静定结构与超静定结构
结构力学静定结构和超静定结构(建筑类)
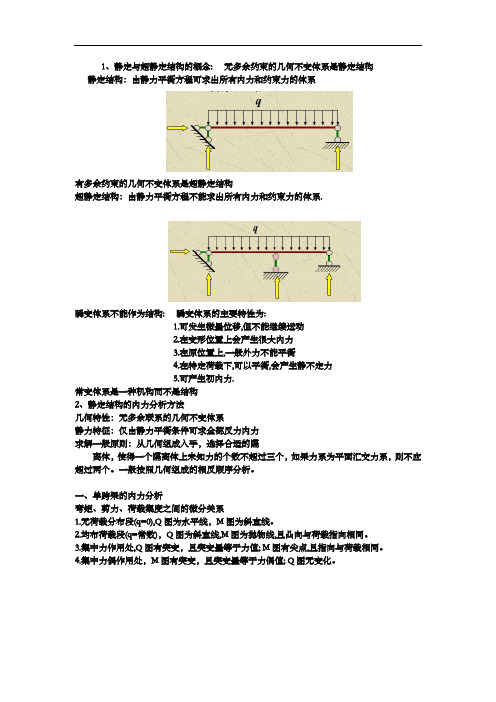
1、静定与超静定结构的概念:无多余约束的几何不变体系是静定结构静定结构:由静力平衡方程可求出所有内力和约束力的体系有多余约束的几何不变体系是超静定结构超静定结构:由静力平衡方程不能求出所有内力和约束力的体系.瞬变体系不能作为结构:瞬变体系的主要特性为:1.可发生微量位移,但不能继续运动2.在变形位置上会产生很大内力3.在原位置上,一般外力不能平衡4.在特定荷载下,可以平衡,会产生静不定力5.可产生初内力.常变体系是一种机构而不是结构2、静定结构的内力分析方法几何特性:无多余联系的几何不变体系静力特征:仅由静力平衡条件可求全部反力内力求解一般原则:从几何组成入手,选择合适的隔离体,使得一个隔离体上未知力的个数不超过三个,如果力系为平面汇交力系,则不应超过两个。
一般按照几何组成的相反顺序分析。
一、单跨梁的内力分析弯矩、剪力、荷载集度之间的微分关系1.无荷载分布段(q=0),Q图为水平线,M图为斜直线。
2.均布荷载段(q=常数),Q图为斜直线,M图为抛物线,且凸向与荷载指向相同。
3.集中力作用处,Q图有突变,且突变量等于力值; M图有尖点,且指向与荷载相同。
4.集中力偶作用处,M图有突变,且突变量等于力偶值; Q图无变化。
内力计算的关键在于:正确区分基本部分和附属部分. 熟练掌握单跨梁的计算.单体刚架(联合结构)的支座反力(约束力)计算方法:切断约束,取一个刚片为隔离体,假定约束力的方向,由隔离体的平衡建立三个平衡方程。
四.刚架弯矩图的绘制做法:拆成单个杆,求出杆两端的弯矩,按与单跨梁相同的方法画弯矩图. 分段定点连线六.由做出的剪力图作轴力图做法: 逐个杆作轴力图,利用结点的平衡条件,由已知的杆端剪力和求杆端轴力,再由杆端轴力画轴力图.注意:轴力图画在杆件那一侧均可,必须注明符号和控制点竖标.。
结构力学静定结构与超静定结构

结构力学静定结构与超静定结构结构力学是研究结构承受外力后的力学性能的学科,它在建筑、机械、航空航天等领域都扮演着重要的角色。
在结构力学中,我们可以将结构分为两类:静定结构和超静定结构。
静定结构是指在确定边界条件下,结构的所有支反力以及结构内部的应力分布等参数都可以通过静力平衡方程唯一求解出来的结构。
在静定结构中,支反力的计算可以通过平衡方程解决,而应力的计算可以通过弹性力学理论求解。
以简支梁为例,简支梁的两端固定支承,中间用力作用时,通过平衡方程可以求解出支反力。
而根据梁的几何形状和荷载的大小,可以计算出梁内部的应力分布。
在静定结构中,支反力和应力可以通过简单的数学计算求解,因此设计和分析起来相对简单。
而超静定结构则相对复杂一些。
超静定结构是指在确定边界条件下,结构的参数无法通过静力平衡方程唯一求解出来的结构。
这意味着在求解超静定结构时,不仅需要静力平衡方程,还需要考虑结构的变形和材料的本构关系等。
以悬臂梁为例,悬臂梁的一端固定支承,另一端悬空。
在悬臂梁上增加一个附加支承,形成一个超静定结构。
在这种情况下,由于支承力未知,无法通过静力平衡方程唯一求解出来。
因此,我们需要考虑结构的变形情况,并将其作为一个未知数来求解。
在超静定结构中,我们通常采用的方法是引入截面变形理论和力法。
通过假设结构具有一定的变形形态,并利用力法求解出结构的变形、应力和支反力等参数。
通常情况下,超静定结构的计算需要较为复杂的数学方法和计算机仿真。
静定结构和超静定结构在工程实践中都有广泛的应用。
静定结构常常用于桥梁、楼房等普通建筑结构的设计与分析中,因其计算相对简单,容易掌握。
而超静定结构常常用于大跨度的特殊结构的设计与分析中,如悬索桥、曲线梁等。
虽然超静定结构计算较为复杂,但可以提供更多的设计自由度和结构优化的可能性。
