《大学物理》动生电动势 (1)
合集下载
大学物理——动生电动势

v
I a
x L
dx
B
x
v和 B 的夹角: 1 / 2, V B 与 dx 的夹 2
角: 导体元所产生的动生电动势方向沿 x轴负向,
0 I B 导体元处的磁场 B 为: 2 x
d i vBdx sin cos vBdx 大小为: 2
代入
Ek dl 得: (v B) dl
大小:
1为 v 与 B 的夹角
vBdl sin 1 cos 2
2为 v B 与 dl
的夹角。
方向:电动势方向从负极到正极。 以上结论普遍成立。
如果整个回路都在磁场中运动,则在回路中产生的总 的电动势为: (v B) dl
E感
R dB 2 dt
dB 2 E 感 2r R dt R 2 dB 1 所以 E 感 2r dt r
o
R
r
17
E感分布曲线
例2:圆形均匀分布的磁场半径为 R,磁场随时间均匀
dB k ,在磁场中放置一长为 L 的导体棒,求 dt 棒中的感生电动势。 解: R E感作用在导体棒上,使导体
L
E静 dl 0
E E静 E感
B 在稳恒条件下,一切物理量不随时间变化, 0 t 静电场的环路定理 E dl 0
L
15
dB 增加 k ,求空间的感生电场的分布情况。 dt 解: 由于磁场均匀增加,圆形磁场区 R 域内、外 E感 线为一系列同心圆; 1. r < R 区域: 作半径为 r 的环形路径; o r 设涡旋电场的绕向也为逆时针方向。 B dB B E感 dl S t dS S dt dS
11-2动生电动势

v v
方法二
作辅助线,形成闭合回路 作辅助线,形成闭合回路CDEF
r r Φ = ∫ B• dS =
S
∫
a+b
a
εi = −
µ0 Ix a + b ln = 2π a dΦ
dt
µ0 I xdr 2πr
I
方向
D→C →
v v
X
µ0 I a + b dx ln ) = −( 2π a dt µ0 Iv a + b ln =− 2π a
均匀磁场
转动
r 如图,长为L的铜棒在磁感应强度为 例 如图,长为 的铜棒在磁感应强度为 B
求:棒中感应电动势的大小 和方向。 和方向。
的均匀磁场中, 轴转动。 的均匀磁场中,以角速度 ω 绕O轴转动。 轴转动
ω ××××
×××× ××××
O
r A B××× ×
解:方法一
v v v 取微元 dε = ( v × B )⋅ dl
a
+++ + +
r v v f = −e(v × B)
非静电力 它驱使电子沿导线由a向 移动 移动。 它驱使电子沿导线由 向b移动。
v B v v
r f
b
端出现过剩负电荷, 由于洛仑兹力的作用使 b 端出现过剩负电荷, a 端出现过剩正电荷 。
v 在导线内部产生静电场 E
方向a→ 方向 →b 电子受的静电力
S
v S 的法线方向应选得与曲线 L
的积分方向成右手螺旋关系
S
L
v ∂B 是曲面上的任一面元上磁感应强度的变化率 ∂t
不是积分回路线元上的磁感应强度的变化率
大学物理之动生电动势和感生电动势

13
12.2 动生电动势和感生电动势
第12章 电磁感应
感应电动势做功,洛伦兹力不做功?
rr F ⋅V
r =(f +
r f
'
)
⋅
(vr
+
vr'
)
=
r f
⋅vr'+
fr'⋅vr
= −evBv '+ev ' Bv
Fr
r f'
−e
vrr' f
r B vr
Vr
=0
洛伦兹力做功为零。
14
12.2 动生电动势和感生电动势
=
1 2
Bθ L2
回路中的电动势
ω
εi
=
−
dΦm dt
= − 1 BL2 dθ 2 dt
= − 1 BωL2 2
方向由楞次定律确定:
A
θ
o
C
r B
方向沿 A→O AC 、CO段没有动生电动势 25
12.2 动生电动势和感生电动势
第12章 电磁感应
例:法拉第电机。设铜盘的半径为 R,角速度为ω。 求:盘上沿半径方向产生的电动势。
423) ) )求 确 确导 定 定线vrvr元和× 上BBvr的与的电夹d动lr角的势θ夹d1,ε角=θ(2vr,
×
r B
)
⋅
r dl
dl υ -a
∫ 5)由动生电动势定义求解。ε =
+
vBdl
若 6)ε动> 生0,电则动ε势的的方方向向与:dlrr 若ε < 0,则 ε 的方向与 dl
−
同向; 反向。
动生电动势,等于从起点到终点的直导线所产 生的动生电动势 。
12.2 动生电动势和感生电动势
第12章 电磁感应
感应电动势做功,洛伦兹力不做功?
