非惯性参考系
运动的相对性惯性与非惯性参考系

运动的相对性惯性与非惯性参考系本文将从相对性、惯性参考系和非惯性参考系三个方面来探讨运动的相对性以及运动参考系的特点和应用。
1. 相对性理论相对性理论是爱因斯坦的理论物理学中的一个重要概念。
它认为运动的描述是相对的,即不存在一个绝对静止的参考系,所有的运动都必须以某个其他物体或系统为基准。
这就是说,同一个物体在不同的参考系中有可能呈现不同的运动状态。
2. 惯性参考系惯性参考系是指一个相对于外界没有受到力的参考系。
在惯性参考系中,物体的运动状态完全符合牛顿第一定律即惯性定律,物体将保持匀速直线运动或保持静止状态,直到受到外力的作用。
在这个参考系中,物体的运动是简单、直观、易于描述的。
3. 非惯性参考系非惯性参考系是指一个相对于外界有受力的参考系。
在非惯性参考系中,物体受到了惯性力或伪力的作用。
惯性力是为了保持牛顿定律在非惯性参考系中成立而引入的一种力,它的大小和方向与物体的质量和加速度有关。
在非惯性参考系中,物体的运动状态会受到影响,加速度和力的关系需要通过惯性力来描述。
4. 运动的相对性运动的相对性是指同一个物体或系统在不同的参考系中可能呈现不同的运动状态。
这意味着观察者的选择会对运动的描述产生影响。
一个物体在相对静止的参考系中可能是静止的,但在相对于另一个物体运动的参考系中可能是运动的。
相对性的出现使运动的描述更加复杂,需要考虑多个参考系的因素。
5. 相对性的应用相对性理论在现实生活中有着广泛的应用。
其中最著名的就是狭义相对论和广义相对论。
狭义相对论揭示了高速运动物体的运动规律,包括时间的相对性和空间的收缩等现象。
广义相对论进一步研究了引力和时空的弯曲等问题,改变了我们对宇宙结构和黑洞等的认识。
总结起来,运动的相对性理论认为运动的描述是相对的,不存在绝对静止的参考系。
惯性参考系是指没有受到力的参考系,物体在其中运动符合牛顿第一定律。
非惯性参考系是指有受力的参考系,物体在其中受到惯性力的作用。
运动的相对性的应用使得我们对时间、空间和引力等方面的认识得到了深化。
非惯性参照系
非惯性参照系
非惯性参照系是一种特殊的参照系,它不遵循惯性定律,而是根据特定的条件来定义。
它
可以用来描述物体在特定的环境中的运动,也可以用来描述物体在特定的空间中的运动。
非惯性参照系的定义是:它是一种参照系,它的坐标系不遵循惯性定律,而是根据特定的
条件来定义。
它可以用来描述物体在特定的环境中的运动,也可以用来描述物体在特定的
空间中的运动。
非惯性参照系的应用非常广泛,它可以用来描述物体在地球表面上的运动,也可以用来描
述物体在太空中的运动。
它还可以用来描述物体在某种特殊的环境中的运动,比如在液体
中的运动,在磁场中的运动,在重力场中的运动等。
非惯性参照系的另一个重要应用是在航天飞行中,它可以用来描述飞行器在太空中的运动,以及飞行器在地球表面上的运动。
它可以帮助飞行员更好地控制飞行器,以及更好地掌握飞行器的位置和运动状态。
总之,非惯性参照系是一种重要的参照系,它可以用来描述物体在特定的环境中的运动,也可以用来描述物体在太空中的运动,以及飞行器在地球表面上的运动。
它的应用非常广泛,可以帮助人们更好地掌握物体的运动状态,从而更好地控制物体的运动。
非惯性参考系

r0 (t )
O
K系
x
y
D r0 d r ω r v v 0 ω r Dt dt
x
即:
v v v0 v f
2. 相对于K/系作匀速运动的点,科里奥利力
a Dv D ( v v 0 ω r) Dt Dt
P
z
r(t )
O
K 系
a0 0
z
y
r(t )
在 K 系看,P点受到真实力 F 作用:
F ma 2mω v mω (ω r)
x
r0 (t )
O
K系
x
y
在 K/ 系看,为了能形式上使用牛顿定律,质点P点所受的表 现力必须为零,故质点 P 除了受惯性离心力 fc 作用外,还受到另 一力 fcor 作用:
第3 章
非惯性参考系
