数字PID算法
PID算法
PID算法一、首先介绍一下PID名字的由来:P:Proportion(比例),就是输入偏差乘以一个常数。
I :Integral(积分),就是对输入偏差进行积分运算。
D:Derivative(微分),对输入偏差进行微分运算。
注:输入偏差=读出的被控制对象的值-设定值。
比如说我要把温度控制在26度,但是现在我从温度传感器上读出温度为28度。
则这个26度就是”设定值“,28度就是“读出的被控制对象的值”。
然后来看一下,这三个元素对PID算法的作用,了解一下即可,不懂不用勉强。
P,打个比方,如果现在的输出是1,目标输出是100,那么P的作用是以最快的速度达到100,把P理解为一个系数即可;而I呢?大家学过高数的,0的积分才能是一个常数,I就是使误差为0而起调和作用;D呢?大家都知道微分是求导数,导数代表切线是吧,切线的方向就是最快到至高点的方向。
这样理解,最快获得最优解,那么微分就是加快调节过程的作用了。
二、然后要知道PID算法具体分两种:一种是位置式的,一种是增量式的。
在小车里一般用增量式,为什么呢?位置式PID的输出与过去的所有状态有关,计算时要对e(每一次的控制误差)进行累加,这个计算量非常大,而明显没有必要。
而且小车的PID控制器的输出并不是绝对数值,而是一个△,代表增多少,减多少。
换句话说,通过增量PID 算法,每次输出是PWM要增加多少或者减小多少,而不是PWM的实际值。
所以明白增量式PID就行了。
三、接着讲PID参数的整定,也就是PID公式中,那几个常数系数Kp,Ti,Td等是怎么被确定下来然后带入PID算法中的。
如果要运用PID,则PID参数是必须由自己调出来适合自己的项目的。
通常四旋翼,自平衡车的参数都是由自己一个调节出来的,这是一个繁琐的过程。
本次我们可以不管,关于PID参数怎么确定的,网上有很多经验可以借鉴。
比如那个经典的经验试凑口诀:参数整定找最佳,从小到大顺序查。
先是比例后积分,最后再把微分加。
PID算法的通俗讲解及调节口诀

PID调节口诀1. PID常用口诀: 参数整定找最佳,从小到大顺序查,先是比例后积分,最后再把微分加,曲线振荡很频繁,比例度盘要放大,曲线漂浮绕大湾,比例度盘往小扳,曲线偏离回复慢,积分时间往下降,曲线波动周期长,积分时间再加长,曲线振荡频率快,先把微分降下来,动差大来波动慢,微分时间应加长,理想曲线两个波,前高后低4比1,一看二调多分析,调节质量不会低2.PID控制器参数的工程整定,各种调节系统中P.I.D参数经验数据以下可参照:温度T: P=20~60%,T=180~600s,D=3-180s压力P: P=30~70%,T=24~180s, 液位L: P=20~80%,T=60~300s, 流量L: P=40~100%,T=6~60s。
3.PID控制的原理和特点在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称 PID调节。
PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象﹐或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
比例(P)控制比例控制是一种最简单的控制方式。
其控制器的输出与输入误差信号成比例关系。
当仅有比例控制时系统输出存在稳态误差(Steady-state error)。
积分(I)控制在积分控制中,控制器的输出与输入误差信号的积分成正比关系。
对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制系统是有稳态误差的或简称有差系统(System with Steady-state Error)。
(完整版)数字PID及其算法
数字PID 及其算法主要内容:1、PID 算法的原理及数字实现2、数字PID 调节中的几个实际问题3、几种发展的PID 算法4、PID 参数的整定方法一、概述几个概念:1、程序控制:使被控量按照预先规定的时间函数变化所作 的控制,被控量是时间的函数。
2、顺序控制:是指控制系统根据预先规定的控制要求,按 照各个输入信号的条件,使过程的各个执行机构自动地按预 先规定的顺序动作。
3、PID 控制:调节器的输出是输入的比例、积分、微分的 函数。
4、直接数字控制:根据采样定理,先把被控对象的数学模 型离散化,然后由计算机根据数学模型进行控制。
5、最优控制:是一种使控制过程处在某种最优状态的控制。
