弹塑性力学 第四章 弹性力学的求解方法
《弹塑性力学》第四章 应力应变关系(本构方程)共42页文档

应变能增量A 中有体积分和面积分,利用
柯西公式和散度定理将面积分换成体积分。
17.04.2020
8
§4-1 应变能、应变能密度与弹性材料的 本构关系
A V fiu id V s F iu id S U VW d V
SF i uidSS(ij ui)njdS V(jiui),j dV
17.04.2020
19
§4-2 线弹性体的本构关系
2.2 具有一个弹性对称面的材料
若物体内各点都有这样一 x3 个平面,对此平面对称方
向其弹性性质相同,则称
此平面为弹性对称面,垂
直弹性对称面的方向称为
弹性主轴。
x1
弹性主轴
x2
17.04.2020
20
§4-2 线弹性体的本构关系
如取弹性对称面为x1 —x2
{}=[c]{}
T 11 22 33 23 31 12
T 11 22 33 23 31 12
17.04.2020
16
§4-2 线弹性体的本构关系
2.1 各向异性材料
{}=[c]{}
C11 C12
C C21 C22
C61 C62
C16
C26
C66
17.04.2020
17.04.2020
3
§4-1 应变能、应变能密度与弹性材料的 本构关系
外力做实功 A: A=U 物体的应变能U
U VWdV
W:应变能密度——单位体积的应变能。
17.04.2020
4
§4-1 应变能、应变能密度与弹性材料的 本构关系
1.2 应变能密度W与材料的i
第四章 应力应变关系(本构方程)
本章讨论弹性力学的第三个基本规律。 应力、应变之关系,这是变形体力学研究问题 基础之一。在前面第二、三章分别讨论了变形 体的平衡规律和几何规律(包括协调条件)。
弹塑性力学线弹性力学问题的基本解法和一般性原理
w ij ij Eijkl kl 线性关系 各向同性 ij
指标符号表示
ij 2G ij ij kk
E ( ij ij kk ) (1 ) 1
2019/1/3 7
§5-1 基本方程和边界条件的汇总
X l x m yx n zx n1 11 n2 21 n3 31
Y l xy m y n zy n1 12 n2 22 n3 32
Z l xz m yz n z n1 13 n2 23 n3 33
§5-1 基本方程和边界条件的汇总
在第二、三、四章较全面的讨论了弹性变 形体在承受外力作用时,发生变形和抗力(内
力),这些变形和内力应遵循的三个基本规律,
从而导出了待求物理量(应力、应变、位移)
所须满足的基本方程,共十五个,现汇总如下。
2019/1/3
1
§5-1 基本方程和边界条件的汇总
1.1 基本方程汇总
当 S = S时称为微分方程第一边值问题;
当 Su = S时称为偏微分方程第二边值问题; 当 Su +S = S 称为偏微分方程第三边值问题。
2019/1/3
11
§5-2 位移法
弹性力学问题的待求函数共15个(ij、 ij 、 ui),如果一视同仁的同等看待,由给定的边界 条件下求偏微分方程组的定解是不可能的。由 物理量所满足的方程组中显示出来)。
2
yz
xy
y yz zx xy ( )2 y x y z zx
2
2 zx z yz xy ( )2 z x y z yx
2019/1/3
6
6弹塑性4_弹性基本问题与解法_2012课件第一部分