rr F ⋅V
r =(f +
r f
'
)
⋅
(vr
+
vr'
)
=
r f
⋅vr'+
fr'⋅vr
= −evBv '+ev ' Bv
Fr
r f'
−e
vrr' f
r B vr
Vr
=0
洛伦兹力做功为零。
14
12.2 动生电动势和感生电动势
=
1 2
Bθ L2
回路中的电动势
ω
εi
=
−
dΦm dt
= − 1 BL2 dθ 2 dt
= − 1 BωL2 2
方向由楞次定律确定:
A
θ
o
C
r B
方向沿 A→O AC 、CO段没有动生电动势 25
12.2 动生电动势和感生电动势
第12章 电磁感应
例:法拉第电机。设铜盘的半径为 R,角速度为ω。 求:盘上沿半径方向产生的电动势。
423) ) )求 确 确导 定 定线vrvr元和× 上BBvr的与的电夹d动lr角的势θ夹d1,ε角=θ(2vr,
×
r B
)
⋅
r dl
dl υ -a
∫ 5)由动生电动势定义求解。ε =
+
vBdl
若 6)ε动> 生0,电则动ε势的的方方向向与:dlrr 若ε < 0,则 ε 的方向与 dl
−
同向; 反向。
动生电动势,等于从起点到终点的直导线所产 生的动生电动势 。
第19讲动生电动势与感生电动势
解:由 B 0, 与B同向 感生电场沿逆时针。 t
取逆时针回路, r < R 时
l Ei dl
B dS S t
l
Ei
dl
cos
0
B t
dS
cos
Ei
2
r
dB dt
r2
r dB Ei 2 dt
××××× ×××××××
r × × × × × × ×
×××××××
×R× × × × B
r > R时,
3. 动生电动势的计算
作为电源的这段运动导体杆,其中的洛仑兹力 是非静电力。
非静电力 对应的非静电场强 由电动势定义
Fk e(v B)
Ek
Fk e
v
B
i Ek dl
运动导线ab产生的动生电动势为
i
(v B) dl
l
例题1 有一半圆形金属导线在匀强磁场中作切 割磁力线运动。已知 v, B, R. 求动生电动势.
解:
d (v B)dl
dl Rd v B
vB sin900 dl cos
2
vBR cos d 2 vB2R 有效段!
b dl
d
v
0:与假定的方向相同
R
B
方向:a b
a
例题2 如图,长为L 的铜棒在匀强磁场中以角速度 ω绕 o 轴转动。求:棒中感应电动势的大小 和方向。
解:取如图所示微元(此微元暗示了假定的正方向)
C × × ×O× ×
B t
Ei Dx
L
d Ei dx cos
r dB dx cos
2 dt
r dB Ei 2 dt
逆时针
r cos h
电磁感应——动生电动势总结
b a
b
εi
3、应用计算式计算在磁场中运动导线上的动生电动势
K K 速度也可以不同, v、 B
在一般情况下,磁场可以不均匀,导体在磁场中运动时各部分的
K 和 l 也可以不相互垂直,在这些情况下计算
运动导体内产生的总动生电动势应采取这样的步骤:
K K 先以一端为起点,在位置 l 处选取线元 dl ,计算线元上产生的动
生电动势;进而对整个处于磁场中的运动导体部分作积分,得到
总动生电动势。
K K K dε 动 = (v × B ) ⋅ d l
ε动 = ∫
L
L
K K K (v × B ) ⋅ d l
对于闭合回路
ε 动 为正时,表示电动势 为负。因此,由上式算出的电动势有正负之分, K K ε 动 为负时,则表示电动势的方向逆着dl 的方向。 方向顺着 dl 的方向;
a
K v
K B
b
K f
K K u fb 1
K K u +v
K K K K P = ( f1 + f2 ) ⋅ (v + u ) K K K K K = (−ev × B − eu × B) ⋅ (v + u ) = −evBu + euBv = 0
总洛仑兹力与总速 度垂直,不做功!
