利用MATLAB进行根轨迹分析
第4章 根轨迹法

C(s)
解:将MATLAB Program 4-1输入到计算机中,可得到系统 的根轨迹图,如后图所示。
第‹#›页
第4章 根轨迹法
%MATLAB Program 4-1 num=[0 0 0 1 3]; den=[1 5 20 16 0]; rlocus(num,den) v=[-6 6 -6 6]; axis(v);
s1, s2分别位于实轴区间上
第‹#›页
第4章 根轨迹法
当 kk=1 时 s1=s2=-1,两个闭环极点相遇 当 kk>1 时 s1,s2位于过点且平行于虚轴的直线上 当 kk→∞时 s1,s2将趋于无穷远处
第‹#›页
第4章 根轨迹法
将这些闭环特征根的数值标注在平面上,连成光滑粗 实线,就是系统的根轨迹,如下图所示:
j
s p
i 1
1
i
∠ (s-z )-∠ (s-p ) (2k 1)π,
j i j 1 i 1
m
n
k 0, ,2, 1
根轨迹上的点应同时满足的两个条件:
幅值条件和相角条件
第‹#›页
第4章 根轨迹法
由于幅值条件与 K g 有关,而相角条件与 K g 无关,所 以满足相角条件的任一点,代入幅值条件总可以求出一个 相应的值,也就是说满足相角条件的点,必同时满足幅值 条件。所以 相角条件是确定平面上根轨迹的充要条件。 注意: 绘制根轨迹时,只需要使用相角条件,只有当需 要确定根轨迹上各点的对应的值时,才使用幅值条件。
第‹#›页
第4章 根轨迹法
法则3 渐近线与与实轴的交角应改为
2k a ; k 0,1,2, ,n-m-1 nm 法则4 根轨迹在实轴上的分布应改为:实轴上的某一 区域,若其右边开环实数零、极点个数之和为偶数,则该 区域必是根轨迹。
(自动控制原理)第四章根轨迹(06改)
i 1 n
A( )e
j ( )
1 Kg
满足根轨迹方程的幅值条件和相角条件为:
由于Wk ( s )是复数,上式可写成:Wk ( s ) | Wk ( s ) A( )e j ( ) 1 | 或 A( )
| ( s z ) | li 1 | (s p j ) |
N z N p 1 2 ( 0,1,2,)
由此,满足幅值条件:
i j N z N p 180 (1 2 )
i 1 j 1
m
n
[例]: 已知系统开环零极点的分布如图示,判断z 2 和p2 之间的实轴是否存在根轨迹?
p4
p3
例题 4-1 已知开环系统的传递函数为:
K k (1s 1) Wk ( s) s(T1s 1)(T2 s 1)
求s=s0 时的放大系数K g 0。
解:改写传递函数为 K g ( s z1 ) K k 1 ( s 1 1 ) Wk ( s) T1T2 s( s 1 T1 )(s 1 T2 ) s( s p1 )(s p2 ) K k 1 K k p1 p2 Kg —— 根轨迹放大系数 T1T2 z1 K g z1 Kk —— 开环放大系数 p1 p2 可将系统的三个极点和一个有限零点画在复平面上如图:
1) 在根轨迹图中,“ ”表示开环极点,“ ”表示开环有限 值零
点。粗线表示根轨迹,箭头表示某一参数增加的方向。“ ” 表
示根轨迹上的点。
2)在绘制根轨迹时,令S平面横轴和纵轴比例尺相同。
g 3)绘制根轨迹的依据是幅角条件。
k
4)利用幅值条件计算
的值。
线性系统的根轨迹法实验报告