第四章一、线性弹性理论适定问题的基本方程和边界条件对于线弹性体小变形的线性问题,建立了一组线性方程组可以描述为在S 为边界的域V 上以u ,ε,σ作为求解变量的偏微分方程边值问题:微分提法2变分提法积分提法第四章第四章适定问题:第四章均匀变形状态()()1222111 1d d E c d d E c νν−=−=第四章弹性力学的基本方程和解法一、线性弹性理论适定问题的基本方程和边界条件 适定问题与非适定问题简例蓝色:边界给定量红色:边界未知量6适定问题例一第四章蓝色:边界给定量红色:边界未知量7适定问题例二第四章蓝色:边界给定量红色:边界未知量8适定问题例三边界全部给定面力时约束刚体位移才能求得确定位移边界全部给定面力时给定面力和体积力必须整体平衡第四章蓝色:边界给定量红色:边界未知量9非适定问题例一有多余边界条件情况一般无解第四章蓝色:边界给定量红色:边界未知量10非适定问题例二边界条件识别(逆问题)复杂!第四章 1.3 界面连续条件第四章弹性力学的基本方程和解法一、线性弹性理论适定问题的基本方程和边界条件II I u u =IIIi i u u =位移面力3个条件0t t =+II I 0II II I I =+ji j ji j n n σσIII S IIS +−u3个条件+12∀X ∈S It I I t0)(II I I =−ji ji j n σσ界面连续条件应为边界条件个数的两倍I S第四章第四章第四章第四章第四章第四章第四章第四章第四章第四章第四章。
弹塑性力学第四章答案
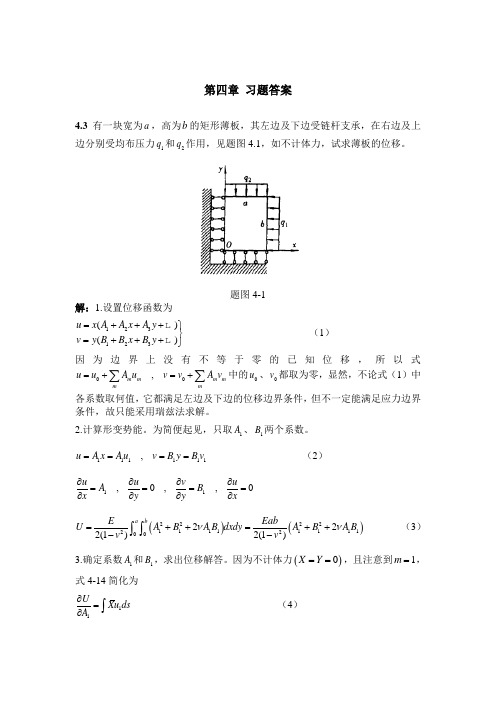
第四章 习题答案4.3有一块宽为a ,高为b 的矩形薄板,其左边及下边受链杆支承,在右边及上边分别受均布压力1q 和2q 作用,见题图4.1,如不计体力,试求薄板的位移。
题图4-1解:1.设置位移函数为123123()()u x A A x A y v y B B x B y =+++⎫⎬=+++⎭(1)因为边界上没有不等于零的已知位移,所以式00,m m m m mmu u A u v v A v =+=+∑∑中的0u 、0v 都取为零,显然,不论式(1)中各系数取何值,它都满足左边及下边的位移边界条件,但不一定能满足应力边界条件,故只能采用瑞兹法求解。
2.计算形变势能。
为简便起见,只取1A 、1B 两个系数。
111111,u A x Au v B y B v ==== (2) 11,0,,0uuvu A B x yyx∂∂∂∂====∂∂∂∂ ()()2222111111112200222(1)2(1)a b E Eab U A B A B dxdy A B A B v v νν=++=++--⎰⎰ (3) 3.确定系数1A 和1B ,求出位移解答。
因为不计体力()0X Y ==,且注意到1m =,式4-14简化为11UXu ds A ∂=∂⎰ (4)11UYv ds B ∂=∂⎰ (5) 对式(4)右端积分时,在薄板的上下边和左边,不是0X =,就是10u =,故积分值为零。
在右边界上有11,,X q u x a ds dy =-===()111bXu ds q ady q ab =-=-⎰⎰ (6)同理,式(5)右端的积分只需在薄板的上边界进行,()1220aYv ds q bdx q ab =-=-⎰⎰ (7)将式(3)、式(6)、式(7)分别代入式(4)、式(5)可解出1A 和1B :()1112222(1)EabA B q ab v ν+=---()1122222(1)EabB A q ab v ν+=--- 121q q A E ν-=-, 211q q B E ν-=- (8) 122111,q q q q u A x x v B y y E Eνν--==-==- (9)4.分析:把式(8)代入几何和物理方程可求出应力分量,不难验证这些应力分量可以满足平衡微分方程和应力边界条件,即式(8)所示位移为精确解答。
弹塑性力学第四章弹性本构关系资料

产生的x方向应变:
叠加
