第五讲 大M法
《管理运筹学》02-4两阶段法和大m法
大M法的优势与局限性
优势
大M法能够处理大规模的整数规划问题,且计算过程相对简单,容易实现。
局限性
大M法只能求得问题的近似解,而非最优解,且当M值选取不合适时,可能导致求解结果偏离最优解 较远。同时,对于一些特殊问题,如非线性、非凸等问题,大M法可能无法得到满意的结果。
04
大M法实施步骤
确定问题与目标
局限性
两阶段法需要花费更多的计算时间和资源,因为需要进行多次迭 代和优化。此外,两阶段法对于初始解的选择比较敏感,如果初 始解不好,可能会导致算法陷入局部最优解,而非全局最优解。
02
两阶段法实施步骤
阶段一:问题建模与求解
80%
确定问题目标
明确问题的目标,并将其转化为 可量化的数学模型。
100%
建立数学模型
两阶段法案例
总结词
两阶段法是一种常见的求解线性规划问题的方法,通过将问题分解为两个阶段进行求解, 可以找到最优解。
详细描述
在第一阶段,两阶段法首先确定一个初始解,然后通过迭代不断改进这个解,直到满足 一定的收敛条件。在第二阶段,两阶段法使用一种称为对偶单纯形法的方法来求解子问
题,最终得到最优解。
大M法案例
输出求解结果,包括最优解、最优值等。
分析结果与决策
结果分析
对求解结果进行分析,包括最优解的合理性、最优值的可行性等。
制定决策方案
根据分析结果,制定相应的决策方案,包括最优解的实施方案、次 优解的备选方案等。
方案评估与选择
对制定的决策方案进行评估和选择,确保方案符合实际需求和可行 性。
05
案例分析
《管理运筹学》02-4两阶段法 和大m法
目
CONTENCT
单纯形法大M法两阶段法

大M法和两阶段法
如果线性规划模型中约束条件系数矩阵中不存在单位向量组,解 题时应先加入人工变量,人工地构成一个单位向量组。 人工变量只起过渡作用,不应影响决策变量的取值。
两种方法可控制人工变量取值使用,尽快地把人工变量减小到零。
• 大M法 • 两阶段法
大 M法
大M单纯形法要求将目标函数中 min z = -3X1 + X2+X3 的人工变量被指定一个很大的 x1 - 2x2 + x3 ≤ 11 目标函数系数(人工变量与松 - 4x1 + x2 +2 x3 ≥ 3 弛剩余变量不同之处)。 - 2x1+ x3 = 1 x1 ,x2 ,x3 ≥ 0
xk进基,xBr离基,用Pk替代PBr得新的可行基B
bi br r=min{ | aik 0} ark aik
步5.以ark为主元素进行迭代.转步2
新可行解:x=(xB1,…xBr-1,0,xBr+1,…,xBm,0,…, 0,xk,0,…,0)
单纯形法流程图
开始 初始可行基
所有σj≥0?
目录
1 2 3 4 单纯形算法计算步骤 初始可行基的确定 大 M法 两阶段法
线性规划的单纯形算法
计算流程
初始基本可行解
N 沿边界找新 的基本可行解
是否最优解或 无限最优解? Y
结束
线性规划解的概念
若A = ( B, N ), 其中B ( P 1, P 2 , …,Pm )可逆,称B为基矩阵 x1 x2 xB 相应地X= , x B为基变量,x N为非基变量 xN xn xB 代入约束:(B,N)B-1b-B 1Nx N xN
大M法和两阶段法
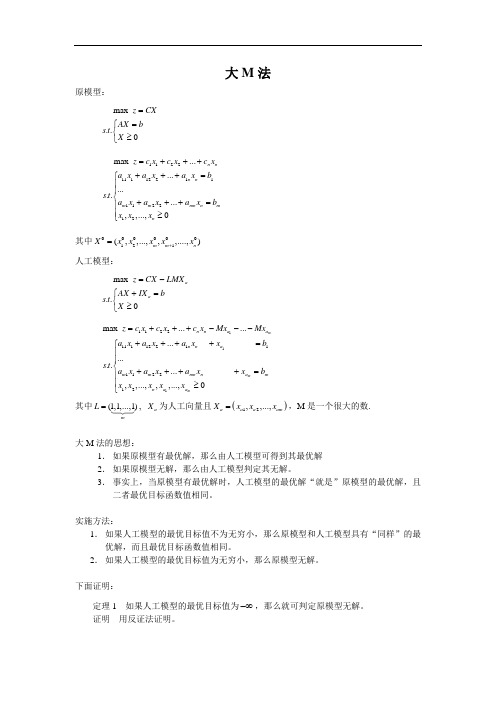
大M 法原模型:max ..0z CX AX b s t X ==⎧⎨≥⎩112211112211112212 max ..............,,...,0n n n n m m mn n m n z c x c x c x a x a x a x b s t a x a x a x b x x x =++++++=⎧⎪⎪⎨+++=⎪⎪≥⎩ 其中000000121(,,...,,,....,)m m n X x x x x x +=人工模型:max ..0a a z CX LMX AX IX bs t X =-+=⎧⎨≥⎩111112211112211112212max ......... ........ ,,...,,,...,0m m m n n a a n n a m m mn n a m n a a z c x c x c x Mx Mx a x a x a x x b s t a x a x a x x b x x x x x =+++---++++=⎧⎪⎪⎨++++=⎪⎪≥⎩其中(1,1,...,1)mL =, a X 为人工向量且()12,,...,a a a am X x x x =,M 是一个很大的数.大M 法的思想:1. 如果原模型有最优解,那么由人工模型可得到其最优解 2. 如果原模型无解,那么由人工模型判定其无解。
