边角网平差中的坐标初值
课程设计--边角三角网平差程序设计

测量平差程序设计课程设计任务书专业班级:____ __ __________ 指导教师:____ _____________小组成员:目录设计题目 (3)设计资料: (3)一、课程设计的目的 (4)二、课程设计的任务和内容 (4)三、课程设计阶段 (4)四、组织方式进度安排 (5)五、考核与成绩评定 (6)六、参考文献: (6)七、实习报告: (5)设计题目边角三角网平差程序设计设计资料:一、课程设计的目的学生在学习完误差理论与测量平差基础、测量平差程序设计基础等课程的基础上,设计一个完整的测量数据处理程序,培养学生综合应用量数据处理与计算机应用能力,培养学生主动学习,创新设计能力。
二、课程设计的任务和内容1.课程设计任务:在两周的时间内应用者Matlab程序设计语言编制一个完整的边角网严密平差程序,要求有简易的界面,数据输入采用文本输入,采用间接平差模型完成平差的基本计算,能够画出控制网图,输出基本的计算结果,并根据设计过程完成设计报告。
2.程序设计主要内容包括:1.系统功能设计2.界面设计3.流程设计4.代码书写5.程序调试三、课程设计阶段1.准备阶段研究设计任务书,分析设计题目,熟悉原始数据,明确设计内容和要求;制定课程设计计划和进度。
2.熟悉算法模型阅读误差理论与测量平差基础教材,掌握平面控制网数据处理的数学模型,这里主要是指方向观测量、角度观测量、边长观测量的观测方程和误差方程的构成,研究平面观测数据的组织方法,设计Matlab算法,实现计算的自动表达。
3.功能设计阶段设计程序要实现的功能平差程序的基本功能包括数据的输入,平差计算,精度评定、成果输出等;4.流程和界面设计阶段1.根据平差计算的过程和程序功能,画出流程图,设计简易界面实现数据的输入和平差计算和成果输出。
在此基础上,根据功能要求,设计简便的界面。
5.代码书写和调试阶段按照计算流程图和界面设计,根据方向观测值,边长观测值的误差方程的组成,设计Matlab算法,实现误差方程的自动构成,分阶段书写代码,调试实现各个阶段的功能。
边角网坐标平差算例

§9.8 边角网坐标平差算例例9 今有一边角网如图9-11所示。
网中A 、B 、C 、D 、E 是已知点,起算数据见(表9-12),1P 、2P 是待定点。
同精度观测了九个角度921,,,L L L (见表9-13),测角中误差为5.2''±;测量了五个边长141110,,,L L L ,其观测结果及中误差见表9-13。
试按间接点1P 按 013.493301=x m 702.651301=y m283.468402=x m 948.799202=y m2、由已知点坐标和待定点近似坐标计算待定边的坐标方位角改正数方程系数(见表9-14的6~9列);计算待定边的边长改正数方程的系数(见表9-14的10~13列)。
需要指出,坐标方位角改正数方程的系数的单位是秒/厘米,而边长改正数的系数无单位。
3、计算观测角误差方程的系数和常数项,其结果见表9-15的1~9行。
写出观测边误差方程的系数和常数项,其结果见表9-15的第10~14行。
表中,每一行表示一个误差方程;s 为每个误差方程的和检核数。
设取±2.5″为单位权中误差,则测角的权为22)(i i m P ββμ=令 22i m βμ=,则1)5.2()5.2(2222===ii i m m P βββ(无单位) 观测边的权为 2222)(ii Li mm m P iβμ==(秒2/cm 2)表9-14表9-15表9-163 / 64 / 6各观测值的权写在表9-15的p 列中。
v 为角度及边长的改正数,是在解出坐标改正数后计算的。
表9-15中,角度误差方程常数项的单位为秒,边误差方程常数项的单位为cm ,按误差方程求得观测角和观测边的改正数的单位也分别为秒和cm 。