产生的x方向应变:
同理:
剪应变:
物理方程:
说明:
1.方程表示了各向同性材料的应力与应 变的关系,称为广义Hooke定义。也称 为本构关系或物理方程。
2.方程组在线弹性条件下成立。
. 体积应变与体积弹性模量
令: 则: 令:
sm称为平均应力; q 称为体积应变
eij
1 2G
sij
(4.40)
因为 J1 0, J1' 0 ,所以以上六个式子中独立变量只有5个
因此应力偏张量形式的广义虎克定律,即
eij
1 2G
sij
em
1 3K
sm
(4.41)
用应变表示应力:
或: ✓ 各种弹性常数之间的关系
§4-2 线弹性体本构方程的一般表达式
弹性条件下,应力与应变有唯一确定的对应关系,三维 应力状态下,一点的应力取决于该点的应变状态,应力是应 变的函数(或应变是应力的函数) 6个应力分量可表述为6个应变分量的函数。
式(2)中的系数 有36个.
称为弹性常数,共
由均匀性假设,弹性体各点作用同样应力 时,必产生同样的应变,反之亦然.因此 为 常数,其数值由弹性体材料的性质而定.
式(2)推导过程未引用各向同性假设, 故可适用于极端各向异性体、正交各向异性体、 二维各向同性体以及各向同性体等.
式(2)可用矩阵表示
式(3)可用简写为 称为弹性矩阵.
三、. 弹性常数
1. 极端各向异性体:
物体内的任一点, 沿各个方向的性能都不相 同, 则称为极端各向异性体. (这种物体的材料极 少见)
即使在极端各向异性条件下, 式(2)中的36个 弹性常数也不是全部独立.
第四章 结构弹塑性分析

(4.26)
(4.27)
当截面全部成为塑性区时,变形可无限制地流动 → 塑性铰,结构变为机构(破坏) 。此时 设极限荷载为 q0 ,跨中极限弯矩(全部塑性 ξ = 0 )为:
M max
所以:
1 2 bh 2 = q0 l = σs 2 4
(4.28)
bσ q0 = s 2
⎛⎞ ⎜ ⎟ ⎝l⎠
2
(4.29)
李遇春编
如图 4.5,X 方向上配筋所产生的抵抗(分布)弯矩为 M ux (这个弯矩可根据钢筋混凝土 结构理论确定) ,在长度 L sin θ 上的总抵抗弯矩为 M ux L sin θ ,这个弯矩在屈服线上的分量为:
M u1 = ( M x L sin θ ) ⋅ sin θ = M x L sin 2 θ
图462屈服线计算理论i屈服线上的抵抗弯矩图47如图47x方向上配筋所产生的抵抗分布弯矩为ux这个弯矩可根据钢筋混凝土结构理论确定在长度sin上的总抵抗弯矩为uxsinsin443同理y方向上的配筋抵抗弯矩在屈服线上的分量为
同济大学水利工程系
李遇春编
第四章 结构弹塑性分析
1、弹塑性力学边值问题的提法 (1)全量理论边值问题
(ⅳ)边界条件: 在应力边界 sσ 上:
dσ ij l j = dPi
(4.13) (4.14) (4.15)
(4.16)
在位移边界 su 上: dui = dui
(4.17)
同济大学水利工程系
李遇春编
2、 梁的弹塑性弯曲
图 4.2 如图 4.2 的简支梁,梁的变形满足平截面假设。根据材料力学(弹性力学) ,梁内的应力 状态为: σ x = σ (≠ 0) , σ y ≈ 0 (与其它量比,可忽略不计) , τ xy = τ
第四章-弹塑性力学问题的微分提法与基本解法
2021/6/9
5
第四章 弹塑性力学问题的微分提法与基本解法
基本方程——平衡(运动)微分方程(Navier方程)
x
x
xy
y
xz
z
X
0(
2u
t
2
)
yx
x
y
y
yz
以及
xl1 yxl1
xyl2 yl2
xzl3 yzl3
X Y
zxl1
zyl2
zl3
Z
u u,v v,w w
给定面力边界 给定位移边界
