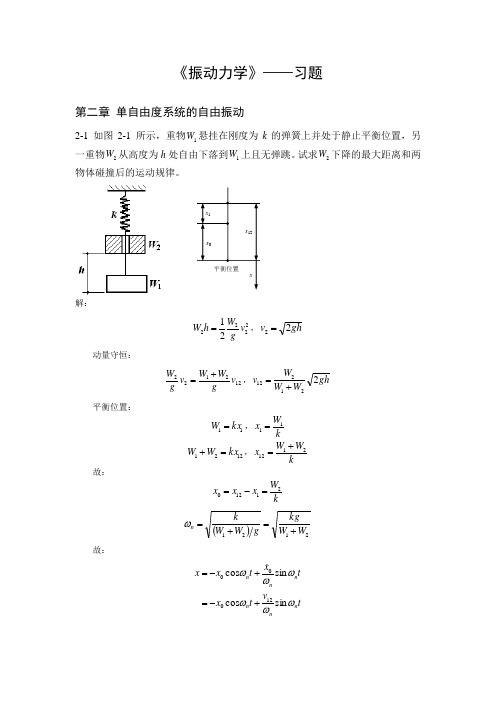
《振动力学》——习题第二章 单自由度系统的自由振动2-1 如图2-1 所示,重物1W 悬挂在刚度为k 的弹簧上并处于静止平衡位置,另一重物2W 从高度为h 处自由下落到1W 上且无弹跳。
试求2W 下降的最大距离和两物体碰撞后的运动规律。
解:222221v gW h W =,gh v 22=动量守恒:122122v gW W v g W +=,gh W W W v 221212+=平衡位置:11kx W =,kW x 11=1221kx W W =+,kW W x 2112+=故:kW x x x 21120=-= ()2121W W kgg W W k n +=+=ω故:tv t x txt x x n nn n nn ωωωωωωsin cos sin cos 12000+-=+-=xx 0x 1x 12平衡位置2-2 一均质等直杆,长为l ,重量为w ,用两根长h 的相同的铅垂线悬挂成水平位置,如图2-2所示。
试写出此杆绕通过重心的铅垂轴做微摆动的振动微分方程,并求出振动固有周期。
解:给杆一个微转角θ2aθ=h α2F =mg由动量矩定理:ah a mg a mg Fa M ml I M I 822cos sin 12122-=-≈⋅-====αθαθ其中12cossin ≈≈θααh l ga p ha mg ml n 22222304121==⋅+θθ g h a l ga h l p T n 3π23π2π222===2-3 一半圆薄壁筒,平均半径为R , 置于粗糙平面上做微幅摆动,如图2-3所示。
试求其摆动的固有频率。
图2-3 图2-42-4 如图2-4 所示,一质量m连接在一刚性杆上,杆的质量忽略不计,试求下列情况系统作垂直振动的固有频率:(1)振动过程中杆被约束保持水平位置;(2)杆可以在铅垂平面内微幅转动;(3)比较上述两种情况中哪种的固有频率较高,并说明理由。
图T 2-9 答案图T 2-9解:(1)保持水平位置:m kk n 21+=ω(2)微幅转动:mglllF2112+=mgl1l2xx2xx'mglll2121+=k2k1ml1l2()()()()()()()()()mgk k l l k l k l mgk k l l k l l k l l l k l mg k k l l k l k l l l l k l l mg l mgk l l l k l l l l l l k l l mg l l l l x x k F x x x 2122122212121221221121212221212211211121212122211211121221112111 ++=+-++=+-⋅+++=⎥⎦⎤⎢⎣⎡+-++++=+-+='+=故:()22212121221k l k l k k l l k e++=mk en =ω 2-5 试求图2-5所示系统中均质刚性杆AB 在A 点的等效质量。
大学物理第四章

则简谐振动的运动方程为 x 0.12cos(πt π/3)
4.1 简谐振动
, ,
,
,
例题讲解 2
一质点沿 x 轴做简谐振动,振幅 A 0.12 m ,周期 T 2 s 。当 t 0 时,质点对平衡位置的位移为 x0 0.06 m ,
此时,质点向 x 轴正向运动。求:① 此简谐振动的运动方程;② 从初始时刻开始第一次通过平衡位置的时刻。
机械振动
本章导读
振动与波动是非常普遍的运动形式,其中, 波动是以振动为基础的。
广义上讲,凡是描述物体运动状态的物理 量在某一数值附近的反复变化都可称为振动, 通常研究的振动都是周期性的。狭义上讲的振 动即为机械振动,是指物体在一定位置附近所 做的来回往复运动,它是自然界中的基本振动 形式之一,其基本规律也是研究其他形式的振 动及波动的基础。
4.1 简谐振动 , ,
4.1.2 描述简谐振动的物理量
振幅、周期、频率、角频率、相位及初相等都是描述简谐振动的物理量。
振幅
