S120通过111报文实现基本定位功能
西门子S120调试过程
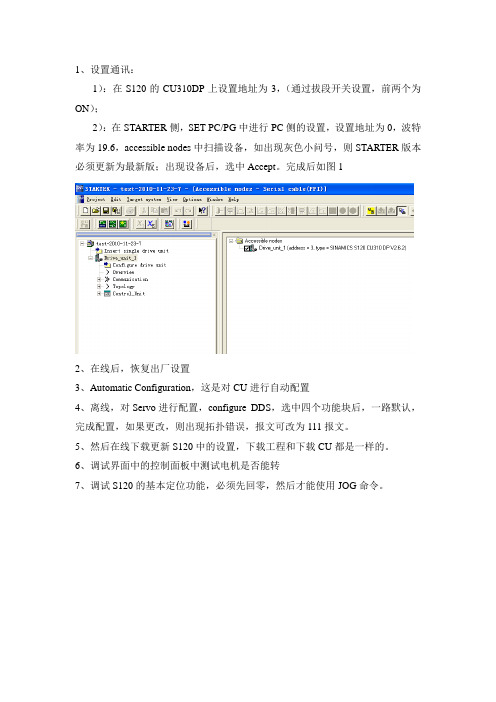
1、设置通讯:
1):在S120的CU310DP上设置地址为3,(通过拔段开关设置,前两个为ON);
2):在STARTER侧,SET PC/PG中进行PC侧的设置,设置地址为0,波特率为19.6,accessible nodes中扫描设备,如出现灰色小问号,则STARTER版本必须更新为最新版;出现设备后,选中Accept。
完成后如图1
2、在线后,恢复出厂设置
3、Automatic Configuration,这是对CU进行自动配置
4、离线,对Servo进行配置,configure DDS,选中四个功能块后,一路默认,完成配置,如果更改,则出现拓扑错误,报文可改为111报文。
5、然后在线下载更新S120中的设置,下载工程和下载CU都是一样的。
6、调试界面中的控制面板中测试电机是否能转
7、调试S120的基本定位功能,必须先回零,然后才能使用JOG命令。
西门子S7-1200 1500 FB284控制S120实现基本定位功能说明书
/CN/view/zh/109765580C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d目录1概述 ............................................................. 32SINA_POS(FB284)介绍 .. (33)SINA_POS 功能说明 ................................................. 63.1概述 ........................................................ 63.2功能块的运行模式介绍 ........................................ 63.2.1运行条件 .................................................... 63.2.2相对定位运行模式 ............................................ 63.2.3绝对定位运行模式 ............................................ 73.2.4连续运行模式(按指定速度运行) ................................ 83.2.5主动回零 .................................................... 93.2.6直接设置回零位置 ........................................... 103.2.7运行程序段 ................................................. 103.2.8按指定速度点动 ............................................. 113.2.9按指定距离点动 ............................................. 123.2.10运行中回零(被动回零) ....................................... 123.3基于ModePos 值的运行模式切换说明 (12)4项目配置 ........................................................ 134.1S120项目配置要点 ........................................... 134.2S7-1500项目配置步骤 (17)C o p y r i g h t ãS i e m e n s A G C o p y r i g h t y e a r A l l r i g h t s r e s e r v e d1概述S7-1200/1500可以通过PROFINET 通信连接SINAMICS S120伺服驱动器,PLC 通过西门子提供的驱动库中的功能块FB284可实现S120的基本定位(EPOS )控制。
SINAMICS S120基本定位的监视功能与应用
圈 P L C & I P C & E A S
S I NAMI C S¥1 2 0 基 本 定 位 的监视 功 能与应 用
SI NAM I CS Sl 2 0 Mo n i t o r i n g Fu n c t i on s a n d Ap p l i c a t i on s o f t h e Ba s i c Po s i t i on
动器 ,从功 能上 讲 ,已经超 越 了传统 变频器 的功 能范畴 。S 1 2 0  ̄ E 动不仅 仅
能 够 实 现 闭 环 矢 量 控 制 ,还 可 以 实 现
