第二章 控制系统状态空间表达式的解
第二章 控制系统状态空间表达式的解
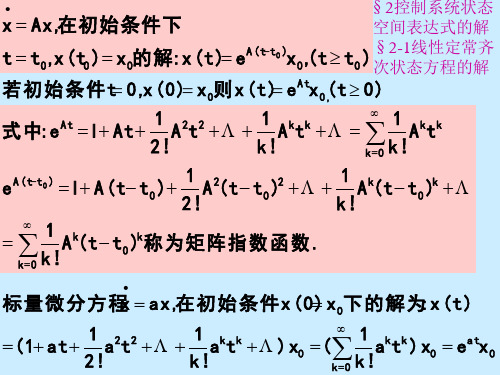
从而 称为状态转移矩阵
1 22 1 k k e = I + At + A t + L + A t + L 2! k!
At
x(t ) = e At x0
x(t ) = e A( t −t0 ) x0 这个解反映了从初始时刻的状态向量 x0 ,到任意时 刻的状态向量 x(t ) 的一种变换关系,变换矩阵就是 e At 称为状态转移矩阵,通常记为 φ (t ) 矩阵指数, 几个特殊的矩阵指数函数 1. 若A为对角线矩阵 2. 若A能通过非奇异变换变换成对角线矩阵 3. 若A为约旦矩阵
二、φ (t ) 或 e
1. 根据
At
的计算
e
At
或 φ (t )的定义直接计算
例: 试求如下线性定常系统的状态转移矩阵
& x1 0 x = − 2 &2
At
1 x1 −3 x 2
2 2 3
1 0 0 1 0 1 t 0 1 3 Φ (t ) = e = + −2 −3 t + −2 −3 2! + −2 −3 t + L 0 1 3 7 t − t2 − t3 +L 1− t 2 + t3 +L 2 6 = −2t + 3t 2 − 7 t 3 + L 1 − 3t + 7 t 2 − 5 t 3 + L 3 2 2
t 0 0
At
t
− Aτ
t
Bu (τ ) dτ
x(t ) = e x0 + ∫ e A(t −τ ) Bu (τ )dτ
状态空间表达式的解讲解

§2-2 矩阵指数函数---- 状态转移矩阵
矩阵指数函数:
e At I At 1 A2t 2 1 A3t 3 ... 1 Ak t k ....
2!
3!
k!
从
可看出:
形式上是一个矩阵指数函数,且也是一个各元
素随时间t变化的n×n矩阵。但本质上,它的作用是将
时刻的系统状态矢量
转移到t时刻的状态矢量
1 0 ... 0
A J 0
1 ...
0
.......... .......... ......
0
0
0 ...
1 t
1 t2 ... 2!
(
n
1 - 1)!
t
n1
0 1 t
...
(n
1 - 2)
!
t
n
2
则
(t) eJt et ..............................................
1 t
1 t2 2!
...
1 t n1 (n -1)!
0 1 t
...
(n
1 - 2)!
t
n
2
.
.
T * et ............................
*T 1
0 0 0 .... t
0 0 0 ... 1
控制系统状态空间表达式的解
4. 应用凯莱-哈密尔顿定理(Cayley-Hamilton)求eAT
e 1t
0
T
*
e2t ...........
