机器人大赛2d
机器人比赛

•
用Sony公司生产的“爱 宝”(AIBO)机器狗作为比赛专 用机器人,比赛在4.2m×2.8m 的绿色场地上进行。比赛双方 各有四个机器人上场,上下半 场各10分钟,队员之间可以进 行无线通讯,但禁止任何形式 的远程控制,从而保证每一支 球队都是一个独立系统。
中国机器人大赛
• 中国机器人大赛是我国智能机器人领域的一项顶级赛事,是国际机器人足球
•
锦标赛(RoboCup)、国际机器人足球联盟(FIRA)两大机器人竞赛组织在国内唯 一授权举办的国际性机器人赛事。 中国机器人大赛以“发展机器人技术,普及机器人文化”为宗旨,致力于培 养青少年开发、研制和应用高科技的兴趣与爱好,普及现代科技知识,为机 器人事业发展发掘培养后备人才,推动智能自动化技术的创新与发展,是一 项科技、体育、文化高度融合的竞技活动,代表了中国机器人研究的最高水 平,在国内外有着较强影响力和品牌效应。 RoboCup中国公开赛是国际机器人足球锦标赛(RoboCup)五大公开赛之一。 RoboCup是将计算机人工智能与足球结合并进行深入研究的国际机器人组织, 其所举办的机器人足球赛已成为各类国际机器人竞赛中最具水平和影响力的 赛事之一,与FIRA Cup系列比赛一起被称机器人足球“世界杯”。 2010年7月18日-20日,由中国自动化学会机器人竞赛工作委员会、 RoboCup中国委员会、科技部高技术发展研究中心举办的 2010中国机器人大 赛暨RoboCup公开赛在内蒙古鄂尔多斯市康巴斯新区成功举行。
(二)RoboCup救援组比赛 1、仿真组 2、机器人组 (三)RoboCup家庭组比赛 (四)FIRA足球机器人比赛 1、仿真组 2、小型组 (五)空中机器人比赛 1、固定翼 2、旋翼
法兰克机器人2D3D视觉系统设置

2D&3D视觉系统设置一)概要:视觉系统(2DV、3DL)功能主要是通过视觉系统软件设置,建立视觉画面上的点位与机器人位置相对应关系。
对工件进行视觉成像,与已标定的工件进行比较,得出偏差值,即机器人抓放位置的补偿值。
本小结是以0397-JNKC济南重汽机床上下料项目为例说明2D&3D视觉系统设置的详细步骤。
优势:●降低了抓放工件位置的精度要求,机器人自动补偿抓放●柔性度高,可以同时应用于多种工件软件:●1A05B-2500-J868 ! iR Vision Standard●1A05B-2500-J869 ! iR Vision TPP I/F●1A05B-2500-J871 ! iR Vision UIF Controls●1A05B-2500-J900 ! iR Vision Core●1A05B-2500-J901 ! iR Vision 2DV●1A05B-2500-J902 ! iR Vision 3DL二)现场2D&3D视觉系统相机的安装位置三)视觉系统设置:2D Camera 3D Camera1)机器人与电脑连接设置如下:机器人电脑IP 172.16.0.2 172.16.0.3子网掩码255.255.255.0 255.255.255.0 网关172.16.0.1 172.16.0.13 连接完毕后,在IE地址栏中输入172.16.0.2进入图1图1点击上图中的“Vision Setup”,进入下图。
2)Camera Setup Tools 设置点击上图Vision Setup,然后再点击下图Camera Setup Tools(摄像头设置工具)点,Type:Prograessive Scan CameraName:DV2点击OK,进入下图。
图2 DV2为2D摄像头设置。
DL3为3D摄像头设置。
A)2DV Camera Setup Tools双击DV2,进入图3 双击,进入新建图3B)3DL Camera Setup Tools双击DL3,进入图4图42D摄像头安装在机器人上,打勾曝光时间,越大越亮可条光圈让数值尽可能小摄像点:工件太大时,需要多个照相点。
wrc世界机器人大赛主客观题

wrc世界机器人大赛主客观题(原创版)目录1.WRC 世界机器人大赛简介2.大赛的主要内容:主观题和客观题3.主观题的挑战和考察方向4.客观题的挑战和考察方向5.WRC 世界机器人大赛的影响和意义正文WRC 世界机器人大赛,全称 World Robot Conference,是由国际机器人联合会(IFR)主办的一项全球性机器人技术竞赛活动。
该比赛旨在促进机器人技术的发展和应用,推动机器人行业的创新和进步。
大赛涵盖了多个领域,如工业机器人、服务机器人、医疗机器人等,通过设置不同的比赛项目和任务,选拔出最具创新和实力的机器人团队。
在 WRC 世界机器人大赛中,参赛队伍需要面对两大类型的题目:主观题和客观题。
这两类题目分别从不同的角度对参赛队伍进行考察,从而全面展示机器人的技术水平和应用能力。
主观题,顾名思义,是指参赛队伍需要根据给定的任务要求,自行设计机器人的解决方案。