讨 论
(2)回路中的电能从何而来?
ε动的正负来判断电动势的方向。
实验演示
3、动生电动势产生过程中的能量转换
每个电子受的洛仑兹力
K B⊗
K f2
a
−eK uFra bibliotekK K K f l = f1 + f 2 K K K f1 = − ev × B
K f1 K f2
大学物理 马文蔚 课堂笔记15

已知 R, h, , B, dB/dt, 求 I 解 如图取一半径为r ,宽度为dr的圆环, 则
dB dB i E k dl dS dS L S dt S dt dB 因 和 S 平行 dt
圆环中的感生电动势的大小为
R
h
B
L
+ +
1 BL2 2
上海师范大学
i 方向
(点 P 的电势高于点 O 的电势) 4 /15
例2 一导线矩形框的平面与磁感强度为 B 的均匀磁场相垂直.在此矩形框
上,有一质量为 m 长为
§8.2
动生电动势和感生电动势
其值较之导线的电阻值要大得很多. 若开始时, 细导体棒以初速度 v0 沿如图
场方向垂直的平面上绕棒的一端转动;
解 如图所示,铜棒绕O点转动,
线元上产生的动生电动势为
+ + +
+ + + +B+ + + + +
d i ( v B) dl vBdl
L
整段铜棒上的电动势为
o v + + +
+ + O P
i
0
vBdl 0 lBdl
上海师范大学
14 /15
§8 -3
自感和互感
例1 如图是一长直密绕螺线管,长度为l, 横截面积为S, 线圈的总匝数为N,
管中均匀磁介质的磁导率为, 试求其自感L. (忽略边缘效应)
解 一般方法: 先设通有电流 I
螺线管密度(单位长度的线圈数) n=N/l,
求得 B
大学物理Ⅱ2.1 动生电动势
磁力线运动。已知: v, B, R.
求:动生电动势。
dl Rd
vB
解:方法一
d
(
v
B
)
dl
vBdl cos
2
vBR cosd 2 vB2R 方向:a b
b
dl
d
v
R
B
a
动生电动势
第十一章 电磁感应 电磁场
解:方法二
b
作辅助线,形成闭合回路
i 0
v
半圆
ab
2RBv
动生电动势
第十一章 电磁感应 电磁场
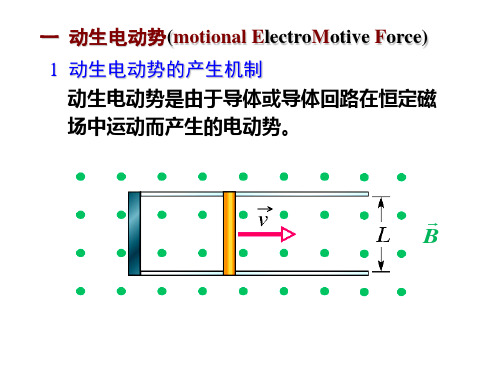
1、在磁场中运动的导线内的感应电动势
由于导体运动而产生的感应电动势,称为动生
电动势。
dΦ B d S Bl d x
i
dΦ dt
Bl d x
dt
D
A
v
B l
C B dx
Blv
动生电动势
第十一章 电磁感应 电磁场
解
i
b (v B) dl
a
b
vBdl
a
B
vB(ab) 2vB R2 r2
O
v
R
r dl
b
a
动生电动势
第十一章 电磁感应 电磁场
2.在磁场中转动的线圈内的感应电动势
设矩形线圈ABCD
o
的匝数为N ,面积为S, 使这线圈在匀强磁场中
绕磁直的间固感。夹B,定应当角的 强 为与时轴 度 零t 之,t线 ,与间0经OenO与的过B轴转夹时之eB垂动角n O间O,
Bv sin dl
0L Bv sin dl
BvLsin
dl
v
L
B
动生电动势 典型结论
动生电动势与感生电动势
【解】由于金属棒处在通电导线的非均匀磁场中,因此必
须将金属棒分成很多长度元dx,规定其方向由A指向B。这样 在每一dx处的磁场可以看作是均匀的,其磁感应强度的大小为
B 0I
2x
根据动生电动势的公式可知,dx小段上的动生电动势为
d动
(v
B)
dl
Bv
cos
dx
0I
2x
vdx
由于所有长度元上产生的动生电动势的方向都相同,所以金
d
dt
d dt
S
B
dS
又根据电动势的定义可得
L EK dl
式中,EK为感生电场的电场强度。感生电场的电场强度是 非静电性场强。
则有
L EK
dl
d dt
B dS B dS
s
s t
dB
s
S t
若闭合回路是静止的,即所包围面积S不随时间变化,即
S 0 ,则上式可写成
t
B L EK dl s t dS
性场强为
Ek
fL (e)
vB
根据电动势的定义可得,动生电动势为
