大学物理动生电动势和感生电动势
动生电动势和感生电动势同时存在的试题解题策略
动生电动势和感生电动势同时存在的试题解题策略电动势的种类及其产生条件电磁感应的条件是闭合回路磁通量发生变化,即ΔΦ变化。
根据变化的情况,电动势可归为三种类型:1.动生电动势:当导体棒切割磁感线运动时,不改变磁感应强度B,但改变了导体棒的截面积S,产生的电动势为E=BLV。
2.感生电动势:当磁感应强度B发生变化时,不改变导体棒的截面积S,产生的电动势为E=n(ΔB/Δt)S。
3.动生电动势和感生电动势同时存在:当闭合回路或闭合回路中部分导体在磁场中做切割磁感线运动同时磁场变化时,产生的感应电动势大小为E=n(ΔΦ/Δt)=n[(S+B)ΔSΔB]/Δt。
其中nB=BLV为动生电动势,nS为感生电动势。
解决同时存在的电动势问题的方法对于第三种情况,两种电动势同时存在,解决问题比较复杂。
在近年的高考模拟试题中,常常出现导体棒切割磁感线的同时磁感应强度强弱也在发生变化的情况。
现介绍两种常用的方法:1.运用E=E1+E2=BLV+n数和。
应注意E1、E2的方向问题,当E1、E2方向相同时,取“+”;当E1、E2方向相反时,取“-”。
方向相同或相反指各自产生的感应电流在回路中流动方向情况。
2.运用E=n(ΔB/Δt)S解答。
即,分别计算出动生感应电动势和感生感应电动势,然后代入公式计算即可。
具体方法是:先任取t时刻,写出Φ(t)表达式,然后求导可得E=Φ'。
两种方式都应掌握,因为在不同的题目中,两种方法的繁简程度有区别。
例题解析题目描述:如图所示,两根平行金属导轨固定在水平桌面上,每根导轨每米的电阻为r=0.10Ω/m,导轨的端点P、Q用电阻可以忽略的导线相连,两导轨间的距离l=0.20m。
有随时间变化的匀强磁场垂直于桌面,已知磁感应强度B与时间t的关系为B=kt,比例系数XXX电阻不计的金属杆可在导轨上无摩擦地滑动,在滑动过程中保持与导轨垂直。
在t=0时刻,金属杆紧靠在P、Q端,在外力作用下,杆以恒定的加速度从静止开始向导轨的另一端滑动,求在t=6.0s时金属杆所受的安培力。
大学物理动生电动势和感生电动势

dt
S不变
dB Ek dl dS L S dt
dB dS S dt
揭示了电场和磁场是相互联系的。
10 - 2 动生电动势和感生电动势
第十三章电磁感应
dB Ek dl dS L S dt
dl Rd
2
b
d
vB dl
R
v
B
vBR
2
cos d
方向:a
vB2 R
b
a
10 - 2 动生电动势和感生电动势
第十三章电磁感应
二
感生电动势(阅读)
1、感生电动势 由于磁场发生变化 而激发的电动势
G S N
是什么力使电荷运 动而在电路中产生 电流的呢???
R
10 - 2 动生电动势和感生电动势
第十三章电磁感应
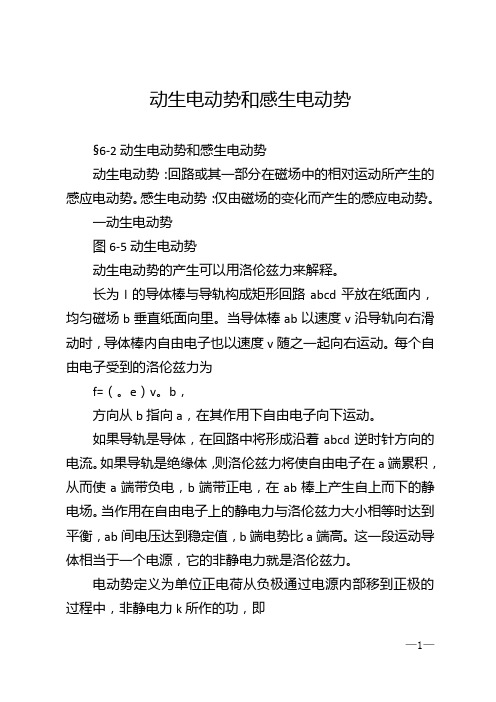
例5. 匀强磁场B,导体棒OP绕OZ轴旋转,角 速度 , OP=b, 为已知 OZ轴∥ B 。求PO两端的电势差?