这类题目具有很强的挑战性,因为它要求参赛队伍充分发挥自己的创造力和技术实力,以实现任务目标。
主观题的考察方向主要包括机器人的自主决策能力、路径规划能力、协同作业能力等。
这些能力是机器人在复杂环境中执行任务的关键,也是衡量机器人技术水平的重要标准。
与主观题相对应的是客观题,这类题目主要考察机器人在特定场景下的实际操作能力。
客观题通常会设定一些具体的任务,如搬运、装配、检测等,要求机器人在限定的时间内完成任务。
这类题目的挑战在于,参赛队伍需要确保机器人在实际操作中具备较高的精度、速度和稳定性。
客观题的考察方向主要包括机器人的精确控制、运动规划、传感器技术等。
这些技术是机器人在实际应用中取得成功的关键因素。
WRC 世界机器人大赛不仅为参赛队伍提供了一个展示技术实力的平台,同时也为整个机器人行业带来了很多积极的影响。
首先,大赛有助于推动机器人技术的创新和发展,通过竞赛的方式,激发了研究人员和工程师的创造力,促进了新技术的诞生和应用。
其次,大赛为机器人产业提供了一个发现和培养人才的机会,很多优秀的机器人技术人才在这个平台上脱颖而出,为我国机器人产业的发展做出了重要贡献。
FANUC机器人机器人视觉成像应用(2D)
发那科机器人视觉成像应用(2D)目录第一部分:视觉设定 (2)第二部分:视觉偏差角度的读取与应用 (8)应用范围:摄像头不安装在机器人上。
第一部分:视觉设定发那科机器人视觉成像(2D-单点成像),为简化操作流程,方便调试,请遵循以下步骤:1、建立一个新程序,假设程序名为A1。
程序第一行和第二行内容为:UFRAME_NUM=2UTOOL_NUM=2以上两行程序,是为了指定该程序使用的USER坐标系和TOOL坐标系。
此坐标系的序号不应被用作视觉示教时的坐标系。
2、网线连接电脑和机器人控制柜,打开视频设定网页(图一)。
3、放置工件到抓取工位上,通过电脑看,工件尽量在摄像头成像区域中心,且工件应该全部落在成像区域内。
4、调整机器人位置,使其能准确的抓取到工件。
在程序A1中记录此位置,假设此位置的代号为P1。
抬高机械手位置,当其抓取工件运行到此位置时自由运动不能和其他工件干涉,假设此点为P2。
得到的P1和P2点,就是以后视觉程序中要用到的抓件的趋近点和抓取点。
5、安装定位针,示教坐标TOOL坐标系(不要使用在程序A1中使用的坐标系号,假设实际使用的是TOOL3坐标系);TOOL坐标系做完之后一定不要拆掉手抓上的定位针,把示教视觉用的点阵板放到工件上,通过电脑观察,示教板应该尽量在摄像头成像区域中心。
示教USER坐标系(不要使用在程序A1中使用的坐标系号,假设实际使用的是USER3坐标系)。
此时可以拆掉手抓上的定位针USER坐标系做好之后一定不要移动示教用的点阵板。
6、按照如下图片内容依次设定视觉。
图一:设定照相机(只需要更改),也就是曝光时间,保证:当光标划过工件特征区域的最亮点时,中g=200左右。
其他不要更改。
图二:标定示教点阵板。
此时,只需要更改如下内容:图三:标定示教点阵板需要做的设定图四: 标定示教点阵板时,观察数据误差范围设定完以上内容后,方可以移走示教用的点阵板。
之前任何时候移动此示教板,都会造成错误!!图五(与图六为同一个页面,一个图上截屏不完整。
机器人2D仿真球队高层决策的设计

表 l 常见的阵型列表 阵型名 F 3 f i T 3 4o e i 。 F 4 T 42d
。e 。, f i。 、
阵型种类
特点
如果蚶方控球已经带球进入我方半场 , 但是在
我 方 禁 区 前 , 利 用 场 上两 点 作 直 线 的方 法 , 取 则 选 球 门 的 上 下 两 点 坐 标 与 对 方 控 球 队 员 的坐 标 作 直
Cin S re 结 构 , o o u l t evr e/ R b C p联 合 会 提 供 了 一 个 标 准 当球在 本 方 球 员 的脚 下 时 , 球 队 员 需 要 在 一 控 2 传 球 决策
的 Sre 系统 rssre,参赛 球 队 各 自编写 ci t evr csevr l n e
・
2 4・
黄 山 学 院 学 报
2 1 年 01
太 长 , 此传 球是 最 重 要 也 是最 常 见 的 智 能体 之 间 因
重要 的协作 。 如 图 2所示 , 我们 可 以将 场 地 划 分成 若干 区域 ,
作 切线 , 意 有 两条 这样 的射 线 , 注 分别 对 应 于两个 不 同的 围绕 球 员转球 的方 向 ,需要 小 心 的是一 定要 确
收 稿 日期 : 0 1 0 - 5 2 1 - 1 0
:
m
15 ) 曲 l 0 (o O 曲 1 0 曲 1 0) 0 4 ) tt 3 ) 2 1 0 曲 ¨ o ) ’ f2 ‘ 0 j 、 , r4 ) ‘b 0 0 t 0 f f5 ) b
图 1 R b C p仿 真 比赛 虚 拟 球 场 中的 标 记 和 边 线 oo u