通过选件 ,应用于C A N总线等。
( 4 ) 与 上 位伺 服控 制 器 的 无 缝连 接 : 通 过 多 种 报 文 , 可 以 方 便 地 与
DCC 功 能 ,可 以 无 限 扩 展 变 频 器 的 逻
特点,还在很多细节上有所创新 :
( 7 )  ̄ J l 新性的连接Dr i v e - C L i Q:使 用Dr i v e — C L i Q可 以自动识 别设 备并 完 成组态 ,节约调试时间。
( 1 ) 功率 范 围大 :几Kw 到上Mw
制 。通过 参数 配 置 ,可 以实现 S 1 2 0 1  ̄ 5 , 位 置监 控 功能 ,对 驱 动器 各伺 服 轴的 位置 状 态进 行检 测 ,
优 化驱 动 轴的状 态 。本 文主 要对监 视 功能 的工 作原理 和 可配 置的 参数进 行 介绍 。 关 键词 N A MI C S S 1 2 0 继承和
发 展 了西 门子 变频 器 一 贯 的 功能 强 大 的
S I MO T I ON、C P U3 1 5 T 等运 动控制器 进行连接 ,实现高精度定位 。 ( 5 ) 内部 资源丰富 :除了传统变频 器的J O G、F i x e d S e t p o i n t 、MO P 、 自由 功能块 等 ,还可 以扩展 出回零 、程序 步 、MDI 等 定位操 作 。同时 ,集成 的
s120通讯协议书
s120通讯协议书在通信领域中,协议是一种规范和约定,它定义了通信双方之间进行信息交换的规则和格式。
而s120通讯协议是一种高级通信协议,主要用于工业自动化系统中的设备间通信。
s120通讯协议基于TCP/IP协议栈,是一种面向连接的协议,其目的是实现设备之间稳定、可靠的数据传输。
s120通讯协议主要用于工业设备之间的通信,例如PLC控制系统、过程控制系统、变频器等。
s120通讯协议的规范遵循了一定的格式,包括报文头、数据部分和校验码等。
报文头主要包括了源地址、目的地址、协议类型和数据长度等信息。
通过报文头,通信双方可以确认交换数据的源和目的地,并根据协议类型确定数据的处理方式。
在s120通讯协议中,数据部分定义了实际要传输的数据内容。
数据部分的格式可以是结构化的,例如在工业自动化中常用的Modbus协议,也可以是原始的二进制数据。
根据具体应用场景的需要,s120通讯协议可以定义不同的数据格式和数据类型。
为了确保数据的完整性和准确性,s120通讯协议还引入了校验码的机制。
校验码可以用于检查数据传输过程中是否发生了错误或数据被篡改。
常用的校验码算法包括CRC校验和和MD5校验等,可根据具体需求选择合适的校验码方式。
除了基本的通信机制,s120通讯协议还定义了一些高级功能和特性,以满足不同应用场景下的需求。
例如,s120通讯协议可以支持多种数据传输方式,如广播、单播和组播等。
同时,s120通讯协议还可以支持多种通信模式,如请求-响应、发布-订阅和事件驱动等。
总之,s120通讯协议是一种高级通信协议,用于工业自动化系统中设备之间的通信。
它基于TCP/IP协议栈,采用面向连接的方式,通过报文头、数据部分和校验码等来定义通信规范。
s120通讯协议具有灵活、可靠和安全的特点,并且支持多种数据传输方式和通信模式。
它的应用范围广泛,可用于PLC控制系统、过程控制系统和变频器等工业设备之间的数据交换和通信。
S120地基本定位功能
S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的 DC/AC 装置用于单轴系统的 AC/AC 装置这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的 S120具有如下定位功能:•点动 (Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零 (Homing/Reference):用于定义轴的参考点或运行中回零•限位 (Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步 (Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用 S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器 Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
S120的基本定位功能
S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的DC/AC 装置用于单轴系统的AC/AC 装置这两种形式的Firmware 及以上版本都已具备基本定位功能。