思路:d ( v B ) dl
vB cos dl
rB sin d l
R
B
解:方法一 作辅助线,形成闭合回路
i 0 半圆 ab 2 RBv
方向:a
a
b
10 - 2 动生电动势和感生电动势
第十三章电磁感应
有一半圆形金属导线在匀强磁场中作切割磁
力线运动。已知: v , B , R.
求:动生电动势。 解:方法二
d ( v B ) dl 0 vB sin 90 dl cos
(D) 两环中感应电动势相等。
动生电动势和感生电动势
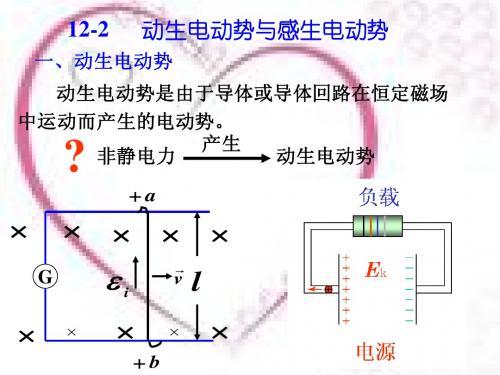
§6-2 动生电动势和感生电动势动生电动势:回路或其一部分在磁场中的相对运动所产生的感应电动势。
感生电动势:仅由磁场的变化而产生的感应电动势。
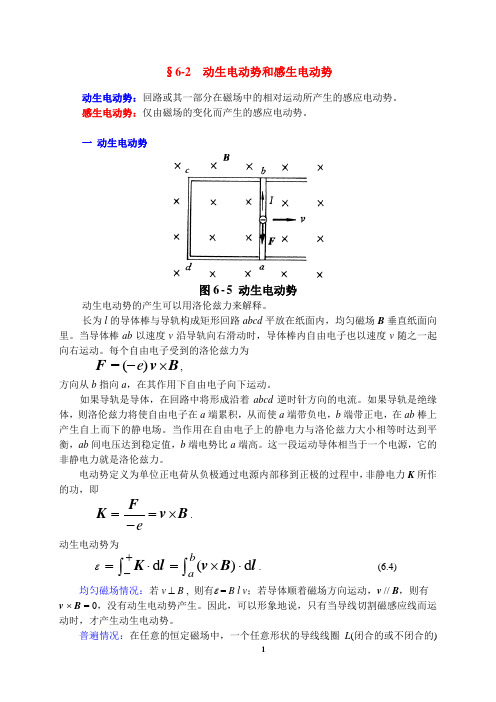
一 动生电动势图6 - 5 动生电动势动生电动势的产生可以用洛伦兹力来解释。
长为l 的导体棒与导轨构成矩形回路abcd 平放在纸面内,均匀磁场B 垂直纸面向里。
当导体棒ab 以速度v 沿导轨向右滑动时,导体棒内自由电子也以速度v 随之一起向右运动。
每个自由电子受到的洛伦兹力为B v F ⨯-)(=e ,方向从b 指向a ,在其作用下自由电子向下运动。
如果导轨是导体,在回路中将形成沿着abcd 逆时针方向的电流。
如果导轨是绝缘体,则洛伦兹力将使自由电子在a 端累积,从而使a 端带负电,b 端带正电,在ab 棒上产生自上而下的静电场。
当作用在自由电子上的静电力与洛伦兹力大小相等时达到平衡,ab 间电压达到稳定值,b 端电势比a 端高。
这一段运动导体相当于一个电源,它的非静电力就是洛伦兹力。
电动势定义为单位正电荷从负极通过电源内部移到正极的过程中,非静电力K 所作的功,即B v F K ⨯=-=e.动生电动势为ε⎰⎰+-⋅⨯=⋅=l B v l K d )(d ba .(6.4)均匀磁场情况:若v ⊥ B , 则有ε = B l v ;若导体顺着磁场方向运动,v // B ,则有 v ⨯ B = 0,没有动生电动势产生。
因此,可以形象地说,只有当导线切割磁感应线而运动时,才产生动生电动势。
普遍情况:在任意的恒定磁场中,一个任意形状的导线线圈L (闭合的或不闭合的)在运动或发生形变时,各个线元d l 的速度v 的大小和方向都可能是不同的。
这时,在整个线圈L 中产生的动生电动势为ε l B v d )()(⋅⨯=⎰L .(6.5)图6 - 6 洛伦兹力不作功洛伦兹力对电荷不作功:洛伦兹力总是垂直于电荷的运动速度,即v ⊥F v ,因此洛伦兹力对电荷不作功。
12.2 动生电动势和感生电动势
此时电荷积累停止, 两端形成稳定的电势差 两端形成稳定的电势差。 此时电荷积累停止,ab两端形成稳定的电势差。 洛仑兹力是产生动生电动势的根本原因 洛仑兹力是产生动生电动势的根本原因. 是产生动生电动势的根本原因
动生电动势的公式
非静电力
f = −e(v × B)
f 定义 Ek为非静电场强 Ek = = v ×B −e
S
A B ××× ×
ω ××v × ×
非均匀磁场
例 一直导线CD在一无限长直电流磁场中作 一直导线 在一无限长直电流磁场中作 切割磁力线运动。 切割磁力线运动。求:动生电动势。 动生电动势。 解:方法一
dε = ( v × B )⋅ dl I l dl µ0I 0 0 D sin90 dl cos180 =v C 2πl b a µ0vI dl =− 方向 D→C → 2πl µ0vI a+b dl µ0vI a + b ε =− ∫a l = − 2π ln a 2π
×××× ⊗ o ×××× B ×××× h
C
∂B ∂t
××
L
D
解:
ε i = ∫ E涡 • dl
L
r dB E涡 = 2 dt
dε = E涡 • dl r dB dl cosθ = 2 dt
h dB dl = 2 dt
⊗o
B
⊗
θ
∂B ∂t
E涡
r h
l dl
L
θ
C
D
h dB 1 dB εCD = ∫L dl = 2hL dt 2 dt
O
解:方法一 取微元
dε = ( v × B )⋅ dl
= Bvdl = Blωdl
εi = ∫ dεi = ∫0 Blωdl
动生电动势与感生电动势

【解】由于金属棒处在通电导线的非均匀磁场中,因此必
须将金属棒分成很多长度元dx,规定其方向由A指向B。这样 在每一dx处的磁场可以看作是均匀的,其磁感应强度的大小为
B 0I
2x
根据动生电动势的公式可知,dx小段上的动生电动势为
d动
(v
B)
dl
Bv
cos
dx
0I
2x
vdx
由于所有长度元上产生的动生电动势的方向都相同,所以金
d
dt
d dt
S
B
dS
又根据电动势的定义可得
L EK dl
式中,EK为感生电场的电场强度。感生电场的电场强度是 非静电性场强。
则有
L EK
dl
d dt
B dS B dS
s
s t
dB
s
S t
若闭合回路是静止的,即所包围面积S不随时间变化,即
S 0 ,则上式可写成
t
B L EK dl s t dS
性场强为
Ek
fL (e)
vB
根据电动势的定义可得,动生电动势为
a
动
L Ek
dl
(v B) dl
b
上式是动生电动势的一般表达式。由上式可知,动生电动势
的方向是非静电性场强 Ek v B 在运动导线上投影的指向。
【例9-2】如下图所示,长直导线 中通有电流I=10A,有一长l=0.1m的 金属棒AB,以v=4m·s-2的速度平行于 长直导线作匀速运动,棒离导线较近的 一端到导线的距离a=0.1m,求金属棒 中的动生电动势。
1861年,英国物理学家麦克斯韦提出感生电场的假设,认为 由于磁场变化而产生一种电场,是这个电场使导体中自由电子作 定向运动而形成电流。麦克斯韦还认为,即使没有导体,这种电 场同样存在。这种由变化磁场激发的电场称为感生电场。
动生电动势和感生电动势
动生电动势和感生电动势§6-2动生电动势和感生电动势动生电动势:回路或其一部分在磁场中的相对运动所产生的感应电动势。
感生电动势:仅由磁场的变化而产生的感应电动势。
一动生电动势图6-5动生电动势动生电动势的产生可以用洛伦兹力来解释。
长为l的导体棒与导轨构成矩形回路abcd平放在纸面内,均匀磁场b垂直纸面向里。
当导体棒ab以速度v沿导轨向右滑动时,导体棒内自由电子也以速度v随之一起向右运动。
每个自由电子受到的洛伦兹力为f=(。
e)v。
b,方向从b指向a,在其作用下自由电子向下运动。
如果导轨是导体,在回路中将形成沿着abcd逆时针方向的电流。
如果导轨是绝缘体,则洛伦兹力将使自由电子在a端累积,从而使a端带负电,b端带正电,在ab棒上产生自上而下的静电场。
当作用在自由电子上的静电力与洛伦兹力大小相等时达到平衡,ab间电压达到稳定值,b端电势比a端高。
这一段运动导体相当于一个电源,它的非静电力就是洛伦兹力。
电动势定义为单位正电荷从负极通过电源内部移到正极的过程中,非静电力k所作的功,即k。
f。
e。
v。
b.动生电动势为。
k。
dl。
a(v。
b)。
dl.b(6.4)均匀磁场情况。
若v。
b,则有。
=blv;若导体顺着磁场方向运动,v。
b,则有v。
b=0,没有动生电动势产生。
因此,可以形象地说,只有当导线切割磁感应线而运动时,才产生动生电动势。
普遍情况:在任意的恒定磁场中,一个任意形状的导线线圈l(闭合的或不闭合的)1在运动或发生形变时,各个线元dl的速度v的大小和方向都可能是不同的。
