饱和非线性的描述函数
自动控制原理-第9章 控制系统的非线性问题

9 控制系统的非线性问题9.1概述在物理世界中,理想的线性系统并不存在。
严格来讲,所有的控制系统都是非线性系统。
例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。
当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。
实际上,所有的物理元件都具有非线性特性。
如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。
图9-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机工作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。
但如果电动机的工作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。
图9-1 伺服电动机特性9.1.1控制系统中的典型非线性特性的类型常见典型非线性特性有饱和非线性、间隙非线性、死区非线性、继电非线性等。
9.1.1.1饱和非线性控制系统中的放大环节及执行机构受到电源电压和功率的限制,都具有饱和特性。
如图9-2所示,其中a x a <<-的区域是线性范围,线性范围以外的区域是饱和区。
许多元件的运动范围由于受到能源、功率等条件的限制,也都有饱和非线性特性。
有时,工程上还人为引入饱和非线性特性以限制过载。
图9-2 饱和非线性9.1.1.2不灵敏区(死区)非线性控制系统中的测量元件、执行元件等一般都具有死区特性。
例如一些测量元件对微弱的输入量不敏感,电动机只有在输入信号增大到一定程度的时候才会转动等等。
如图9-3所示,其特性是输入信号在∆<<∆-x 区间时,输出信号为零。
超出此区间时,呈线性特性。
这种只有在输入量超过一定值后才有输出的特性称为不灵敏区非线性,其中区域∆<<∆-x 叫做不灵敏区或死区。
非线性仿真
2.5系统非线性环节的仿真在实际系统中,往往存在各种非线性特性,可将此当作非线性环节处理,这种环节的输入和输出之间关系是一种非线性函数关系,因此非线性环节的仿真就是用仿真语言来描述这些关系。
本节介绍几种典型的非线性环节的仿真算法。
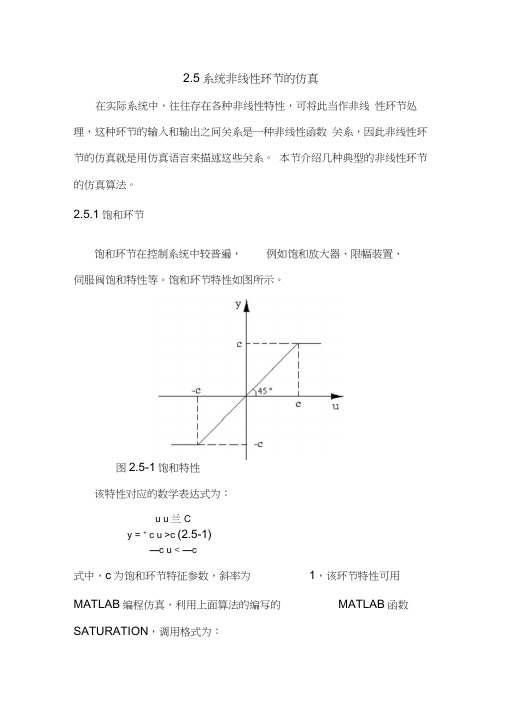
2.5.1饱和环节饱和环节在控制系统中较普遍,例如饱和放大器、限幅装置、伺服阀饱和特性等。
饱和环节特性如图所示。
图2.5-1饱和特性该特性对应的数学表达式为:u u兰Cy = * c u >c (2.5-1)—c u < —c式中,c为饱和环节特征参数,斜率为1,该环节特性可用MATLAB编程仿真,利用上面算法的编写的MATLAB函数SATURATION,调用格式为:y = saturation (u,c)其中,u为输入;c为饱和环节特征参数,y为饱和环节输出Saturati on.m; amp209.m2.5.2死区环节在控制装置中,放大器的不灵敏区,伺服阀和比例阀阀芯正遮羞特性,传动元件静摩擦等造成的死区特性。
典型死区非线性环节特性如图2.5-2所示。
可用下面数学关系来描述:0 u兰cy = * u -c u >c (2.5-2)u + c u c —c式中,c为死区特征参数,斜率为1。
该环节可根据上述算法编写MATLAB函数deadzone供调用,格式如下:y 二deadzone(u, c)其中,u为环节输入;c为死区环节特征参数,y为死区环节输出。
Deadz on e.m; amp210m齿轮传动副和丝杆螺母传动副中存在传动间隙都属这一类非线性因素,它对系统精度带来影响。
齿隙非线性环节特性如图2.5-3所示。
图2.5-3齿隙特性当输入u增加时,输出沿a > b > d线段变化;当输入u减小时,输出沿d >e > a线段变化。
在线段bd上,输入增加时,当前输出值y(k)总是大于前一时刻的输出值y(k-1)。
而在ea上,输入减小时,当前输出y(k)总是小于前一时刻的输出值y(k-1)。
自动控制原理第七章非线性控制系统的分析
这里,M=3,h=1
负倒描述函数为
N 1 X
X
12 1 1 2
X
X 1
