滑块分拣机
仓储名词解释
仓储名词解释:仓储:指通过仓库对商品进行储存和保管。
仓储管理:指服务于一切库存商品的经济技术方法与活动。
集货中心:将零星货物集中成批量货物称“集货”主要起集货作用的物流中心。
叫集货中心。
分货中心:分货中心是和集货中心相对应的专门或主要从事分货工作的物流中心。
它的主要功能是将大批量、大包装运进的货物按销售要求进行分装加工形成小的销售批发起点。
再转运出去。
配送中心:指专门从事配送工作的物流中心是最典型、最高形态的物流中心。
物流中心要有存储设施、配货场地有诸如皮带输送机、滑槽之类的传递装置有光电识别机构、识码器、传感装置等货物识别装置。
有叉车之类的装卸设备有棚式、厢式、翼型、后部卷帘式等配送用特种车辆。
加工中心:指以流通加工为主要任务的物流中心。
加工中心除具有加工设备外还应有一定的储运、装卸、包装设备。
转运中心:指以专门承担货物的卡车-卡车、卡车-火车、火车-轮船、卡车-飞机、轮船-火车等不同运输方式的转运任务的物流中心。
可分为卡车转运中心、火车转运中心以及综合转运中心。
配载中心:指为解决长途运输车辆的返程空驶,为中心批量的货品中长途运输而设立的货品集散地。
储调中心:指以储备为主要任务的物流中心即仓库。
物流系统:指在特定的社会经济大环境里由需要位移的物资和包装设备、搬运装卸设备、运输工具、仓储设施、人员和通讯联系等若干相互制约的动态要素所构成的具有特定功能的有机整体。
EDI技术:EDI(电子数据交换)技术是指不同企业之间为了提高经营活动效率。
在标准化的基础上通过建立企业间的数据交换网来实现票据处理、数据加工等事务作业的自动化、省力化、及时化和正确化同时通过有关的销售信息和库存信息的共享来实现经营过程的效率化。
物流网络:指在一定的区域内建立起能够使商品在众多的物流点、线之间有效流动的物流设施。
物流环保化:指在物流过程中抑制物流对环境造成危害的同时。
实现对物流环境的净化使物流资源得到最充分的利用。
仓储作业组织:仓储作业组织就是按照预定的目标将仓库作业人员与仓库储存手段有效地结合起来。
滑块式分拣机在卷烟企业高架库生产过程的应用

滑块式分拣机在卷烟企业高架库生产过程的应用随着科技的不断进步,人们在日常生产和生活中开始大量采用各种机械、电子设备来协助其完成各种工作,滑块式分拣机就是其中之一。
在卷烟企业的高架库生产过程中,滑块式分拣机可以起到很大的作用,帮助企业提高工作效率,降低生产成本,提高生产品质。
本文将从以下几个方面来探讨滑块式分拣机在卷烟企业高架库生产过程的应用。
一、滑块式分拣机的技术原理滑块式分拣机通过先进的电子控制技术,通过电子设备对烟丝进行智能分拣,无需人工干预,整个过程十分的自动化。
在高架库生产过程中,滑块式分拣机主要作用就是对卷烟进行分拣,将卷烟按照规格、烟量、烟种等等因素进行分类。
它通过控制烟丝样品的传输,在传输过程中,通过各路智能传感器和控制器对卷烟的长度、烟丝烟量、炭化程度、烟层厚度、卷烟口径等进行检测和分析,然后根据一定的算法进行分类,将不同规格、不同质量的卷烟分别存储在不同的仓库中,以达到精确、高效的分类。
二、滑块式分拣机的优点1、高精度分类:滑块式分拣机通过各种智能控制器和传感器进行精准检测,实现从毛重到净重、烟丝的炭化度、烟层厚度、卷烟口径等190余项关键技术指标的扫描,在卷烟分类过程中精度高达99.99%以上。
2、高产能和高效率:滑块式分拣机可以实现24小时的连续运转,并可实现高达500条每分钟的烟丝分拣和分类,最大限度地减少了生产线的停机时间,提高了企业的生产效率。
3、可靠性和稳定性:由于其采用先进的技术和高品质的电子元器件,所以它的可靠性和稳定性非常高。
并且它的设计模块化,易于维护和保养。
同时,滑块式分拣机的状态监控系统可以实时提醒设备运行状态和异常信息,从而大大减少了人为因素导致的故障发生。
4、环保节能:滑块式分拣机不仅可以减少人工劳动,同时也可以减少环境污染,由于是全自动化的生产,不仅可以节省人力成本,而且可以节省能源成本。