a
动
L Ek
dl
(v B) dl
b
上式是动生电动势的一般表达式。由上式可知,动生电动势
的方向是非静电性场强 Ek v B 在运动导线上投影的指向。
【例9-2】如下图所示,长直导线 中通有电流I=10A,有一长l=0.1m的 金属棒AB,以v=4m·s-2的速度平行于 长直导线作匀速运动,棒离导线较近的 一端到导线的距离a=0.1m,求金属棒 中的动生电动势。
1861年,英国物理学家麦克斯韦提出感生电场的假设,认为 由于磁场变化而产生一种电场,是这个电场使导体中自由电子作 定向运动而形成电流。麦克斯韦还认为,即使没有导体,这种电 场同样存在。这种由变化磁场激发的电场称为感生电场。
《大学物理》6.2动生电动势感生电动势解读
k
b
B B 1 2 dS 解: bc R S t t 2
B 0 t
× ×
O × × × ×
uc ub
a
× ×
上页
b E c
下页
四、涡电流
产生原因: 大块的金属导体处在变化的磁场中时,通过金属 块的磁通量发生变化,从而产生感应电动势,在 金属内部形成电流,称为涡电流。 涡电流特点:
A
G
E
B
。。
下页
如何度量这种本领? ε----电动势
上页
电动势: 电源把单位正电荷经内电路从 负极移到正极的过程中,非静 电力Fk所作的功 从场的观点: 非静电力对应非静电场
A非 q
q
E0
Fk qEk A非 Fk dl q Ek dl Ek dl
d 1.热效应: i dt
I
i
R
I(ω)
Q I 2 Rt 2
表明: 交流电频率越高发热越多——感应加 热原理
I(ω)
I(ω) I(ω)
I’
2.磁效应: 阻尼摆
上页 下页
小结:
动生电动势:磁场分布不变, 回路或导线在磁场中运动而引起的感应电动
势 感生电动势:导体回路不动,磁场随时间发生变化而引起的感应电动势
静电场
静止电荷
涡旋电场
变化磁场
有源场
无源场
上页 下页
感生电动势的计算 法拉第电磁感应定律
i
L
d d Ek dl
dt
dt
S B d S
因为回路固定不动,磁通量的变化仅来自磁场的变化
b
B B 1 2 dS 解: bc R S t t 2
B 0 t
× ×
O × × × ×
uc ub
a
× ×
上页
b E c
下页
四、涡电流
产生原因: 大块的金属导体处在变化的磁场中时,通过金属 块的磁通量发生变化,从而产生感应电动势,在 金属内部形成电流,称为涡电流。 涡电流特点:
A
G
E
B
。。
下页
如何度量这种本领? ε----电动势
上页
电动势: 电源把单位正电荷经内电路从 负极移到正极的过程中,非静 电力Fk所作的功 从场的观点: 非静电力对应非静电场
A非 q
q
E0
Fk qEk A非 Fk dl q Ek dl Ek dl
d 1.热效应: i dt
I
i
R
I(ω)
Q I 2 Rt 2
表明: 交流电频率越高发热越多——感应加 热原理
I(ω)
I(ω) I(ω)
I’
2.磁效应: 阻尼摆
上页 下页
小结:
动生电动势:磁场分布不变, 回路或导线在磁场中运动而引起的感应电动
势 感生电动势:导体回路不动,磁场随时间发生变化而引起的感应电动势
静电场
静止电荷
涡旋电场
变化磁场
有源场
无源场
上页 下页
感生电动势的计算 法拉第电磁感应定律
i
L
d d Ek dl
dt
dt
S B d S
因为回路固定不动,磁通量的变化仅来自磁场的变化
动生电动势
b
+ +
F + m+
+
v +
+ + +
+ -+ a+
+ + + +
产生动生电动势的非静电力就是洛仑兹力。 单位正电荷的洛仑兹力
Fm Ek v B e
太原理工大学大学物理
运动导体上的动生电动势 i l ( v B) dl 若为闭合导体 i ( v B) dl
+Q + +
+ + + + + + +
+ + +
+
+
+ +
P
1 2 BL 2
B + +
+
o
+ + +
+
+
+
+ + + + + +
在op段中应为由o指向p
+ + +
太原理工大学大学物理
非均匀磁场
导体平动