球 传 出去 4 a区 : 6区内找 到最 自由的队友将 球传 出去 ; 在
青少年机器人竞赛VEX 机器人挑战赛项目规则-扭转乾坤(初中组、高中组、职教组)
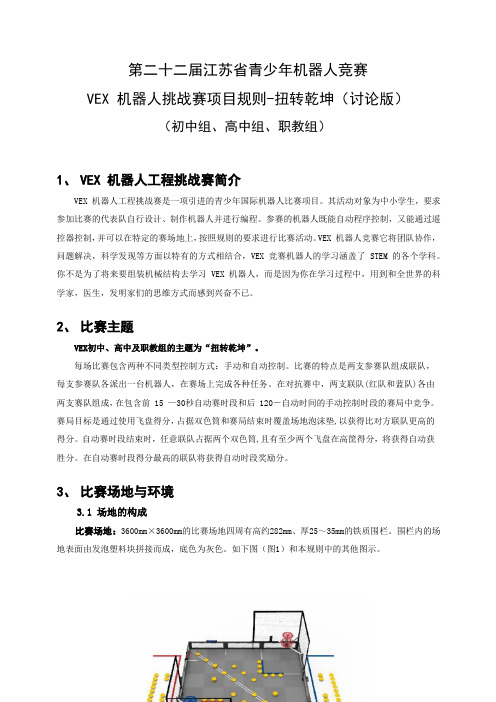
b.可能损坏其它参赛机器人的。
c.造成与其他机器人或网纠缠风险的。
d.可能对上场的参赛选手、赛事工作人员或其他人员造成潜在安全风险的。
d.不接触网。
e.不接触高筐,或高筐下方的任何支撑结构。
注:在高筐内得分的飞盘不再视为在领地内得分。
图 14高亮显示领地内得分的飞盘
在图 14中:飞盘 B, D, E, F, G,和 I 均在领地中得分;飞盘 H 不得分,因为它被与领地同色联队的机器人完全支撑;飞盘 A, C, J, 和 K 不得分,因为它们接触领地外的灰色泡沫垫。
注:若某个机器人未试图逃脱,则该机器人未被围困。
违规- 违反竞赛规则的行为。
轻微违规– 不会导致 DQ 的违规。意外的、短暂的或其他不影响赛局的违规通常是轻微违规;轻微违规通常会导致主裁判在赛局期间发出口头警告,这是在违规升级为重大违规之前通知赛队他们正在违规。
重大违规-导致 DQ 的违规。
除非另有说明,所有影响赛局的违规均为重大违规。规则中有相关说明,严重或或故意的违规行为也可能是重大违规行为;在一场赛局或赛事中的多次轻微违规可能会由主裁判决定升级为重大违规。
5.5 自动时段奖励分和自动获胜分
5.5.1自动时段奖励分:自动赛时段结束后,得到最多双色筒和飞盘分值的联队获得10分自动时段奖励分。
5.5.2自动获胜分:自动赛时段结束后,占据两个双色筒并在与其联队同色的高筐中至少有两个得分的飞盘的联队获得自动获胜分。
注:自动比赛时段与操作手控制时段的记分原则相同。
赛局– 一个设定的时间段,包含自动赛时段和手动控制时段,在这段时间内,赛队使用特定版本的扭转乾坤规则通过比赛获取分值。
自动赛时段– 这是一局比赛开始时的 15-30秒间随机时段,此时机器人的运行和反应只能受传感器输入和参赛选手预先写入机器人主控器的命令的影响。
机器人比赛项目具体介绍
1、RoboCup足球机器人仿真组(2D 3D)仿真组比赛类似FIFA系列足球游戏,由程序自主控制,完全模拟真人比赛, 比赛的方式是由Robocup委员会提供标准的Soccerserver系统,各参赛队编写各自的CLIENT程序,模拟实际足球队员参加比赛。
Soccerserver是一个允许竞赛者使用各种程序语言进行仿真足球比赛的系统。
一个机器人是Age nt,拥有自己的大脑,是一个独立的"主体"。
而一个球队实际是程序组成的。
服务器的工作就是计算并更新球场上所有物体的位置和运动,发送视觉和听觉信息给球员,接Server,即Soccerserver ,提供了一个虚拟场地,并对比赛双方的全部队员和足球的移动进行仿真。
Client,相当于球员的大脑,指挥球员的运动。
Server和Client之间的通信是通过UDP/IP 协议进行的。
可设定阵型、战术、体力消耗等一系列参数,比赛上下半场各5分钟,由电脑裁判进行在线裁定。
三维仿真与二维仿真相比,实现了对空间的模拟实战,使比赛更加激烈,更具观赏性。
2、RoboCup足球机器人中型组中型组是由两支各有4个机器人的球队在5X 10米的场地上进行的比赛,每个机器人的尺寸小于50 X 50 X 80cm。
所有的机器人是全自主的,所有的传感器都由机器人自身携带,机器人能使用无线网络与队友、场外Coach机进行通讯。
除了机器人上下场外,不允许人类对比赛进行额外的干预。
因此机器人是全分布式的和全自主的,机器人需要能够完全自主的通过传感器信息完成目标识别和自定位,决定自身采取的动作,控制电机和其它执行机构以完成比赛。
每场比赛分成两个15分钟的半场。
比赛过程由人类裁判控制,裁判具有绝对的权威贯彻比赛规则的执行。
同时有一个助理裁判负责操作裁判盒程序,根据主裁判的判罚发出相应的指令如比赛开始、暂停、开球、任意球等给比赛双方球队的场外Coach机,场外Coach机再将指令通过无线网络发送给场上比赛的机器人。
合肥工大机器人足球仿真2D考试复习题目及答案
笔记:大概从第五章开始p95球员自身属性/射门p98获得其他球员属性/传球动作p100其他函数p113返回当前环境信息函数p116我最近我去抢球p117球员原子动作p119 3种带球速度p120没人防守快速带球有人防守慢速p122踢球/传给最近队友p123移动到某点转身体p124截球p132综合策略(根本看不懂~)p199 附录linux基本操作p203踢向某点p204带球p206射向球门/带球+传球p207 一些射门传球时需要的函数参考P208 实验内容截球/要更改worldmodel.h p209左有人向右45度带球反之课本5个实验代码:// 1//VecPosition posGoal(0,0);//踢到场中间// 