*
T
1
0
ent
控制系统状态空间表达式的解
现代控制理论_控制系统状态空间表达式的解
2.1.线性定常连续系统状态方程的解
1.齐次状态方程的解表示了系统在初始条件作用 下的自由运动,又称为零输入解;
2.系统状态的变化实质上是从初始状态开始的状 态转移,而转移规律取决于 eAt ,eA(t-t ) 故称其 为状态转移矩阵.一般用 ( t ) e At 来表示。 A( t t ) ( t t0 ) e 3.求齐次状态解的关键是求转移矩阵 eAt
At
x( t ) e
x(t0 ) e A Bu( )d
t0
t t0
t
x( t ) e
A( t t0 )
x(t0 ) e A( t ) Bu( )d
t
也就是 x(t ) (t t0 ) x(t0 ) t (t )Bu( )d
d At At e x ( t ) e Bu dt
e At Ax x
在区间[t0,t]上积分
e
At
x( t )
t t0
e A Bu( )d
t0
t
e
即
e
At
x( t )
t t0
e A Bu( )d
t0
At0
t
s 3 1 1 2 s s s 3 2
s 1 s 2 s s 1 s 2 1
s3 s 1 s 2 2 s 1 s 2
s 1 ( sI A) 1 s 2
Φ(t ) L
1
sI A
1
(1 t )e t t te
现代控制理论 刘豹
0 2 2 A 1 3,..B 0
matlab的m文件文本如下: A=[0 -2 ;1 -3]; B=[2; 0]; fait02=expm(A*0.2) fait04=expm(A*0.4)
2-6 应用Matlab的系统运动分析
求下列系统在u=1(t)时的状态响应和输出响应
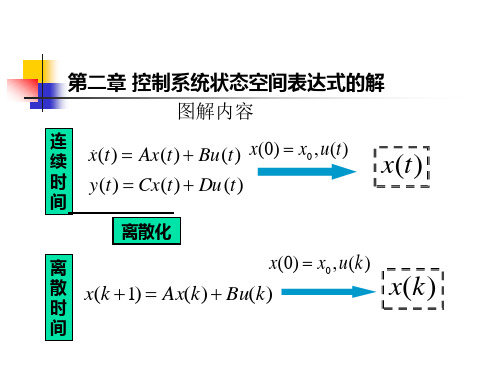
第二章 控制系统状态空间表达式的解 图解内容
连 续
x(t) Ax(t) Bu(t) x(0) x0,u(t)
时 y(t) Cx(t) Du (t)
间
x(t)
离散化
离
x(0) x0,u(k)
散 x(k 1) Ax(k) Bu(k)
x(k)
时
间
第二章 控制系统状态空间表达式的解
主要内容
(1 e2T e2T
)
H
(T
)
1 2
(T 1
e 2T 2
e 2T
1
2
分析选择不同的采样周期T.的影响
2-4 连续时间状态方程的离散化
0.5
0.45 0.4
0.35
continous discrete 1 discrete 0.5
0.3
0.25
0.2
0.15
0.1
0.05
0
0
0.5
2(t t0 )
e(t t0 )
2e2(t t0
)
0 t0 0, x(0) 1
t1
0.2, e At
0.97 0.3
0.15 0.52
x1 x(0.2) eAt1 x(0)
t2
0.4, eAt2
0.89 0.44
2控制系统状态空间表达式的
§2-2-4 矩阵指数函 数求法2例2-3求法3
3.拉氏变换法:Φ(t) eAt L 1[(sI A)1] §2-2 矩阵
指数函数
例
2
4.A
0 2
13,(sI
A)
s 2
1 s 3
求法3例2-4
(sI A)1
1 sI A
adj(sI A)
s2
1 3s 2
s 3
2
1 s
s3
(
s
1)
•
x(t) Ax(t)x,(0) x0
t et et e2t
t
et
2 et
2
e2
t
t et 3 et 4 e2t
两 边 取 拉 氏 变 换:sX(s) x0 AX(s)
(sI A)X(s) x0 X(s)(sI A)1x0
x(t) L 1[(sI A)1]x0
eAt L 1[(sI A)1]
转 移 阵 为 eAt或 eA(tt0 ),其 元 一 般 或 x(t)Φ (t t0 )x(t0 )
为 t的 函 数即, 为 时 变 函 数 阵 ,
意 味 x(t)随 t不 断在 状 态 空
间 转 移 .称 为 状 态 转 移矩 阵 ,
例
:已
知
x
(
0
)
x1 x2
0 0
和
Φ
(
t1
)