4、法方程的组成和解算。
由表9-15取得误差方程的系数、常数项、和检核数和权组成法方程的系数、常数项、检核数,其结果和法方程的解算均见表9-16。
全站仪测量闭合导线如何平差计算出各点坐标

如果你想学习导线(闭合、符合、支导线),我可以传份学习资料给你,如果要严密平差建议用清华山维测量平差软件如果简单平差可以先推算方位角闭合差,然后将闭合差平均分配到每站测的角度上进行角度平差。
然后用平差后的角度推算坐标闭合差,得到的x和y的闭合差平均分配到每一站的坐标上即可,求得导线绝对闭合差,在除以导线全长得到导线全长相对闭合差导线平差主要是看方向中误差和导线全长闭合差及导线全长相对闭合差工程测量闭合导线差怎么计算的???闭合导线平差手算简单来讲分两步:1.先计算出导线闭合环内角和,它与理论值(n-2)x180相减产生的闭合差平均分配到各个转角。
使修正后的内角和等于理论值。
2.根据已知坐标方位角(已知两点坐标可求得坐标方位角)与修正后的各个转角值求出导线边坐标方位角。
再通过方位角、导线边的长度计算出各个导线边产生的坐标增量。
算到起算点后,X、Y 增量和的理论值均应为0。
但因观测误差,坐标增量和往往不等于0。
将偏差值平均分配到各个点位上,以消除偏差。
最后,用起算坐标依次加上修正后的坐标增量,就可以得到平差后各点的坐标值了。
从一个已知点出发,在连续测量多个点位后再到原出发点,这就叫导线的闭合,因为误差的存在,在闭合时有可能产生误差,这时你需要将误差以每根导线长度为权重进行平差。
看到百笑狂生的回答了,忍不住想说几句,这个什么“原位往复闭合”、“开路测量闭合”等等,你是从哪儿学来的概念?反正在测量这个专业里是没有这个概念的,楼主所说的导线测量,是建立平面控制网的一种最常见的测量方法,下面我简单介绍一下:一、导线进行测量共有三种方法:1、从一个已知点出发,依次对各个目标点进行测量,这种测量方式,因为累积误差的原因,在精度要求较高的场合一般不采用,也谈不上什么闭合不闭合的问题;2、从一个已知点出发,依次对各个目标点进行测量后,再回到这个已知点,也就是说,将已知点做为测量的最后一个点也进行测量。
如果没有误差出现,那么最后一个点的测量结果应与已知点相同,这就叫导线的闭合。
测边测角三角网的平差
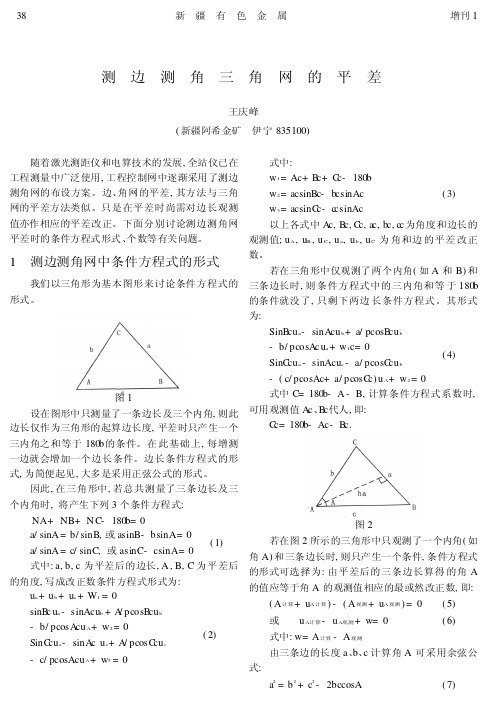
测边测角三角网的平差王庆峰(新疆阿希金矿伊宁835100)随着激光测距仪和电算技术的发展,全站仪已在工程测量中广泛使用,工程控制网中逐渐采用了测边测角网的布设方案。
边、角网的平差,其方法与三角网的平差方法类似。
只是在平差时尚需对边长观测值亦作相应的平差改正。
下面分别讨论测边测角网平差时的条件方程式形式、个数等有关问题。
1测边测角网中条件方程式的形式我们以三角形为基本图形来讨论条件方程式的形式。
图1设在图形中只测量了一条边长及三个内角,则此边长仅作为三角形的起算边长度,平差时只产生一个三内角之和等于180b的条件。
在此基础上,每增测一边就会增加一个边长条件。
边长条件方程式的形式,为简便起见,大多是采用正弦公式的形式。
因此,在三角形中,若总共测量了三条边长及三个内角时,将产生下列3个条件方程式:NA+NB+N C-180b=0a/sinA=b/sinB,或asinB-bsinA=0a/sinA=c/sinC,或asinC-csinA=0(1)式中:a,b,c为平差后的边长,A,B,C为平差后的角度,写成改正数条件方程式形式为:u a+u b+u c+W1=0sinB c u a-sinAcu b+A/pcosB cu b-b/pcosA cu A+w2=0 S++3=(2)式中:w1=Ac+B c+C c-180bw2=acsinBc-b csinAcw3=acsinC c-c csinAc(3)以上各式中A c,B c,C c,a c,b c,c c为角度和边长的观测值;u A,u B,u C,u a,u b,u C为角和边的平差改正数。