当前版本的S120具有如下定位功能:•点动(Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零(Homing/Reference):用于定义轴的参考点或运行中回零•限位(Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步(Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入(Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用S120 基本定位功能的前提条件:调试软件:Starter 或更高版本/ SCOUT 或更高版本硬件版本:SINAMICS FW: HF2 或更高版本注:安装SCOUT 需要STEP 7 版本至少为以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计高挺;朱晓民;张希;程金【摘要】针对自动化系统中集成S120伺服驱动模块时遇到的控制及通讯难题,设计了基于111报文的S7-300通讯控制程序模块Servo120。
使得从事自动化工作的工程师可以通过该模块简单、快捷的实现S7控制系统与S120伺服驱动模块的通讯,并通过报文方式实现S7-300PLC对S120伺服驱动模块的速度与位置控制。
模块对报文中的控制及状态字进行详细解析,大大提高了调试诊断效率。
并设置了多点联动,速度转换等模式,极大的方便了现场应用,提高了系统集成过程的效率并降低了操作难度。
【期刊名称】《制造业自动化》【年(卷),期】2016(038)010【总页数】3页(P67-69)【关键词】S120伺服驱动模块;111报文;程序模块【作者】高挺;朱晓民;张希;程金【作者单位】北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120【正文语种】中文【中图分类】TP23当今,企业对生产设备的要求是设备生产成本越来越低,但同时能够提供越来越高的生产效率。
SINAMICSS120伺服驱动模块因恰恰能满足这些方面的要求而被广泛应用于自动化系统中。
对于自动化系统集成商而言,伺服系统的好处虽然很多,但其与中央控制器的融合过程往往因工程师经验不足等原因而变得比较困难。
本文以S7-300与S120通讯的111报文为基础,对其进行深入解读,设计出一款专用通讯控制程序模块。
为S120伺服驱动模块在以S7-300为核心的自动化系统中的应用带来了极大的便利。
通讯控制程序模块的设计是基于S7-300的PLC与S120通讯111报文的,因此模块环境平台的搭建如下:在S7硬件中配置S120硬件(如图1硬件配置),在整个项目中集成S7-300CPU作为整个系统的核心控制器、S120伺服驱动模块、MP277人机交互触摸屏系统(如图2项目配置),以图3网络连接所示的方式通过PROFIBUS网络组成统一的系统。
S120的基本定位功能

S120的基本定位功能一、概述S120 有两种形式:用于多轴系统的 DC/AC 装置用于单轴系统的 AC/AC 装置这两种形式的 Firmware V2.4 及以上版本都已具备基本定位功能。
当前V2.4 版本的 S120具有如下定位功能:•点动 (Jog):用于手动方式移动轴,通过按钮使轴运行至目标点•回零 (Homing/Reference):用于定义轴的参考点或运行中回零•限位 (Limits):用于限制轴的速度、位置。
包括软限位、硬限位•程序步 (Traversing Blocks):共64个程序步,可自动连续执行一个完整的程序也可单步执行•直接设定值输入/手动设定值输入 (Direct Setpoint Input / MDI):目标位置及运行速度可由上位机实时控制。
使用 S120 基本定位功能的前提条件:调试软件:Starter V4.0 或更高版本 / SCOUT V4.0 或更高版本硬件版本:SINAMICS FW: V2.4 HF2 或更高版本注:安装 SCOUT V4.0 需要STEP 7 版本至少为 V5.3.3.1 以上二、激活基本定位功能S120的定位功能必须在变频器离线配置中激活,步骤如下:定位功能激活后可使用STARTER中的控制面板或专家参数表进行设置使用控制面板使用专家参数表使用控制面板的操作步骤:三、基本定位_点动(JOG)S120 中基本定位功能的点动有两种方式:•速度方式( travel endless):点动按钮按下,轴以设定的速度运行直至按钮释放。
•位置方式( travel incremental):点动按钮按下并保持,轴以设定的速度运行至目标位置后自动停止。
•使用控制面板的点动功能仅限于速度方式,位置方式需使用专家参数表设定。
•执行点动功能,应先使能变频器ON/OFF1(P0840)四、基本定位_回零(Homing / Reference)回零/寻参(Homing / Reference)回参考点模式(回零模式)只有使用增量编码器(旋转编码器Reserver、正/余弦编码器Sin/Cos 或脉冲编码器)时需要,因每次上电时增量编码器与轴的机械位置之间没有任何确定的关系。