3. 事实上,当原模型有最优解时,人工模型的最优解“就是”原模型的最优解,且二者最优目标函数值相同。
实施方法:1. 如果人工模型的最优目标值不为无穷小,那么原模型和人工模型具有“同样”的最优解,而且最优目标函数值相同。
2. 如果人工模型的最优目标值为无穷小,那么原模型无解。
下面证明:定理1 如果人工模型的最优目标值为-∞,那么就可判定原模型无解。
证明 用反证法证明。
设原问题有可行解,那么也存在基本可行解,设为000000121(,,...,,,....,)m m n X x x x x x +=,那么必有0CX >-∞。
大M法和两阶段法
1
0 0 0 1 0 0 0 1 0 0 0
-1
3 2 5M-3 0 1 0 -2 0 1 0 -2
2
-7 -1 -8M+5 -1/3 -7/3 (11/3) 11/3M+7/3 0 0 1 0
-1
(3) 2 5M-1 0 1 0 0 0 (1) 0 0
0
1 0 0
0
0 1 0 0 0 1 0 → 2/3 5/2 →
→
两阶段法
第一阶段:引入辅助问题
max S x5 x6 x7 s.t. x1 x 2 2 x3 x 4 x5 2 2 x1 x 2 3 x3 x 4 x6 6 x1 x3 x3 x 4 x7 7 x j 0, j 1,2, ,7
Cj 段 ↓ -1 1
→ 基 x5
0 b 2
0 P1 (1)
0 P2 -1
0 P3 2
0 P4 -1
-1 P5 1
-1 P6 0
-1 Qi P7 0 2 → 注
-1
-1 Cj-Zj 0
x6
x7 → x1 x6 x7 → x1 x4
6
7 15 2 2 5 7 8/3 2/3
2
1 4 1 0 0 0 1 0
大M法
引入人工变量x5,x6,x7,将原问题化为
max F 2 x1 x 2 x3 x 4 M ( x5 x6 x7 ) s.t. x1 x 2 2 x3 x 4 x5 2 2 x1 x 2 3x3 x 4 x6 6 x1 x3 x3 x 4 x7 7 x j 0, j 1,2,,7
Cj-Zj 0
线性规划-大M法、两阶段法与几种特殊情况

进基变量的相持
出基变量的相持
max
z=
4x1
+2x2
-3x3
+5x4
s.t.
2x1
-x2
+ x3
+2x4
≥50
(1)
3x1
-x3
+2x4
80
(2)
x1
+x2
+x4
= 60
(3)
x1,
x2,
x3,
x4
≥ 0
1-4 线性规划- 大M法、两阶段法及几种特殊情况
单击添加副标题
单击此处添加文本具体内容,简明扼要地阐述你的观点
School of Business ECUST
单纯形法
单纯形法的一般思路+例子
单纯形表结构+例子
单纯形法的计算步骤
单纯形法的矩阵描述
大M法
两阶段法
几种特殊情况
无可行解
无界解
多重最优解
1
X3
0
-3 0 2 0 0 -2-M -M
σj
-1 0 1 0 1 -1 0
1
X5
0
0 0 1/2 3/2 0 -1/2-M -3/2-M
2
X5
0
-1 2+2M -M -M 0 0 0
σj
3/1
0 1 0 0 1 0 0
3
X5
0
X1 x2 x3 x4 x5 x6 x7
3/2
X2
2
1/2/1/2
1 0 -1/2 1/2 0 1/2 -1/2
1/2
第五讲-大M法
min: z = -3x1 + x2 + x3
s.t. x1 - 2x2 + x3 11
-4x1 + x2 + 2x3 3
-2x1
+ x3 = 1
x1, x2,x3 0
在上述方程中加入人工变量,得到第 一阶段的数学模型为:
min: w = x6 + x7
s.t.