I 例4 无限长载流直导体通有 电流I,方向向上。导线ab垂 直于直导线且两者在同一平 面内,a、b距直导线的距离 分别为l1和l2,导线ab以速度v 在平面内向上运动,求ab两 端的电势差。
m Bvtdx l
l2
1
0 I l2 vt ln 2 l1
0 I vtdx 2x
B
d m 0 I l2 i v ln dt 2 l1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
=B .lω sin900 dl cos1800
v
B v ×B
ω
O
dl lL
[例4] 一金属杆在匀强磁场中转动,已知2-3:-4
B,ω ,L 。求:动生电动势。
解一:
ε . d = ( v ×B ) dl
v = lω
=B .lω sin900 dl cos1800
v
B v ×B
ω
O
dl lL
[例4] 一金属杆在匀强磁场中转动,已知2-3:-4
= Bv sina dl
v ×B
dl
a
L
v
B
[例2] 已知:v ,B,a ,L 。
2-3-4
求:ε
ε . d = ( v ×B ) dl
= v B sin900 dl cos (900 a )
= Bv sina dl
ε = Bv sina dl
v ×B
dl
a
L
v
B
[例2] 已知:v ,B,a ,L 。
v ×B
dl
a
L
v
B
[例2] 已知:v ,B,a ,L 。
2-3-4
求:ε
ε . d = ( v ×B ) dl
= v B sin900 dl cos (900 a )
v ×B
dl
a
L
v
B
[例2] 已知:v ,B,a ,L 。
2-3-4
求:ε
ε . d = ( v ×B ) dl
= v B sin900 dl cos (900 a )
B,ω ,L 。求:动生电动势。
解一:
ε . d = ( v ×B ) dl
v = lω
=B .lω sin900 dl cos1800
v
ε=
Bω
L 0
l
dl
B v ×B
ω
O
dl lL
[例4] 一金属杆在匀强磁场中转动,已知2-3:-4
B,ω ,L 。求:动生电动势。
解一:
ε . d = ( v ×B ) dl
2-3-4
v ×B v
B
[例1] 直金属杆在均匀 磁场中做切割磁力线运动。
求:动生电动势。
1. 选择 dl 方向;
dl
2. 确定 v × B 的方向;
3. 确定 dl 所在处的
B 及v ;
2-3-4
v ×B v
B
[例1] 直金属杆在均匀 磁场中做切割磁力线运动。 求:动生电动势。
2-3-4
v ×B
εd i = ( v ×B ) . dl ε i =l ( v×B ) . dl
v
fm
方向指向d l 为正
[例1] 直金属杆在均匀
2-3-4
磁场中做切割磁力线运动。
v
B
[例1] 直金属杆在均匀
2-3-4
磁场中做切割磁力线运动。
求:动生电动势。
v
B
[例1] 直金属杆在均匀
2-3-4
磁场中做切割磁力线运动。
v ×B
dl
dθ θ
θv
R B
[例3] 有一半圆形金属导线在匀强磁场2中-3-4
作切割磁力线运动。已知:v ,B ,R 。
求:动生电动势。
. d = ( v ×B ) dl
ε . = v ×B dl cos (v ×B ,dl )
= vB sin900 dl cosθ
v ×B
dl
dθ θ
θv
R B
Ek=
fm e
++ + ++
2-3-4
v ×B
v
fm
非静电性电场的场强为:
Ek=
fm e
= v×B
++ + ++
2-3-4
v ×B
v
fm
非静电性电场的场强为:
Ek=
fm e
= v×B
所以动生电动势为:
++ + ++
2-3-4
v ×B
v
fm
非静电ቤተ መጻሕፍቲ ባይዱ电场的场强为:
Ek=
fm e
= v×B
所以动生电动势为:
ε ε 5. 确定 d i 及 i ε . d i = ( v ×B ) dl
[例1] 直金属杆在均匀 磁场中做切割磁力线运动。 求:动生电动势。
2-3-4