X 1, N 1 X , N 1
必有极值
d N 1X 令
0 dX
得 X 2
N 1 2
2
0.523
12
1
1 2
2
6
X: 1 2
-N-1(X): 0.523
2.自振的稳定性分析
在A点,振幅XA,频率A。
扰动:
X : A点 C点 C点被G(j)轨迹包围,不稳定,
振幅 ,工作点由C点向B点运动;
A点一个不稳 定的极限环。
X : A点 D点 D点不被G(j)轨迹包围,稳定,
振幅 ,工作点由D点左移。
在B点,振幅XB,频率B 。 扰动:
X : B点 E点 E点不被G(j) 轨迹包围,稳定,
振幅 ,工作点由E点到B点;
X : B点 F点 F点被G(j)轨迹包围,不稳定,
振幅 ,工作点由F回到B点。
B点呈现稳定的自激振荡:振幅XB ,频率B。
3.闭环系统稳定性判别步骤
1)绘制非线性部分的负倒描述函数曲线和线 性部分的频率特性曲线。
2)若G(j)曲线不包围“-N-1(X)”曲线,则系统稳定。 若G(j)曲线包围“-N-1(X) ”曲线,系统不稳定。 若G(j)曲线与“-N-1(X)”曲线相交,系统出现自振。
3)若G(j )曲线与“-N-1(X)”曲线有交点,做以 下性能分析:
(1)不稳定的极限环
(2)稳定的极限环 计算自振频率和幅值。
例1:非线性系统如图所示,其中非线性特性为 具有死区的继电器,分析系统的稳定性。
0e
自动控制原理第9章
• 3)李雅普诺夫第2法
• 9.2
描述函数法
图9.6
非线性控制系统典型结构图
图9.7
非线性元件
• 描述函数法的基本思想是将非线性元件输
出中的基波分量代替实际的非正弦周期信
号,而略去信号中的高次谐波。这样处理
后,就与线性元件在正弦信号信用下的输
出具有形式上的相似,可以仿照幅相频率
特性的定义,建立非线性元件的近似幅相
第9章
非线性控制系统
• 本章先介绍自动控制系统中常见的典型非
线性特性,在此基础上介绍分析非线性控 制系统的常用2种方法——描述函数法和相
平面法。
• 9.1
• 9.1.1
• (1)
非线性控制系统概述
典型的非线性特性
• 图9.1是饱和非线性的静特性。图9.1中e(t) 为非线性环节的输入信号,x (t)为非线性环
继电器总有一定的吸合电压值,所以特性
必然出现死区和回环,学表达式为:
图9.4
继电器特性
(9.4)
• (5)
• 变放大系数特性如图9.5所示。其数学表达 式为: (9.5)
• 9.1.2
非线性系统的特性
• 非线性元件系统与线性控制系统相比,有 如下特点:
-1/N (A)曲线示于图9.21。由:
图9.21
例1的奈氏图
• 用试算法或作图法解得A =2.47。
• ②-1/N(A)与G(jω)的不相交,即ReG(jω)>1/2时,系统退出自振。ReG(jω)=-1/2时的 K值为临界放大倍数。
• 解得K临=7.5。
• 9.4
• 9.4.1
相轨迹
• 设二阶系统微分方程式的一般形式为:
图9.20
自动控制原理(8-2)

即y(t)为t的奇对称函数,直流分量为零。
A1,B1按下式计算:
1 2π 2 π A1 = ∫ y (t ) cos ωt dωt = ∫y (t ) cos ωt dωt π 0 π 0
1 2π 2 π B1 = ∫ y (t ) sin ωt dωt = ∫y (t ) sin ωt dωt π 0 π 0
二、典型非线性特性的描述函数
1.理想继电器特性
x(t ) A sin t
M y(t ) M (0 t ) ( t 2 )
傅氏展开
y(t ) A0 ( An cos nt Bn sin nt )
n 1
斜对称、奇函数→A0=A1=0
若非线性环节特性为输入的奇函数,则直流分量为
零。 当 f ( x) =-f ( -x) 时,则有
π π y (t + ) = f [ A sin ω(t + )] = f [ A sin (π + ωt )] ω ω = f( -A sin ωt ) = f ( -x) =-f ( x) =-y (t )
函数N也为零,故死区特性描述函数为:
2k k N 0
2 a a a arcsin 1 X X X
( X a) (X a )
4.死区饱和特性
0,
0 ≤ ωt ≤ ψ1 π ψ 2 ≤ ωt ≤ 2
y (t ) = K ( A sin ωt-Δ), ψ1 ≤ ωt ≤ ψ 2 K (a-Δ),