x1 - 2x2 + x3 + x4
在max,min如何添加M:max->-M;min>+M
什么时候为无解:基变量中含有人工变量
大 M 法的优缺点
优点:简单、直观,在单纯形表上的 计算步骤与普通单纯形方法相同;
缺点:大 M 到底取多大值?M 取值 太大将增加数值计算的困难。
1.5.2 两阶段法
基本思想:将求解过程分为两个阶段: 第一阶段不考虑原问题是否存在基 可行解; 第二阶段寻找最优解或判断问题无 界。
= 11
-4x1 + x2 + 2x3- x5 + x6 = 3
-2x1
+ x3 + x7 = 1
x1, x2x3 , x04, x5, x6, x7 0
0
cB xB b x1
0 x4 11 1 1 x6 3 -4 1 x7 1 -2
j
6
0 x4 10 3
1 x6 1 0
0 x3 1 -2
第一阶段:构造仅含人工变量的目标函数和 要求实现最小化。如果得到结果为0,说明
原问题存在基可行解,可以进行第二阶段, 否则原问题无可行解,应停止运算。
第二阶段:将第一阶段计算得到的最 终表,除去人工变量。将目标函数行 的系数换成原问题的目标函数系数, 作为第二阶段计算的初始表。
大m法的m取值
大m法的m取值
大M法是一种用于解决最小二乘问题的迭代算法。
它是在许多数据科学领域中广泛应用的一种优化算法。
在大M法中,M是一个控制算法行为的参数。
它通常被设置为非常大的值,以确保算法能够找到最小二乘问题的最优解。
M的取值必须满足两个条件。
首先,它必须足够大,以确保算法能够稳定地收敛到最小二乘问题的最优解。
其次,M的取值必须小于某些限制,以避免数值溢出和精度问题。
通常,该限制由计算机的算术精度和存储能力决定。
一般来说,我们可以根据具体的最小二乘问题进行实验,通过不同的M值运行算法,并观察结果的稳定性和速度。
通过对比实验,我们可以选择一个适当的M值,以使算法能够快速且稳定地收敛到问题的最优解。
总之,M的取值在大M法中非常重要。
我们必须谨慎选择M的取值,以确保算法能够正确地解决最小二乘问题,并且快速地收敛到最优解。
大M法:线性规划
大M 法大M 法的求解线性规划的过程和单纯形法一样,不同的是对线性规划的一般形式的处理方式,大M 法将线性规划min ,..0Ax b f Cx s t x =⎧=⎨≥⎩转化为如下问题min ,..,0T Ax y b f cx Me s t x y +=⎧=+⎨≥⎩步骤如下:(1) 首先将线性规划min ,..0Ax b f Cx s t x =⎧=⎨≥⎩转化成如下问题 min ,..,0T Ax y b f cx Me s t x y +=⎧=+⎨≥⎩; (2) 确定初始基变量矩阵B ;求解方程;(3) 令0N x =,计算B B f c x =;其中B c 和N x 分别代表基变量和非基变量的值,B c 表示基变量在目标函数中的系数;(4) 求解方程B B c ω=,对于所有非基变量计数判别数j j j j z c p c ω-=-,其中j p 为非基变量在约束系数矩阵中相对应的列,令max()k k j j z c z c -=-,如果0k k z c -≤,则停止计算,输出最优解,否则转步骤5;(5) 求解方程k k By p =,若k y 的每个分量均大于0,则问题不存在最优解,否则转步骤6;(6) 令min |0s i sk sk ik b b y y y ⎛⎫=> ⎪⎝⎭,其中B b x =,用k p 代替Bs p ,得到新的基变量矩阵B 再转步骤3计算。
例:12312312313123211423min 3,..21,,0x x x x x x f x x x s t x x x x x -+≤⎧⎪-++≥⎪=-++⎨-+=⎪⎪≥⎩解:先把上面的一般形式化为标准形式:123671234123561371234567min 3()21142321,,,,,,0f x x x M x x x x x x x x x x x x x x x x x x x x x =-++++-++≤⎧⎪-++-+≥⎪⎨-++=⎪⎪≥⎩ 得出:1211000114120110,320100011[31100]A b c M M -⎡⎤⎡⎤⎢⎥⎢⎥=--=⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦=-- 在MATLAB 命令窗口输入:A=[1 -2 1 1 0 0 0;-4 1 2 0 -1 1 0;-2 0 1 0 0 0 1];c=[-3 1 1 0 0 2 2];b=[11;3;1];[x,minf]=ModifSimpleMthd(A,c,b,[4 6 7])所得结果:x =4.0000 1.0000 9.0000 0 0 0 0 minf =-2.0000如果M=1会怎样?A=[1 -2 1 1 0 0 0;-4 1 2 0 -1 1 0;-2 0 1 0 0 0 1];c=[-3 1 1 0 0 1 1];b=[11;3;1];[x,minf]=ModifSimpleMthd(A,c,b,[4 6 7])得到的结果:x =4.0000 1.0000 9.0000 0 0 0 0 minf =-2.0000从结果可以看出,m=1 对结果没有影响。
线性规划-大M法、两阶段法与几种特殊情况课件
0 1 001 -1 2+2M -M -M 0
00 00
3 3/1
2 0 -1 1 0 1 -1
1 1/2
-1 1 0 -1 0 0 1
1
-
1 0 0 1 1 0 -1
2 2/1
1+2M 0 -M 2+M 0 0 -2-2M
1 0 -1/2 1/2 0 1/2 -1/2
1/2
0 1 -1/2 -1/2 0 1/2 1/2
-Mx7
-Mx8
s.t.
2x1
-x2
+ x3
+2x4
-x5
+x7
=50
(1)
3x1
-x3
+2x4
+x6
= 80
(2)
x1
+x2
+x4
+x8
= 60
(3)
x1,
x2,
x3,
x4,
x5,
x6,
x7,
x8 ≥ 0
添加人工变量
min z=
4x1
+2x2
-3x3
+5x4
+Mx7
+Mx8
s.t.
2x1
-x2
+ x3
max z= 4x1 +2x2 -3x3 +5x4
s.t.
2x1 -x2 + x3 +2x4 -x5
=50 (1)
3x1
-x3 +2x4
+x6 = 80 (2)
x1 +x2
+x4
x1, x2, x3, x4, x5,
线性规划大M法或两阶段法
两阶段法
阶段Ⅰ 求解人造极大问题(先将线性规划问题化标准型,并 将其约束条件中加入人工变量,得第一阶段的数学模型)
max w = -xn+1 -xn+2 - … -xn+m 或者 min w = xn+1 +xn+2 + … +xn+m
s.t. ( 2.1 )
人工变量的系数 均为1或-1
因为人工变量
2x2
x
-
3
M
x
6
Mx7
4x1 3x2 x3 x4 x6 4
x
1
x2
2x3
x5
10
2
x
1
2x2
x3
x7
1
x j 0, j 1,2,,7
其中:M是一个很大的抽象的数,不需要给出具体的数值, 可以理解为它能大于给定的任何一个确定数值;再用前面介 绍的单纯形法求解该模型,计算结果见下表。
x1, x2, x3 , x4, x5 ≥ 0
一、大M法
cj 基 解
-M -M
xx45
6 4
3 -1
x1
x2
-2
x3
-M
x4
-M
x5
比值
3 2 -3 1 0 2 min
1 -2 1 0 1 4
10M 3+4M -1 -2+2M 0
0
3 x1 2 1 2/3 -1 1/3 0 -M x5 2 0 -8/3 22 -1/3 1
000Fra bibliotek-M0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基本思想
在目标函数中赋予人工变量很大的惩罚系
数 M;
用线性规划的优化机制迫使人工变量出基,
从而找到一个初始可行解;
如果无法使人工变量出基,原问题无可行
解。
m ax z c1 x1 c 2 x 2 .... c n x n M x n 1 ... M x n m
第一章 线性规划
运筹帷幄,决胜千里
史记《张良传》
第 五 讲
(2 学时)
1.5 如何寻找初始可行解
如果线性规划的约束都是
约束,右边项的值都 大于等于零,其初始可行解很容易找到,松弛 变量对应的单位矩阵即是一个初始可行基;