总而言之,静定结构和超静定结构都是结构力学中的重要概念。
静定结构是可通过静力平衡方程求解出内部参数的结构,而超静定结构则需要额外的变形理论和力法求解。
静定结构和超静定结构

第十章静定结构和超静定结构课题:第一节结构的计算简图[教学目标]一、知识目标:1、理解结构计算简图的作用和意义。
2、掌握结构计算简图基本的简化方法。
二、能力目标:通过对结构计算简图的讲解,提高学生分析问题的能力。
三、素质目标:培养学生善于区分事物的主要矛盾和次要矛盾[教学重点]1、支座的简化和节点的简化。
2、计算简图的概念和要求。
[难点分析]计算简图简化的原理。
[学生分析]学生由于缺乏实际工程知识,不太理解计算简图的作用以及这种分析方法。
[辅助教学手段]理论联系实际、分析、讨论的方法[课时安排]1课时[教学内容]一、导入新课何谓结构?结构的举例。
通过启发学生联系工程实例,理解结构的概念。
二、新课讲解1.结构的计算简图2.结构的计算简图应满足的要求(1)基本上反映结构的实际工作性能(2)计算简便3.实际结构的计算简图的简化(1)支座的简化三种形式;简支梁、阳台、柱的实例。
(2)节点的简化铰节点和刚节点的特点及其应用(3)构件的简化实际上是力学中杆件的简化(4)荷载的简化集中荷载和均布荷载三、讨论1 牛腿柱的计算简图2 雨蓬的计算简图四、小结在结构设计中,选定了结构的计算简图后,在按简图计算的同时,还必须采取相应的措施,以保证实际结构的受力和变形特点与计算简图相符。
五、作业思考题:1课题:第二节平面结构的几何组成分析[教学目标]一、知识目标:1、理解几何组成分析的作用和意义。
2、了解结构从几何组成的观点的分类。
3、了解结构几何组成分析的规则和方法。
4、了解静定结构和超静定结构的概念。
5、会对简单结构进行几何组成分析。
二、能力目标:通过对结构几何组成分析的讲解,提高学生分析问题的能力。
三、质目标:培养学生善于区分事物的主要矛盾和次要矛盾[教学重点]1、几何组成分析的意义和结果。
2、几何组成分析的方法。
[难点分析]结构几何组成分析的概念和方法都比较抽象,尤其是方法,学生学习起来比较困难。
讲解时,淡化理论,结合例题讲解。
结构力学第五章 力法
超静定结构与静定结构 在计算方面的主要区别
• 静定结构的内力只要根据静力平衡条件即 可求出,而不必考虑其它条件,即:内力是 静定的。 • 超静定结构的内力则不能单由静力平衡
条件求出,而必须同时考虑变形协调条件,即: 内力是超静定的。
求解超静定结构的计算方法
• • 从方法上讲基本有两种:力法和位移法。 从历史上讲分传统方法和现代方法。
M1 M1 M 12 l 3 (图形自乘) • EI dx EI dx 3EI 11
•
1P
4 M1MP ql dx EI 8EI
• 代入变形条件, 得: • X1= - ⊿1P/δ11= 3ql/8 (↑) • 最后弯矩图可用叠加原理(也可将X1作用在基
•⊿2P=[(ql2/2×l)×l] =ql4/2EI
(3)、解方程 (求解未知量)
• 力法方程:(可消去 l3/EI) • 4/3 X 1 -X 2 - 5ql/8 = 0 • -X1+4/3X2+ ql/2 = 0 • 解出: • X 1 =3ql/7 • X2 = - 3ql/56
1nXn+
… … nnXn+ ⊿nP = 0
• (n次超静定结构在荷载作用下的力法典型方程) • 基本未知量:n个多余未知力X1 、X2、… Xn; • 基本体系:从原结构中去掉相应的n个多余约 束后所得的静定结构; • 基本方程:n个多余约束处的n个变形条件。
力法典型方程的讨论:
• (1)、可写成矩阵形式: 11 12 1n X 1 1P 0 • 22 2 n X 2 2 P 0 21 n1 n 2 nn X N nP 0 • [δ ]{X} + {⊿P } = {0} • [δ ]——系数矩阵、柔度矩阵 • (2)、力法方程主系数: δ ii≠0,恒为正 . • 因为δ ii是Xi=1作用在自身方向上,所产 生的位移系数,所以不为零,恒为正。