2//VecPosition posGoal =WM-> getPosOpponentGoal();////3//VecPosition posGoal=WM->getPosOpponentGoal();//向球门方向慢速带球//AngDeg ang=(posGoal-posAgent).getDirection();//soc=dribble(ang,DRIBBLE_SLOW);// 4//soc=kickTo(WM->getClosestInSetTo(OBJECT_SET_TEAMMATES,posAgent), SS->getBallSpeedMax()+200);//最大速踢给最近球员//5// soc=leadingPass(OBJECT_TEAMMATE_9,1);//踢给9号,误差范围1// 6//else {if(posBall.getY()>0){VecPosition pos(40,20);double speed=1.0;soc=kickTo(pos,speed);}else{VecPosition pos(40,-20);double speed=1.0;soc=kickTo(pos,speed);}ACT->putCommandInQueue(soc);ACT->putCommandInQueue( turnNeckToObject( OBJECT_BALL, soc ) );}}//球员在左踢到右反之。
FANUC机器人机器人视觉成像应用(2D)资料讲解
F A N U C机器人机器人视觉成像应用(2D)发那科机器人视觉成像应用(2D)目录第一部分:视觉设定 (3)UFRAME_NUM=2 (3)UTOOL_NUM=2 (3)UFRAME_NUM=3 (7)UTOOL_NUM=3 (7)第二部分:视觉偏差角度的读取与应用 (9)PR[1]=VI[1].OFFSET (9)R[1]=PR[1,6] (9)应用范围:摄像头不安装在机器人上。
第一部分:视觉设定发那科机器人视觉成像(2D-单点成像),为简化操作流程,方便调试,请遵循以下步骤:1、建立一个新程序,假设程序名为A1。
程序第一行和第二行内容为:UFRAME_NUM=2UTOOL_NUM=2以上两行程序,是为了指定该程序使用的USER坐标系和TOOL坐标系。
此坐标系的序号不应被用作视觉示教时的坐标系。
2、网线连接电脑和机器人控制柜,打开视频设定网页(图一)。
3、放置工件到抓取工位上,通过电脑看,工件尽量在摄像头成像区域中心,且工件应该全部落在成像区域内。
4、调整机器人位置,使其能准确的抓取到工件。
在程序A1中记录此位置,假设此位置的代号为P1。
抬高机械手位置,当其抓取工件运行到此位置时自由运动不能和其他工件干涉,假设此点为P2。
得到的P1和P2点,就是以后视觉程序中要用到的抓件的趋近点和抓取点。
5、安装定位针,示教坐标TOOL坐标系(不要使用在程序A1中使用的坐标系号,假设实际使用的是TOOL3坐标系);TOOL坐标系做完之后一定不要拆掉手抓上的定位针,把示教视觉用的点阵板放到工件上,通过电脑观察,示教板应该尽量在摄像头成像区域中心。
示教USER坐标系(不要使用在程序A1中使用的坐标系号,假设实际使用的是USER3坐标系)。
此时可以拆掉手抓上的定位针USER坐标系做好之后一定不要移动示教用的点阵板。
6、按照如下图片内容依次设定视觉。
图一:设定照相机(只需要更改),也就是曝光时间,保证:当光标划过工件特征区域的最亮点时,中g=200左右。
2024.03全国青少年机器人技术等级考试理论实操试卷(二级)
青少年机器人技术等级考试理论综合试卷(二级)分数:100 题数:45一、单选题(共30题,共60分)1.一个机器小车,用左右两个电机分别控制左右车轮,左侧电机转速是100rpm,右侧电机转速是A. 原地右转B. 向右前方转向C. 原地左转D. 原地不动试题编号:20240307091726224试题类型:单选题标准答案:B试题难度:试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:2.以下装置容易出现打滑现象的是?()A. 皮带传动装置B. 链传动装置C. 齿轮传动装置D. 蜗轮蜗杆机构试题编号:20240307091727888试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:3.如图,该机构中棘轮是指?()A. aB. bC. cD. d试题编号:20240307091726647试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:4.如图,关于飞机起飞时的机翼示意图,说法正确的是?()A. 机翼上侧所受的气压为0B. 机翼上侧气流速度比下侧慢C. 机翼上侧曲线弧度小于下侧D. 