6、模糊控制:由于被控对象的不确定性,可采用模糊控制。
二、PID 算法的原理及数字实现PID 调节的实质:根据系统输入的偏差,按照PID 的函数 关系进行运算,其结果用以控制输出。
PID 调节的特点:PID 的函数中各项的物理意义清晰,调节灵活,便于程序化实现。
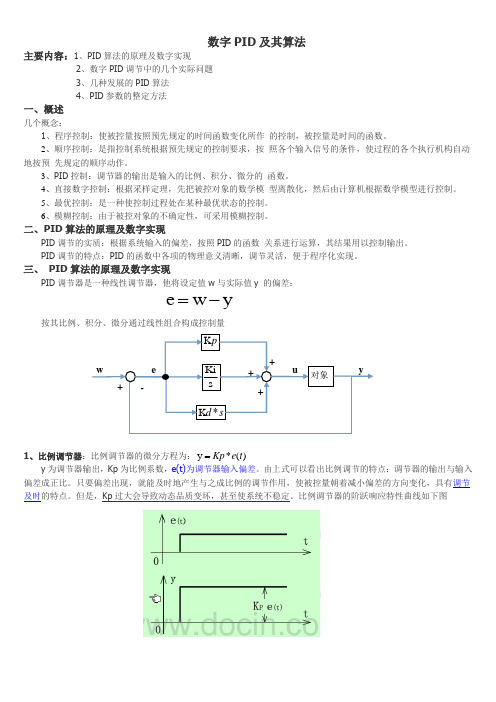
三、 PID 算法的原理及数字实现PID 调节器是一种线性调节器,他将设定值w 与实际值y 的偏差:按其比例、积分、微分通过线性组合构成控制量1、比例调节器:比例调节器的微分方程为:)(*y t e Kp =y 为调节器输出,Kp 为比例系数,e(t)为调节器输入偏差。
由上式可以看出比例调节的特点:调节器的输出与输入偏差成正比。
只要偏差出现,就能及时地产生与之成比例的调节作用,使被控量朝着减小偏差的方向变化,具有调节及时的特点。
但是,Kp 过大会导致动态品质变坏,甚至使系统不稳定。
比例调节器的阶跃响应特性曲线如下图yw e -=sd *K s Ki pK 对象 we + - + + + u y2、积分调节器:积分作用是指调节器的输出与输入偏差的积分成比例的作用,其作用是消除静差。
积分方程为:TI 是积分时间常数,它表示积分速度的大小,TI 越大,积分速度越慢,积分作用越弱。
pid算法原理

pid算法原理PID(Proportional-Integral-Derivative)算法是一种用于控制系统的经典控制算法。
它通过根据当前误差的偏差量,计算出调节器的输出控制信号。
PID算法通过比例、积分和微分三个部分的组合,可以实现对系统的精确控制。
本文将介绍PID算法的原理及其在控制系统中的应用。
一、PID算法原理PID算法的核心思想是根据系统的误差来调节输出控制信号,使得系统的实际输出与期望输出保持一致。
PID算法通过计算比例项、积分项和微分项的加权和,来得到最终的控制输出。
下面将分别介绍这三个部分的作用和计算公式。
1. 比例项(Proportional)比例项是根据误差的大小直接计算输出控制信号的一部分。
它的作用是使系统对于误差的响应更加敏感。
比例项的计算公式为:output = Kp * error其中,Kp为比例增益,error为当前误差。
2. 积分项(Integral)积分项是用来消除系统稳态误差的。
它通过对误差的累积进行控制,使系统能够快速补偿由于比例项无法完全补偿的长期稳态误差。
积分项的计算公式为:output = Ki * ∫(error dt)其中,Ki为积分增益,error为当前误差,∫(error dt)表示误差的累积量。
3. 微分项(Derivative)微分项是用来预测系统未来的变化趋势的。
它通过计算误差的变化率来调节控制输出,使得系统能够更加灵活地响应变化。
微分项的计算公式为:output = Kd * d(error)/dt其中,Kd为微分增益,d(error)/dt表示误差的变化率。
综合上述三部分,PID算法的最终输出可表示为:output = Kp * error + Ki * ∫(error dt) + Kd * d(error)/dt二、PID算法在控制系统中的应用PID算法广泛应用于各种自动控制系统中,例如温度控制器、电机控制器、液位控制器等。
PID算法的主要优点是简单、稳定、可靠,能够适应不同系统的控制需求。
(完整版)PID控制规律及数字PID基本算法

积分 微分
u* (t )
离散化过程相当于脉冲序列调制过程
脉冲信号:
(t
T
)
kT ) k 0
e*(t) e(t) (t kT ) e(kT ) (t kT ) k 0,1,2,K
k 0
k 0
积分环节的离散化处理
PID控制规律及数字PID基本算法
未经许可不得转载 内容仅限参考
知识回顾
系统控制的目标
r(t) e(t)
u(t)
校正环节 Gc (s)
c(t)
执行机构
检测单元
c(t)
被控对象 G(s)
控制目标:系统准确性、稳定性、快速性要求 系统评价:稳态特性、动态特性 稳态特性:稳态误差(误差度),与系统型次及开环增益相关 动态特性:时域指标(超调量、调整时间等);频域指标(稳定裕度、剪切频率、中频宽度、带宽等 经典系统分析方法:时域、频域法、根轨迹等(开环分析闭环) 系统校正:串联校正、反馈校正、复合校正、频率特性校正
2
2.5
3
time(s)
rin,yout
五、小结与数字PID应用中的核心问题
小结 1、理解并掌握PID控制器中比例、积分、微分在调节系统稳态