简谐振动的特征量
角频率 初相
可以完全确定一 个简谐振动。
4.1 简谐振动 , ,
4.1.2 描述简谐振动的物理量
1.振幅
在简谐振动的运动方程 x Acos(t ) 中,由于| cos(t ) | 1 ,所以,| x | A 。
弹簧振子的周期和频率都是由物体的质量m和弹簧的劲度系数k所决定的,即只与振动系统本身 的物理性质有关。
我们将这种由振动系统本身的性质所决定的周期和频率称为固有周期和固有频率。
4.1 简谐振动 , ,
4.1.2 描述简谐振动的物理量
3.相位与初相
在振幅 A 和角频率 都已知的情况下,由式可知,物体在某一时刻的运动状态由 t 决定,t 称为
第四章第1节 简谐振动的描述PPT课件

力学是研究机械运动规律的学科。
质点运动 刚体转动
振动 波动
振动的描述 振动的动力学方程 振动的能量 振动的合成 阻尼振动 受迫振动 共振
§4.1 简谐振动的描述
一 相关概念 振动:任何一个物理量在某一量值附近随时间作
周期性变化都可以称为该物理量的振动。 实例:
心脏的跳动,钟摆,乐器, 地震,电、磁场,电流等
相位表征任意时刻t,振子的运动状态。 和时间一一对应。 d
dt
初相表征初始时刻振子的运动状态。
1)质点的振动状态完全由相位确定
x =Acos( t+ )
dxAsin t()
dt
( t+ )=0, x=A,=0 —正最大
( t+ )在第1象限, x>0, < 0
( t+ )=+/2, x=0, <0 —平衡位置
例4.2 证明单摆的运动是简谐振动。
证单平明摆衡:: 值合附m力可近在看往切作复向质运方点动向,,分细且力线摆:质角量很和小伸。长可忽略,m在
Fmsgin 当 0时,有
转
A
动
sin
于是:
Fmg
0
正
0 l 向
FT m
由简谐振动定义,得证。
o
mg
r
例4.3 证明在稳定平衡位置附近的微小振动是简谐振动 证明:取平衡位置为原点,则原点位置受合力为零。
x
同相
A1
T t
A2 o - A2
-A1
x1 反相
T t
x2
例如 x1 =0.3cos( t )
x2 =0.4cos( t
机械振动:物体在一定位置作周期性往复机械运动 , 称为该物体的机械振动 。
大学物理 新 4 振动
v0 M
v m
x 解:(1).x处物块动力学方程
(m M ) d 2x dt 2
x (m M )g k( Mg x)
o
k
o = mg kx
正确解:(m
M)
d2x dt 2
(m
M
)g
k( m
M)g k
x=
kx
k T 2 M m
22
mM
t 0 : A Acos
2
3
v0 A sin 0
3
66
振动(Vibration)
t 1: x1 0, v1 0
x
A
3
2
0
t 1: 0 Acos( )
3
32
v1
A
sin(
3ቤተ መጻሕፍቲ ባይዱ
)
0
(2). 2
t T
t
2
t 0.5 5 5
6 12
A 1.0
dt
1。运动方程中各物理量
(1)周期、频率、角频率
周期T:完成一全振动所需的时间
x = Acos(ω t + ) = A cos ω (t + T )+
一个周期后位移相等,所以
ω T = 2π 11
振动(Vibration)
数学式
T 2
弹簧振子T 2 m /k
单 摆T 2 l /g
复摆T 2 J / mgh
P
x
33
振动(Vibration)
M
P
x
34
振动(Vibration)
M
P
x
35
河科大振动力学-第二章

非齐次微分方程 通解
=
齐次微分方程 通解
+
非齐次微分方程 特解
持续等幅振动
有阻尼自由振动 逐渐衰减
稳态解
稳态响应
瞬态解
瞬态响应
单自由度线性系统的强迫振动 系统的全解为:
x(t ) Cent cos(d t ) A H () cos(t )
有阻尼自由振动的解 瞬态解 瞬态响应 逐渐衰减 稳态振动的解 稳态解 稳态响应 持续等幅振动
描述了振动位移、激励间的相位差与激励频率之 间的函数关系,称之为相频特性。 下图为不同阻尼率时的相频特性曲线,图中横坐 标为 / n ,即频率比:
单自由度线性系统的强迫振动
单自由度线性系统的强迫振动 从相频特性曲线可以看到: (1)当 n 时, ( ) 0 ,即位移与激振力在相位 上几乎相同。
H (2)当 n 时, () 1 , 且 / n 时, () 0 H 说明高频响应的振幅很小。
单自由度线性系统的强迫振动 (3)当 n 和 n 时 对应于不同 值,曲线较为密集,说明阻尼的影响不显著
单自由度线性系统的强迫振动 (4)当 n 时, H () 出现峰值。阻尼率较大时,H ()
单自由度线性系统的强迫振动 从相频特性曲线可以看到: (2)当 n 时, () ,即位移与激振力在相位 上几乎相反。
单自由度线性系统的强迫振动 从相频特性曲线可以看到: (3)相位差随着频率比的增大而逐渐增大。阻尼对相 位差的影响表现为:当频率比<1时,相位差随阻尼率的增 大而增大;而当频率比>1时,相位差随阻尼率的增大而减 小。但当 n 时总有 / 2 ,这时相位差与阻尼率 值的大小无关。工程中常将 / 2 当做判断共振的依据 。
理论力学 第四章
(m
(m
2J r
2
) x kxx 0 x
) kx 0 x
2J r
2
--自由振动微分方程
系统的固有频率为
0
k r2 mr 2 2 J
§ 4-2 计算固有频率的能量法
如图所示无阻尼振动系统
当系统作自由振动时,运动规律为
x A sin(0t )
2
2
当圆柱体作微振动时, 可认为 sin
2
2
1 V mg ( R r ) 2 2
设系统作自由振动时θ的变化规律为 A sin(0 t )
3m 2 ( R r ) 2 0 A 2 则系统的最大动能 Tmax 4 1 2 系统的最大势能 Vmax mg ( R r ) A 2 由机械守恒定律 有 Tmax Vmax
2 0
k m
0
k m
0 只与表征系统本身特性的质量m和刚度k有关
而与运动的初始条件无关
它是振动系统固有的特性
所以称为固有角(圆)频率(一般也称固有频率) m=P/g
k P / st
0
g
0
k m
st
(2)振幅与初相角
x A sin( 0 t )
速度为
dx v 0 A cos(0t ) dt
在瞬时t 物块的动能为
1 2 1 2 T mv m0 A2 cos2 (0t ) 2 2
若选平衡位置为零势能点,有
1 2 V k[( x st ) 2 st ] Px 2
k st P
1 2 1 2 V kx kA sin 2 (0 t ) 2 2
振动力学课件
振动的基本理论
F(t)
f0
已知周期函数如图1-6所示 所示, 例1-1 已知周期函数如图 所示, 试对其作谐波分析 解: 0<t <π f
F (t ) = − f0
0
−2π
−π
π
2π
t
π < t < 2π
a0 =
an =
bn =
1
π
1
∫
0
2π
−f0
0
F (t ) dt = 0
图1-6 周期性矩形波 πbn
τ τ
2 2
试求图1-8所示的单个矩形脉冲的频谱图 例 1-2 试求图 所示的单个矩形脉冲的频谱图 τ 解: 0 − ∞ < t < −
− < t <
τ
2
2
E
τ
2
−
τ
2
t
< t < +∞
G (ω ) =
∫
τ
2
−τ 2
Ee − jω t dt =
+∞ −∞
2E
ω
sin
ωτ
2
jω t
图1-8 矩形脉冲示意图
An
ϕn
A1 A2
A3
ϕ1
ϕ2
ϕ3
ω1 2ω 1 3ω 1
nω1
ω 1 2 ω 1 3ω 1
nω 1
相位频谱图 幅值频谱图 频谱分析:利用频谱说明组成函数的简谐成分,反映该周期函 频谱分析:利用频谱说明组成函数的简谐成分 反映该周期函 数的特性方法。 数的特性方法。
10 太原科技大学应用科学学院
第一章
t 0
∞ − st 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.刚度矩阵的非主对角线元素 k i j 为直接联结在质量 m i 上和 质量 m j 上的所有弹簧刚性系数之和,取负值。 例如: k 1 2 k 2 3.刚度矩阵为对称矩阵。