这时,在整个线圈l中产生的动生电动势为。
(v。
b)。
dl.(l)(6.5)图6-6洛伦兹力不作功洛伦兹力对电荷不作功。
洛伦兹力总是垂直于电荷的运动速度,即fv。
v,因此洛伦兹力对电荷不作功。
然而,当导体棒与导轨构成回路时会有感应电流出现,这时感应电动势却是要作功的。
感应电动势作功能量的来源。
在运动导体中的自由电子不但具有导体本身的运动速度v,而且还具有相对于导体的定向运动速度u,与此相应的洛伦兹力fu。
感生、动生电动势
v dx
v 和 B 的夹角: θ1 = π / 2, V × B 与dx 的夹 的夹角:
二、动生电动势
r r r r r r fL r 由 f L = − e ( v × B ) 得: E k = =v×B −e + r r + r r r 代入 ε = ∫ Ek ⋅dl 得: ε = ∫ ( v × B ) ⋅d l
−
−
大小: 大小: ε =
r r − θ 1为 v与B的夹角; 的夹角;
dε i = E感dl cos θ
× × × × × × R × × × × × × × o h× × × r × θ × × ×θ B dl × L ×
r dB E感 = 由上题结果, 由上题结果,圆形区域内部的感生电场: 圆形区域内部的感生电场: 2 dt
−
ε i = ∫ dε i = ∫ E感dl cosθ
∫
L
动生电动势的求解可以采用两种方法: 动生电动势的求解可以采用两种方法:一是利用 一是利用 “动生电动势”的公式来计算; 的公式来计算;二是设法构成一种合理 的闭合回路以便于应用“法拉第电磁感应定律”求解。 求解。
三、应用动生电动势的解题方法
公式: 公式: ε
= ∫ vBdl sin θ1 cosθ 2
∫ vB dl sin θ
+
1
r r r θ 2为 v × B 与 d l 的夹角。 的夹角。
cos θ 2
方向: 方向:电动势方向从负极到正极。 电动势方向从负极到正极。 以上结论普遍成立。 以上结论普遍成立 。 如果整个回路都在磁场中运动, ,则在回路中产生的总 如果整个回路都在磁场中运动 r r r 的电动势为: 的电动势为: ε = ( v × B ) ⋅ d l
动生电动势和感生电动势
Ek
1 2
B t
r
1 2
kr
2. r > R 区域
作半径为 r 的环形路径,并以逆
时针为回路绕向,则同理有
2rEk
S
B t
ds
R2k
R
o
r
r
B
1 B R2 1 R2
Ek 2 t
r
k 2r
Foundation - SJYGGF
§ 13.2 动生电动势和感生电动势
Nov 5, 2002 9/33
随时间均匀增加, dB k dt
若铝圆盘的电导率为γ,求盘内 的感应电流。
见书P212页,例4
R
解: 取半径为r、宽为dr的圆环微 元,并以逆时针方向为正方向,则 微元环中元电动势为
d L Ek dl L Ek dl
1 kr 2r dl kr2
20
o
r
dr
B
微元环中的电阻为 dR 1 2r hdr
Foundation - SJYGGF
§ 13.2 动生电动势和感生电动势
Nov 5, 2002 21/33
4) 电度表记录电量
电度表记录用电量,就是
利用通有交流电的铁心产生交
变的磁场,在缝隙处铝盘上产
o
生涡电流,涡电流的磁场与电
磁铁的磁场作用,表盘受到一
转动力矩,使表盘转动。
o’
Foundation - SJYGGF
感生电动势
1. 感生电动势——回路不动或不变,因磁场随时间变 化产生的电动势。相应的电流称为感生电流。
2. 感生电动势的起源——感生电场Ek 1) Maxwell感生电场(涡旋电场)假设
Maxwell 1861年首先从理论上预言感生电场的存在,后 被Hertz的电磁波实验所证实。Maxwell假设: 变化的磁场要在其周围空间激发一种电场——感生电场