机翼上侧所受的气压小于下侧试题编号:20240307091725832试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:B考生得分:0是否评分:已评分评价描述:5.如图,下图中哪个是皮带交叉传动?()A. aB. bC. cD. d试题编号:20240307091727952试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:6.如图,下列哪个是工业机器人?()A. aB. bC. cD. d试题编号:20240307091725551试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:7.如图,下列物品的特殊设计为了减小摩擦的是?()A. aB. bC. cD. d试题编号:20240307091726162试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:8.凸轮从动件的运动规律是由什么决定的?()A. 凸轮的颜色B. 凸轮的大小C. 凸轮的轮廓曲线D. 凸轮旋转的周期试题编号:20240307091727409试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:9.中国家用电器一般电压约为?()A. 1.5VB. 1000vC. 36VD. 220V试题编号:20240307091725879试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:10.如图,曲柄滑块机构中哪个部分做回转运动?()A. aB. bC. cD. d试题编号:20240307091726521试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:11.关于力的方向,下列说法正确的是?()A. 重力的方向不能确定B. 重力是垂直于水平面竖直向上的C. 重力是垂直于水平面竖直向下的D. 重力是平行于水平面的试题编号:20240307091726115试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:12.如图,下列哪个选项是摩擦式棘轮机构?()A. aB. bC. cD. d试题编号:20240307091726584试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:13.如图,采用了圆柱凸轮的是?()A. aB. bC. cD. d试题编号:20240307091726757试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:14.如图,这是记里鼓车模型,它的作用是?()A. 计量车的行驶里程B. 击鼓娱乐C. 运送军用物资D. 计时试题编号:20240307091725488试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:15.关于齿轮平行啮合,下列说法正确的是?()A. 两轮转向相同B. 两轮转向相反C. 无法计算传动比D. 容易出现打滑试题编号:20240307091727999试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:16.如图,采用了摆动型从动件的是?()A. aB. bC. cD. d试题编号:20240307091726710试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:17.第三代机器人是?()A. 示教再现机器人B. 感知机器人C. 智能机器人D. 服务机器人试题编号:20240307091725598试题类型:单选题标准答案:C试题难度:试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:18.在双摇杆机构中摇杆做什么动作?()A. 沿着轨道来回滑动B. 回转运动C. 静止不动D. 左右摇摆试题编号:20240307091726819试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:19.如图,下列说法正确的是?()A. 这是齿轮平行啮合B. 这是链传动C. 这是皮带传动D. 这是齿轮垂直啮合试题编号:20240307091727842试题类型:单选题标准答案:D试题难度:一般试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:20.如图,关于该机构,下列说法正确的是?()A. 这是棘轮机构B. 这是槽轮机构C. 这是凸轮机构D. 