若在三角形中仅观测了两个内角(如A和B)和三条边长时,则条件方程式中的三内角和等于180b的条件就没了,只剩下两边长条件方程式。
其形式为:SinB cu a-sinA cu b+a/pcosB cu b-b/pcosA c u a+w1c=0SinC cu a-sinAcu c-a/pcosC cu b-(c/pcosAc+a/pcosC c)u A+w2=0(4)式中C=180b-A-B,计算条件方程式系数时,可用观测值A c、B c代人,即:C c=180b-Ac-Bc.图2若在图2所示的三角形中只观测了一个内角(如角A)和三条边长时,则只产生一个条件,条件方程式的形式可选择为:由平差后的三条边长算得的角A的值应等于角A的观测值相应的最或然改正数,即:(A计算+u A计算)-(A观测+u A观测)=0(5)或u A计算-u A观测+w=0(6)式中:w=A计算-A观测由三条边的长度、、计算角可采用余弦公式=+()38新疆有色金属增刊1inC cu a-sinA c u c A/pcosC cu c -c/pcosAcu A w0a b c A:a2b2c2-2bccosA7即:A 计算=cos-1b 2+c 2-a 2/2bc(8)为了求得u A 计算,微分(7)式得:2ada=2bdb+2cdc-2ccosAdb-2bcosAdc+2bcsinA dA d/p d 式中的d 为微分符号所以dAd/p d=ac/b cc csinA c da-(b cc ccosAc)/(b cc csinAc)db-c c-bcosA c/b cc c sinAcdc(9)因为a/bcsinA c=1/h a (h a 为a 边上的高)b-ccosAc/bcsinAc=acosC c/bcsinA c=cosCc/h a c-bcosAc/bcsinAc=acosB c/bcsinAc=cosB c/h a(10)用改正数代替式(9)中的微分元素,并将式(10)代入,得u A 计算=p d/h A u A -p dcosC c/h A u b-p dcosB c/h A u c(11)因此,条件方程式(11)的最后公式为:P d/h 2u a -p dcosC c/h A u b -p dcosB c/h a u C-u A 观测+w=0(12)式中角B c 和角C c 可按正弦公式求得,即SinB c=sinA c/a cb c SinCc=sinA c/a cc c2测边测角三角网中条件的个数测边测角自由三角网中,条件方程式的总数可按下式确定:r=N+S-2n+3式中:n 为网中三角点的个数;N 为观测角度的个数;S为观测边长的条数。
测角网4个必要起算数据
测绘工程系
必要观测与多余观测
二、三角网(测角网、测边网、边角网)
3、边角网 3个必要起算数据:1个点的纵、横坐标,1条边的已知坐 标方位角 C S4 无已知点 假定必要起算数据:1个点的纵 、横坐标,1条边的已知坐标方 位角,无法确定大小,必须已知 A 1边,边长无误差,不参与平差 多余观测数r=n-2P+3
误差理论与测量平差
测绘工程系
必要观测与多余观测
一、水准网
1、水准网
水准网中,要确定各点的高程,需要一个高程基准。
B h1 h4 D 必要观测数=待定点个数 h5 A
有已知点 h3
h1
h2
即:t=P
B
C
无已知点
A
h6 h5 D h4
h2 h3
假定一个点高程已知
必要观测数=待定点个数-1
即t=p-1
C 误差理论与测量平差
思考:可否假定2个点高程已知?