§3.1 非惯性参考系、虚拟力
相对运动
静(定)参考系K—相 对观察者静止的参考系 动参考系K’-相对观察 者运动的参考系
三种运动:质点相对于静参考系作绝对运动,相对于 动参考系作相对运动;动参考系相对静参考系作牵连 运动
§3.1 非惯性参考系、虚拟力
平动参考系
设静参考系 K 为惯性系,在 任何时刻,动参考系 K/ 相对于 静参考系作平动,即动参考系的 坐标基矢相对于静参考系是常量。 为了在形式上用牛顿定律 解释物体在系中的运动,必须 认为物体除了受真实力F的作用 外,还受一虚拟力的作用。在 真实力和虚拟力共同作用下, 物体的运动仍满足牛顿定律。
2 2 P P f cos mg m R cos C
Pθ与P的夹角Φ :
第三章非惯性参考系

r
20
笫三章 非惯性参考系
由牛顿定律, v v2 2mv m r 2 r
v A
Fcor
C d
B
为了使轨迹过B点, 必须满足几何关系 d d r sin r 2 2r d d 2 弧BC 2 d 2 v
r
d 在K '中,子弹还受到惯性离心力 m ( ) 2 v d , 离心力可忽略。
21
笫三章 非惯性参考系
子弹相对圆盘的速度v ,方向沿AC 圆盘相对地有牵连速度 在这两个速度作用下, 子弹相对地面做匀速直线运动
d 子弹打到B点时间:t . v d d d 2 经t时间,子弹打到m点, 弧BM , v 2 2v d d 2 d 2 弧CM t 弧BC 2 2v v
---质点在K 系中的位移 r ( t ) ---质点在K系中的位移 r ( t ) r0 ( t ) --- K系相对K系的位移
Δt 时间后,质点位于Q点
o x K系 z
r0 o x
其中:
K 系 Q z Δr Δr P P' Δr0 o y x y
3
o x
K 0’ r '
m
r'
K系中测得的真实力F 0
2 K ' 系中, m做圆周运动,向心加速度a ' - r '. 2 则,表观力F ' ma ' -m r ' 科里奥利力 2 又,质点在r ' 处受到离心力Fc m r ' , 因此, 2 在K '中还要为质点引入一个虚拟力FCor -2m r ' 17
理论力学 非惯性参考系
§5.2 非惯性系中的动力学方程 惯性力 惯性系中: 惯性系中: m d2rI /dt2 = F 非惯性系: 非惯性系: mδ2r/δt2 =F -m[d2R /dt2+β×r +ω×(ω×r) +2ω×v'] β ω ω ω v' δ δ F = Feff 1,平移力 , - md2R /dt2 ← 动系平动加速 2,方位力 , - mβ × r β ← 动系转动加速 3,惯性离心力 , - m[ω × (ω × r ) ← 动系相对固定系转动 ω ω 4,科里奥利力 , - 2mω × v' ω ← 质点相对动系运动
= ω t t = 1 ln 2 + 3 ω
(
)
可证明,引入非惯性力 ,质点动量定理,角动 质点动量定理, 可证明, 量定理和动能定理的形式都保持不变. 量定理和动能定理的形式都保持不变. 例:角动量定理 : r' v') δ L' / δt = δ(r' × mv' / δt = δ(r' δt × mv' + r' × mδv'/ δt r')/δ v' δv' = r' × ( F + F惯性) 动能定理: v' 动能定理 ∵ m δv'/ δ t = F + F惯性 → m δv' δr / δt = (F + F惯性 ) δr F → m v' δv' = (F + F惯性 ) δr F F → δ(mv'2/2) = (F + F惯性 ) δr F 即: δT = (F + F惯性 ) δr
d L 2 L 2 d L 1 L 1 d df df = + & & & dt q dt q q q dt q dt q dt df f f df 2 f 2f & & Q q+ q+ = ∴ = 2 dt q t q dt q qt d df d f 2 f 2f & = q = q 2 q + qt & dt q dt dt d L 1 L 1 d L 2 L 2 因此, 因此,当 = 0时, =0 & & dt q dt q q q