采用了几何锁合方式试题编号:20240307091726881试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:21.如图,关于该机构,下列说法正确的是?()A. 这是凸轮机构B. a是主动件C. 这是棘轮机构D. 这是不完全齿轮机构试题编号:20240307091727133试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:22.如图,小朋友滑滑梯的过程中,下列哪个不是他受到的力?()A. 弹力B. 摩擦力C. 重力D. 支持力试题编号:20240307091726052试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:23.如图,下列凸轮机构使用了平底从动件的是?()A. aB. bC. cD. d试题编号:20240307091727008试题类型:单选题标准答案:C试题难度:一般试题解析:考生答案:C考生得分:2是否评分:已评分评价描述:24.挖掘机的机械臂采用了哪种机构?()A. 连杆机构B. 棘轮机构C. 槽轮机构D. 凸轮机构试题编号:20240307091726458试题类型:单选题标准答案:A试题难度:试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:25.下列常见物品重力最大的是?()A. 一块橡皮B. 一把尺子C. 一个笔记本D. 一张桌子试题编号:20240307091725990试题类型:单选题标准答案:D试题难度:试题解析:考生答案:D考生得分:2是否评分:已评分评价描述:26.如图,该机构中回转体做什么动作?()A. 上下直动B. 回转运动C. 在既定的轨道上滑动D. 摇摆运动试题编号:20240307091727352试题类型:单选题标准答案:B试题难度:一般试题解析:考生答案:B考生得分:2是否评分:已评分评价描述:27.关于能量说法错误的是?()A. 机械能包括动能和势能B. 动能可以转化为势能C. 势能可以转化为动能D. 机械能不能转化为电能试题编号:20240307091726271试题类型:单选题标准答案:D试题难度:试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:28.如图,关于该机构,下列说法正确的是?()A. b是主动件B. 这是棘轮机构C. 这是凸轮机构D. 这是连杆机构试题编号:20240307091727274试题类型:单选题标准答案:A试题难度:一般试题解析:考生答案:A考生得分:2是否评分:已评分评价描述:29.典型棘轮机构不包括?()A. 主动摆杆B. 主动棘爪C. 棘轮D. 止回摆杆试题编号:20240307091727560试题类型:单选题标准答案:D试题难度:试题解析:考生答案:A考生得分:0是否评分:已评分评价描述:30.下列机构不属于间歇运动机构的是?()A. 全齿轮啮合机构B. 槽轮机构C. 不完全齿轮啮合机构D. 凸轮机构试题编号:20240307091727474试题类型:单选题标准答案:A试题难度:试题解析:考生答案:C考生得分:0是否评分:已评分评价描述:二、多选题(共5题,共20分)31.下列传动方式,轮的旋转方向相同的两项是?()A. 齿轮平行啮合B. 链传动C. 皮带平行传动D. 皮带交叉传动试题编号:20240307091728062试题类型:多选题标准答案:B|C试题难度:一般试题解析:考生答案:B|C考生得分:4是否评分:已评分评价描述:32.下列能增大摩擦力的选项有哪些?()A. 在轮胎上制造花纹B. 路面结冰时在路面上撒些砂石C. 拧不开瓶盖垫一个毛巾再拧D. 使用健身器材时在手上涂抹防滑粉试题编号:20240307091726334试题类型:多选题标准答案:A|B|C|D试题难度:一般试题解析:考生答案:C|B|D|A考生得分:4是否评分:已评分评价描述:33.下列哪些机构含有曲柄?()A. 曲柄摇杆机构B. 双摇杆机构C. 双曲柄机构D. 反向双曲柄机构试题编号:20240307091727654试题类型:多选题标准答案:A|C|D试题难度:试题解析:考生答案:A|D|C考生得分:4是否评分:已评分评价描述:34.如图,关于该棘轮机构说法正确的两项是?()A. 这是外啮合棘轮机构B. 这是内啮合棘轮机构C. 这是摩擦式棘轮机构D. 这是齿式棘轮机构试题编号:20240307091727716试题类型:多选题标准答案:B|D试题难度:一般试题解析:考生答案:B|D考生得分:4是否评分:已评分评价描述:35.静摩擦力的产生条件包括哪两项?()A. 两物体之间相互接触B. 两物体之间不能接触C. 两物体有相对运动趋势D. 两物体正在发生相对运动试题编号:20240307091725770试题类型:多选题标准答案:A|C试题难度:试题解析:考生答案:C|A考生得分:4是否评分:已评分评价描述:三、判断题(共10题,共20分)36.皮带传动只有皮带平行传动一种方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