三、滑块式分拣机在卷烟生产过程中的应用在卷烟企业高架库生产中,滑块式分拣机可以应用于以下几个方面:1、烟丝质量的检测和分类:在卷烟的生产过程中,烟丝质量的好坏和一致性极为重要,滑块式分拣机可以对烟丝进行精确检测和分类,保证卷烟的一致性和品质。
滑块分拣机

滑块式分拣机是一种水平、高速的物流输送设备。
分拣机的承载面由等宽、挤出成型的铝承载板构成,它能载运各种尺寸的物品。
1)基本○(结构滑块式分拣机是一种水平、高速的物流输送设备。
分拣机的承载面由等宽、挤出成型的铝承载板构成,它能载运各种尺寸的物品。
承载板连接着驱动链条,在焊接成的钢制机身内的支撑和导向轮上运行。
塑料滑块嵌在承载板之间。
通常包括以下组件:含张紧的驱动单元;床体;从动辊端;上包皮带输送机;卸包输送机;换向开关架;分拣预备组件;支撑;承载板;自润滑单元(用于链条);底面和侧面的盖板。
控制系统采用工业控制器,并包括以下主要部件:本地控制盒(多个);驱动控制面板(用于控制电机及变频器);驱动端和张紧端的连线盒;换向拨叉机构开关控制盒。
另外,为保证安全与故障处理,分拣机通常还配多种传感器,比如滑块脱落传感器、链条断裂传感器、链条松弛传感器等。
滑块式分拣机通常由板式输送机、滑块、道岔等组成,它根据控制系统的指令,并通过滑块将分拣物品分发到不同的场地。
(2)基本原理滑块式分拣机的供包端有一个上包皮带输送机,用来将物品调整到一个正确的速度,输送到分拣机上。
分拣机的承载板互相平行地排列在垂直于链条的位置之上,相互之间保持很小的间距。
这样就提供了一个平整面,能输送哪些一般被认为不可分拣的、不规则形状的物品。
承载板上装有滑块。
它们是注塑件并能沿着板条间的间隙滑动。
在每一个滑块的下面都装有一个导向轮。
这些导向轮在机体段内的导轨里运动,它控制着滑块的运动方向。
分拣机机体的每个分拣位置上都装有模块化的换向开关。
在分拣位置,滑块被开关导向30°角,使它们垂直于载运机滑动,轻轻地推着物品花巷格口。
使物品转向的滑块数量取决于每个物品实际的长度。
分拣前不需要物品对齐。
双侧分拣机根据相应的输出,需要在分拣机的前端有一个滑块预分单元。
(3)性能参数滑块式分拣机适宜各种纸箱、塑料箱及其他不规则物品的分拣,它不要求物品有一个平整、稳定的底面,这点与其他类别的分拣机有所不同,其各种性能参数如下:基本分拣模块:单/双侧分拣;分拣长度:最大140m;分拣速度:最大132m/min;分拣机的尺寸由被分拣的物品尺寸、分拣机的基本模板和输出的长度决定。
智能快递技术—自动分拣系统
拣取出来,并按一定的方式进行分类、集中的作业
过程。
补充:合理规划与管理分拣 作业,对配送中心作业效率 和降低整个配送中心作业成 本具有事半功倍的效果。
在配送中心搬运成本中,分拣作业 搬运成本约占90%;在劳动密集型 配送中心,与分拣作业直接相关的 人力占50%;分拣作业时间约占整 个配送中心作业时间的30% ~ 40%
自动分拣系统的组成及核心部分
三、滑块式分拣机
滑块式分拣机是一种特殊形式的条板输送机。输送机的表面用金属条板或管子构成,如竹席状, 而在每个条板或管子上有一枚用硬质材料制成的导向滑块,能沿条板作横向滑动。平时滑块停止 在输送机的侧边,滑块的下部有销子与条板下导向杆联结,通过计算机控制,当被分拣的货物到 达指定道口时,控制器使导向滑块有序地自动向输送机的对面一侧滑动,把货物推人分拣道口, 从而商品就被引出主输送机。这种方式是将商品侧向逐渐推出,并不冲击商品,故商品不容易损 伤,它对分拣商品的形状和大小适用范围较广,是目前国外一种最新型的高速分拣机。
自动分拣系统的概念及流程
二、自动分拣系统的特点
1、 能连续、大批量地分拣货物 由于采用大生产中使用的流水线自动作业方式,自动分拣系统不受 气候、时间、人的体力等的限制,可以连续运行,同时由于自动分 拣系统单位时间分拣件数多,因此自动分拣系统的分拣能力是人工 分拣系统可以连续运行100个小时以上,每小时可分拣7000件包装 商品,如用人工则每小时只能分拣150件左右,同时分拣人员也不能 在这种劳动强度下连续工作8小时。
自动分拣系统的概念及流程
课前思考
1.什么是自动分拣系统? 2. 自动分拣系统的工作流程是怎样的?