Δ ψ1 = arcsin A
ψ 2 = arcsin a A
由于y(t)为奇函数,所以A0=0,A1=0,而y(t)又为半
《自动控制原理》描述函数法
y(t)为非正弦的周期信号,因而可以展开成傅里叶级数:
y(t) = A0 + (An cos nwt + Bn sin nwt) = A0 + Yn sin(nwt + n )
n=1
n=1
其中,A0为直流分量, Yn sin(nwt + n ) 为第n次谐波分量,且有
Yn = An2 + Bn2
(8-60)
试计算该非线性特性的描述函数
解
x=Asinwt
(8-62)
一般情况下,描述函数N是输入信号幅值A和频率w的函数。当非线 性环节中部包括储能元件时,其输出的一次谐波分量的幅值和相位
差与w无关,故描述函数只与输入信号幅值A有关。至于直流分量, 若非线性环节响应为关于t的奇对称函数,即
(线性环节可近似认为具有和线性环节相类似的频率响
应形式。为此,定义正弦输入信号作用下,非线性环节的稳态输出
中一次谐波分量和输入信号的复数比为非线性环节的描述函数,用
N(A)表示:
N ( A) = N ( A) e jN (A) = Y1 e j1 = B1 + jA1
A
A
例8—3 设继电特性为
则由式(8-58)
取变换
,有
而当非线性特性为输入x的奇函数时,即f(x)=-f(-x),有
y(t + ) = f [Asin w(t + )] = f [Asin( + wt)] = f [− Asin wt]
w
w
= f (−x) = − f (x) = − y(t)
即y(t)为t的奇对称函数,直流分量为零。 , 按下式计算:
另外,描述函数法只能用来研究系统的频率响应特性,不能给出时 间响应的确切信息。
自动控制原理-第8章 非线性控制系统教案

8 非线性控制系统前面几章讨论的均为线性系统的分析和设计方法,然而,对于非线性程度比较严重的系统,不满足小偏差线性化的条件,则只有用非线性系统理论进行分析。
本章主要讨论本质非线性系统,研究其基本特性和一般分析方法。
8.1非线性控制系统概述在物理世界中,理想的线性系统并不存在。
严格来讲,所有的控制系统都是非线性系统。
例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。
当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。
实际上,所有的物理元件都具有非线性特性。
如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。
图8-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u 为电机的控制电压,纵坐标ω为电机的输出转速,如果伺服电动机工作在A 1OA 2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。
但如果电动机的工作区间在B 1OB 2区段.那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。
图8-1 伺服电动机特性8.1.1控制系统中的典型非线性特性组成实际控制系统的环节总是在一定程度上带有非线性。
例如,作为放大元件的晶体管放大器,由于它们的组成元件(如晶体管、铁心等)都有一个线性工作范围,超出这个范围,放大器就会出现饱和现象;执行元件例如电动机,总是存在摩擦力矩和负载力矩,因此只有当输入电压达到一定数值时,电动机才会转动,即存在不灵敏区,同时,当输入电压超过一定数值时,由于磁性材料的非线性,电动机的输出转矩会出现饱和;各种传动机构由于机械加工和装配上的缺陷,在传动过程中总存在着间隙,等等。
实际控制系统总是或多或少地存在着非线性因素,所谓线性系统只是在忽略了非线性因素或在一定条件下进行了线性化处理后的理想模型。
第七章(非线性系统的描述函数法)

§7.4非线性系统的描述函数分析法一、描述函数法的基本概念假设非线性系统的输入函数为)sin()(t X t x ω=非线性环节Nx (t )n(t )输出n(t)将是非正弦的周期信号。
可以展成傅利叶级数,n(t)是由恒定分量、基波分量、和高次谐波组成。