几种常见比赛模式总结
PM_BEFORE_KICK_OFF (开球前模式) PM_KICK_OFF (开球) PM_PLAY_ON (正常比赛模式) PM_KICK_IN / PM_CORNER_KICK / PM_GOAL_KICK / PM_FREE_KICK / PM_BACK_PASS / PM_OFFSIDE (特殊模式) PM_TIME_OVER (时间结束)
2010安徽工业大学机器人足球仿真2D技 术交流
童飞飞
安徽工业大学
2010.3
综述
硬件实体 仿真虚拟
规 则
Linux
仿真平台
Client
申请 演出, 节目 内容, 人数
演员和剧 组
Client 个人世界模型
出场 顺序, 临近 出场 前后 情况
2D
3D
所有演 MSRS 员演出 的直播 和录播
Monitor
比赛规则
5.比赛模式控制Play-Mode Control 当比赛模式是开球kick_off,界外球 kick_in,或者角球corner_kick时,裁判 在足球因为kick命令产生移动时,马 上把比赛模式设置为正常play_on。
比赛规则
6.中场时间和终场时间Half_Time and Time_Up 当上半场或下半场结束时,裁判暂时挂起 比赛。每个半场的默认值是3000个仿真周 期(大约5分钟)。如果在下半场结束后, 还是平局的话,会进行加时赛。直到一方 进球为止,就是被称为“金球”规则或 “突然死亡法”. 点球大战
。。。
场地和球员
仿真环境中足球场和全部对象都是2维,无高度概 念。 比赛场地的尺寸为 Field_Length*Field_Width(105*68) 球门宽度为Goal_Width(14.64),是实际的两倍 球员和球用圆圈表示,动作是一个离散的过程, 每个仿真周期结束时动作执行一次。 在每个仿真周期结束前,server接受所有球员命 令并执行,最后利用场上对象的位置和速度信息 来计算出新的信息,以更新世界模型。
Server简介
server是以离散的时间间隔(或周期)工作 的实时系统。每个时间周期都有确定的分 时,为了在某个周期执行,动作必须在正 确的间隔到底server。因此,缓慢的反应会 对球队的性能产生很大的影响,它会造成 丢失执行动作的机会。
仿真周期的介绍
一场比赛 6000周期 = 10分钟 上下半场各3000个仿真周期(5分钟) 1周期 = 100ms
Client命令协议 介绍的是client向server发送的主要 命令以及命令采取的格式。(包括连接) Client感知协议 介绍的是client可以从server那里得 到什么信息的协议格式。
基本命令协议
1. catch Direction
• 球员抓球动作。守门员是唯一能执行catch命 令的球员。守门员可以从任何方向抓到足球, 只要足球在可抓范围内,守门员在罚球区内, 且比赛模式是“play_on”。如果守门员以δ 角度去catch足球,那么可抓范围是长宽分别 是catchable_area_l和catchable_area_w 的矩形区域。如果足球在这个矩形区域内,能 够被抓到的可能性是catch_probability,在 外面则不能被抓到。
3.出界Out of Field 当足球出界时,裁判把足球放到一个合适 的位置(边线,角球区或球门区)并 且把比赛模式置为界外球kick_in,角球 coner_kick,或者球门球goal_kick。如 果是角球的话,裁判将把足球放到场内正 确的角球区坐标(1m,1m)处。
比赛规则
4.清场Player Clearance 当比赛模式是开球kick_off,界外球kick_in,或角球 corner_kick时,防守队员移出以足球为圆心,9.15m为 半径的圆形区域。被移出的球员随机放置在圆形区域的周 围。如果比赛模式是越位offside,所有的进攻球员被移 回到没有越位的位置。这种情况下的进攻球员是指在越位 范围内的所有球员以及位于以足球为圆心9.15m为半径的 圆形区域内。如果比赛模式是球门球goal_kick,所有的 进攻球员会被移到罚球区外。当球门球发生时,进攻球员 不能重新进入罚球区。当足球被踢出罚球区后,比赛模式 马上被设置为正常play_on。
Server及logP安装和启动
首先解压rcssbase和rcssserver,并进入各 自目录下进行安装。
• -> ./configure • -> make • -> make install
然后解压rcsslogplayer,同样进入该文件夹 目录下进行安装。 打开终端,输入rcssserver (启动server) 输入rcsslogplayer启动监视器。