则
x
(
t1
)
x1 x2
ab0 ab1t ab2t2 abk1tk1 abktk
比 较 系 数 得:b1 ab0 ax0;
§2-1线性
b2
1 2
a
b1
第二章 控制系统的状态空间表达式的解

A)
(s
1 1)(s
2)
s 3
2
1
s
s3
(s
1)(s
2)
2
(s 1)(s 2)
(s
1 1)(s
2)
s
2
1
s
1
2
s (s 1)(s 2)
2 s 1
s
2
2
s
1
1
s
1
2
1 s 1
s
2
2
∴
eAt
L1
sI A
1
2et 2et
e2t 2e2t
et e2t
算ai t 的一般公式。
A的特征值互异时,则
a0 (t) 1
a1(t) M
1
1 2
L
a
n-1
(t)
1
n
12 K 22 L
L
n2 L
n1 1
n1 2
e1t e2t
M
n
n1
en
t
(2-23)
A的特征值相同,为 时,则
0 0 0 L
a0 (t) a1 (t)
1 1 1 T 1 0 2 ;
1 1 4
2 5 2 T 1 2 3 1
1 2 1
1 1 1 et tet 0 2 5 2
eAt 1
0
2
0
et
0
2
3
1
1 1 4 0 0 e2t 1 2 1
2tet e2t
2(e2t
tet
et )
2tet 4et 4e2t
3tet 2et e2t 3tet 5et 4e2t 3tet 8et 8e2t
现代控制理论(第二章)讲解
sI
A 1
s 2
s3
1 1 s 3
(s
1)(s 2
2)
(s 1)(s 2)
1
(s
1)(s s
2)
(s 1)(s 2)
s3
e At
L1
(s
1)( s 2
2)
(s 1)(s 2)
EAST CHINA INSTITUTE OF TECHNOLOgy
第二章 控制系统状态空间表达式的解
2.1 线性定常齐次状态方程的解(自由解) 2.2 矩阵指数函数——状态转移矩阵 2.3 线性定常系统非齐次方程的解 2.4 * 线性时变系统的解 2.5 * 离散时间系统状态方程的解 2.6* 连续时间状态空间表达式的离散化
(s
1)( s 2
2)
(s 1)(s 2)
1
(s
1)( s s
2)
(s 1)(s 2)
eAt L1
sI A 1
2et e2t 2et 2e2t
et e2t
et
2e2t
et
2e2t
例2-6,利用凯莱-哈密顿定理— -----------------自学! 例2-3与例2-7也请注意自学!
EAST CHINA INSTITUTE OF TECHNOLOgy
2.3 线性定常系统非齐次方程的解
现在讨论线性定常系统在控制作用 方程为非齐次矩阵微分方程:
第2章 控制系统状态空间表达式的解
第二章控制系统状态空间表达式的解§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)本章要点:状态转移矩阵§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)令和t2. 矩阵指数函数的计算方法⎤⎡λλ 2. A的特征值存在重根§2-1 线性定常齐次状态方程的解(自由解)⎤⎡−1112σ§2-1 线性定常齐次状态方程的解(自由解)证明:由指数函数矩阵的定义有:§2-1 线性定常齐次状态方程的解(自由解)k§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)§2-1 线性定常齐次状态方程的解(自由解)(1) 用拉氏变换法计算§2-1 线性定常齐次状态方程的解(自由解)⎤⎡01用凯莱-哈密尔顿法计算系统矩阵的矩阵指数函数一. 状态转移矩阵的定义二. 状态转移矩阵的性质§2-2 状态转移矩阵§2-2 状态转移矩阵§2-3 线性定常系统非齐次方程的解作变量变换:t一. 时变系统状态方程解的特点§2-5 连续时间状态空间表达式的离散化五. 状态转移矩阵的计算§2-5 连续时间状态空间表达式的离散化§2-5 连续时间状态空间表达式的离散化§2-5 连续时间状态空间表达式的离散化§2-5 连续时间状态空间表达式的离散化§2-5 连续时间状态空间表达式的离散化§2-5 连续时间状态空间表达式的离散化§2-6 离散时间系统状态方程的解。
