基于北斗卫星导航技术的惯性导航系统误差估计方法
卫星导航系统的定位误差分析方法

卫星导航系统的定位误差分析方法导航定位是现代科技中的一项重要技术,卫星导航系统是其中最常用和最准确的一种方法。
然而,由于各种因素的影响,导航定位结果不可避免地会存在一定的误差。
因此,对卫星导航系统的定位误差进行准确的分析和评估,对于了解其性能和改进算法具有重要意义。
卫星导航系统的定位误差来源于多个方面,主要包括卫星、接收机、大气层、地球自转等因素。
针对不同的误差来源,有不同的分析方法和修正技术。
首先,卫星导航系统的定位误差源于卫星的位置不确定性。
卫星的位置误差是导致定位误差的主要因素之一。
因此,在定位误差分析中,需要考虑卫星轨道的误差、钟差的误差以及卫星运动引起的各项误差。
针对这些误差,各个导航系统会采用不同的修正算法,如差分定位、精密星历、卫星轨道的插值等。
这些算法可以有效地降低卫星位置误差,从而提高导航定位的准确性。
其次,接收机本身的误差也会对导航定位结果产生影响。
接收机的硬件设计和信号处理算法的不同,可能导致接收机定位误差的差异。
为了准确评估接收机的定位误差,需要进行接收机性能测试和精度分析。
这可以通过与参考点的比较测试、信号质量分析、多路径误差补偿等方法来实现。
通过对接收机的性能进行评估,可以进一步明确接收机的误差来源,并采取相应的措施进行修正。
此外,大气层的影响也是导航定位误差的一个重要来源。
大气层会对无线电波信号的传播速度和路径产生影响,从而引入定位误差。
针对这一问题,可以通过多普勒频率的变化、电离层延迟等效应进行修正。
此外,大气层中的水汽含量、温度和空气密度等因素也会对导航定位结果产生影响。
因此,在定位误差分析中,需要考虑大气层的变化和模型,以便更准确地估计定位误差。
最后,地球自转也会对卫星导航系统的定位误差产生影响。
地球的自转会不断改变接收机所处的观测点的位置,从而导致起伏、切线偏差等误差。
为了准确分析定位误差,需要考虑地球自转对导航系统的影响,并进行相应的修正。
通常,通过使用地球模型、对卫星轨道和速度进行预测,可以对定位误差进行有效地补偿。
导航工程技术专业实操惯性导航系统的误差分析与校正方法探究
导航工程技术专业实操惯性导航系统的误差分析与校正方法探究导航工程技术专业实操:惯性导航系统的误差分析与校正方法探究随着现代导航技术的快速发展和广泛应用,惯性导航系统在航空、航海、地面车辆等领域中扮演着重要的角色。
然而,由于各种原因,惯性导航系统在实际应用中难免会产生一定的误差,因此,学习误差分析与校正方法成为导航工程技术专业的必修内容。
本文将对惯性导航系统的误差来源、误差分析方法以及误差校正方法进行探究和总结。
一、误差来源分析惯性导航系统的误差来源复杂多样,主要包括器件固有误差、测量误差和环境误差等。
器件固有误差主要指惯性测量单元(IMU)中的陀螺仪零偏、比例因素误差以及加速度计安装误差等。
测量误差包括各类传感器的随机误差和系统偏差,例如传感器的量程不确定性和非线性等。
环境误差主要指温度变化、振动和加速度的不均匀性等对导航系统性能产生的影响。
二、误差分析方法为了准确地分析惯性导航系统的误差,工程技术人员通常采用以下两种方法:定态误差分析和动态误差分析。
1. 定态误差分析定态误差分析方法主要通过在不同工作状态下对系统进行测试,统计并分析其误差特性。
具体步骤如下:首先,对系统进行静态校准,获取系统在各参数状态下的误差特性曲线;其次,根据实测数据,利用统计学方法对误差进行分析,包括误差均值、标准差等参数的计算;最后,通过建立数学模型,对定态误差进行综合分析,找出误差随参数变化的规律。
2. 动态误差分析动态误差分析方法主要通过对系统在不同运动条件下的实测数据进行分析,确定误差的变化规律和影响因素。
具体步骤如下:首先,选择不同运动模型,例如匀速、加速度等,设计实验方案并采集数据;其次,通过数据处理方法,对误差进行分析和提取,包括误差漂移速率、相关性等参数的计算;最后,根据误差分析结果,优化系统设计和算法,减小误差对导航精度的影响。
三、误差校正方法误差校正是提高惯性导航系统精度的关键环节,校正方法的选择和优化对于系统的性能至关重要。
卫星导航系统的误差分析及其纠正方法

