发动机神经网络自适应PID转速控制
基于BP神经网络的自适应PID控制器设计

基于BP 神经网络的自适应PID 控制器设计一.基于BP 神经网络的自适应PID 控制器的原理PID 控制是最早发展起来的、 应用领域至今仍然广泛的控制策略之一,它是基于对象数学模型的方法,尤其适用于可建立精确数学模型的确定性控制系统。
其优点是算法简单、 鲁棒性好和可靠性高。
但是,由于实际工业生产过程往往具有非线性,许多非线性系统难以确定精确的数学模型,常规的PID 控制器就不能达到理想的控制效果,由于受到参数整定方法烦杂的困扰,参数往往整定不良、 性能欠佳。
神经网络所具有的任意非线性表达能力,可以通过对系统性能的学习来实现具有最佳组合的PID 控制。
基于BP 网络的自适应PID 控制器,通过BP 神经网络调整自身权系数,对PID 控制参数进行调节,以达到某种性能指标的最优。
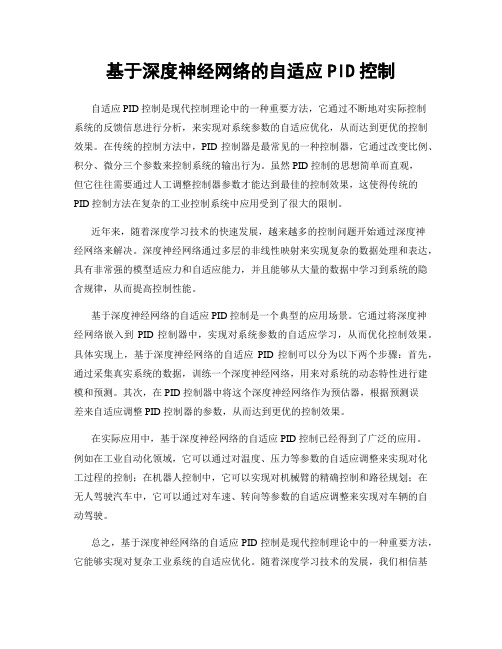
二.基于BP 神经网络的自适应PID 控制器的控制器结构基于BP 神经网络的PID 控制系统结构图如图1所示:此控制器由两部分组成:(1)经典的PID 控制器,直接对被控对象进行闭环控制,并且三个参数p K ,i K ,d K 为在线调整方式;图1 BP 网络结构p ki kd ki(2)神经网路,根据系统的运行状态,调节PID 控制器的参数,以期达到某种性能指标的最优化,是输出层神经元的输出状态对应于PID 控制器的一个可调参数p K ,i K ,d K 。
通过神经网络的自学习、加权系数调整,使神经网络输出对应于某种最优控制率下的PID 控制器参数。
基于BP 神经网络的自适应PID 控制器的控制器如图2所示:该控制器的算法如下:(1)确定BP 神经网络的结构,即确定输入节点数M 和隐含层节点数Q ,并给各层加权系数的初值)0(1ij w 和)0(2ij w ,选定学习速率η和惯性系数α,此时k=1; (2)采样得到rin(k)和yout(k),计算该时刻误差error(k)=rin(k)-yout(k);(3)计算神经网络NN 各层神经元的输入、输出,NN 输出层的输出即为PID 控制器的三个可调参数p K ,i K ,d K ;(4)根据经典增量数字PID 的控制算法(见下式)计算PID 控制器的输出u(k); ))2()1(2)(()())1()(()1()(-+--++--+-=k error k error k error K k error K k error k error K k u k u d i p (5)进行神经网络学习,在线调整加权系数)(1k w ij 和)(2k w ij 实现PID 控制参数的自适应调整;(6)置k=k+1,返回到(1)。
发动机传动电机的转速控制BPPID
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢迎下载支持。
目录一、设计题目······································································································错误!未定义书签。
二、系统的工作原理 ··························································································错误!未定义书签。
自适应调速系统中的PID控制算法研究
自适应调速系统中的PID控制算法研究近年来,随着科技的不断发展,各种电机设备的应用也越来越广泛,电机的控制系统也得到了很大的提升。
在各种电机设备的控制系统中,PID控制算法是一种应用较为广泛的算法。
而在自适应调速系统中,PID控制算法也占据着非常重要的地位。
本文将从自适应调速系统的特点、PID控制算法的原理和应用、以及PID控制算法在自适应调速系统中的研究方面进行论述。