第2章-控制系统状态空间表达式的解教学提纲
即
上式左乘
,得:
注意式(5)等式右边第二项,其中:
(5)
两个拉氏变换函数的积是一个卷积的拉氏变换,即 以此代入式(5),并取拉氏反变换,即得 :
在特定控制作用下,如脉冲函数、阶跃函数和斜坡函数的激励下,则 系统的解式(2)可以简化为以下公式:
1.脉冲响应
即当
时
2.阶跃响应
即当
时
(6)
3.斜坡响应
1.若 A 为对角线矩阵,即 (5)
则 (6)
2.若 A 能够通过非奇异变换予以对角线化,即
则 (7)
3.若 A 为约旦矩阵
则 (8)
4.若 (9)
2.2.4 1.根据
的计算 的定义直接计算
2.变换 A 为约旦标准型 (1)A 特征根互异
其中 T 是使 A 变换为对角线矩阵的变换阵。由式(7),有:
第2章-控制系统状态空间表达式 的解
幂级数形式,即 (4)
代入式(1)得:
(5)
既然式(4)是式(1)的解,则式(5)对任意时刻 都成立,故 的同次 幂项的系数应相等,有:
在式(4)中,令
,可得:
将以上结果代入式(4),故得: (6)
等式右边括号内的展开式是 即
于是式(6)可表示为:
矩阵,它是一个矩阵指数函数,记为 , (7)
再用 的正确性。
代替
即在代替 的情况下,同样可以证明式2)
2.2 矩阵指数函数——状态转移矩阵
2.2.1 状态转移矩阵 齐次微分方程(1)的自由解为:
或
2.2.2 状态转移矩阵(矩阵指数函数)的基本性质 1.性质一
或
(1)
这就是组合性质,它意味着从 转移到0,再从0转移到 的组合。
现代控制理论-第二章-控制系统的状态空间表达式的解
t
t2
2、状态转移矩阵的基本性质
(1) Φ(0) I (2) Φ (t) AΦ(t) Φ(t)A Φ (0) A (3) Φ(t1 t2 ) Φ(t1)Φ(t2 ) Φ(t2 )Φ(t1) (4) Φ1(t) Φ(t), Φ1(t) Φ(t) 证明: I Φ(0) Φ(t t) Φ(t)Φ(t) Φ(t)Φ(t) 推论: x(t) Φ(t)x(0) x(0) Φ1(t)x(t) Φ(t)x(t)
3、几个特殊的矩阵指数函数
(1)设A diag[,1,即2 ,A为, 对n ]角阵且具有互异元素时,有
e1t
0
(t)
e2t
0
e
nt
(2)若A能通过非奇异变换为对角阵时,即 P-1AP Λ
Φ(t) PΦ(t)P1
e1t
x1
x2
0 0
1 x1
0
x2
x(t) eAtx(0) I At 1 A2t 2 1 Akt k x(0)
2!
k!
A2
0 0
10 00
1 0 0 0
0 0
A3
直接求解法:根据定义 标准型法求解:对角线标准型和约当标准型 拉氏反变换法
1)根据状态转移矩阵的定义求解:
eAt I At 1 A2t 2 1 Akt k
2!
k!
对所有有限的t值来说,这个无穷级数都是收敛的 。
求出的解不是解析形式,适合于计算机求解。
例:求解系统状态方程的解 解:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
x ( 0)
x ( t1 )
x ( t2 )
t
t2
0
x1
t1
( t1 0)
( t2 t1 )
2.2 矩阵指数函数——状态转移矩阵
自由运动也即零输入响应的属性:
1、几何表征 为状态空间中由初始状态点出发和由各个时刻变换点构成 的一条轨迹; 2、运动属性 状态随着时间演化轨迹,属于由偏离系统平衡状态的初始 状态引起的自由运动;(典型例子:人造卫星在末级火箭脱 落后的运动轨迹属于以脱落时刻运动状态为初始状态的自由 运动。)
而 b0 x(0)
则解为 x(t ) (1 at
因为
1 22 1 a t a k t k ) x(0) e at x(0) 2! k!