假设1:如果非线性部分的特性曲线具有中心对称性质,那以输出信号n(t)的波形具有奇次对称性(波形的后半个周期重复前半个周期的变化,但符号相反)输出不含直流分量,输出响应的平均值为零。
假设2:线性部分具有良好的低通滤波性,那么高次谐波的幅值远小于基波。
闭环通道内近似地只有一次谐波信号流通。
对于一般的非线性系统而言这个条件是满足的,线性部分的低通滤波性越好,用描述函数法分析的精度越高。
上述两个假设满足时,非线性环节的输入是一个正弦信号,系统的输出是相同频率的正弦信号,对于非线性环节的输出只研究其基波成分就足够了。
假设系统中非线性环节的输入函数为tX t x ωsin )(=输出信号可以展成傅利叶级数∑∑∞=∞=++=++=1010)sin(2)cos sin (2)(i i i i i i t i Y A t i B t i A A t n ϕωωω⎰=πωωπ20)()cos()(1t d t i t n A i ⎰=πωωπ20)()sin()(1t d t i t n B i 22iii BA Y +=iii B A tg1-=ϕ若非线性部分是齐次对称的,则A 0=0,线性部分又具有低通滤波特性,可以认为非线性环节的输出中只有基波分量能够通过闭环回路反馈到输入端。
输出部分的基波分量为)sin(cos sin )(11111ϕωωω+=+=t Y t B t A t y ⎰=πωωπ201)()cos()(1t d t t n A ⎰=πωωπ201)()sin()(1t d t t n B 21211B A Y +=1111B A tg -=ϕ可以用一个复数来描述非线性环节输入正弦信号和输出信号基波的关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
死区非线性的数学表达式为
0 x(t ) K n ( A sin ωt a)
y(t)为单值奇对称函数,故有
0 ωt θ1 π θ1 ωt 2
2K n C ( A) 0 ,B( A) π
式中 所以其描述函数为
π a a 2 A 1 a பைடு நூலகம்sin 1 ( ) K B ( ) n 0 A A A a 2
由于描述函数是非线性元件的等效传递特性,它是在只考虑基波分量之后 得到的结果,所以这种近似处理方法又称为“谐波线性化法”。 当非线性元件用描述函数表示后,就可以用线性理论中的频率法来研究非 线性系统的基本特性。
二、典型非线性特性的描述函数
1、饱和非线性的描述函数 饱和非线性如图所示。
饱和特性数学表达式为:
它是一条在实轴上沿着
1为终点。
变化的直线,起自
,随着
增长,以-
1 ~
a A
3、回环(间隙)非线性的描述函数
当输入为正弦函数x(t)=Asinωt 时,回环(间隙)非线性具有非单值特性, 回环非线性曲线及其输入-输出波形如图所示。
回环(间隙)非线性的数学表达式为:
K n ( A sin ωt α ) y (t ) K n ( A ε ) K ( A sin ωt α ) n
利用富氏级数展开,有
y(t ) Y0
(B
k 1
k
sin kωt Ck cos kωt )
k 1,2,
(3)
式中:Y0是输出信号中的直流分量; Bk和Ck是输出信号中各次谐波分量的幅值,在一般情况下是输入信号幅值A和 频率ω
(2)设非线性环节的输出是对称奇函数,则式(3)中的偶次项等于零,上式可简
式中
(6)
C ,或写成 Y1 B12 C12 , φ tan 1 1 B1 根据富氏级数的系数项公式,有
B1 Y1 cos φ1 , C1 Y1 sin φ1
1 2π B1 y(t ) sin ωtdωt π 0 1 2π C1 y(t ) cos ωtdωt π 0
θ1 sin
1
a A
2K n N ( A) B( A) jC( A) π
死区非线性的基准描述函数为
π a a 2 1 a 1 ( ) sin A A A 2
N 0 ( A)
N ( A) A B0 ( ) Kn a
从死区非线性的描述函数表达式可以看出,死区非线性的描述函数也只有一个 实部。在复平面上,可绘出死区非线性的基准描述函数负倒数曲线,如下图所示。
(7) (8)
式(6)可写成矢量形式:
输入正弦函数也写成矢量形式,有
Y Y1e j (ωt φ1 )
Y X
.