一、自适应调速系统的特点自适应调速系统是一种非常特殊的电机控制系统,它具有以下几个特点:1.系统的动态性能要求高一般来说,自适应调速系统中的电机设备应用较为广泛,因此系统的动态性能要求非常高。
对于电机设备的控制与调速,系统需要快速、准确地响应,并能够带来稳定的运行效果。
2.系统具有较好的鲁棒性在自适应调速系统中,电机设备的应用场景因工作环境,受电源质量等多种因素的影响可能发生不确定的变化,而这些变化可能对系统带来很大的影响。
因此,自适应调速系统需要具备较好的鲁棒性,能够在各种环境条件下运行并稳定工作。
3.系统需要进行参数自适应、智能化控制自适应调速系统中的电机设备在运行的过程中,经常会面临着电流、电压、转速等参数的变化,在不同的工况下需要进行多种参数的自适应控制。
因此,自适应调速系统需要具备智能化控制,能够自动调节各种参数,实现最佳的运行效果。
二、PID控制算法的原理和应用PID控制算法是一种比较经典的控制算法,PID分别代表比例、积分、微分三个单词。
PID控制算法能够将控制系统的误差与控制输出之间的比例、积分和微分相结合,从而实现对系统的稳定控制。
更为具体的讲,PID控制器可以分为比例、积分、微分三部分:1. 比例部分比例部分是最简单、最容易实现的控制部分,它的主要作用是根据误差得出控制器的输出。
比例部分的输出与误差成比例,即输出值等于误差乘以系数Kp,其中Kp为比例系数。
2. 积分部分积分部分可以消除误差的稳定偏差,将慢速的反馈信号加入到控制器的输出中,从而实现控制系统当前误差和历史误差的累计。
自适应pid控制方法
自适应pid控制方法
自适应PID控制方法是一种基于PID控制器的改进控制方法。
它通过对系统参数进行实时监测和调整,自动调整PID控制器的参数,以适应系统参数变化和不确定性的影响。
这种控制方法能够有效提升系统的稳定性和响应速度,降低控制误差和能耗。
自适应PID控制方法主要分为两种类型:基于模型参考自适应PID控制和基于模型自适应PID控制。
前者通过建立系统模型,将模型输出与实际输出进行比较,从而调整PID参数;后者则是利用经验模型或数据模型,直接从实际输出中提取参数并进行调整。
这两种方法各有优缺点,选择合适的方法需要根据具体应用场景来决定。
自适应PID控制方法在工业自动化、机器人控制、航空航天等领域得到了广泛应用。
未来,随着智能化和自动化技术的不断发展,自适应PID控制方法将会有更广泛的应用和更深入的研究。
- 1 -。
基于神经网络的自适应PID控制策略研究
基于神经网络的自适应PID控制策略研究近年来,神经网络技术逐渐成为控制领域中的热点研究方向之一。
在控制领域中,PID控制器是最常用的一种控制器,但是,在复杂的非线性系统中,PID控制器可能会失效,因此需要一种更为智能化的自适应控制策略。
本文将着重研究基于神经网络的自适应PID控制策略的原理和应用。
一、神经网络控制简介神经网络控制是一种使用神经网络技术实现控制的控制方法。
神经网络具有自学习和自适应能力,能够适应未知的非线性因素,因此能够有效地提高控制精度。
在神经网络控制中,通常使用BP神经网络进行训练,将网络的输入与输出之间的关系建模,进而得到控制器。
二、PID控制器PID控制器是最常用的一种控制器,它由比例项、积分项和微分项组成。
其中,比例项控制系统的静态误差,积分项控制系统的稳态误差,微分项控制系统的动态响应。
经过调整PID参数,可以实现对系统的稳态和动态性能的优化。
三、传统PID控制器的缺点通过传统PID控制器的参数调整,可以得到较好的控制效果。
但是,在非线性系统控制中,PID控制器的参数调整会变得更加困难,可能会导致系统不稳定或控制精度不高。
这是因为传统PID控制器中的参数是固定的,无法根据系统的变化进行自适应调整。
因此,需要一种更为灵活、智能的自适应控制方式。
四、基于神经网络的自适应PID控制策略与传统PID控制器不同,基于神经网络的自适应PID控制器能够在实时控制过程中不断调整控制器参数,以应对不同的情况。