静定超静定判断及计算

目的和意义
目的
理解静定与超静定的概念,掌握判断方法,能够进行相应的计算。
意义
在实际工程中,正确判断结构和系统的静定或超静定状态对于确保结构安全、节约材料和降低成本具有重要意义。
02
静定与超静定的基本概念
静定结构的定义
静定结构
在任何外界影响下,其平衡位置都是稳定的 ,且在受到微小扰动后能自动恢复到原来的 平衡状态。
内力计算的方法
静定结构的内力计算通常采用截面法或节点法进行。截面法是通过 截取结构的一部分进行分析,节点法则是对结构的节点进行受力分 析。
内力的表示方法
内力可以用实线和虚线表示,实线表示实际受力方向,虚线表示实际 受力反方向。
静定结构的位移计算
1
位移计算的意义
在结构分析中,位移是一个重要的参数 。通过计算位移,可以了解结构的变形 情况,从而评估结构的稳定性和安全性 。
本文的研究成果已被广泛应用于建筑、机械、航空航天等工程领 域,解决了众多实际工程问题,取得了显著的经济和社会效益。
对未来研究的展望
深入研究复杂结构体系
随着科技的发展,复杂结构体系在工程中越来越常见,未 来研究可进一步探讨复杂结构体系的静定与超静定问题, 提高工程结构的稳定性和安全性。
引入先进计算技术
计算公式
自由度数 = 刚片数 - 约束数。
判断标准
若自由度数等于0,则结构为静定;若自由度数不等于0,则结 构为超静定。
几何法判断
定义
几何法判断是指通过分析结构的几何形状来判断结构是否为静定或超静定的一种方法。
判断标准
若结构的几何形状满足静定结构的条件(即所有刚片都是相互平行的),则结构为静定;否则为超静 定。
01
超静定结构

l
A
B
l
q
D
2 )建立正则方程 1 (δ 11 + ) X 1 + ∆1P = 0 C
3 )求解 2 1 2 2l 3 δ11 = ( × l × l × × l) = EI 2 3 3EI 1 1 ql 2 2l 1 ql 2 3l ∆ 1P = − ( ×l × × + ×l × × ) EI 2 2 3 3 2 4 ∆ 1P 7 ql 4 7 ql =− X1 = − = (↑ ) 1 24 EI 24 δ11 + C 2 )据平衡条件,求得
ql 2 M C = M × X1 = 7
0 C
q
A
ql 2 7
X1
MP
ql 2 2
M
5ql 2 14
M A = M × X 1 − M PA
0 A
5 ql 2 =− 14
例14 − 2 − 4 画图示刚架的内力图。
q
D
q
C
X2
解:利用对称性,从CD中间
X1
EI
D K
剖开,由于结构对称,载荷 对称,故只有对称内力, 所以,X 3 = 0。
δ11
求得 X 1 后,则可解出相当系统所有内力、位移,此相当系统的解 即为原系统的解。
三、n次静不定的正则方程
可将上述思想推广到n次静不定系统,如解除n个多余约束后的未知多余 约束力为 X j ( j = 1,2,..., n ) 它们将引起 X i 作用点的相应的位移为 ∑ ∆ ij ,而原系统由 x j ( j = 1, K n) j =1 与外载荷共同作用对此位移限制为零(或已知),故有
P A C D n O B P (b) P A
超静定结构的概述
(a)
(b)
图 11-3
除上述主要特征外,超静定结构还具有整体性强、变形小、受力较为 均匀等特点,因而这种结构在实际工程中被广泛采用。例如,图11-4a 所 示的两跨连续梁较图11-4b 所示的两跨简支梁,在力 F 作用点处的弯矩和 挠度均为小。
(a) 静定结构
(b) 超静定结构
(c) 静定结构受力图