特性与动态特性中的作用 2、掌握数字PID位置式、增量式的基本算法与特点 3、能够利用基本程序语言实现位置式增量式的程序编写 后续学习内容 1、PID参数的整定问题(周三实验介绍关于PID工程整定方法及
系统校正单元由基本环节构成,包括比例环节、积分环节、惯性环节、一阶微分、 二阶微分等,其中由比例、积分、微分环节构成的PID控制在工业控制中占有非常重 要的地位,了解PID控制规律、掌握PID控制器设计方法是十分必要的。
第七章--数字PID控制及其算法

式中:
KI
KP
T TI
KD
KP
TD T
增量控制算式
整理得:Yn KP KI KD en KP 2KD en 1 KDen 2
d0en d1en 1 d2en 2
式中:
d0
K
P
1
T TI
TD T
d1
KP
1
2TD T
一开始: 比例调节作用→比例输出Y1
随后: 积分作用→在同一方向,在Y1 的根底上输出值不断增大
最后: PI调节器的输出趋于稳定值 KIKPe(t)
第七章 数字PID控制及其算法
③优缺点 优点:克服了比例调节有静差存在的缺点,又防止
了积分调节响应慢的缺点,静态和动态特性 得到了改善。 缺点:当控制对象具有较大的惯性时,无法得到很 好的调节品质。
1
KPen en
1
KP
T TI
en
KP
TD T
en
2en
1
en
2
Y n
1
KP
en
en
1
T TI
en
TD T
en
2en
1
en
2
Yn 1 KPenen 1 Ien Den 2en 1 en 2
式中:e(n)=w-u(n):w—给定值 u(n)—第n次实际输入值
KP—比例系数 D=TD/T—微分系数
在模拟控制系统中调节器的正、反作用是靠改变模拟 调节器中的正、反作用开关的位置来实现的。
第七章 数字PID控制及其算法
7.3.1 正、反作用问题
在数字控制系统中,可用两种方法来实现正、反作用控制: 改变偏差E(K)的公式 正作用:E(K)=M(K)-R(K) 反作用:E(K)=R(K)-M(K) 其中M(K)是测量值,R(K)是给定值 对运算结果进行改变 E(K)计算公式不变,假设需要反作用时,在完成PID运算 之后,先将其结果求补,而后再送到D/A转换器进行转换, 进而输出。
数字pid位置型控制算式

数字pid位置型控制算式
摘要:
1.引言
2.数字pid 位置型控制算式的概念和原理
3.数字pid 位置型控制算式的应用领域
4.数字pid 位置型控制算式的优点和局限性
5.总结
正文:
数字pid 位置型控制算式是一种广泛应用于工业自动化控制领域的算法。
它的原理是根据偏差信号进行比例、积分、微分运算,从而得到控制量,实现对被控对象的位置控制。
数字pid 位置型控制算式的工作原理如下:首先,根据设定值和测量值计算偏差信号;然后,对偏差信号进行比例、积分、微分运算;最后,将运算结果作为控制量,作用于被控对象,使其达到期望的位置。
数字pid 位置型控制算式具有以下优点:1.对偏差信号具有快速的响应能力,能够实现实时控制;2.能够消除系统的静差,提高控制精度;3.具有较强的鲁棒性,能够适应各种复杂的工况。
然而,它也存在一定的局限性,如对于非线性、时变或具有大时延的系统,控制效果可能不理想。
总的来说,数字pid 位置型控制算式是一种实用、有效的控制方法,在我国的工业自动化领域得到了广泛的应用。
pid算法公式

pid算法公式
PID控制算法也称为PID表达式,是一种常用的闭环控制算法。
它在控制系统中的数学模型表示为一个三重积分运算:比例(P)、积分(I)和微分(D)。
它可以调节输出,使其与设定值保持一致,进而实现理想的调节结果,从而改善控制系统的性能。
PID算法可以模拟出人类操作的模式,将参与控制的变量结合起来,因此PID算法在自动控制领域有着重要的地位。
PID算法的公式如下:PID输出= Kp*e(t)+ Ki∫e(t)+ Kdde(t)/dt。
其中:Kp为比例系数,Ki为积分系数,Kd为微分系数;e(t)为反馈误差,t为时间。
Kp*e(t)表示比例控制,比例控制反馈误差大则输出值大,反馈误差小则输出值小;Ki∫e(t),表示积分控制,误差积分增大,输出值越大,积分减小,输出值就越小;Kdde(t)/dt,表示微分控制,反馈误差快速减小时,相应的输出值减小,反馈误差减慢时,输出值加大,使控制系统的收敛增快。
通过调节Kp,Ki和Kd三个系数,可以控制系统的稳定性、精度和响应速度,从而实现更好的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在连续-时间控制系统中,PID控制器应用得非常广泛。