Angel
• 球员转脖子动作。是在独立于球员身体的转动头颈。 球员的头部角度是他的视野角度。命令turn改变球员 的身体角度,而命令turn_neck则改变了球员相对他 的身体的颈部角度。球员颈部的相对角度介于 minmoment和maxmoment之间(在文件 serever.conf中定义)。 • 切记头颈角度是相对于球员身体的相对角度,如果球 员执行了turn命令,而没有执行turn_neck命令, 球员的视野角度也是会改变的。
WorldModel世界模型的更新 通过Monitor来显示出来 UDP/IP 通信(11个进程)
按照策略向 server发送命令 来执行各种基本 的复杂的动作等
从server获取各种 感官信息来更新球 员的一个世界模型 来辅助决策
仿真2D的基本开发技术
比赛过程以 及Server介 绍 基于uva的 基本决策过 程 高层决策介 绍
基本命令协议
2. turn Moment
• 球员的转身动作,其参数moment属于minmoment 和maxmoment(缺省为 到 )组成的区间。在球员 运动的过程中,由于惯性的存在,转身更为困难。 • 当一个球员以最大速度前进时,他最大可以转过的角 度是正负120°。
基本命令协议
3. turn_neck
Object
身体方向 脖子方向
FieldOject <position >
MobileObject
<direct/distance /speed>
Line <line_id>
速度 体力
Stationary Object
球员号码 所属球队
Player
BALL
<team/side/Body_ dire Face_dire/nack)dire >
Server简介
当球员和server连接上后,所有的信息都通过这 个端口传递。球员发送他们下一步要做的动作请 求给server(如踢球kick,转身turn,dash等)。 Server接收到这些消息后,执行请求,并相应的 更新环境。 另外,server向所有的球员提供感知sensory信息 (如:关于足球,球门和其他球员的位置可视信 息)。球员用于更新自身世界模型。
对象的运动模式
各种运动模式均符合正常的物理运动规律。 如速度、加速度、速度衰减等等。 对象的加速度通过Kick(针对球)和 Dash(针对球员)两个原子命令的有效 power值来计算。 有效值概念出于球员身体方向、距离、速 度等客观原因对kick和dash力度的影响。
Server控制协议
比赛基本规 则 球场及各种 协议的定义
仿 真 2D
底层、流程 控制浅析
球员决策
高级动作决 策
特殊模式决 策
Monitor--标准仿真2D球场
返回
Server简介
Soccer server 是一个系统(程序)。它可以 两者关心的仅仅是通过通讯从 使Agent进行足球对抗比赛。这些Agent使用 对方获取的 决策请求 符合一定协议的字符串 不同程序语言进行设计。 Client / server,所以对球队的开发编译没有任 何限制。 (Daj375jha2h4f2if…) Server根据请求 唯一要求就是:球队的开发工具提供通过 Client根据信息反馈 Client UDP/IP连接的client/server支持。这是因为 server 各自更新世界模型 server和每个client之间的通讯都是通过 …(acdefghijklmnopq) UDP/IP端口实现的。每个client都是独立的进 程,通过给定的端口和server连接。 一支球队可以有最多11个client(或者说是球 请求信息反 员)。 馈
Start
返回
比赛规则
在比赛中,由server中的自动裁判和人类裁 判来共同执行大量的规则。这节就是解释 这些规则是如何工作,它们是怎么影响比 赛的。
比赛规则
1.开球Kick-Off 在kick off之前(比赛开始前,和进球后), 所有的球员都必须在她自己的半场。为了 能够达到这样,在每次进球得分后,采取 把比赛挂起5s时间。在这个间隔中,球员 可以使用move命令移动到某点,而不是跑 向这个点,这样会既费时又费体力 stamina。如果在5s结束后,球员还呆在 对方的半场,裁判会把她移到她们自己半 场的随机位置。
比赛球员的动作决策,包括球员从server 信息的获取都是严格按照仿真周期来进行。 刚刚提到的离散时间间隔就是由此而来的。
定期获取最新版的server
获取Soccer server /project/sserv er/ /server/ (Germany)
比赛规则
2.进球Goal 如果一个球队进球得分,裁判要作很多事 情。首先,她向所有的球员广播进球信息。 然后更新比分,将球移到中点,并把比赛 模式置为kick_off_x(x是left或right,代 表左半场球队或右半场球队)。最后,她 将比赛挂起5s,在此期间球员回到自己的 半场。