感生电动势和动生电动势
100W优质文档免费下 载
VIP有效期内的用户可以免费下载VIP免费文档,不消耗下载特权,非会员用户需要消耗下载券/积分获取。
ቤተ መጻሕፍቲ ባይዱ
部分付费文档八折起 VIP用户在购买精选付费文档时可享受8折优惠,省上加省;参与折扣的付费文档均会在阅读页标识出折扣价格。
在这种电场力的作用下定向移动,产生感应 电流,或者说产生感应电动势.变化的的磁
场能在周围空间激发电场,这种电场叫感应 电场,由感生电场产生的感应电动势称为感 生电动势.
感生电动势在电路中的作用就是 电源,其电路就是内电路,当它与 外电路连接后就会对外电路供电.
感应电场是产生感应电流或感应电动势 的原因,感应电场的方向同样可由楞次定 律判断.
X X CX
伦兹力为F洛=QVB,F洛方向向上,正 X X XF洛 电荷向上运动,使导体下端出现负电 X XL X V 荷,结果上端C的电势高于下端D的 X X XF电 电势,出现由C指向D的静电场,此时 X X DX 电场对正电荷的作用力是向下,与洛 伦兹力方向相反,当二力互相平衡时, CD两端随时随地彰显尊贵身份。
专属客服
VIP专属客服,第一时间解决你的问题。专属客服QQ:800049878
路漫部权益:1.海量精选书免费读2.热门好书抢先看3.独家精品资源4.VIP专属身份标识5.全站去广告6.名
VIP专享文档下载特权自VIP生效起每月发放一次, 每次发放的特权有效期为1个月,发放数量由您购买 的VIP类型决定。
每月专享9次VIP专享文档下载特权, 自VIP生效起每月发放一次,持续有 效不清零。自动续费,前往我的账号 -我的设置随时取消。
服务特 权
共享文档下载特权
《大学物理》6.2动生电动势感生电动势解读
b
B B 1 2 dS 解: bc R S t t 2
B 0 t
× ×
O × × × ×
uc ub
a
× ×
上页
b E c
下页
四、涡电流
产生原因: 大块的金属导体处在变化的磁场中时,通过金属 块的磁通量发生变化,从而产生感应电动势,在 金属内部形成电流,称为涡电流。 涡电流特点:
A
G
E
B
。。
下页
如何度量这种本领? ε----电动势
上页
电动势: 电源把单位正电荷经内电路从 负极移到正极的过程中,非静 电力Fk所作的功 从场的观点: 非静电力对应非静电场
A非 q
q
E0
Fk qEk A非 Fk dl q Ek dl Ek dl
d 1.热效应: i dt
I
i
R
I(ω)
Q I 2 Rt 2
表明: 交流电频率越高发热越多——感应加 热原理
I(ω)
I(ω) I(ω)
I’
2.磁效应: 阻尼摆
上页 下页
小结:
动生电动势:磁场分布不变, 回路或导线在磁场中运动而引起的感应电动
势 感生电动势:导体回路不动,磁场随时间发生变化而引起的感应电动势
静电场
静止电荷
涡旋电场
变化磁场
有源场
无源场
上页 下页
感生电动势的计算 法拉第电磁感应定律
i
L
d d Ek dl
dt
dt
S B d S
因为回路固定不动,磁通量的变化仅来自磁场的变化
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
+
10 - 2 动生电动势和感生电动势
非静电力 Fk qEk
电源的电动势:
第十三章电磁感应
E k 为非静电场的场强
+ + + + + + + A + +
在电源内将单位正电荷 从负极移动到正极的过程 中非静电力所作的功
_
Ek dl
A
Fk
方向: B
U A UB
OC、CA段没有动生电动势
S
S
B
O C
v A
10 - 2 动生电动势和感生电动势
第十三章电磁感应