测绘工程系
必要观测与多余观测
二、三角网(测角网、测边网、边角网)
1、测角网 4个必要起算数据: 1个点的纵、横坐标,1条边的已知坐标 方位角,1条已知边长
C
有两个及两个以上已知点 必要观测数=待定点个数P 的2倍,即t=2P 多余观测数r=n-2P
A
L3 L6
L5
误差理论与测量平差 测绘工程系
S1
L3 L6
L5
S3 B
D
L1
0 L2 L4
S2
必要观测数=待定点个数的2倍-4+1,即t=2P-3
必要观测与多余观测
三、单一附和导线
3个必要起算数据:1个点的纵、横坐标,1条边的已知坐 标方位角
如何进行三角网平差与坐标转换

如何进行三角网平差与坐标转换在测绘和地理信息系统领域,三角网平差和坐标转换是非常重要的技术。
三角网平差是指通过测量角度和距离来建立一个几何模型,以确定一个区域内地物的坐标。
而坐标转换是指将一个坐标系统中的坐标转换到另一个坐标系统中。
一、三角网平差的基本原理三角网平差是基于三角形的观测原理进行的。
在进行三角网平差时,首先需要通过测量来获取一系列的角度和距离数据。
这些数据可以通过全站仪、电子测距仪等仪器来获取。
获取到角度和距离数据之后,需要进行观测值的处理和计算。
这包括对角度的调整、距离的纠正以及角度和距离的配平。
通过这些处理,可以得到一系列完整的观测值。
接下来,在建立三角网之前,需要选定一些控制点。
这些控制点通常是已知的点,它们的坐标是已知的。
通过观测计算,可以得到这些控制点的观测值。
然后,利用这些观测值和已知的坐标,可以进行三角网的平差计算。
三角网平差的目标是要通过这些观测值,找到一个最优的解来确定地球上每个点的坐标。
这个最优解可以使得观测值和计算的结果之间的残差最小。
通过最小二乘法等数学方法,可以进行这个平差过程。
二、坐标转换的基本原理坐标转换是将一个坐标系中的坐标转换到另一个坐标系中。
在测绘和地理信息系统中,常见的坐标转换包括大地坐标系与平面坐标系之间的转换,以及不同投影坐标系之间的转换。
大地坐标系与平面坐标系之间的转换是通过大地测量学的理论和方法进行的。
在这个转换过程中,需要考虑到地球的椭球形状和大地测量学的参数。
通过利用大地测量学中的数学模型,可以将一个大地坐标系的坐标转换到平面坐标系中。
不同投影坐标系之间的转换通常是通过数学方法进行的。
不同的投影坐标系有不同的参数和公式。
通过这些公式和参数,可以进行坐标的转换。
坐标转换可以利用已知的控制点来进行。
通过观测和测量,可以得到这些控制点在不同坐标系中的坐标。
然后,通过数学方法和逆向推算,可以得到一个坐标转换的模型。
这个模型可以将其他点的坐标进行转换。
平差重点知识点(word文档物超所值)

2.8.1 边角网按条件平差(1) 边角网中的条件边角网的建网方法有四种,即在测角网的基础上加测部分边;在测边网的基础上加测部分角;观测部分边和部分角;观测全部边长和角度。
由于边角网既测边长又测角度,因此它具有三角网条件,测边网条件及由边、角两类观测量共同组成的边角条件,具体有以下几种:a. 独立三角网条件用角度组成的三角网图形、圆周闭合和极三种条件;b.独立测边网条件用边长组成的测边网的图形条件;c.边、角条件由观测边长和观测角度共同组成的正弦条件或余弦条件;d. 附合网条件它包括测角网或测边网中的坐标方位角(固定角)、坐标及基线(固定边)(测边网除外)三种条件。
在以上条件中,a、b、d三类条件分别在测角网、测边网及导线网中做了讨论,现讨论C种条件式的组成。
①正弦条件方程式的组成正弦条件是指平差图形中观测角和观测边的平差值应满足正弦定理。
在图2.8-1中,测角网中加测了边长Dcd。