它能够根据系统的输入和输出实时调整控制器的权值,从而实现对非线性系统的自适应控制。
基于神经网络的自适应PID控制策略的实现方法,一般是将系统的输入和输出作为训练数据,通过训练得到神经网络的权值。
在控制器实时控制过程中,根据系统输出实时调整神经网络的权值,从而实现自适应控制。
五、应用实例基于神经网络的自适应PID控制策略在实际应用中,可以针对不同的场景进行多样化应用。
下面以一个灯光控制系统为例来进行说明。
基于神经网络的电机转速控制方案设计

基于神经网络的电机转速控制方案设计电机转速是控制电机工作的重要参数之一,合理的转速控制方案设计不仅可以保证电机的正常工作,还可以提高电机的效率和使用寿命。
基于神经网络的电机转速控制方案设计是目前研究的热点之一,本文将详细介绍基于神经网络的电机转速控制方案设计方法及其优势。
一、引言电机是一种将电能转化为机械能的装置,广泛应用于各个领域。
在许多应用中,电机的转速需要根据实际需求进行控制,如机械设备的调速、航空器和船舶的控制等。
传统的电机转速控制方法存在调节范围窄、响应速度慢、稳定性不高等问题,因此,基于神经网络的电机转速控制方案成为了一种新的解决方法。
二、基于神经网络的电机转速控制方案设计1. 神经网络的基本原理神经网络是一种模拟生物神经网络的人工智能方法,它通过模拟大脑神经元之间的连接和相互作用来实现学习和自适应能力。
神经网络由输入层、隐藏层和输出层组成,通过训练样本的学习,可以得到网络的权重和偏置,从而实现对输入数据的良好拟合。
2. 电机转速控制方案设计步骤(1)数据采集:收集电机转速与输入变量的数据,如电压、电流、负载等。
需要足够多样的数据以保证训练的准确性和泛化能力。
(2)数据预处理:对采集的数据进行标准化处理,如归一化、去除异常值等,以提高神经网络的训练效果。
(3)网络结构设计:确定神经网络的层数和节点数,可以根据实际需求和数据情况进行调整和优化。
(4)样本划分:将采集的数据集划分为训练集、验证集和测试集,用于神经网络的训练、验证和评估。
(5)网络训练:使用训练集对神经网络进行训练,通过反向传播算法不断调整网络的权重和偏置,以提高网络的性能。
(6)网络验证与调优:使用验证集对已训练好的网络进行验证,并根据验证结果对网络进行调优,如调整学习率、增加正则化等。
(7)网络测试与应用:使用测试集对训练好的网络进行测试,并评估转速控制方案的性能和准确性。
(8)方案优化:根据测试结果对转速控制方案进行优化和改进,以进一步提高控制效果和稳定性。
基于BP神经网络的自适应PID控制器设计

基于BP神经网络的自适应PID控制器设计自适应PID控制器是一种基于BP神经网络的控制器设计方法,它结合了传统的PID控制器与神经网络的优势,可以适应系统参数变化、非线性和模型误差的情况。
本文将详细介绍基于BP神经网络的自适应PID控制器的设计原理和实现步骤。
1.简介PID控制器是一种经典的控制方法,通过计算误差的比例、积分和微分部分,调节输出控制量来实现对系统的控制。
然而,传统的PID控制器无法处理非线性和参数变化的系统,容易产生较大的误差。
而BP神经网络则具有非线性映射和自适应学习的能力,可以对非线性系统进行建模和控制。
2.BP神经网络的建模BP神经网络是一种前馈神经网络,具有输入层、隐含层和输出层。
输入层接收系统的输入量,输出层输出控制量,隐含层则通过一系列的神经元进行信息传递和处理。
BP神经网络通过训练集的样本进行学习,调整网络的权值和偏置,使得网络的输出与期望输出尽可能一致。
3.PID控制器的设计PID控制器由比例、积分和微分三个部分组成。
比例部分通过调节误差的大小来控制输出,积分部分可以控制持续的误差,微分部分则可以控制误差的变化率,提高系统的响应速度。
PID控制器的参数可以根据系统的特性进行调整。
4.自适应PID控制器的设计a.构建BP神经网络模型,通过训练集对模型进行学习,得到网络的权值和偏置。
b.使用PID控制器的比例、积分和微分部分计算出控制量,并将控制量作为输入量输入到BP神经网络中。