?
3.自动分拣系统有哪几部分组成? 4.自动分拣系统的“核心”是什么?
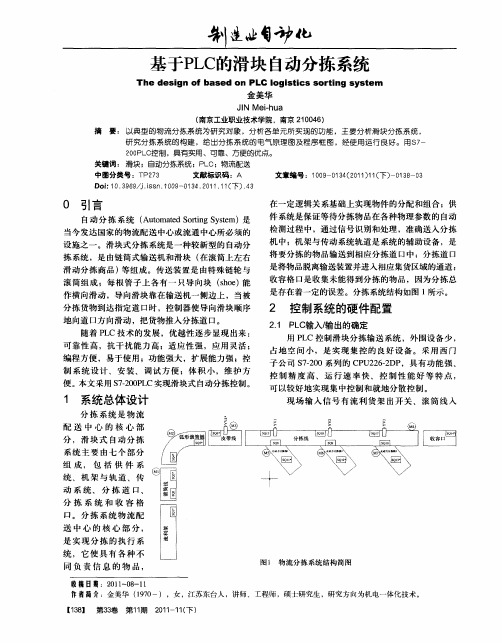
基于PLC的滑块自动分拣系统
【]刘伟香 , 3 邓朝晖. 工程陶瓷磨削表面残 余应力测试【1现 J.
代 制 造 工程 .0 55:9 13 20 ()9 —0 . 【】林 滨 . 程 陶 瓷 超 精 密 磨 削 技 术 研 究 [ . 津 : 津 大 4 工 D】 天 天
学 ,9 8 19 .
[】赵 波. 向超声振动珩 磨系统 及硬 脆材料延性切削特征 7 纵
2 1— 1下 ) [3] 01 1( 19
送 线 启 动 、 停 止 指 示 灯 、分 拣 线 速 度 控 制 信 号 12 / 、皮 带 线 条码 扫 描 器 处 阻 挡器 动 作 、警 灯 、分 拣线 分拣 口 1 23动 力滚筒 电机 控制 等 1 。 // / 6个
22 P C原 理 图 . L
研 究 【 . 海 交 通 大 学 ,9 9 D]上 19 .
【】邓朝晖 , 璧, 8 张 周志雄. 陶瓷 磨削的表 面/ 亚表面损伤 【J Jl
湖南大学学报( 自然 科 学 版 )2 0 ,95: 17 . ,0 2 2()6 —1
【] 吴 雁 . 一 米 复 合 陶 瓷 二 维 超 声 振 动 磨 削脆 一 转 变 机 5 微 纳 塑 理 及 其 表 面 微 观 特 性 研 究 【 ]上 海 交 通 大 学 ,0 6 D. 20 .