算上来说,静定结构的静力特征是用静力平衡条件就能求得全 部反力和内力;而超静定结构的静力特征是仅用静力平衡条件不能求得 全部反力和内力。例如,对图11-1a 所示的静定梁,其受力图如图11-1c 所示,梁的反力(FAx、FAy、FB)和内力(FN、FQ、M)分别由三个静 力平衡方程求得。 而对图 11-lb 所示的连续梁,其受力图如图 11-ld 所示, 梁的反力共有四个(FAx、FAy、Fx1、FB),其中Fx1称为多余约束所对应 的多余未知力,用三个静力平衡方程不可能将此四个反力全部求得,只 要有一个反力尚未确定,梁的内力就不能确定。因此,还须补充其他条 件,才能求解。
【例11-3】确定图11-13a 所示结构的超静定次数。
解:图11-13a 所示刚架,具有一个多余约束。若将横梁某处改为铰接, 即相当于去掉一个约束,得到如图11-13b 所示的静定结构,故原结构 n = l。
若去掉支座 B 处的水平支杆,则得图11-13c 所示的静定结构。 但是,若去掉支座 B 或支座 A 的竖向支杆,即成可变体系如图11-13d 所 示,显然这是不允许的,所以此刚架支座处的竖向支杆不能作为多余约束。
图 11-6
② 去掉一个单铰,相当于去掉两个约束 。 如图11-7a 所示的结构,去掉一个单铰而变成静定结构,如图11-7b 所示。 因 n = 2,故该结构为两次超静定 。
超静定问题——精选推荐
西南交通大学应用力学与工程系材料力学教研室第八章简单的超静定问题§8-1 概述静定结构: 仅靠静力平衡方程就可以求出结构的全部未知的约束反力或内力FAB2A F1BααC平面任意力系:3个平衡方程平面共点力系:2个平衡方程独立平衡方程数:超静定结构(静不定结构): 仅凭静力学平衡方程不能求解全部未知内力或反力的结构。
超静定结构的未知力的数目多于独立的平衡方程的数目;两者的差值称为超静定的次数。
BD C A 132FααF F CF B F A BC ABCADA FααF N1y xF N3F N2BD C A 132FααF F CF B F A BC AA FααF N1y xF N3F N2•习惯上把维持物体平衡并非必需的约束称为多余约束,相应的约束反力称为多余未知力。
•超静定的次数就等于多余约束或多余未知力的数目。
•注意:从提高结构的强度和刚度的角度来说,多余约束往往是必需的,并不是多余的。
超静定的求解:根据静力学平衡条件确定结构的超静定次数,列出独立的平衡方程;然后根据几何、物理关系列出需要的补充方程;则可求解超静定问题。
F F CF B F A BC A•补充方程的数目=多余未知力的数目=多余约束数。
•根据变形几何相容条件,建立变形几何相容方程,结合物理关系(胡克定律),则可列出需要的力的补充方程。
•补充方程的获得,体现了超静定问题的求解技巧与关键。
此处我们将以轴向拉压、扭转、弯曲的超静定问题进行说明。
BD C A 132FααF F CF B F A BC AA FααF N1yxF N3F N2§8.2 拉压超静定问题1拉压超静定问题解法例两端固定的等直杆AB ,在C 处承受轴向力F 如图,杆的拉压刚度为EA ,求杆的支反力.解:一次超静定问题=−+F F F B A F BA F AB ablFC (1) 由节点A 的平衡条件列出杆轴线方向的平衡方程(2)变形:补充方程(变形协调条件)可选取固定端B 为多余约束,予以解除,在该处的施加对应的约束反力F B ,得到一个作用有原荷载和多余未知力的静定结构--称为原超静定结构的基本静定系或相当系统注意原超静定结构的 B 端约束情况,相当系统要保持和原结构相等,则相当系统在B 点的位移为零。
1、静定结构与超静定结构静力计算公式(总结)