c.根据神经网络的输出,计算系统的输出,将其与期望输出进行比较,得到误差。
d.根据误差的大小,调整PID控制器的参数。
e.重复步骤b-d,直到系统达到期望输出。
5.应用实例自适应PID控制器可以应用于各种系统的控制中,如温度控制、位置控制等。
以温度控制为例,系统输入为温度传感器的读数,输出为控制器输出的控制量。
通过采集训练集数据和期望温度值,利用BP神经网络对系统进行建模和学习,然后根据PID控制器的参数计算出控制量,进而控制温度的变化。
基于深度神经网络的自适应PID控制
基于深度神经网络的自适应PID控制自适应 PID 控制是现代控制理论中的一种重要方法,它通过不断地对实际控制系统的反馈信息进行分析,来实现对系统参数的自适应优化,从而达到更优的控制效果。
在传统的控制方法中,PID 控制器是最常见的一种控制器,它通过改变比例、积分、微分三个参数来控制系统的输出行为。
虽然 PID 控制的思想简单而直观,但它往往需要通过人工调整控制器参数才能达到最佳的控制效果,这使得传统的PID 控制方法在复杂的工业控制系统中应用受到了很大的限制。
近年来,随着深度学习技术的快速发展,越来越多的控制问题开始通过深度神经网络来解决。
深度神经网络通过多层的非线性映射来实现复杂的数据处理和表达,具有非常强的模型适应力和自适应能力,并且能够从大量的数据中学习到系统的隐含规律,从而提高控制性能。
基于深度神经网络的自适应 PID 控制是一个典型的应用场景。
它通过将深度神经网络嵌入到PID 控制器中,实现对系统参数的自适应学习,从而优化控制效果。
具体实现上,基于深度神经网络的自适应PID 控制可以分为以下两个步骤:首先,通过采集真实系统的数据,训练一个深度神经网络,用来对系统的动态特性进行建模和预测。
其次,在 PID 控制器中将这个深度神经网络作为预估器,根据预测误差来自适应调整 PID 控制器的参数,从而达到更优的控制效果。
在实际应用中,基于深度神经网络的自适应 PID 控制已经得到了广泛的应用。
例如在工业自动化领域,它可以通过对温度、压力等参数的自适应调整来实现对化工过程的控制;在机器人控制中,它可以实现对机械臂的精确控制和路径规划;在无人驾驶汽车中,它可以通过对车速、转向等参数的自适应调整来实现对车辆的自动驾驶。
总之,基于深度神经网络的自适应 PID 控制是现代控制理论中的一种重要方法,它能够实现对复杂工业系统的自适应优化。
随着深度学习技术的发展,我们相信基于深度神经网络的自适应 PID 控制将会在更多的领域得到应用,并取得更加突出的成果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
时不可能面面俱到 (常会忽略一些不重要的参数,如
进气歧管截面积随温度的变化、 发动机的磨损情况
等), 常造成发动机模型不精确, 且式
进行研究,将神经网络同 PID 控制相结合,很好地解
决了发动机转速与燃油控制问题,可以使发动机在最
优状态下工作,对节能减排具有重要的现实意义。
化的增益参数。
2.3 仿真结果
仿真条件为:仿真软件为 MATLAB;发动机模型
如上所述;参数优化神经网络中 n=2,m1=2,m2=10,i=
32
农业科技与装备
2014 年 1 月
图 4 发动机模型辨识 NN 结构 Figure 4 Engine model identification NN structure
2014 年第 1 期
吴笑伟等:发动机神经网络自适应 PID 转速控制
31
分燃油量之和。
1.2 PID 算法
发 动 机 的 转 速 控 制 采 用 可 变 增 益 的 PID 方 法 ,
具体控制算法为:
α=Kpε+Ki∫εdt+Kddε/dt
(8)
式 中 :α 为 节 气 门 开 度 ;ε 为 转 速 误 差 ;Kp,Ki,Kd
负载小、发动机各种干扰小的转速控制。 仿真结果还
表明,PID 调节器的转速跟踪 (负载较大时) 效果很
差。
2 发动机转速的神经网络控制