待 ,控 制 系统 自动 等 待 ,否 则 将 物 品 送 入 供 建 系 统 、分 拣 系统 、 目的格 口, 同时 反馈 给信 息 系统 。
3 结论
总 之 ,在 基 于 基 于 P C 的滑 块 自动分 拣 系统 L
中 ,分 析 控 制 系 统 结 构 ,确 定 控 制 系统 的硬 件 选 择 ,定 义 P C 的 I L / O端 子 ,说 明 电气 原 理 图 ,流 程 图等 ,经运 行 使 用 效 果 良好 ,用 P C控 制 ,具 L 有经济 、可靠 、方便 的优 点 。
分拣机构的名称与动作原理
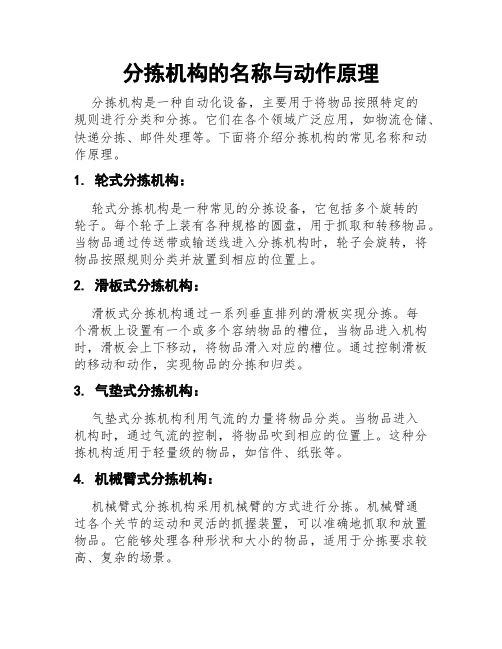
分拣机构的名称与动作原理
分拣机构是一种自动化设备,主要用于将物品按照特定的
规则进行分类和分拣。
它们在各个领域广泛应用,如物流仓储、快递分拣、邮件处理等。
下面将介绍分拣机构的常见名称和动作原理。
1. 轮式分拣机构:
轮式分拣机构是一种常见的分拣设备,它包括多个旋转的
轮子。
每个轮子上装有各种规格的圆盘,用于抓取和转移物品。
当物品通过传送带或输送线进入分拣机构时,轮子会旋转,将物品按照规则分类并放置到相应的位置上。
2. 滑板式分拣机构:
滑板式分拣机构通过一系列垂直排列的滑板实现分拣。
每
个滑板上设置有一个或多个容纳物品的槽位,当物品进入机构时,滑板会上下移动,将物品滑入对应的槽位。
通过控制滑板的移动和动作,实现物品的分拣和归类。
3. 气垫式分拣机构:
气垫式分拣机构利用气流的力量将物品分类。
当物品进入
机构时,通过气流的控制,将物品吹到相应的位置上。
这种分拣机构适用于轻量级的物品,如信件、纸张等。
4. 机械臂式分拣机构:
机械臂式分拣机构采用机械臂的方式进行分拣。
机械臂通
过各个关节的运动和灵活的抓握装置,可以准确地抓取和放置物品。
它能够处理各种形状和大小的物品,适用于分拣要求较高、复杂的场景。
分拣机构的命名通常基于其工作原理和结构特点,以便区分不同的设备。
虽然以上给出了几种常见的分拣机构名称和动作原理,但在实际应用中,也常会出现其他类型的分拣机构,以满足不同的需求。
无论是哪种类型的分拣机构,其目的都是提高工作效率,减少人工操作,实现自动分拣的目标。
滑块分拣机原理

滑块分拣机原理
滑块分拣机是一种自动化分拣设备,它可以将物品按照一定的规则进行分类和分拣。
滑块分拣机的原理是利用滑块的运动来实现物品的分拣。
滑块分拣机由滑块、传动机构、控制系统和分拣装置等组成。
滑块是滑动在导轨上的一个长条形零件,它的运动是由传动机构驱动的。
传动机构包括电机、减速器、链条、齿轮等,它们的作用是将电机的旋转转换成滑块的直线运动。
控制系统是滑块分拣机的大脑,它可以根据不同的分拣任务来控制滑块的运动。
分拣装置是用来接收和分拣物品的部件,它可以根据不同的物品特性来设计不同的分拣方式。
滑块分拣机的工作原理是:当物品进入分拣装置时,控制系统会根据物品的特性来判断它应该被分拣到哪个位置。
然后,控制系统会发出指令,传动机构会将滑块移动到相应的位置,将物品推到相应的分拣口。
当物品被推到分拣口时,分拣装置会将它接收并进行分类,然后将分类好的物品送到相应的位置。
滑块分拣机的优点是:高效、精准、可靠。
它可以快速地完成大量的分拣任务,而且分拣的精度非常高,可以达到毫米级别。
此外,滑块分拣机的结构简单,维护成本低,使用寿命长。
滑块分拣机广泛应用于物流、快递、电子、食品等行业,它可以大
大提高生产效率,降低人工成本,提高产品质量。
随着科技的不断发展,滑块分拣机的应用范围将会越来越广泛,它将成为自动化分拣领域的重要设备之一。
DEMATIC物流设备产品介绍(PPT)

适于:水平运输或倾斜运输,在矿类企业中,可以对矿物进行连续,大批
量输送;在制造工厂中,可以对生产线上的原材料、半成品进行输送;在
配送中心,可以对货物进行输送。
第十四页,共三十五页。
带式输送机
4.2、动力辊子输送机
辊子输送机利用按一定间距架设(jiàshè)在固定支架上的假设干个辊子来输送成件物品的输送机,