线性系统的根轨迹法实验报告实验二线性系统的根轨迹法一,实验目的1,掌握matlab绘制根轨迹的方法。
2,观察k值变化对系统稳定性的影响。
3,掌握系统临界稳定情况下k值得求取。
4,了解增设零点对系统稳定的影响以及改善系统稳定性的方法。
二,实验原理根轨迹的概念:所谓根轨迹就是当开环系统某一参数从零变到无穷大时,闭环系统特征方程式的根在s平面上变化的轨迹。
根轨迹与系统性能:有了根轨迹就可以分析系统的各种性能了,稳定性的判定,当开环增益从零变到无穷大时,根轨迹不会越过虚轴进入s平面的右半平面,此时K的范围为系统稳定的范围,根轨迹与虚轴的交点处的K值,为系统的临界开环增益,开根轨迹进入s平面的右半平面时所对应的K值为系统不稳定的情况。
三,实验内容A、设单位负反馈系统的开环传递函数为G(s)=K/(s*(s+1)(s+5)) (1) 绘制系统的根轨迹,并将手工绘制结果与实验绘制结果比较; (2) 从实验结果上观察系统稳定的K 值范围;(3) 用simulink 环境观察系统临界稳定时的单位阶跃响应分析:绘制根轨迹的matlab文本为clfnum=1;den=conv([1 1 0],[1 5]); rlocus(num,den) %绘制系统根轨迹1,得到如图的根轨迹图:2,用鼠标点击根轨迹与虚轴处的交点可得到临界稳定的开环增益K=30,所以系统稳定的K值范围为0―30。
3,在simulink环境下按下图连接电路:取增益为30的时候在示波器下观察单位节约响应,输出波形为:由图可以看出单位阶跃响应的输出为等幅的震荡输出,所以此时系统为临界稳定状态。
当改变开环增益为50和20时观察示波器,得到输出波形分别为:由图可知当增益K为50时输出为不稳定的震荡输出,此时系统不稳定,当增益K为20时输出的波形震荡越来越缓慢,最后趋于稳定,所以此时的系统是稳定的。
B,设单位反馈控制系统的开环传递函数为G(S)=K(s+3)/s(s+1)(s+2)(1) 仿照上题绘制系统的根轨迹,并判断系统的稳定性; 参照第一题得到matlab命令文本为:clfnum=1;den=conv([1 1 0],[1 2]); rlocus(num,den) %绘制系统根轨迹得到如图的根轨迹图:1,由图可知根轨迹没有进入s平面右半平面,所以系统在K=0到K=?都是稳定的。
根轨迹法(自动控制原理)

❖ 线性时不变系统的动态性能主要取决于闭环系统 特征方程的根(闭环极点),所以控制系统的动 态设计,关键就是合理地配置闭环极点。调整开 环增益是改变闭环极点的常用办法。
❖ 1948年伊凡思(W.R.Evans)提出了根轨迹法,它 不直接求解特征方程,而用图解法来确定系统的闭 环特征根。
所谓根轨迹,就是系统的某个参数连续变化时, 闭环特征根在复平面上画出的轨迹。如果这个参 数是开环增益,在根轨迹上就可以根据已知的开 环增益找到相应的闭环特征根;也可以根据期望 的闭环特征根确定开环增益。
闭环特征方程为:
1G (s)H (s)0
➢ 因为根轨迹上的每一点s都是闭环特征方程的根,所以根轨 迹上的每一点都应满足:
G(s)H(s)1
这就是根轨迹的基本条件。
❖ 满足根轨迹上点的基本条件,又可分别表示为,
幅值条件:
G(s)H(s) 1
相角条件: G ( s ) H ( s ) ( 2 k 1 ) 18 k 0 , 0 1 ,2 ,