卫星导航系统的误差分析及其纠正方法卫星导航系统是现代化的导航方式之一,已成为人们旅行、航空、海洋、地质勘探等领域中必不可少的工具之一。
但是,由于各种外在因素的影响,卫星导航系统的精度不可避免地会受到误差的干扰,从而影响到实际使用效果。
因此,本文将针对卫星导航系统的误差分析及其纠正方法进行探讨。
误差来源卫星导航系统的误差来源主要有以下几种:1.天气因素:天气条件的变化,如雷暴、降雨等,会对信号传输造成干扰,导致误差出现。
2.电离层:电离层会对信号产生折射、延迟等影响,从而影响卫星导航系统的精度。
3.卫星轨道误差:卫星轨道的非理想性和不稳定性会使得卫星发射的信号的时间和位置出现误差。
4.接收机性能问题:接收机的性能问题也会影响卫星导航系统的精度。
接收机信噪比的大小,接收机灵敏度等问题都可能产生误差。
误差分析为了消除误差对卫星导航系统的影响,需要对误差进行分析。
对于卫星导航系统而言,误差分析主要分为两个方面:一是对误差进行分析,二是根据误差分析结果采取相应的纠正措施。
误差分析的第一步就是对误差进行排查。
根据误差来源的不同,采用不同的方法进行分析。
对于电离层误差,可以利用多路径组合技术进行处理。
对于卫星轨道误差,可以利用多源数据融合方法进行处理。
对于接收机性能问题,可以采用时差差分技术或载波相位差分技术进行处理。
误差纠正误差纠正方法可以大致分为两类。
一类是通过信息处理技术对误差进行纠正,例如利用多路径组合技术降低电离层误差、利用多源数据融合方法降低卫星轨道误差等。
另一类是通过通信技术对误差进行纠正,例如利用差分定位技术对接收机性能问题进行纠正。
差分定位技术是最为常见的一种误差纠正技术。
它可以通过在同一时刻同时接收多个卫星信号,然后将它们之间的差异作为误差的补偿,从而提高卫星导航系统的定位精度。
差分定位技术的准确性取决于差分基线的长度和稳定性。
如果差分基线长度较短,误差的补偿也相对较小。
但如果差分基线长度过长,则信号会受到多路径影响,从而导致误差更大。
一种基于GPS信息的惯性导航系统测量误差修正方法[发明专利]
![一种基于GPS信息的惯性导航系统测量误差修正方法[发明专利]](https://img.taocdn.com/s3/m/cc6d06f6a76e58fafbb00378.png)
专利名称:一种基于GPS信息的惯性导航系统测量误差修正方法
专利类型:发明专利
发明人:魏宗康,刘生炳,赵龙
申请号:CN201310403697.2
申请日:20130906
公开号:CN103471593A
公开日:
20131225
专利内容由知识产权出版社提供
摘要:本发明公开了一种基于GPS信息的惯性导航系统测量误差修正方法,本发明提出采用串联控制的方法,引入外部GPS位置信息、速度信息以对惯性导航误差进行修正,通过设计合适的控制器即可完成对输入信号噪声的滤除,完成系统输出对系统输入的跟踪,即完成对惯导系统速度和位置误差的修正,该方法不依赖于系统误差模型的精确性,运算速度快,时间开销短,当外测数据频率较高时也可完成对惯导系统速度和位置测量误差的修正,只需通过修改控制器参数即可重新建立系统的误差模型,工作量小。
申请人:北京航天控制仪器研究所
地址:100854 北京市海淀区北京142信箱403分箱
国籍:CN
代理机构:中国航天科技专利中心
代理人:臧春喜
更多信息请下载全文后查看。
卫星导航系统中的误差分析与校正

卫星导航系统中的误差分析与校正随着人类社会的不断发展,卫星导航系统逐渐成为我们日常生活中不可或缺的一部分。
无论是手机定位、车载导航还是航空航天等领域,卫星导航系统都扮演着至关重要的角色。
然而,在现实应用过程中,卫星导航系统常常存在着一些误差,从而影响定位的准确性和精度。
本文将就卫星导航系统中的误差分析与校正进行深入探究。
误差的来源与类型卫星导航系统的误差可以来自于多个方面,主要包括:信号传输误差、接收机硬件误差、大气层影响误差、卫星轨道误差等。
信号传输误差:由于电磁波在传输过程中会受到多个因素的影响,如大气湍流、散射、多径效应等,从而导致信号的时间和相位误差。
这类误差是导航系统中最常见也最主要的误差来源。
接收机硬件误差:接收机中的硬件设备蕴含着很多潜在误差。