一般线性规划问题的初始可行解不一定很容易
找到;
这时需要引入人工变量,并使用特殊的方法找
4 5 6 7
cB 0 M M
xB b x4 11 x6 3 x7 1
j
0 x4 10 M x6 1 1 x3 1
j
-3 x1 1 -4 -2 -3+6M 3 0 -2
-1
1 1 0 x2 x3 x4 -2 1 1 1 2 0 0 1 0 1-M 1-3M 0 -2 0 1 1 0 0 0 1 0 0 1-M 0 0 1 0 0 0 0 1 0 1 0 0 0
0 cB xB 0 1 1 0 1 0 0 0 0 b x1 1 -4 -2 6 3 0 -2
0
0 x2 -2 1 0 -1 -2 1 0 -1 0 1 0 0
0 x3 1 2 1 -3 0 0 1
0
0 x4 1 0 0 0 1 0 0
0
0 x5 0 -1 0 1 0 -1 0
1
1 x6 0 1 0 0 0 1 0
例3 用大 M 法求解:
min: z = -3x1 + x2 + x+0x4+0x5 +Mx6 +Mx7 3 s.t. x1 - 2x2 + x3 + x4 = 16 -4x1 + x2 + 2x3 - x5 + x6 = 20 -2x1 + x3 + x7= 10 x1, x2x3 x , x , x , x 0 , 0
s.t. x1 - 2x2 + x3 11 -4x1 + x2 + 2x3 3 -2x1 + x3 = 1 x1, x2,x3 0
在上述方程中加入人工变量,得到第 一阶段的数学模型为:
min: w = x6 + x7
s.t.
x1 - 2x2 + x3 + x4 = 11 -4x1 + x2 + 2x3- x5 + x6 = 3 -2x1 + x3 + x7 = 1 x1, x2x3 x4, x5, x6, x7 0 , 0
选取检验数>0中下标最小的非基变量xk 为换入变量。 利用 规则计算存在两个和两个以上最 小比值时,选取下标最小的基变量作为 换出变量。
布置作 业
目的 掌握LP大M求解法;
掌握LP的两阶段求解法;
内容
P45
1.6 (2)
大 M 法的优缺点
优点:简单、直观,在单纯形表上的
计算步骤与普通单纯形方法相同; 缺点:大 M 到底取多大值?M 取值 太大将增加数值计算的困难。
1.5.2 两阶段法
基本思想:将求解过程分为两个阶段:
第一阶段不考虑原问题是否存在基
可行解; 第二阶段寻找最优解或判断问题无 界。
第一阶段:构造仅含人工变量的目标函数和
0 x5 0 -1 0 M 0 -1 0
M
M x6 0 1 0 0 0 1 0
0
M x7 0 0 1 0 -1 -2 0
3M1
11 3/2 1
1
0 x4 12 1 x2 1 1 x3 1
j
3 0 -2 -1
-2 -1 0 1
2 -5 4 1 -2 0 1 M-1 M+1
三个问题
M用来干什么的?:是人工变量=0,例如 目标函数求max时,若人工变量>0,则不 存在最优解可使目标函数达到最大 在max,min如何添加M:max->-M;min>+M 什么时候为无解:基变量中含有人工变量
要求实现最小化。如果得到结果为0,说明 原问题存在基可行解,可以进行第二阶段, 否则原问题无可行解,应停止运算。
第二阶段:将第一阶段计算得到的最 终表,除去人工变量。将目标函数行 的系数换成原问题的目标函数系数, 作为第二阶段计算的初始表。
例3 用两阶段 法求解:
min: z = -3x1 + x2 + x3
0
1 x7 0 0 1 0 -1 -2 1
3
11 3 /2 1
x4 1 1 x6 3 x7 1
j
x4 1 0 x6 1 x3 1
j
1
x4 1 2 x2 1 x3 1
ห้องสมุดไป่ตู้
3 0 -2 0
0 0 1 0
1 0 0 0
-2 -1 0 0
2 1 0 1
-5 -2 1 1
4
j
0
第二阶段迭代:
退化
勃兰特规则:
到初始可行解。
加入人工变量构造初始基:
对
对 对
约束, 引入松弛变量。
约束, 引入一剩余变量和一人 工变量。 = 约束,引入一人工变量。
m ax z c1 x1 c 2 x 2 .... c n x n
x n 1 ....
xnm
1.5.1 大 M 法