静定结构与超静定结构静力常用计算公式一、短柱、长柱压应力极限荷载计算公式1、短柱压应力计算公式荷载作用点轴方向荷载AF =σ bhF =σ 偏心荷载)1(21xY i ye A F W M A F -=-=σ )1(22xY i ye A F W M A F +=+=σ )61(2,1hebh F ±=σ 偏心荷载)1(22xy y x xx y Y i ye i xe A FI xM I x M A F ±±=⨯±⨯±=σ )661(beh ebh F yx ±±=σ长短柱分界点如何界定?2、长柱方程式及极限荷载计算公式 支座形式图 示方 程 式极限荷载 一般式 n=1两端铰支 β=1y a dxy d ∙=222 ax B ax A y sin cos +=y F M EIFa ∙==,2 EI ln 222π EI l 22π一端自由他端固定β=2y a dxyd ∙=222 ax B ax A y sin cos +=EI l n 2224)12(π-EI l 224πy F M EIFa ∙==,2 两端固定 β=0.50)(22=-+F M y a dxyd A FM ax B ax A y A++=sin cos A M y F M EIFa +∙-==,2 EI l 224π EI l 224π 一端铰支他端固定 β=0.75)(222x l EI Q y a dx y d -=∙+)(sin cos x l FQax B ax A y -++=水平荷载-=Q EIFa ,2 ——EI l227778.1π注:压杆稳定临界承载能力计算公式:EI l P cr 22)(βπ=二、单跨梁的反力、剪力、弯矩、挠度计算公式 1、简支梁的反力、剪力、弯矩、挠度计算公式荷载形式M 图V 图反力 2F R R B A == L Fb R A =L Fa R B =2qL R R B A == 4qL R R B A == 剪力V A =R A V B =-R B V A =R A V B =-R B V A =R A V B =-R BV A =R A V B =-R B弯矩4max FL M =LFabM =max 82maxqL M = 122maxqL M = 挠度EIFL 483max=ω 若a >b 时,3)2(932maxab a EIL Fb +=ω(在)2(3b a ax +=处) EIqL 84max=ω EIqL 1204max=ω 注:1、弯矩符号以梁截面下翼缘手拉为正(+),反之为负(—)。
《工程力学》超静定结构.
试求悬臂梁AD在D点的挠度。
A
D
F
B
C
E
(1)、判定超静定次数 一次内力超静定问题。
A
D
F
B
C
E
(2)、确定多余约束 以CD杆的轴力为多余约束力;
(3)、去掉多余约束代之以反力 ,得到相当系统。
A
D
FN
FN
FN
F
B
C
FN
E
(4)、设两梁的挠度以向下为正,则变形协调方程为
2KN
2KN
0.5m
2、GH平行于EF,并且GH、EF垂直于圆轴的轴线。 圆轴、GH、EF处于水平。已知:圆轴的直径为D1 =100毫米,GH、EF的直径为D2=20毫米,材料 相同。G=0.4E,M=7KNm。求轴内的最大剪应 力。
M
2m
H
1m
1m G
E
2m F
3、直角拐ABC的直径为D=20毫米,CD杆的横截面 面积为A=6.5㎜2,二者采用同种材料制成。弹性 模量E=200GPa,剪变模量G=80 GPa。CD杆 的线胀系数α=12.5×10-6,温度下降50º。求出直 角拐的危险点的应力状态。
A 0.6m
B 0.3m
C
D
4、图示中梁为工字型截面,梁的跨度为L=4米, 力P=40KN作用在梁的中央。对本身形心轴的惯性 矩为IZ=18.5×106mm4,求该梁的最大剪力和弯矩, 并求C截面的挠度。
P
90 C
5、图示中的钢制直角曲拐ABC的截面为圆型,直径为d=100
毫米,位于水平面内,A端固定,C处铰接钢制直杆CD。已
q
a
a
7、悬臂梁的抗弯刚度为EI,长为2a,用二根长均为 a的拉杆BC、CD支撑。已知拉杆的抗拉压刚度相 等同为EA。求C点的铅垂挠度。