显然,位于实轴上的两个相邻的开环极点之间一定有分离 点,因为任何一条根轨迹不可能开始于一个开环极点终止 于另一个开环极点。同理,位于实轴上的两个相邻的开环 零点之间也一定有分离点。
规则6:根轨迹的分离点
❖ 当从K零变到无穷大时,根轨迹可能出现先会合后分离, 这样的点称分离点。分离点对应重闭环极点。
第五章根轨迹分析法修改版

➢根轨迹法是一种分析线性控制系统的图解方法,具有直观和 简便的优点,并且是一种通用方法,可以绘制任意线性多项 式关于任何参数的根轨迹,这样不需要用解析法求特征方程 的根也能够在根轨迹图上分析改变系统的参数对其动态性能 的影响。
5.3 绘制根轨迹的一般方法
制作-罗家祥 审校-胥布工
例5-3 考虑例5-2中的开环传递函数
j j4
GL(s)s(s3K)g(s4)
j3 j2
NL(s)1
180 60
j
D L ( s ) s ( s 3 )s (4 ) s 3 7 s 2 1 s2 4
3 7 3
60 0 j
Hale Waihona Puke dd L D (s) sK gdd L N (s) s3 s2 1s 41 2 0
j
1 2 3 180
z1 0
2 1 z3
2 1
p2
规则5 实轴上的根轨迹
实轴上的根轨迹在奇数个零点和极点的左侧。
规则6 根轨迹的渐近线 Kg→∞时, 有n-m条根轨迹分支沿着与正实轴夾角, 截距为的一组渐近线趋于无穷远处。
m i nl ( n m ) 1 8 30 k 6 , k 0 0 , 1 , 2 , (-5 14)
第五章 根轨迹分析法
制作-罗家祥 审校-胥布工
5.1 引言 5.2 根轨迹的基本概念 5.3 绘制根轨迹的一般方法 5.4 根轨迹法的扩展应用 5.5 开环零、极点对系统根轨迹的影响 5.6 利用MATLAB分析控制系统的根轨迹 5.7 小结
基于MATLAB的根轨迹仿真实验设计
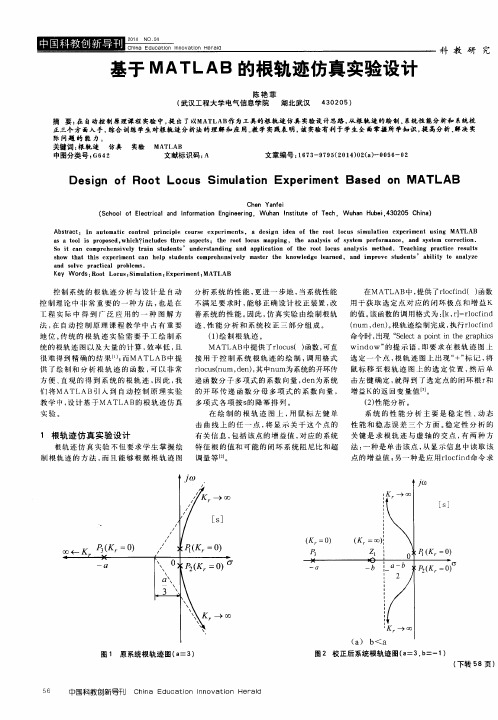
Ab s t r a c t : I n a u t o ma t i c c o n t r o l p r i n c i p l e c o u r s e e x p e r i me n t s, a d e s i g n i d e a o f t h e r o o t l o c us s i mu l a t i o n e x p e r i me nt u s i n g MA T LA B
控制理论中非 常重要的 一种方法 , 也是 在 不 满 足 要 求 时 , 能够正确设计校正装置, 改 用 于 获 取 选 定 点 对 应 的 闭环 极 点 和 增 益 K 工 程 实 际 中 得 到 广 泛 应 用 的 一 种 图解 方 善 系 统 的 性 能 。 因此 , 仿 真 实 验 由 绘制 根 轨
a s a t o o l i S p r o p o s e d, wh i c h ?i n c l u d e s t hr e e a s p e c t s :t h e r o o t l o c u s ma p p i n g, t h e a n a l y s i s o f s y s t e m p e r f o r ma n c e, a n d s y s t e m c o r r e c t i o n.