其设计技术成熟,长期以来形成了典型的结构,参数整定方便,结构更改灵活,能满足一般的控制要求。
数字PID控制比连续PID控制更为优越,因为计算机程序的灵活性,很容易克服连续PID控制中存在的问题,经修正而得到更完善的数字PID算法。
本章将详细地讨论数字PID控制器的设计和调试问题。
数字PID控制
数字PID控制器参数选择
连续一时间PID控制系统如图3-1所示。
图中,D(s)为控制器。
在PID控制系统中,D(s)完成PID控制规律,称为PID控制器。
PID控制器是一种线性控制器,用输出量y(t)和给定量r(t)之间的误差的时间函数。
e(t)=r(t)-y(t)
(3-1)的比例,积分,微分的线性组合,构成控制量u(t)称为比例Proportional)积分(Integrating)微分(Differentiation)控制,简称PID控制。
实际应用中,可以根据受控对象的特性和控制的性能要求,灵活地采用不同的控制组合,构成
比例(P)控制器
(3-2)
比例十积分(PI)控制器
(3-3)
比例十积分十微分(PID)控制器
(3-4)
式中 KP——比例放大系数;TI——积分时间; TD——微分时间。
比例控制能迅速反应误差,从而减小稳态误差。
但是,比例控制不能消除稳态误差。
比例放大系数的加大,会引起系统的不稳定。
积分控制的作用是,只要系统有误差存在,积分控制器就不断地积累,输出控制量,以消除误差。
因而,只要有足够的时间,积分控制将能完全消除误差,使系统误差为零,从而消除稳态误差。
积分作用太强会使系统超调加大,甚至使系统出现振荡。
微分控制可以减小超调量,克服振荡,使系统的稳定性提高,同时加快系统的动态响应速度,减小调整时间,从而改善系统的动态性能。
应用PID控制,必须适当地调整比例放大系数KP,积分时间TI和微分时间TD,使整个控制系统得到良好的性能。
在电子数字计算机直接数字控制系统中,PID控制器是通过计算机PID控制算法程序实现的。
计算机直接数字控制系统大多数是采样-数据控制系统。
进入计算机的连续-时间信号,必须经过采样和整量化后,变成数字量,方能进入计算机的存贮器和寄存器,而在数字计算机中的计算和处理,不论是积分还是微分,只能用数值计算去逼近。
在数字计算机中,PID控制规律的实现,也必须用数值逼近的方法。
当采样周期相当短时,用求和代替积分,用差商代替微商,使PID算法离散化,将描述连续-
时间PID算法的微分方程,变为描述离散-时间PID算法的差分方程。
考虑式(3-4),用矩形积分时,有
(3-5)
用差分代替微分
(3-6)
将式(3一5)、(3一6)代入式(3一4),PID算法变为
(3-7)
或
式中 u 0——控制量的基值,即k=0时的控制;
u(k)——第k个采样时刻的控制; KP——比例放大系数; KI——积分放大系数;
KD——微分放大系数;
TS——采样周期。
式(3-7)是数字PID算法的非递推形式,称全量算法。
算法中,为了求和,必须将系统偏差的全部过去值e(j)(j=1,2,3,... ,k)都存储起来。
这种算法得
出控制量的全量输出u(k),是控制量的绝对数值。
在控制系统中,这种控制量确定了执行机构的位置,例如在阀门控制中,这种算法的输出对应了阀门的位置(开度)。
所以,将这种算法称为“位置算法”。
当执行机构需要的不是控制量的绝对值,而是控制量的增量(例如去驱动步进电动机)时,需要用PID的“增量算法”。
由位置算法求出
再求出
两式相减,得出控制量的增量算法
(3-8)
式(3-8)称为增量式PID算法。
对增量式PID算法(3-8)归并后,得
(3-9)
其中(3-9)已看不出是PID的表达式了,也看不出P、I、D作用的直接关系,只表示了各次误差量对控制作用的影响。
从式(3-9)看出,数字增量式PID算法,只要贮存最近的三个误差采样值e (k)、e(k-1)、e(k-2)就足够了。
这就是我们前面涉及的系统,系统中只有一个PID控制器,如图3-13所表示。
计算机串级控制系统的典型结构如下图3-14所示。
系统中有两个PID控制器,其中一个控制器的输出,作为另一个控制器的给定。
图中,控制器PID2称副控制器,内环称副回路;PID1称主控制器,包围PID2的外环称主回路。
主控器的输出控制作为副回路的给定量。
串级控制系统的计算顺序是先主回路(PID1)后副回路(PID2)。
控制方式有两种:异步采样控制和同步采样控制。