问 把铜棒换成金属圆盘, 题 中心和边缘之间的电动势是多少?
无数铜棒一端在圆心, 另一端在圆周上。
B
1 2 U B R 2
o
o
10 - 2 动生电动势和感生电动势 第十三章电磁感应 B dS 引起磁通量变化的两种情况: S 闭合回路的任一部分在磁 B 不随时间变化, 而由
闭合回路的整体或部分在 恒定磁场中运动而产生的 电动势-动生电动势
场中都不运动,而由 B 随
时间变化而产生的电动势 S -感生电动势
(D) 两环中感应电动势相等。
只要存在变化的磁场,哪怕不存在导 体回路,也一定有感生电场产生
10 - 2 动生电动势和感生电动势
第十三章电磁感应
四. 电子感应加速器
电子感应加速器是利用涡旋电场来加速电子的 一种设备。
铁芯
线圈
电子束
环形真空 管 道
真空室内激发涡旋电场
10 - 2 动生电动势和感生电动势
电场力 洛仑兹力
不存在 不存在
只可能是一种新型的电场力
10 - 2 动生电动势和感生电动势
第十三章电磁感应
1861年,麦克斯韦提出了感生电场的假设 变化的磁场在周围空间要激发电 场,称为感生电场。感生电流的产 生就是这一电场作用于导体中的自 由电荷的结果。
感生电场充当着产生感应电动势 的非静电力。
10 - 2 动生电动势和感生电动势
第十三章电磁感应
一般情况
导线上各长度元 dl上的速度 v 、 B 各不相同
导线是曲线 , 磁场为非均匀场。
dl 上的动生电动势 d (v B ) dl
整个导线L上的动生电动势
d
L
(v B ) dl
S
dt
S不变
dB Ek dl dS L S dt
dB dS S dt
揭示了电场和磁场是相互联系的。
10 - 2 动生电动势和感生电动势
第十三章电磁感应
dB Ek dl dS L S dt
d (v B) dx I x dx 0 I 0 0 v sin 90 dx cos 180 0 D C vB 2x x b a 0vI dx 2x 方向 D C 0vI a b dx 0vI a b ln 2 a 2 a x
O
L
v
B
BvL sin
10 - 2 动生电动势和感生电动势
第十三章电磁感应
BvL sin
特例
L
B
v
v
B
v
B
0
BvL
10 - 2 动生电动势和感生电动势
第十三章电磁感应
非均匀磁场
例3
平动
一直导线CD在一无限长直电流磁场中作
切割磁力线运动。求:动生电动势。 解:方法一
d Bldl
0
v A B v B O l dl
1 BL2 2
方向 A O
10 - 2 动生电动势和感生电动势
第十三章电磁感应
方法二 作辅助线,形成闭合回路OACO m B dS BdS
1 BSOACO BL2 2 d 1 2 d i BL 2 dt dt 1 BL2 2 负号表示方向沿AOCA
N
b B
c
v
a d
10 - 2 动生电动势和感生电动势
第十三章电磁感应
补充:电动势(electromotive force)的概念
+
+
+
+ + + + A + +
Fk
U A UB
+ - B -
外电路:正电荷在静 电场力的作用下从高 电势向低电势运动。 内电路:正电荷在非 静电力的作用下从低 电势向高电势运动。
平动 转动
方 法
(v B) dl
L
10 - 2 动生电动势和感生电动势
第十三章电磁感应
步骤:
dm dt
1) 约定 2)求磁通
(v B) dl
b a
取线元 dl ,并规定其方向 右旋 1) 2) 写出 d (v B) dl 3)确定积分范围,并积分
2
B
Z
v r
P
vB
B l sin dl 1 2 2 B l sin 2
O
10 - 2 动生电动势和感生电动势
第十三章电磁感应
课 堂 练 习
例 有一半圆形金属导线在匀强磁场中作切割磁
力线运动。已知: v , B , R.