第三章-非惯性参考系

由于初始时刻,A端与O点相距为d,所以c o s 0
d l
从而求出时间为: t d l cos
y y'
c
为化同一坐标系,由图中几何关系有: c
A
l
u
i'sini co sj
M
B
x
j'cosisinj
O
x'
13
理论力学
vt
d*r dt
'
r
'
6
理论力学
第三章 非惯性参考系
式中
dr' d*r' r' ,
dt dt
d*r'dx'i'dy' j'dz'k' dt dt dt dt
d r ' 称为 r ' 的绝对微商 dt
d *r dt
'
称为 r
' 的相对微商
r 称为 r ' 的牵连微商,
对于任意旋转矢量 A ,总有其绝对微商=相对微商+牵连微商
y y'
A
l
u
只需求出牵连速度,包括动系的平
M
B
O
动速度和转动速度。
x
x'
11
理论力学
第三章 非惯性参考系
解:建立如图所示的静直角系O-xyz
y y'
和固着在棒上的动直角系A-x’y’z’ A
由动系和静系速度变换关系: c l u
M
B
x
vv'vtr'
O
x'
据题意: v' ui ', vt vAcj, r'k' u ti'u tj'
惯性与非惯性系大学物理中参考系变换的分析
惯性与非惯性系大学物理中参考系变换的分析惯性与非惯性系:大学物理中参考系变换的分析在大学物理学中,研究运动的参考系变换是一个基本的课题。
参考系变换指的是在不同的观察参考条件下,描述物体运动的方式和规律可能有所不同。
其中,惯性系和非惯性系是关键概念。
一、惯性系的定义与特征惯性系是指一个自由运动的物体在该参考系中的运动状态保持匀速直线运动或静止状态的参考系。
惯性系的特征包括:在一个惯性系中,物体的速度和加速度仅受到物体自身所受到的力的影响,也就是满足惯性定律。
二、非惯性系的定义与特征相对于惯性系,非惯性系描述物体运动时需要考虑虚拟力的作用。
虚拟力是指在非惯性系中观察到的力,但实际上并不存在于物体上。
非惯性系的特征包括:在非惯性系中,物体会出现惯性力的存在,这是观察者引入的一种力,是为了使物体的运动描述满足牛顿定律。
三、参考系变换的基本原理1. 线性参考系变换在不同的惯性系之间进行参考系变换时,物体的速度和加速度在不同系之间是相等的。
这是基于惯性定律的推论,即物体的运动状态不受观察者选取的参考系的影响。
2. 非惯性系的参考系变换在从一个非惯性系到另一个非惯性系的参考系变换中,需要引入惯性力来使物体的运动描述满足牛顿定律。
惯性力的方向和大小是由参考系变换的加速度和物体的质量决定的。
四、参考系变换的应用参考系变换的应用非常广泛,特别是在解决旋转体和离心力等问题时,常常需要使用非惯性系的概念和方法。
1. 常见的非惯性系(1)转动参考系:某些问题需要将旋转天体、自转地球等情况考虑在内,这时需要使用转动参考系进行运动分析。
(2)加速度参考系:当物体受到加速度的影响时,物体的运动状态依赖于加速度参考系,此时需要考虑虚拟力的作用。
2. 应用举例(1)开车过弯:在汽车行驶过弯道时,车内乘客会感觉到一个向外的力,这是由于非惯性系(车体的向心加速度)引起的惯性力。
(2)旋转木马:在旋转木马上,乘客会感受到一个向外的力,也是由于非惯性系(旋转参考系)引起的惯性力。
非惯性参考系
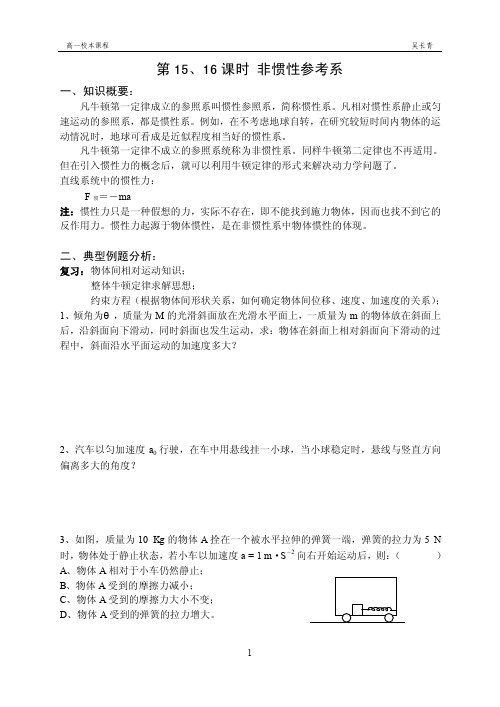
第15、16课时非惯性参考系一、知识概要:凡牛顿第一定律成立的参照系叫惯性参照系,简称惯性系。
凡相对惯性系静止或匀速运动的参照系,都是惯性系。
例如,在不考虑地球自转,在研究较短时间内物体的运动情况时,地球可看成是近似程度相当好的惯性系。
凡牛顿第一定律不成立的参照系统称为非惯性系。
同样牛顿第二定律也不再适用。