2.1 发动机转速的 NC 设计 对如图 3 所示的控制结构进行研究。 神经网络
NN2 用于建立被控系统的动态模型 , 并为神经网络 NN1 的学习训练过程提供必要信息。 神经网络 NN1 根据系统的状态,不断调节 PID 控制器的增益,以达 到所规定的最优性能指标。
转速跟踪情况见图 2。
从图 2 的仿真结果可看出: 当发动机负载很低
(0.5 kW)或负载不大(5 确 kW),且设定转速不高(约
21000 rpm)时 ,PID 调 节 器 能 正 常 工 作 ;当 发 动 机 输
入有干扰时,PID 调节器失调; 当发动机负载有扰动
时,发动机转速不平稳。 这表明 PID 调节器只适应于
压力,MPa;发动机排量 Vd=1.275 m3。 ηV 是发动机的
容积效率。
ηV 为歧管压力的函数,可表示为:
ηV=0.952-0.075/p
(3)
式中:m觶 ap 可表示为两个并行的等嫡物理过程。 1.1.2 发动机曲轴系统动力学子模型 根据能量守恒定律 描述发动机中的热能向机械能的转换及做功过程。发
0~2(PID);模型辨识神经网络中选取 n=2,m1=2,m2= 10,i=0,仿真结果如图 6 所示。 从仿真结果可以看出, 神经网络自适应 PID 控制, 能有效抑制转速的超调 量,减小转速在调整过程中的波动。
3 结语
发动机是一个典型的非线性、时滞、时变系统。智 能控制能够将人类的智慧应用到控制系统中,解决非 线性、复杂的系统控制问题。 参照 Elbert Hendricks 发 动机模型建立发动机进气系统动力学、曲轴动力学和 油膜子模型,对发动机转速神经控制的结构和神经网 络的形式进行研究,采用神经网络自适应 PID 方法对 发动机转速控制进行计算仿真。 仿真结果表明,神经 网络自适应 PID 控制能有效抑制转速的超调量,减小 转速在调整过程中的波动。
摘要:为提高发动机怠速控制的准确性,解决非线性、复杂的系统控制问题,详细介绍发动机模型建立方法、转速神经控制的结构 和神经网络的形式,并将神经网络同 PID 控制很好的结合起来,以有效解决发动机转速控制问题。 关键词:发动机;神经网络自适应 PID;设计;转速控制;神经网络 中图分类号:U467.2 文献标识码:A 文章编号:1674-1161(2014)01-0030-03
发动机是一个典型的非线性、时滞、时变系统。智
能控制能够将人类的智慧应用于控制系统,解决非线
性、复杂的系统控制问题。 发动机的转速控制问题一
直是热点研究课题,特别是发动机的怠速控制更是研
究重点。 怠速转速是汽车发动机的主要性能指标之
一。 目前,虽然在发动机燃油控制方面的研究取得了
一定进展,但影响发动机性能的参数相当多,在建模
…,u(k-m)]
(10)
式中:y 为发动机的输出转速;u 为对发动机的控
制 (节气门开度);ym 为模型的输出;n,m 分别为 y(k)
和 u(k)的阶次;f 为非线性函数。
采用如图 5 所示的 BP 神经网络结构对 NC 控制
器中的参数(PID 中的增益)进行优化。 图 5 中,E(k)
为转速误差;P(k)为发动机负载因子 ;G1—G3 为要优
1 发动机模型与 PID 控制
1.1 发动机模型
丹麦技术大学 Elbert Hendricks 教授提出的发动
机模型具有较高精度。 参照 Elbert Hendricks 发动机
模型建立发动机进气系统动力学、曲轴动力学和油膜
子模型。
1.1.1 发动机进气系统动力学子模型 进气系统动力学描
述歧管中空气的质量变化率p觶 , 它是流经节气门的空
IEEE Transactions on Control Systems Technology,2006,51(7):1 200-1 207. [5] 王喜莲,葛宝明,伍召莉.基于柔性神经网络自适应 PID 的磁轴承径向力控制[J].北京交通大学学报,2012,36(2):85-90. [6] 王秋蓉,葛宝明.无轴承开关磁阻电机磁场及力特性的分析[J].电机与控制学报,2007,11(3):217-220.