1 22 1 a t at 1 at
模仿标量齐次微分方程的解法,假设线性定常系统齐次状态方程 (1)的解为 (5) x b0 b1t b2t 2 b3t 3 bk t k 将(5)式代入(1)式
(3)设A为 (n n) 约当阵,即 A 则有 0 1 0 1
t e Φ t 0
te t et
t 2 t e 2 te t
t n 1 t e n 1! t n2 t e n 2 ! t te et
0
矩阵指数函数
e A ( t t 0 )
又称为状态转移矩阵,记作 (t t0 )
x (t ) 是由初始状态 x (t0 ) 激励的。因此,这 由于系统没有输入向量, x (t ) 的形态由 e A(t t0 ) 决定,即是由矩阵A 时的运动称为自由运动。
唯一决定的。
2.2 矩阵指数函数——状态转移矩阵
u0
( A, B)
x
Ax , 齐次状态方程的解: x
x
x( t ) |t 0 x(0)
2)、强迫运动:线性定常系统在控制u作用下的运动,称 为强迫运动。
u
( A, B)
非齐次状态方程的解: x Ax Bu ,
x( t ) |t t0 x( t0 )
2.2 矩阵指数函数——状态转移矩阵
(2)当A具有n重特征根 i :约当标准型 约 当 矩 阵 A的 矩 阵 指 数 函 数
it e At A t 1 e Te T T 0 0 teit 1 t n 1e it (n 1)! 1 T teit i t 0 e
2.2 矩阵指数函数——状态转移矩阵 微分性和交换性 二、状态转移矩阵的基本性质 1) 2)
d At e A e At e At A dt
e A0 I
即
即
(t ) A (t ) (t ) A
(0) I
不发生时间推移下的不变性
2.2 矩阵指数函数——状态转移矩阵
2.1 线性定常齐次状态方程的解(自由解)
b1 2b2t 3b3t 2 kbk t k 1
A(b0 b1t b2t 2 bk t k )
等式两边t 同次幂的系数相等,因此有
b1 Ab0 1 1 2 b2 Ab1 A b0 2 2! 1 1 k bk Abk A b0 k k!
2
(3)
将(3)式代入(2)式
b1 2b2t 3b3t k bk t
2
k 1
a(b0 b1t b2t 2 bk t k )
2.1 线性定常齐次状态方程的解(自由解) 等式两边t 的同次幂的系数相等,因此有
b1 ab0 1 1 2 b2 ab1 a b0 2 2! 1 1 k bk abk a b0 k k!
其中: T为使A化为约当标准型的非奇异变换矩阵。 求矩阵指数函数的步骤: 此时的步骤和对角线标准型情况相同:求特征值、特征向量和变 换阵T。
说明的是:对于所有重特征值 i ,构造约当块,并和非重特征 值一起构成约当矩阵,根据状态转移矩阵的性质,求得 e At 。
2.2 矩阵指数函数——状态转移矩阵
2.1 线性定常齐次状态方程的解(自由解)
2、齐次状态方程:
Ax x
x ( t ) e A( t t0 ) x ( t0 ) , t t0
满足初始状态 x ( t ) |t t x ( t0 ) 的解是: 0
满足初始状态 x ( t ) |t 0 x (0) 的解是:
e Te
At
T 1 ATt
T
1
对A进行非奇异线性变换,得到:
A T
1
AT
联立上两式,得到:
e Te T
At At
1
A 有二种标准形式: 对角线矩阵、约当矩阵
2.2 矩阵指数函数——状态转移矩阵 (1)当A的特征值 1 , 2 , , n 为两两相异时:对角线标准型
e 1t 0 1 e At Te A t T 1 T T n t 0 e
3、待定系数法:将e At 化为A的有限项多项式来求解:
(1)凯莱-哈密顿(以下简称C-H)定理: 设n×n维矩阵A的特征方程为:
f ( ) | I A | n an1n1 a1 a0 0
则矩阵A满足其自身的特征方程,即:
2.2 矩阵指数函数——状态转移矩阵
(4)设A为 约当阵,即 则有 sin t t cos t At e (t ) e sin t cos t
2.2 矩阵指数函数——状态转移矩阵
四、状态转移矩阵的计算
直接求解法:根据定义 标准型法求解:对角线标准型和约当标准型 拉氏反变换法 待定系数法: 凯莱-哈密顿定理
e2t
0 n t e
2.2 矩阵指数函数——状态转移矩阵 (2)若A能通过非奇异变换为对角阵时,即
T AT Λ
-1
e1t Φ t T 0
e2t
0 -1 T n t e
2.2 矩阵指数函数——状态转移矩阵
2.2 矩阵指数函数——状态转移矩阵
1、根据状态转移矩阵的定义求解:
e
At
I At
A 2!