但在引入惯性力的概念后,就可以利用牛顿定律的形式来解决动力学问题了。
直线系统中的惯性力:F惯=-ma注:惯性力只是一种假想的力,实际不存在,即不能找到施力物体,因而也找不到它的反作用力。
惯性力起源于物体惯性,是在非惯性系中物体惯性的体现。
二、典型例题分析:复习:物体间相对运动知识;整体牛顿定律求解思想;约束方程(根据物体间形状关系,如何确定物体间位移、速度、加速度的关系);1、倾角为θ,质量为M的光滑斜面放在光滑水平面上,一质量为m的物体放在斜面上后,沿斜面向下滑动,同时斜面也发生运动,求:物体在斜面上相对斜面向下滑动的过程中,斜面沿水平面运动的加速度多大?2、汽车以匀加速度a0行驶,在车中用悬线挂一小球,当小球稳定时,悬线与竖直方向偏离多大的角度?3、如图,质量为10 Kg的物体A拴在一个被水平拉伸的弹簧一端,弹簧的拉力为5 N 时,物体处于静止状态,若小车以加速度a = 1 m·S-2向右开始运动后,则:()A、物体A相对于小车仍然静止;B、物体A受到的摩擦力减小;C、物体A受到的摩擦力大小不变;D、物体A受到的弹簧的拉力增大。
4、如图,质量为m A 、m B 的两个物体A 、B ,用细绳相连跨过光滑的滑轮,将A 置于倾角为θ的斜面上,B 悬空,斜面的质量为M 。
如果A 在斜面上沿斜面加速向下滑动的过程中,问:1)水平地面对斜面在竖直方向上的作用力多大? 2)斜面作用在高出地面壁上的水平方向的力多大?5、如图一个装有水的烧杯,总质量为M ,放在与水平面成α角的斜面上,与斜面之间的动摩擦因素为μ,当烧杯沿斜面向下平动时,若液面正好与斜面平行,试证明:沿斜面方向作用在烧杯上的推力大小等于斜面 对烧杯的摩擦力,即F =μMgcos α。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.平移惯性力 在S系中物体的运动满足牛顿定律:
F 和m不随参考系变化,即
F = ma
F → 真实力
但因 a ≠ a′ ,在S′系看来物体的运动不满足牛顿定律,即 F ′ ≠ m′a′ a aO ′ + a ′ = F= ma = ma ′ + maO′ ∴ F − maO′ = ma ′
如果说,潮汐是月球的万有引力吸引海水造成的,那么 (1)为什么向着和背着月亮一面的海水都升高,从而一昼夜涨两 次潮? (2)按距离平方反比计算,太阳对海水的引力比月亮大180倍, 为什么说潮汐主要是月亮引起的?
设地球没有自转,公转是圆轨道。 地球成为随球心平动的非惯性系
FC FA
A
C
f iC
回顾:
应用牛顿定律解题的基本方法
选对象 先用符号求解,后代入 数据计算结果 分析力
2 dv d r = F ma = m= m 2 dt dt
分析运动
(画受力图) 一般用分量式,用文字 符号列方程式
解方程
列方程
选坐标系
平动非惯性系内,质点运动的动力学
Feff = ma ′
太阳的引力差是其 引力的0.0017% 但仅为月亮引力的3%
农谚:“初一十五涨大潮,初八二十三到处见海滩” 海潮、地潮、气潮、生物潮
根据平衡潮理论,如果地球完全由等深海水覆盖,用万有引力计算, 月球所产生的最大引潮力可使海水面升高0.563m,太阳引潮力的作 用为0.246m,夏威夷等大洋处观测的潮差约1m,与平衡潮理论比 较接近,近海实际的潮差却比上述计算值大得多。如我国杭州湾的 最大潮差达8.93m,北美加拿大芬地湾最大潮差更达19.6m。
B
Sun
a0
S′系 Earth
f iA
a0 FB
FD
D
f iB
Earth
f iD
Earth
太阳引力大
月亮引力差大 月亮的引力差是 其引力的6.8% 太阳、月亮都会在地球 上产生潮汐现象,虽然 在地球处太阳的引力远 大于月亮的引力,但由 于潮汐现象主要来自于 引力的空间不均匀性, 由于月亮离地球要比太 阳近得多,故月亮比太 阳的引力不均匀性大得 多,月亮对潮汐的作用 比太阳更大。
Feff = ma ′
提供一种处理非惯性系 中动力学问题的方法.