2021/6/9
20
第四章 弹塑性力学问题的微分提法与基本解法
弹性力学问题的基本解法——基本思想
从几何方程和本构方程中可以发现,6个应力分量、6个 应变分量和3个位移分量之间不是彼此无关的。比如说,只要 知道了位移分量,通过Cauchy方程,就可得到应变分量,再 通过本构方程,就可确定应力分量;反之,如果知道了应力 分量,则可通过本构方程求得应变分量,不过这时求得的应 变分量必须满足一组补充方程,即应变协调方程,以保证固 体在变形后的连续性,然后再通过对Cauchy方程的积分求位 移分量。可见,在求解一个弹性力学问题时,并不需要同时 求出所有的未知函数。
⑵ 将上式代入平衡微分方程,可得
若注意到
G(ui, jj
u j,ij ) uk ,kj ij
Xi
0(
2ui t 2
)
则有
u j,ij (u j, j ),i ,i
uk,kj ij uk,ki (uk,k ),i ,i
弹塑性力学 弹性与塑性力学的解题方法

➢主应力法
➢ 主应力法是金属塑性成形中所经常使用的 一种简化方法。在分析问题时,认为剪应 力对材料的屈服影响很小,因而在屈服条 件中略去剪应力,这时平面应变问题中的 屈服条件可简化为
x - y = 2k
➢ 在分析中,还假设应力在一个方向的分布 是均匀的。因此在计算中,数学形式比较 简便。
➢ 平面应力问题,平面应变问题,结果转换 ➢ 平面问题的平衡方程(无体力)
x
xy
0
x y
yx x
y
y
0
➢ 艾里(Airy)应力函数
x
2
y 2
,
y
2
x 2
,
xy
2
xy
➢ 用应力函数表示的物理方程
➢ 变形协调条件
x
1 2G(1
)
2
y 2
2
x 2
y
2G
1 (1
)
2
x 2
几种应力函数所对应的边界条件
➢ = ax + by + c 矩形弹性体处于无应力状态,
即在边界上无面力。
➢ = ax2 + bxy + cy2 矩形弹性体受双向荷载。
a > 0, c > 0, b = 0
a = c = 0, b 0
➢ = ax3 + bx2y + cxy2 + dy3 复杂应力状态, 当a = c = b = 0, d 0时,xy = 6dy,为纯弯
2
y 2
xy
1 G
2
xy
4 x
y 4
4 y
x 4
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
相容方程。
G
2u x
(
G
)
x
X
0
G 2u y
(
G )
y
Y
0
G 2uz
(
G)
z
Z
0
2 x22 y22 z22
x y z
ux uy uz x y z
位移控制方程指标表示:
G 2 u i ( G )u j,ji F i 0
力边界条件也可用位移表述。
3个位移表述的平衡微分方程,包含3个位 移未知数。
说明:
1、数学上可证明, 当为线弹性小变形情况,求解的 基本方程和边界条件为线性,叠加原理成立。
2、对大变形情况,几何方程出现二次非线性项,平 衡微分方程将受到变形的影响,叠加原理不再适 用。
3、对非线弹性或弹塑形材料,应力应变关系是非线 性的,叠加原理不成立。
4、对载荷随变形而变的非保守力系或边界为 用非线性弹簧支承的情况,边界条件是非 线性的,叠加原理也将失效。
END
衡方程——位移法控制方程
2. 应力法:以应力作为基本未知量。将相容方程用 应力表示——应力控制方程
3. 应力函数法:先引入应力函数,相容方程用应力
函数表示——应力函数表示的控制方程。
1. 位移法:将几何方程代入物理方程,得到用位移
表示的应力分量,再将应力分量代入平衡方程和应力边
界条件,即得到空间问题的位移法控制方程。不需要用
几何方程 6个 本构方程 6个