The Neural Network Adaptive PID Speed Control on Engines
WU Xiaowei, SHI Leiming
(College of Automotive Engineering, Henan Jiaotong Polytechnic, Zhengzhou 450005, China) Abstract:In order to improve the accuracy of engine idle speed control, and to solve the control problem of nonlinear, complex system, this article offers a detailed description of the establishment of engine model, the structures of speed neuron control and the form of neural network, and combines neural network PID control, to effectively solve the problem of engine speed control. Key words: engine; neural network adaptive PID; design; speed control; neural network
图 1 PID 转速控制框图 Figure 1 PID speed control block diagram
控 制 方 案 的 PID 调 节 器 参 数 Kp,Ki,Kd 进 行 优 化 ,结 果为:Kp=1~2,Ki=1~2,Kd=0。
为对空燃比进行良好控制,现代汽车一般采用如
下的燃油控制方式:
m觶 fpc=
m觶 ap Lh
+KpIy+KiI∫ydt
(9)
式中:m觶 fpc 为进入发动机气缸所需要的燃油质量
流速;m觶 ap 为进入发动机气缸的空气质量流速 ;y 为氧 传 感 器 的 输 出 ;Lh 为 发 动 机 运 行 空 燃 比 , 汽 油 车 取 14.67~14.7;KpI,KiI 为控制器增益。 1.3 仿真结果
m觶 fv=(1-X)m觶 fc
(5)
m咬 ff=(Xm觶 fi-mff)/τf
(6)
m觶 fi=m觶 fv+m觶 ff
(7)
式中 :X 为燃油 沉 积系数 ;Tf 为油膜 蒸 发时 间 常
数。 它们随发动机工况变化,是发动机转速 n(或 ω)、
进气岐管压力 Pi、温度 Ti 等的非线性函数;m觶 fc 是按指 令喷射的燃油质量流量, 分为完全气化部分m觶 fv 和油 膜蒸发部分m觶 ff 两部分:m觶 fi 是气缸的总燃油量,为两部
图 6 NN-PID 转速控制仿真结果 Figure 6 NN-PID speed control simulation results
图 5 NC 控制中参数优化 NN 结构 Figure 5 The NC control parameter optimization of NN
structure
第 1 期 总第 235 期 2014 年 1 月
农业科技与装备 Agricultural Science&Technology and Equipment
No.1 Total No.235 Jan. 2014
发动机神经网络自适应 PID 转速控制
吴笑伟,史雷鸣
(河南交通职业技术学院 汽车学院,郑州 450005)
bearing system[J].IEEE/ASME Transactions on Mechatronics,2007,12(2):179-189. [4] FRANCO A L D,BOURLES H,DEPIERI E R.Robust nonlinear control associating robust feedback linearization and control [J].
发 动 机 PID 转 速 控 制 计 算 机 仿 真 的 条 件 如 下 :
仿真软件为 MATLAB6.5/SIMULINK; 发动 机 仿 真 模