2
t
2
A k!
k
t
k
k 0
Ak k!
tk
对所有有限的t值来说,这个无穷级数都是收敛的。 求出的解不是解析形式,适合于计算机求解。
2.2 矩阵指数函数——状态转移矩阵
2、标准型法求解: 思路:根据状态转移矩阵性质:
其中: T为使A化为对角线标准型的非奇异变换矩阵。
求状态转移矩阵的步骤:
1)先求得A阵的特征值 i 。 2)求对应于 i 的特征向量 p i ,并得到T阵及T的逆阵。
3)代入上式即可得到状态转移矩阵的值。
即:A det(I A) 0 i (i I A)pi 0 pi T
2.2 矩阵指数函数——状态转移矩阵
3、形态 自由运动轨迹的形态,由且仅由系统的矩阵指数函数唯一 决定。不同的系统矩阵,导致不同形态的矩阵指数函数,从 而导致不同形态的轨迹。这表明,矩阵指数函数即系统矩阵 包含了自由运动形态的全部信息。
4、趋向平衡状态x=0属性 自由运动轨迹最终趋向于系统平衡状态,当且仅当矩阵指 数函数最终趋向于0;(渐近稳定)
而 b0 x (0)
则线性定常系统齐次状态方程(1)的解为 1 2 2 1 k k x (t ) (1 At A t A t ) x (0) 2! k! 记作 1 2 2 1 k k At e 1 At A t A t 2! k! 则 x (t ) e At x (0)
(6)
(7)
2.1 线性定常齐次状态方程的解(自由解)
A ( t t 0 ) x (t0 ) 则 x (t ) e
如果 t0 0
(8)
将(8)式代入(1)式验证
和
d (t ) x (t ) A e A(t t0 ) x (t0 ) Ax(t ) x dt x (t ) t t e A( t0 t0 ) x (t0 ) x (t0 )
3)可逆性 即 4)传递性 即 5)当且仅当
e
At 1
e At
(t )1 1 (t ) (t )
(t2 t1 ) (t1 t0 ) (t2 t0 ) 分解性
e
又称组合性 A ( t 2 t1 ) A( t1 t0 )
e
e
A ( t 2 t 0 )
一、状态转移矩阵
Ax 已知:线性定常系统的齐次状态方程:x
At x ( t ) | x ( 0 ) x ( t ) e x ( 0) t 0 满足初始状态 的解是:
x ( t ) e A( t t ) x ( t0 ) 满足初始状态 x( t ) |t t x( t0 ) 的解是:
0
0
At e ( t ) 令: A( t t0 ) ( t t0 ) e
x ( t ) ( t ) x (0) 则有: x ( t ) ( t t ) x ( t ) 0 0
线性定常系统的状态转移矩阵
2.2 矩阵指数函数——状态转移矩阵 说明1:状态转移矩阵必须满足以下两个条件: 1)状态转移矩阵初始条件: ( t0 t0 ) I ( t t ) A ( t t ) 2)状态转移矩阵满足状态方程本身: 0 0 说明 2 :对于线性定常系统来说,状态转移矩阵就是矩阵指 数函数本身。 说明3:状态转移矩阵的物理意义: 从时间角度看,状态转移矩阵使状态向量随着时间的推移不断 作坐标变换,不断在状态空间中作转移,故称为状态转移矩阵。