则其正弦条件为:其线性形式为:(2.8-4)式中:很显然,边角网中正弦条件同三角网中基线条件式是相似的,所不同的是在基线条件式的基础上,增加了边长改正数这一项,因此边角网中正弦条件式是三角网中基线条件式的扩展。
在图2.8-1中,如果边长ab也是观测边,那么在(2.8-4)式中还要加一项VDab,其条件方式程形式为:图2.8-1 边角条件基本图形(2.8-5)作为特例,当在一个边角网三角形中(见图2.8-1),显然有两个正弦条件式,其形式为:(2.8-6)式中:式(2.8-6)亦可写成下列形式:(2.8-7)式中:W1=D1sinβ2-D2sinβ1W2=D2sinβ3-D3sinβ2在特殊情况下,如果在测三条边及两个角的三角形中,此时显然有两个正弦条件,其中一个与式(2.8-6)或(2.8-7)式中第一式相同,而第二个条件式则不同,设β3=180°-β1-β2,其条件方程式形式为:(2.8-8)式中:或表达为:(2.8-9)式中:W=D2sin(β1+β2)-D3sinβ2。
三角网坐标平差报告[精华]
![三角网坐标平差报告[精华]](https://img.taocdn.com/s3/m/ba628fd08ad63186bceb19e8b8f67c1cfad6eeec.png)
控制网平差报告
[控制网概况]
1、本成果为按[平面]网处理的平差成果
计算软件:南方平差易2002
网名计算日期:日期: 2011-12-17
观测人罗贤军
记录人:罗贤军
计算者:罗贤军
测量单位:东华理工大学
备注:三角网坐标平差
2、平面控制网等级:国家四等,验前单位权中误差1.5(s)
3、控制网数据统计结果
[角度统计结果]控制网中最小角度:0.3847,最大角度:2.2699 3、控制网中最大误差情况
最大点位误差= 0.2196 (m)
最大点间误差= 0.3948 (m)
最大边长比例误差= 33183
平面网验后单位权中误差= 8.44 (s)
闭合差统计报告
几何条件:中点多边形
路径:[A-B-C-P2-P1]
极条件闭合差=-3,限差=4
几何条件:中点多边形
路径:[C-D-A-P1-P2]
极条件闭合差=1,限差=4
几何条件:闭合导线
路径:[B-P1-A]
角度闭合差=2(s),限差=8(s)
几何条件:闭合导线
路径:[D-P2-A]
角度闭合差=-1(s),限差=8(s)
几何条件:闭合导线
路径:[P1-P2-A]
角度闭合差=-0(s),限差=8(s)
几何条件:闭合导线
路径:[C-P1-B]
角度闭合差=-2(s),限差=8(s)
几何条件:闭合导线
路径:[C-P2-P1]
角度闭合差=-2(s),限差=8(s)
几何条件:闭合导线
路径:[C-D-P2]
角度闭合差=4(s),限差=8(s) [方向观测成果表]
[平面点位误差表]
[平面点间误差表]
[控制点成果表]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 1. V T PV 与参数之间的关系示意图 上图只是一个示意图, 它实际上应该是一个多维曲面,维数等于参数的个数。当平差模型 为线性模型时,该多维曲面只有一个极小值,这时平差结果将与初值无关。对于距离、角度或 方向观测值, 平差模型是非线性的,该多维曲面将可能有多个极小值和多个极大值。准确的平 差过程是先确定一组初值,迭代使 V T PV 趋近于上图中最小的极小值。若迭代使 V T PV 趋近 于其它极小值,则平差出错(由初值不当引起)。若迭代使 V T PV 越来越大,则平差发散。 在求边角网中各点平差初值(近似坐标)的方法中,最容易实现的是指定推算路线,用极坐 标、 前方交会或后方交会等方法求出各点初值,早期的平差程序经常采用这种方法,另一种求 近似坐标的方法是根据观测资料,将观测数据拓扑化,由程序自动找出推算平差初值的路线, 这种方法编程较复杂, 难以普及。这两种方法求得的近似坐标具有相当的准确性,在没有多余