3、货架的制造和安装的精度高。
缺点:
1、由于货架的制造和安装精度高,所以建设本钱投入大。 2、堆垛机的作业频繁,维修本钱高。
3、对计算机的依赖性强,一旦(yīdàn)系统出现故障,面临作业瘫痪的风险。
适于:储存高生产量纸箱和货柜。
第八页,共三十五页。
2.3、Multishuttle™货架
Multishuttle™货架是与多层穿梭车配套设计的货架,用于支撑穿梭车
适于:自动化存取重量较轻的料箱、货柜和吸塑盘。
第十二页,共三十五页。
多功能穿梭机
4、输送设备
Dematic输送设备包括带式输送机、动力辊子输送机、链条式输送机、悬挂单轨(dānguǐ)小车、自动导引车〔AGV〕四类。
带式输送机
动力(dònglì)辊子输送机
链式输送机
悬挂(xuánguà)单轨小车
第十三页,共三十五页。
按辊子是否具有驱动装置,可分为无动力式和动力式两类。动力辊子输送机作业中, 驱动装置将动力传给辊子,使其旋转,通过辊子外表与输送物品外表间的摩擦力输送物品 优点: 1、结构简单、运行可靠、维护方便,能够输送单件重量很大的物料。
2、可输送高温(gāowēn)物品、节能。
3、可以实现直线、曲线、水平、倾斜运行,能完成分流、合流目的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
滑块式分拣机是一种水平、高速的物流输送设备。
分拣机的承载面由等宽、挤出成型的铝承载板构成,它能载运各种尺寸的物品。
1)基本○(结构滑块式分拣机是一种水平、高速的物流输送设备。
分拣机的承载面由等宽、挤出成型的铝承载板构成,它能载运各种尺寸的物品。
承载板连接着驱动链条,在焊接成的钢制机身内的支撑和导向轮上运行。
塑料滑块嵌在承载板之间。
通常包括以下组件:含张紧的驱动单元;床体;从动辊端;上包皮带输送机;卸包输送机;换向开关架;分拣预备组件;支撑;承载板;自润滑单元(用于链条);底面和侧面的盖板。
控制系统采用工业控制器,并包括以下主要部件:本地控制盒(多个);驱动控制面板(用于控制电机及变频器);驱动端和张紧端的连线盒;换向拨叉机构开关控制盒。
另外,为保证安全与故障处理,分拣机通常还配多种传感器,比如滑块脱落传感器、链条断裂传感器、链条松弛传感器等。
滑块式分拣机通常由板式输送机、滑块、道岔等组成,它根据控制系统的指令,并通过滑块将分拣物品分发到不同的场地。
(2)基本原理滑块式分拣机的供包端有一个上包皮带输送机,用来将物品调整到一个正确的速度,输送到分拣机上。
分拣机的承载板互相平行地排列在垂直于链条的位置之上,相互之间保持很小的间距。
这样就提供了一个平整面,能输送哪些一般被认为不可分拣的、不规则形状的物品。
承载板上装有滑块。
它们是注塑件并能沿着板条间的间隙滑动。
在每一个滑块的下面都装有一个导向轮。
这些导向轮在机体段内的导轨里运动,它控制着滑块的运动方向。
分拣机机体的每个分拣位置上都装有模块化的换向开关。
在分拣位置,滑块被开关导向30°角,使它们垂直于载运机滑动,轻轻地推着物品花巷格口。
使物品转向的滑块数量取决于每个物品实际的长度。
分拣前不需要物品对齐。
双侧分拣机根据相应的输出,需要在分拣机的前端有一个滑块预分单元。
(3)性能参数滑块式分拣机适宜各种纸箱、塑料箱及其他不规则物品的分拣,它不要求物品有一个平整、稳定的底面,这点与其他类别的分拣机有所不同,其各种性能参数如下:基本分拣模块:单/双侧分拣;分拣长度:最大140m;分拣速度:最大132m/min;分拣机的尺寸由被分拣的物品尺寸、分拣机的基本模板和输出的长度决定。
单侧分拣的机体宽度:856~1356mm,以100mm为单位增加。
双侧分拣的机体宽度:1056~1556mm,以100mm为单位增加。
分拣机的效率由被分拣物品的长和宽、分拣速度、调整类型和其他操作因素决定。
通常不低于6000件/h,属于高处理量的分拣机。
国外相关工业公司分拣机主要性能参数:效率:6000件/h。