第四章控制系统根轨迹分析法

主要内容 ➢ 闭环极点与根轨迹的概念 ➢ 根轨迹的绘制规则 ➢ 应用根轨迹图定性分析系统性能指标
重点掌握 ➢ 根轨迹的绘制方法 ➢ Matlab Function: rlocus; rlocfind; sgrid
4.1 根轨迹的概念
一.根轨迹法是1948年伊凡思(Evans)提出的,该法是在
或 Re(1 G( j)H ( j)) 0; IM(1 G( j)H ( j)) 0
根轨迹与虚轴的交点:由s = j 代入闭环特征方程
可得,D(j ) = 0,由方程可得交点的值。
例
+ -
-4
k' s( s 2 )( s 4 )
j
-2
0
根轨迹的分离点:
N (s) 1; D(s) s(s 2)(s 4) N ' (s) 0; D'(s) 3s2 12s 8 N(s)D'(s) N '(s)D(s) 0
已知控制系统开环传函的极、零点分布的基础上,研究某一个 或某些系统参数的变化对控制系统闭环传函极点分布影响的一 种图解法。
二.根轨迹 是指当系统某个参数(比如开环增益k)由零到
无穷大变化时,闭环特征根在[s]平面上移动的轨迹。
举例:
开环传函:G0 s
k
ss 1
K为开环增益(因为标准型)
rs
k
Cs 有两个开环极点 无开环零点
i 1
j 1
4.1 根轨迹的概念
模条件与角条件的作用:
1、角条件与k无关,即s平面上所有满足角条件的 点都属于根轨迹。(所以绘制根轨迹只要依据角条 件就足够了)。
2、模条件主要用来确定根轨迹上各点对应的根轨
第4章 根轨迹
m
(s p
j 1
n
1
j
)
因s为复变量,根轨迹方程又可分解为幅值方程和相 角方程。 幅值方程为
K r (s zi )
i 1 m
(s p
j 1
n
1 或
(s z )
i
m
j
)
(s p
j 1
i 1 n
j
)
1 Kr
相角方程为
(s z ) (s p ) (2k 1)
设p3的出射角为θ3,如图所示。
假设s1为根轨迹上的一点,则s1应 满足相角方程
(s
i 1
1
1
z i ) ( s1 p j ) (2k 1)
j 1
4
由此可推得出射角的一般表达式
l ( pl zi ) ( pl p j ) i j
例4-6 已知系统的开环传递函数为
K r (s 1.5)(s 2 4s 5) G( s) H ( s) s(s 2.5)(s 2 s 1.5)
试绘制系统的根轨迹图。
18
7. 根轨迹与虚轴的交点
根轨迹与虚轴的交点是系统稳定与不稳定的分界点,常 常需要求得这一交点和相应的Kr值。 设与虚轴相交的闭环极点为s=jω,代入闭环特征方程得:
根为两个复数根,系统呈欠阻尼 状态,即输出呈衰减振荡形式。 特征根的实部σ为衰减系数,虚 部ω为振荡频率。
4
4.1.2 根轨迹方程
设系统的结构如图所示。 系统的闭环传递函数为
C ( s) G(s) R( s ) 1 G ( s ) H ( s )
开环传递函数的一般表达式为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用MATLAB进行根轨迹分析
根轨迹分析是一种用于研究系统稳定性和动态特性的方法,通过研究
系统的传递函数来绘制系统极点随参数变化的轨迹。
MATLAB提供了强大
的工具和函数来进行根轨迹分析。
根轨迹是由系统的极点随参数变化所形成的轨迹,它可以反映系统的
稳定性、阻尼比、上升时间、超调量等动态性能指标。
根轨迹的绘制通常
包括以下步骤:
1.定义系统传递函数:首先,需要根据具体的控制系统问题定义系统
的传递函数。
传递函数是描述输入与输出间关系的数学模型,通常用分子
多项式和分母多项式的比值来表示。
2. 极点位置确定:根据系统传递函数的分母多项式,可以求解系统
的极点位置。
MATLAB提供了roots函数来计算多项式的根。
3. 绘制根轨迹:通过参数变化,将系统的极点位置代入传递函数的
分子多项式中,可以计算得出系统的零点。
然后,使用MATLAB的plot函
数将所有极点和零点绘制在复平面上。
4.判断稳定性:通过观察根轨迹的形状,可以判断系统的稳定性。
如
果所有极点都位于左半平面,系统是稳定的。
如果存在极点位于右半平面,系统是不稳定的。
5.分析动态特性:根轨迹的形状可以提供许多关于系统动态特性的信息。
例如,阻尼比可以通过根轨迹上极点到原点的距离和纵坐标之比来估计;超调量可以通过根轨迹的形状和最大振幅来估计。
MATLAB提供了许多用于根轨迹分析的函数和工具箱,包括rlocus函数、nyquist函数和bode函数等。
这些函数可以方便地绘制根轨迹、Nyquist图和Bode图,从而帮助工程师分析系统稳定性以及设计和调整控制器。
根轨迹分析在控制系统设计和调优中具有重要作用。
通过根轨迹的绘制和分析,工程师可以深入了解控制系统的动态特性,并根据需要调整系统参数来达到设计要求。
同时,根轨迹分析也是控制系统教学和研究中常用的方法和工具。
总之,MATLAB是进行根轨迹分析的强大工具,通过绘制根轨迹和分析根轨迹的形状和特性,可以帮助工程师深入了解控制系统的稳定性和动态特性,从而有效地设计和调整控制器。