k13 0
例如: k 1 2 k 2 1
k1 m1
2013年4月18日 c2 c1 《振动力学》
2013年4月18日 《振动力学》 16
4.3 线性变换与坐标耦合
4.3 线性变换与坐标耦合
对于无阻尼系统的运动方程
[ m ]{ } [ k ]{ x } { P ( t )} x
可以通过线性变换,将广义坐标转变为自然坐标。
{ } { 1 , 2 ..., n } 为系统的另一组广义坐标,有:
5
4.2 线性系统的运动方程及其矩阵表达式
刚度矩阵 [k] 中的元素 kij 是使系统仅在第 j 个坐标上产
生 单位位移而相应于第 i 个坐标上所需施加的力
k ij Q i qj 1 q r 0 ( r 1, 2 ..., n , r j )
例如
k11 Q1 k1 k 2 k 21 Q 2 k 2 k1 1
mL 0
2 2 2 0 1 m g L k a ka 2 2 2 m L 2 k a m gL ka
1 0 2 0
若有线性变换:
k3 m2 c3 m3 cn
k1 m1
k2
2013年4月18日 c2 c1 《振动力学》
kn
mn
8
4.2 线性系统的运动方程及其矩阵表达式
例1:双质量弹簧系统,两质量分别受到激振力 不计摩擦和其他形式的阻尼
P1(t) k1
m1
x1 k2
P2(t)
m2
x2 k3
试建立系统的运动微分方程
2013年4月18日 《振动力学》
x1 ( t ) { x} x 2 (t )
10
4.2 线性系统的运动方程及其矩阵表达式 P1(t) k1
m1
x1 k2
P2(t)
m2
x2
k3
刚度矩阵为:
k1 k 2 [k ] k2 k2 k3 k2
激励向量为:
P1 ( t ) { P ( t )} P2 ( t )
2 2
19
4.3 线性变换与坐标耦合
1 [u ] 1
1 1
1 [u ] 1
T
1 1
则:
2mL 0 T [ M ] [ u ] [ m ][ u ] 2 2mL 0
2
2m gL 0 [ K ] [ u ] [ k ][ u ] 0 2m gL
9
4.2 线性系统的运动方程及其矩阵表达式 P1(t) k1
m1
x1 k2
P2(t)
m2
x2
k3
直接写出矩阵形式的运动微分方程:
[ m ]{ } [ k ]{ x } { P ( t )} x
其中,质量矩阵为:
m1 0 [m ] m2 0
位移向量为:
2013年4月18日 《振动力学》
Q1
m1
k2 1
Q2
k1 m1
k2
m2
2013年4月18日 c2 c1 《振动力学》
k3 m3 c3
kn
mn cn
k2 1
m2
6
4.2 线性系统的运动方程及其矩阵表达式
图示系统,有以下规律:
1.刚度矩阵的主对角线元素 k i i 为联结在质量 m i 上的所有弹 簧刚性系数之和。
例如: k 1 1 k 1 k 2
第四章
多自由度系统振动的基本知识
多自由度系统振动的基本知识
教学内容
4.1 广义坐标 4.2 线性系统的运动方程及其矩阵表达式 4.3 线性变换和坐标耦合 4.4 无阻尼自由振动,特征值问题 4.5 模态向量的正交性和展开定理 4.6 系统对初始激励的响应
2013年4月18日 《振动力学》 2
4.1 广义坐标
T
{ N ( t )} [ u ] { P ( t )}
T
分别为广义坐标 { ( t )} 下的质量矩阵、刚度矩阵及力向量。
则有:
[ M ]{ ( t )} [ K ]{ ( t )} { N ( t )}
2013年4月18日 《振动力学》 18
4.3 线性变换与坐标耦合
例: 广义坐标 { ( t )} 下的系统运动方程为
T
{ x ( t )} [ u ]{ ( t )}
[ u ] 为nxn常数矩阵,则有:
{ ( t )} [ u ]{ ( t )} x
代入运动方程,则有:
[ m ] [ u ] } [ k ] [ u ] { } { P ( t ) } { 2013年4月18日
j 1 j 1
0
i 1, 2 ..., n
n
( t ) f f (t )
j 1 n
k ij u
j
2
( i 1, 2 .. ., n )
其中,刚度矩阵为:
2013年4月18日 《振动力学》
k 1 1 ... k 1 j ... k 1 n k 2 1 ... k 2 j ... k 2 n [k ] ..................... k n 1 ... k n j ... k n n
2013年4月18日 《振动力学》 4
4.2 线性系统的运动方程及其矩阵表达式
4.2 线性系统的运动方程及其矩阵表达式
x1 k1 m1 k2 x2 k3 x3 kn xn
m2 c2 c3
m3 cn
mn
c1
图示n自由度系统,取静平衡位置为原点,运动方程为: [ m ]{ } + [ c ]{ x } + [ k ]{ x } = { 0 } x 其中,[m],[c],[k]为n维矩阵,分别为质量矩阵,阻尼矩 阵和刚度矩阵。
k3 k3 k4 0
14
4.2 线性系统的运动方程及其矩阵表达式 k5 k1
m1 P1(t) P2(t)
k6
P3(t) m3
k2
m2
k3
k4
系统的运动方程为:
m1 0 0 0 m2 0 0 1 k 1 k 2 x 0 x k2 2 m 3 3 0 x k2 k2 k3 k5 k6 k3 x1 P1 ( t ) k3 x 2 P2 ( t ) P3 ( t ) k 3 k 4 x3 0
4.1 广义坐标
先看一个例子 图示双摆,质量m1, m2在平面摆动。 可以取四个直角坐标 ( x 1 , y 1 ) 来描述系统的运动。
x1 + y 1 = L1
2 2 2 2
1
x
L1
(x2 , y2 )
m1 ( x 1 , y 1 ) L2
但这四个直角坐标不独立,有:
2
2 2
( x 2 - x1 ) + ( y 2 - y 1 ) = L 2
y
因此,只有两个坐标独立。
m2 (x2 , y2 )
能完备的描述系统运动的一组独立的坐标叫广义坐标。 本例中,可选( x 1 , x 2 ) 作为广义坐标。 2013年4月18日 本例中,也可选( θ 1 , θ 2 ) 作为广义坐标。
《振动力学》
3
多自由度系统振动的基本知识
教学内容
4.1 广义坐标 4.2 线性系统的运动方程及其矩阵表达式 4.3 线性变换和坐标耦合 4.4 无阻尼自由振动,特征值问题 4.5 模态向量的正交性和展开定理 4.6 系统对初始激励的响应
1 { ( t )} 1 1 { ( t )} 1
计算变换以后的质量矩阵和刚度矩阵。 解:
mL [m ] 0
2013年4月18日 《振动力学》
2
0 2 mL
m gL ka ka [k ] 2 2 m gL ka ka
矩阵形式为:
2013年4月18日 《振动力学》
[ m ]{ } [ k ]{ x } { P ( t )} x
15
多自由度系统振动的基本知识
教学内容
4.1 广义坐标 4.2 线性系统的运动方程及其矩阵表达式 4.3 线性变换和坐标耦合 4.4 无阻尼自由振动,特征值问题 4.5 模态向量的正交性和展开定理 4.6 系统对初始激励的响应
k2
m2
k3 m3 c3
kn
mn cn
7
4.2 线性系统的运动方程及其矩阵表达式
4.阻尼矩阵和刚度矩阵规律相同。 例如: c 2 2 c 2 c 3
c 23 c3
5.取系统质心为坐标原点,则质量矩阵为对角矩阵。 例如:
m1 m2 [m ] m3 ... mn
《振动力学》
17
4.3 线性变换与坐标耦合
左乘 [ u ] T
[ u ] [ m ][ u ]{ } [ u ] [ k ][ u ]{ } [ u ] { P ( t )}
T T T
记
[ M ] [ u ] [ m ][ u ]
T
[ K ] [u ] [ k ][u ]
2013年4月18日 《振动力学》 13