操作条件:温度:0~40℃;湿度:最大95%,无冷凝。
设置CP343-1、CP343-IT模块的参数,建立一个以太网,MPI、IP地址:二、网络组态组态完2套系统的硬件模块后,分别进行下载,然后点击Network Configration按钮,打开系统的网络组态窗口NetPro,选中CPU314,如下图:在窗口的左下部分点击鼠标右键,插入一个新的网络链接,并设定链接类型为ISO-on-TCP connection 或TCP connection或UDP connection 或ISO Transport connection,如下图:点击OK后,弹出链接属性窗口,使用该窗口的默认值,并根据该对话框右侧信息进行后面程序的块参数设定:当2套系统之间的链接建立完成后,用鼠标选中图标中的CPU,分别进行下载,这里略去CPU314C-2DP的下载图示:三、程序编程到此为止,系统的硬件组态和网络配置已经完成。
下面进行系统的软件编制,在SIMATIC Manager界面中,分别在CPU314C-2PTP、CPU314C-2DP中插入OB35定时中断程序块和数据块DB1,DB2,并在两个OB35中调用FC5(AG_Send)和FC6(AG_Recv)程序块,如下图:创建DB1、DB2数据块,如下图:2套控制程序已经编制完成,分别下载到CPU当中,将CPU状态切换至运行状态,就可以实现S7-300之间的以太网通讯了。
如下界面说明了将CPU314C-2DP 的DB1中的数据发送到CPU314C-2PTP 的DB2中的监视界面:a.选择Data View,切换到数据监视状态:b.CPU314C-2DP 的DB1中发送出去的数据:c.CPU314C-2PTP 的DB2中接收到的数据1 CP343-1作为共享设备功能介绍1.1 描述在较大或广泛分布的PROFINET系统中,通常有许多IO控制器;如果一个通过CP343-1处理器连接到PROFINET网络上的控制器需要和另外两个IO控制器做数据交换时,则可以通过CP343-1的共享设备功能来实现,参考图1。
图 1 CP343-1共享设备功能为了方便理解,本文介绍了如何实现一个CP343-1作为共享设备同时被两个集成PN接口的控制器访问的功能,包括基本的配置步骤、编程及测试等内容。
使用共享设备功能,需要使用Step7 V5.5和支持共享设备功能的IO控制器和IO设备;对于支持共享设备功能IO控制器和IO设备,请参考如下链接:443839542 CP343-1作为共享设备功能组态2.1 硬件设备实验的硬件设备:1、CPU315-2PN/DP(6ES7 315-2EH14-0AB0 V3.2),两台2、CPU317-2DP(6ES7 317-2AJ10-0AB0 V2.6),一台3、CP343-1 Lean (6GK7 343-1CX10-0EX0 V3.0),一台4、SCALANCE X216交换机,S7-300和PC通过交换机互连起来5、PC机(带以太网卡);TP以太网电缆2.2 软件环境1、Windows XP SP32、STEP7 V5.5 SP2 HF12.3 系统网络以下例子描述了PROFINET共享设备功能,参考图2。
图 2 PROFINET IO系统网络2.4 通信任务本例中所要完成的通信任务定义为:1、将CP343-1组态为共享设备,配置输入、输出数据字节分别为10个字节。
2、CPU317-DP通过CP343-1发送数据MB100~109,其中MB100~103共计4个字节发送到IO控制器1;MB104~109共计6个字节发送到IO控制器2。
3、CPU317-DP通过CP343-1接收数据存放到MB110~119,其中MB110~113接收来自IO控制器1的4个字节;MB114~119接收来自IO控制器2的6个字节。
3 CP343-1作为共享设备功能组态3.1创建新项目在Step7中新项目中创建三个S7-300站,参考图3。
站名称分别为315 PN-1,315 PN-2,CP343。