0
先定出各点的近似坐标, 按 V T PV = min ,由(1)式组成法方程,即可平差求得各点坐标。 对某测边网,网形如图 2 所示。1(100,100)、2(200,100)、3(100,200)为已知点,另外 的 4、5 为待定点,边长观测值如表 1 所示。 起点 1 2 3 4 2 3 图 2. 某边角网网 表 1. 边长观测值 平差采用两种方案, 方案 1 相当于将坐标初值点位取在网的左下方,方案 2 相当于将坐标 初值点位取在网的上方。平差时边长精度取为 2mm+2PPm。 点号 方案 1 近似坐标初值 平差值 x 149.992 y 149.992 方案 2 近似坐标初值 平差值 x 149.997 199.995 y 149.997 199.995 终点 4 4 4 5 5 5 测得边长 70.7 70.7 70.7 70.7 100.0 100.0
( )
∆ y0 ij
( )
∆x 0 ij
( )
∆y 0 ij
( )
∆x 0 ij
∆y 0 ij −1
(2)
式中的 Vk 指第 k 个方向观测值 α ij 的改正数,i、j 为方向观测值的测站点和目标点, Zi0 为测 站 i 上零方向的方向角未知数(它是线性量,与初值无关), ( x i ,y i ) 为 i 点的坐标,上标 0 表 示初值, ρ 0 为由近似坐标求得的两点间的边长值,括号中的数字表示由 i、j 两点坐标反算方 向角时,由相对位置确定的要不要加 1800 或 3600 。角度是同一测站上的两个方向相减,故角 度的误差方程就是两个(2)式相减, Zi0 被消区,但要不要加 1800 或 3600 的问题仍然存在。 由(2)式,先定出各点的近似坐标,按 V T PV = min ,即可平差求得各点坐标。 由测边网相比,角度或方向观测值在组成误差方程时,近似坐标初值的取值要复杂一些, 因为初值决定的点与点的相对位置要影响要不要加 1800 或 3600 的问题,这相当与图 1 中有多 个极值。 仍以图 2 的网形为例,观测了所有的方向,试算表明,若 4、5 号点的坐标初值的取值与 1、2、3 三个点的相对位置准确,即 4 号点初值落在由 1、2、3 三点组成的方形内部,5 号点 初值在 4 号点的右上方,则平差能收敛到准确值上。若 4、5 号点的坐标初值不能满足以上关 系,则平差时会出现求逆错或收敛到错误结果上。 2.3 边角网 由于全站仪的广泛使用,边角网是常规控制网施测的主要手段。其法方程由(1)和(2)两种 误差方程形成。 仍以图 2 所示的网形为例,计算表明的情况与 2.2 中的结果相同。 三、结束语 本文讨论了边角网平差中待定点坐标初值的几何意义。 对于测边网,待定点的坐标初值可以任取,只要保证任何两点的近似坐标初值不同即可, 但在所观测距离不能唯一决定网形时(如上例中的 5 号点) ,需要预先指定网形。对于观测了 角度或方向的网,近似值初值取值不当时,平差可能会出现求逆错或不收敛。 因此, 对任意边角网,只要待定点的坐标初值与全网各点间的相对关系一致,即点间的象 限关系准确,平差就可收敛到正确结果上,待定点坐标初值的精度与平差结果无关。 在实际工程测量中, 边角网观测前要经过选点埋石, 选点用的草图就可用来确定待定点的 坐标初值, 在由于计算机的普及和发展,草图可以很容易被直观地输入计算机。这种方法可以 避免输入推算路线,也不必复杂的拓扑化编程。
边角网平差中的坐标初值
裘晓维 1 (湖州市城乡规划管理处) 王解先 2 (同济大学)