v ×B
1. 选择 dl 方向;
dl
2. 确定 v × B 的方向;
v
3. 确定 dl 所在处的
B
B 及v ;
4. 确定 dl 与 v × B 的夹角;
作切割磁力线运动。已知:v ,B ,R 。
求:动生电动势。
ε . d = ( v ×B ) dl
v ×B
dl
dθ θ θv
R B
[例3] 有一半圆形金属导线在匀强磁场2中-3-4
作切割磁力线运动。已知:v ,B ,R 。
求:动生电动势。
. d = ( v ×B ) dl
ε . = v ×B dl cos (v ×B ,dl )
R B
[例3] 有一半圆形金属导线在匀强磁场2中-3-4
作切割磁力线运动。已知:v ,B ,R 。
求:动生电动势。
. d = ( v ×B ) dl
ε . = v ×B dl cos (v ×B ,dl )
= vB sin900 dl cosθ
ε =vB
π2 π2
cosθ
R dθ
=vB 2R
v ×B
ε ε 5. 确定 d i 及 i ε . d i = ( v ×B ) dl = v B dl cos00
[例1] 直金属杆在均匀 磁场中做切割磁力线运动。 求:动生电动势。
2-3-4
v ×B
1. 选择 dl 方向;
dl
2. 确定 v × B 的方向;
v
3. 确定 dl 所在处的
B
B 及v ;
4. 确定 dl 与 v × B 的夹角;
2-3-4
第四节
动生电动势
2-3-4 动生电动势
2-3-4
2-3-4 动生电动势
2-3-4
动生电动势:由于导线和磁场作相对运动所 产生的电动势。
2-3-4 动生电动势
2-3-4
动生电动势:由于导线和磁场作相对运动所 产生的电动势。
感生电动势:由于磁场随时间变化所产生的 电动势。
2-3-4 动生电动势
ε ε 5. 确定 d i 及 i ε . d i = ( v ×B ) dl = v B dl cos00 ε i =v B dl
[例1] 直金属杆在均匀 磁场中做切割磁力线运动。 求:动生电动势。
2-3-4
v ×B
1. 选择 dl 方向;
dl
2. 确定 v × B 的方向;
v
3. 确定 dl 所在处的
v = lω
=B .lω sin900 dl cos1800
v
ε=
Bω
L 0
l
dl
=
1 2
Bω
L
2
B v ×B
ω
O
dl lL
[例4] 一金属杆在匀强磁场中转动,已知2-3:-4
B,ω ,L 。求:动生电动势。
解一:
ε . d = ( v ×B ) dl
v = lω
=B .lω sin900 dl cos1800
dl
dθ θ θv
R B
[例4] 一金属杆在匀强磁场中转动,已知2-3:-4
B,ω ,L 。求:动生电动势。
解一:
v ω
B O L
[例4] 一金属杆在匀强磁场中转动,已知2-3:-4
B,ω ,L 。求:动生电动势。
解一:
v
ω
B
O
dl lL
[例4] 一金属杆在匀强磁场中转动,已知2-3:-4
B,ω ,L 。求:动生电动势。
2-3-4
求:ε
a
L
v
B
[例2] 已知:v ,B,a ,L 。
2-3-4
求:ε
ε . d = ( v ×B ) dl
a
L
v
B
[例2] 已知:v ,B,a ,L 。
2-3-4
求:ε
ε . d = ( v ×B ) dl
dl
a
L
v
B
[例2] 已知:v ,B,a ,L 。
2-3-4
求:ε
ε . d = ( v ×B ) dl
ε . i = l E k dl
++ + ++
2-3-4
v ×B
v
fm
非静电性电场的场强为:
Ek=
fm e
= v×B
所以动生电动势为:
ε . i = l E k dl
. =
l
(
v×B
)
dl
++ + ++
2-3-4
v ×B
v
fm
非静电性电场的场强为:
Ek=
fm e
= v×B
所以动生电动势为:
ε . i = l E k dl
. =
l
(
v×B
)
dl
εd i = ( v ×B ) . dl
++ + ++
2-3-4
v ×B