例如:芯片震荡频率不准、模拟电路的噪音产生等。
大气层影响误差:由于大气层对卫星信号产生折射和散射等影响,在信号传输过程中受到大气影响的卫星信号时间和相位误差情况会发生较大的变化。
卫星轨道误差:由于卫星在轨道运行过程中存在多种因素的影响,如万有引力、地球潮汐、空气摩擦等,导致轨道存在差异,从而影响卫星信号传输。
卫星导航系统中的误差大致可以分为如下几类:几何误差、时间误差、频率误差、信号传输误差、大气影响误差、硬件误差等。
其中,几何误差和时间误差在卫星导航系统中占有较大的比重。
误差的影响卫星导航系统中的误差会对定位信息的准确性和精度产生巨大的影响。
对于高精度定位,如航空导航等,误差的影响更为重要。
因此,对于误差的定量分析和校正显得尤为必要。
误差的校正与影响针对卫星导航系统中的误差,我们可以采用多种方法进行校正。
其中,最经典的方法是差分定位方法。
差分定位方法可以有效消除信号传输误差,通过多个基站同时观测一个目标进行比较,以获取更加精确的位置信息。
此外,误差的校正还可以采用多路径抗干扰、卡尔曼滤波等方法。
多路径抗干扰主要是通过信号处理技术进行多路径信号干扰的消除,从而减小因信号散射而产生的误差。
卫星导航系统误差修正算法研究
卫星导航系统误差修正算法研究卫星导航系统是一种基于人造卫星的定位和导航系统,它已经成为现代社会中不可或缺的一部分。
然而,由于多种原因,卫星导航系统在使用过程中会存在一定的精度误差。
因此,研究和开发有效的误差修正算法是提高卫星导航系统精度和可靠性的重要工作。
在卫星导航系统中,误差来源主要包括卫星轨道误差、电离层延迟、大气延迟、多路径效应等。
这些误差因素会导致导航系统在定位和导航过程中产生偏差。
为了解决这些问题,研究人员提出了多种误差修正算法。
首先,卫星轨道误差是导航系统中最主要的误差源之一。
轨道误差通常是由于卫星的引力、大气摩擦和其他外部影响因素引起的。
为了修正轨道误差,导航系统会使用从地面测量得到的卫星轨道信息进行数据校正。
此外,还可以使用卫星时钟校准方法来减小轨道误差对定位精度的影响。
其次,电离层延迟和大气延迟是导航系统中另一个重要的误差来源。
电离层是地球大气层中的一部分,其对导航信号的传播产生干扰。
为了减小电离层延迟带来的误差,可以使用双频技术来进行误差校正。
双频技术利用不同频率的导航信号之间的差异来估计电离层延迟,并对导航信号进行修正。
而大气延迟主要是由于地球大气中的水汽、氧气等因素对导航信号的传播引起的。
为了解决这个问题,导航系统可以使用气象数据和大气模型来估计大气延迟,并对定位结果进行相应的修正。
此外,还可以利用地基站观测和卫星观测数据的差别来减小大气延迟误差。
另外,多路径效应是导航系统中常见的误差源之一。
多路径效应是指导航信号在传播过程中遇到障碍物而产生反射和绕射,从而导致信号多次到达接收机。
为了降低多路径效应对定位精度的影响,可以使用接收机天线设计和信号处理算法来减小反射信号的影响。
除了上述误差源外,还存在其他一些复杂的误差来源,如钟差、协同误差等。
针对这些误差,研究人员提出了一系列的修正算法,如差分GNSS技术、卡尔曼滤波算法等。
这些算法通过对多个接收机观测数据的加权处理和融合,可以达到更高的定位精度。
北斗卫星导航系统精度评估方法研究
北斗卫星导航系统精度评估方法研究北斗卫星导航系统(简称北斗系统)是中国自主研发的卫星导航系统,它能够在全球范围内提供定位、导航和授时服务。
自北斗系统建设以来,广泛应用于交通、水利、气象、农业、渔业、林业、测绘、地质勘探、电力、通信、金融等领域。
为了保证北斗系统的导航精度,需要对其进行精度评估。
一、北斗系统的导航精度北斗系统的导航精度取决于卫星的几何因素、时钟误差、大气延迟、多径效应等因素。
其中,最主要的因素是卫星的几何因素。
由于卫星的位置不断变化,导致导航精度也不断变化。
因此,北斗系统需要不定期对其进行精度评估和校正,以保证其导航精度。
二、北斗系统的精度评估方法1、与基准站进行实时比对方法这种方法是指通过与已知位置的基准站实时比对卫星信号,从而进行误差估计。
这种方法虽然实时性强,但是需要基准站的配合,且成本较高。