图 3 创建项目3.1.1 组态CP 343站在STEP7中打开CP 343站对应的硬件组态,配置CPU317-2DP,注意配置CP343-1 Lean时选择版本V3.0,参考图4;设置IP地址和新建网络Ethernet(1) 网络,且设备名为share-IO,参考图5。
图 4 CP 343站的组态图 5 设置IP和新建网络双击“share-IO”打开属性窗口,在属性页“I 设备”中选中如图6中的复选框。
图 6 设置CP343-1 Lean属性点击“新建”按钮,弹出窗口如图7,设置数据传送区。
图7 设置数据传送区按任务要求设置4个数据传送区,参考图8。
图8 设置4个数据传送区设置数据传送区完成后,保存编译。
然后创建共享设备GSD文件,并将其安装到硬件目录中,参考图9、10。
图9 创建GSD文件图10 GSD文件安装成功至此,CP343站配置完毕。
3.1.2 组态315 PN-1站在STEP7中打开315 PN-1站对应的硬件组态,配置CPU315-2PN/DP,注意配置时选择版本V3.2,设置IP地址并选择Ethernet(1) 网络,且设备名为PN-IO-1,参考图11。
图11 315 PN-1站的组态接着,在硬件目录中找到之前创建的GSD文件安装后生成的共享设备“share-IO”,将其拖拽到PN总线Ethernet(1)上,参考图12。
然后,鼠标双击共享设备“share-IO”打开其属性界面,参考图13。
注意:必须更改设备名称,使此处组态的设备名称和CP343站的CP343-1 Lean的设备名称保持一致。
图12 共享设备share-IO的组态图13 更改共享设备share-IO的设备名称最后,再次打开共享设备“share-IO”的属性界面,参考图14设置IO访问权限。
参考图15确认IO访问权限和地址。
图14 设置共享设备的IO访问权限图15 确认IO访问权限和地址编译保存,至此,315 PN-1站配置完毕。
3.1.3 组态315 PN-2站在STEP7中打开315 PN-2站对应的硬件组态,配置CPU315-2PN/DP,注意配置时选择版本V3.2,设置IP地址并选择Ethernet(1) 网络,且设备名为PN-IO-2,参考图16。
图16 315 PN-2站的组态接着,必须到315 PN-1站的硬件组态中,对共享设备share-IO,也就是1号站,使用鼠标右键点击弹出菜单,选择“复制”或者使用快捷键“Ctrl+C”,拷贝该设备。
参考图17。
图17 在315 PN-1站中拷贝共享设备然后,回到315 PN-2站的硬件组态中,使用鼠标右键点击Ethernet(1):PROFINET-IO-System(100)总线,即,弹出菜单选择“粘贴共享”命令,粘贴共享设备,参考图18。
图18 粘贴共享设备这样在315 PN-2站的硬件组态中就出现该共享设备,参考图19,可查看共享设备和315 PN-2站通信的IO数据,其中“完全”访问表示控制器可以对完全访问的模块或子模块进行读写。
参考图20确认IO访问权限和地址。
图19 查看共享设备的IO访问权限图20 确认IO访问权限和地址编译保存,至此,315 PN-2站配置完毕。
3.2 编程作为共享设备的CP343站,需要对发送、接收的数据区进行编程,在OB1中调用通信指令FC11/FC12,填写参数后下载到CPU,参考图21。
图21 CP343站的通信程序其中主要的参数的义如下:1)CPLADDR: 模块起始地址2)MODE: CP操作模式3)LEN: 以字节为单位的将要传送的数据区的长度4)SEND: 发送数据区的地址和长度5)RECV: 接收数据区的地址和长度关于指令FC11/12各个引脚的详细说明,请通过鼠标点击相应的指令块,通过键盘“F1”查看帮助信息。
3.3 通信结果图22 监控变量通信实验结果,如图22:1)CP343站发送数据MW100~102,其中MW100~102共计4个字节发送到315 PN-1站的PIW256~258;MW104~108共计6个字节发送到315 PN-2站PIW256~260。