摘要 本文讨论边角网平差中, 平差初值的取值问题,及其几何意义,通过实例得出了初值不必 很准,只要能反应点与点之间相对位置即可的结论。 一、前言 在一般的工程建设中,总是先建立一个控制网,边角网是其中最常见的形式,如导线网、 三角网、测边网等。在边角网的平差计算时,要先确定网中各点的平差初值(近似坐标),再进 行平差。 平差初值所起的作用是在组成误差方程时,有线性化初值,平差计算是一个迭代至收 敛的过程, 这个过程就是平差初值向最或是值趋近的过程。 所取的初值应该使得平差结果收敛 到最或是值上,若起始近似坐标取得不当,则平差可能发散,或收敛到非最或是值上。
观测的情况下,它们就是平差的最后结果。 本文将讨论边角网平差中,坐标初值需要的准确程度和取法。 二、边角网平差中的近似坐标 2.1 测边网 对于测边网,误差方程可写为:
Vk = ( x i − x j ) 2 + ( y i − y j ) 2 − D ij
= ∆x 0 ij ρ
0
δx i +
∆ y0 ij ρ
2.2 测角网或测方向网 对于由方向观测值组成的网,误差方程可写为:
00 y j − yi 0 −1 Vk = tg − α ij − Zi0 + 180 x j − xi 3600 00 0 = − α ij + 180 2 δx i − 2 δy i − 2 δx j + 2 δy j − Zi 0 + tg 0 ∆x ij ρ0 ρ0 ρ0 ρ0 3600
$ = (x $1 和其它参数,最小二乘平差就是求定一组 X
二乘法中, V T PV = min 是通过
以 V 表示观测量的改正数, P 表示观测量的权矩阵,X = ( x 1
Tቤተ መጻሕፍቲ ባይዱ
$ n ) ,满足 VT PV = min 。在最小 L x
L x n ) 表示待定点坐标
T
∂VT PV = 0 来实现的。若某网平差时 VT PV 与参数 X (各点 ∂X ∂VT PV 坐标和其它有关参数)的关系可用图 1 来示意, 则将有 5 组 X 满足 = 0 ,即将可解出 5 ∂X 种结果,而其中只有 X3 这组解满足 V T PV = min 。对平差初值 X 0 的要求就是要在迭代过程 中, X 0 趋近于 X3。
0
0
δ yi −
∆x 0 ij ρ
0
δx j −
∆y 0 ij ρ
0
δy j + ρ 0 − D ij
(1)
式中的 Vk 指第 k 条边长观测值 D ij 的改正数, i、 j 为该边的两个端点,( x i ,y i ) 为 i 点的坐标, 上标 0 表示初值, ∆x ij 、 ∆y ij 、 ρ 0 为由近似坐标求得的两点间的坐标差和边长值。
x
4 5
0
y
0
x
0
y
0
0.0 -10.0
0.0 -10.0
200.0
300.0
100.0 100.0 0.0 200.0 表 2. 取不同的近似值测边网的平差结果
表 2 的结果表明,按 2 套不同初值的方案平差,求出的 4 号点坐标是一致的,而 5 号点的 结果相对于 2、4、3 三个点的连线对称,仔细分析可以看出,这两种结果都以最小二乘满足表 1 的观测值,就是说,仅有以上观测值不能唯一确定 5 号点的位置。相当于图 1 有两个相等(观 测精度范围内)的 V T PV 极小值。4 号点的平差结果与初值无关,因为观测值能唯一决定其点 位,5 号点的平差结果与初值有关,因为观测值不能唯一决定其点位,若初值点位在 2、4、3 三点连线的上方,则平差结果同方案 2,若初值点位在 2、4、3 三点连线的下方,则平差结果 同方案 1。 坐标初值的取值应使得 ρ 0 ≠ 0 (分母不能为零),即各点的近似坐标初值不能完全相同。