求:动生电动势。
b
v
dl Rd
2
b
d
vB dl
R
v
B
vBR
2
cos d
方向:a
vB2 R
b
a
10 - 2 动生电动势和感生电动势
第十三章电磁感应
二
感生电动势(阅读)
1、感生电动势 由于磁场发生变化 而激发的电动势
G S N
是什么力使电荷运 动而在电路中产生 电流的呢???
R
10 - 2 动生电动势和感生电动势
第十三章电磁感应
例5. 匀强磁场B,导体棒OP绕OZ轴旋转,角 速度 , OP=b, 为已知 OZ轴∥ B 。求PO两端的电势差?
思路:d ( v B ) dl
vB cos dl
rB sin d l
10 - 2 动生电动势和感生电动势
第十三章电磁感应
L
(v B ) dl
此式为动生电动势公式,也是发电机发电的最 基本公式。
10 - 2 动生电动势和感生电动势
第十三章电磁感应
(二)动生电动势的计算
计 算 动 生 电 动 势
分 类
均匀磁场
非均匀磁场
dm dt
dB 是面元ds处磁感应 dt
式中负号表示感生电 场与磁场增量的方向 成左手螺旋关系。
强度随时间的变化率
E感
B t
只要存在变化的磁场, 就一定有感生电场
10 - 2 动生电动势和感生电动势
第十三章电磁感应
感生电场和静电场的对比
E静 和 Ek 均对电荷有力的作用.
静电场是保守场
d Φ 闭合回路中的感生电动势 E dl L k dt
10 - 2 动生电动势和感生电动势
第十三章电磁感应
闭合回路中的感生电动势 E dl dΦ L k dt d Φ B dS L Ek dl SB dS
L
E 静 dl 0
dΦ 感生电场是非保守场 L Ek dl dt 0
静电场由电荷产生;感生电场是由变化的磁 场产生 .
10 - 2 动生电动势和感生电动势
第十三章电磁感应
例:将磁铁插入非金属环中,环内有无感 生电动势?有无感应电流? S 解:
dB Ek dl dS L S dt
第十三章电磁感应
利用涡旋电场对电子进行加速
f
3)根据公式计算
若结果 0, 则
说明 实 与
相反
说明 实与 dl 相反
若结果 0, 则
10 - 2 动生电动势和感生电动势
第十三章电磁感应
均匀磁场
平动
例1 一矩形导体线框,宽为 l ,与运动导体棒构成闭合 回路。如果导体棒以速度 v 作匀速直线运动,求回路内 的感应电动势。 b 解: 方法一:
第十三章电磁感应
方法二:根据电磁感应定律解
经过时间t:
0 Blvt
d Blv dt
电动势方向 ab
b
l
a
v
vt
10 - 2 动生电动势和感生电动势
10 - 2 动生电动势和感生电动势
第十三章电磁感应
例4 如图,长为L的铜棒在磁感应强度为 B
求:棒中感应电动势的大小 和方向。
均匀磁场
转动
的均匀磁场中,以角速度 绕O轴转动。 取微元
d ( v B ) dl
L
解:方法一
Bvdl cos 180 Bldl