(9)
X Ae jωt
Y1 jφ1 e A
(10)
令
N ( A)
将上式写成复数的形式,有
Y1 Y1 B1 C1 N ( A) cos φ1 j sin φ1 j B( A) jC( A) (11) A A A A
实际上,在确定自振荡频率ω和幅值A时,常用基准描述函数的负倒 数 ,对于饱和非线性,它的基准描述函数的负倒数为 , 1 N 0 ( A) (-1,j0)点,随着 把它画在复平面上,是一条起自 的增长,沿负实轴向 1 左延伸的直线, A B0 ( ) a
a
A
2
当输入为正弦函数x(t)=Asinωt时,死区非线性及其输入输出波形如图所 示。
0 ωt
π ωt π θ1 2 π θ1 ωt π
π 2
y (t 为奇对称,但非单值 )
K B( A) n π π 2a 2a a a 1 (1 ) K n B0 ( A) sin (1 ) 2(1 ) A A A A 2 K 4a a A C ( A) n ( 1) K nC0 ( ) πA A a
y(t )
(B
k 1
k
sin kωt Ck cos kωt )
k 1,3,5,
(4)
上式表明,非线性环节的输出量含有高次谐波。 (3)设系统的线性部分具有低通滤波器特性。于是对整个系统来说,高次谐波可以忽 略。这样式(4)可进一步简化为
y(t ) B1 sinωt C1 cos ωt Y1 (sinωt φ1 )
K n A sinωt y (t ) K nα
0 ωt θ1 π θ1 ωt 2
( θ sin1 ) 1
由于y(t)为单值奇对称函数,故有,
2K n a C ( A) 0 , B( A) (θ1 cosθ1 ) π A
其描述函数为
a A
2K n N ( A) π
式中
B1 1 B( A) A πA C 1 C ( A) 1 A πA
y (t ) sin ωtdωt 0 2π y (t ) cos ωtdωt 0
2π
(12)
式(11)为该非线性环节的描述函数
描述函数的定义
非线性环节在正弦函数输入下,输出中的一次谐波(基波)分量和输入正弦波 的矢量比(写成复数的形式)来描述该非线性的特征,这个比值称为该非线性环节 的描述函数。 这相当于用一个等效的线性环节代 替了原来的非线性环节,而等效线性环 节的幅相特性函数N(A),是输入函数x(t) =Asinωt幅值A的函数,等效的结构图 如图所示。
§7-2 描述函数法
一、描述函数的基本概念
非线性系统的结构图如图所示。图中 G(s)为线性部分的传递函数,N为非线性 元件。 (1)设非线性环节N 的输出量只和输入量有关,即y=f(x)。 设输入为:
x(t ) A sin t
(1) (2)
非线性环节的输出为:
y (t ) f ( A sinωt )
1 a a a 2 A sin 1 ( ) K B ( ) n 0 A A A a
可见,饱和非线性的描述函数虚部为零,只有一个实部。 基准描述函数
A 2 1 a a a 2 N 0 ( A) B0 ( ) sin 1 ( ) a π A A A