质点所受惯性力的大小,等于质点的质量和此非惯性系 整体相对惯性系的加速度的乘积,方向与此加速度的方 向相反 f i = −m aO′
“虚拟力”和“真实力”的区别: ①不能指出是哪个物体作用; ②没有反作用力; ③所有质点都受力,而且惯性力与质点的位置无关,各处均匀。 其指向一律与“牵连”加速度(坐标系S′的加速度)相反,且 正比于质量(和重力类似); ④原则上讲,只要选择惯性系,就可以消除惯性力,而真实力 一般不能这样来消除。
由此可见:
根据实验现象,观察者无法区分引力场和惯性 力场。1911年爱因斯坦曾指出,至少在一个有限 的区域内,一个引力场的惯性系中和一个加速运 动的非惯性系中所发生的物理现象相同。即引力 场与惯性力场等效。它是广义相对论的基础。
4. 潮汐现象---力的空间不均匀性
“昼涨称潮,夜涨称汐” “潮者,据朝来也; 汐者,言夕至也” —葛洪《抱朴子·外佚文》
′ dv (t ) dvO ' (t ) ′ a (t ) = a (t ) + aO ' (t ) + = dt dt
x
vO ' (aO ' )
v′ (a′)
v (a )
绝对速度等于相对速度和牵连速度的矢量和; 绝对加速度等于相对加速度和牵连加速度的矢量和
引入虚拟力
m′ = m,
F′ = F
fi = −maO′
fi → 平移惯性力 , 简称惯性力
非惯性系S中,可以认为物体同时受到真实力和惯性力的作用, 真实力与虚拟力的合力称为表现力,记为 Feff Feff = F + fi
非惯性系S'中,形式上牛顿方程仍然成立
3.等效原理 引力场与惯性力场等效。在平动非惯性系中,每个物体都受到惯 性力的作用,惯性力分布于非惯性系中的每一个空间,形成惯性 力场。它与引力场相似。
静 止
g
加速上升
mg
地球
mgBiblioteka 无地球如图所示,在静止于地球的升降机中观察物体的运动。小球受到 引力为
F = mg 在远离地球以加速度 g 而加速上升的升降机观察物体的运动。小 球受到的惯性力为 f i = − mg
x′
位移合成法则: r= (t ) r ′(t ) + rO ' (t )
速度合成法则:
dr ′(t ) drO ' (t ) ′ v (t ) = + = v (t ) + vO ' (t ) dt dt
z
z′
O′
r′
rO '
r
P y′
x′
O
y
加速度合成法则:
Feff = F + fi
fi = −maO′
潮汐现象主要来自于引力的空间不均匀性,月亮对潮汐的作用 比太阳更大。
第三章
非惯性参考系
从一个问题开始:
a =0 a≠0
车的a = 0 时单摆和小球的状态符合牛顿定律, a≠0时单摆和小球的状态不符合牛顿定律,为什么?
因为在非惯性系中牛顿定律不再成立!
如何讨论非惯性系中的质点运动的动力学?
§3.1 平动非惯性参考系
非惯性参照系:牛顿定律不成立的参照系称为非惯性系。 相对于惯性系作变速运动的参照系是非惯性系,包括平动加速 系、转动系。 1.平动非惯性系的速度、加速度合成公式 平动非惯性系(S′):相对惯性系(S ) 做平动的参考系,因此其坐标轴的 方向必须保持不变。 若开始时S′系中的各坐标 轴与S系中的对应坐标轴相 互平行,则在运动过程中, S′的各坐标轴应始终与S系 S′系 z′ 的坐标轴保持平行。 注意:平动不一定是直线 o′ y′ 运动!S′系的坐标原点O′可 以做任何方式的直线或者曲 x′ 线运动! S′系 z′ z′ y ′ o′ S′系 z x′ o′ y′ S系 x′ o y S′系 z′ x o′ y′