共15个方程
15个基本方程求解15个未知量,数学上有解。
协调方程是应变解的条件,保证变形前后物体连续。
微分方程求解过程需要积分,积分常数由边界条件确 定。
§7-2 弹性力学求解方法
• 求解弹性力学问题有位移法、应力法和应力函 数法三种方法。
1. 位移法:以位移作为基本未知量用,位移表述平
结合边界条件,解上述方程,可求出位移分 量,由几何方程求应变,再由本构方程求应力。
2. 应力解法:将由应力表示的应变本构方程式代 入协调方程式,得应力表示的协调方程(应力控 制方程)。
2x
1
1
2I1 x2
0
2y
1
1
2I1 x2
0
2z
1
1
2I1 x2
0
2xy
1
1
2I1 xy
0
2yz
1
1
2I1 yz
二. 解的唯一性定理:
在给定载荷作用下,处于平衡状态的弹性体, 其内部各点的应力、应变解是唯一的,如物体刚 体位移受到约束,则位移解也是唯一的。
无论何方法求得的解,只要能满足全部基本方 程和边界条件,就一定是问题的真解。
三.圣维南原理: 提法一:若在物体的一小部分区域上作用一自平衡力系,则
此力系对物体内距该力系作用区域较远的部分不产生 影响只在该力系作用的区域附近才引起应力和变形。
提法二:若在物体的一小部分区域上作用一自平衡力系,该 力系在物体中引起的应力将随离力系作用部分的距离 的增大而迅速衰减,在距离相当远处,其值很小,可 忽略不计。
提法三:若作用在物体局部表面上的外力,用一个静力等效 的力系(具有相同的主矢和主矩)代替,则离此区域较 远的部分所受影响可以忽略不计。
• 利用圣维南原理可放宽边界条件,扩大弹 性力学的解题范围。
2G
3
2G
xy
xy G
yz
yz G
zx
zx G
✓ 各种弹性常数之间的关系
xyz
G 2 1 E , 1 E 1 2 ,K 3 1 E 2
4. 相容方程
2 x y2
2 y x2
2 xy xy
2 y z2
2 z y2
2 yz yz
2 z x2
2 x z2
zx
xz
w x
u
z
ij12(ui,j uj,i)
3. 物理方程
x 2 G x y 2 G y
z 2 G z xy G xy
yz G yz
zx G zx
kkxyz
ij ij2G ij
x
x 2G
2G
3
2G
y
y 2G
2G
3
2G
z
z 2G
第四章 弹性力学问题的求解方法
§7-1 弹性力学基本方程
1. 平衡微分方程方程
x x
yx y
zx z
X
0
xy x
y y
zy z
Y
0
xz
yz
z
Z
0
x y z
2. 几何方程
x
u x
y
v y
z
w z
xy
yx
v x
u y
yz
zy
w y
v
z
2 zx xz
2
2 x yz
x
yz x
zx y
xy z
2
2 y zx
y
yz
x
zx y
xy z
2
2 z xy
z
yz
x
zx y
xy z
• 求解物理量:6个应力分量 6个应变分量 3个位移分量
共15个未知量
用于求解的方程:平衡微分方程 3个
实际结构件往往同时受到几组载荷作用,如果 直接求所有载荷作用下的弹性力学问题的解,可 能很复杂。而求单一载荷作用下的弹性力学问题 的解,一般更简单。
通过求不同单一载荷作用下的弹性力学问题的 解,再用叠加方法获得复杂载荷的解的过程称为 解的叠加原理。
叠加原理:弹性体受几组外力同时作用时的解 等于每一组外力单独作用时对应解的和。
0
2zxij 0
3. 应力函数法:先引入应力函数,满足微分平衡方
程。由微分平衡方程得应力函数与应力分量的关系, 再将用应力函数表示的应力分量代入相容方程,得到 一组用应力函数表示的相容方程,即应力函数表示的 控制方程。
§7-1 弹性力学解的性质
一、解的叠加原理