2、单点定位方法单点定位是一种通过卫星的伪距观测值,推导出接收机的三维空间坐标的方法。
该方法适用于无需知晓精确位置的应用场景。
然而,由于单点定位容易受到多种误差因素的影响,精度较低,仅适用于某些精度要求不高的应用场景。
3、差分定位方法差分定位是指通过一个基准站观测卫星信号,并与其他接收机的观测值进行比较,从而估计定位误差。
该方法的优点在于可以通过对比不同基准站的数据,来减少大气误差和钟差误差的影响。
它适用于一些对精度要求较高的应用场景,如航空、导航等领域。
4、测量工程方法测量工程方法是通过在一定范围内,建立测量网络并对接收机进行实地观测的方法。
该方法能够产生较准确的位置信息,但需要较大的场地和昂贵的设备。
三、北斗系统精度评估的应用实例北斗系统的精度评估可以通过一系列的实验来进行。
例如,可以通过安装北斗芯片的移动设备,在不同场景下比对和验证其位置信息的准确度。
同时,数字化地图的建立也可以借助北斗系统进行,通过对比实测结果和地图信息的差异,评估北斗系统的导航精度。
此外,还可以在农业、气象等领域使用北斗系统进行应用实例测试,例如,在农业领域,可以通过北斗系统的精度评估,提高精准农业、土地评估等方面的应用。
北斗卫星导航系统误差分析与评估
北斗卫星导航系统误差分析与评估作者:文/ 陈恺来源:《时代汽车》 2020年第19期陈恺江苏无线电厂有限公司江苏省南京市 210012摘?要:北斗卫星导航系统误差还包括卫星误差,以及信号传输的过程中产生的误差、用户接收端的误差,这些误差因素造成卫星导航系统在使用的过程中,无法及时完成定位、完成警告,在警报数值方面存在明显的误差,甚至还会因为定位无法使用,导致出现更多故障。
卫星导航系统出现的各种故障都能够被测量,最终通过是卫星导航系统的运用体现出来,造成使用方面的故障。
关键词:北斗卫星导航系统误差评估Error Analysis and Evaluation of Beidou Satellite Navigation SystemChen KaiAbstract:Beidou satellite navigation system errors include satellite errors, errors generated in the process of signal transmission, and user receiving errors. These error factors cause the satellite navigation system to be unable to complete positioning and complete warnings in time during the process of use. There are obvious errors in numerical values, and even more failures may occur due to unavailability of positioning. Various malfunctions of the satellite navigation system can be measured, and finally reflected through the use of the satellite navigation system, causing malfunctions in use.Key words:Beidou satellite, navigation system, error, evaluation航空领域和科研领域内,对相关设备使用的安全性需求比较高,比如航空领域,航空的安全性和卫星导航系统有直接关系。
卫星导航定位解算与误差处理方法资料课件
02
卫星导航定位系统通过接收卫星信号,利用信号传播时间、频率等参数,计算 出卫星至地面接收机的距离,再结合卫星轨道参数,最终确定地面接收机的位 置和速度。
03
卫星导航定位系统通常采用三角测量法来确定地面物体的位置,即通过比较接 收到的卫星信号与卫星轨道参数,计算出接收机至多颗卫星的距离差,再利用 几何学原理确定接收机的位置。
卫星轨道误差
由于卫星轨道不准确引起的定位误差。处理方法包括利用星历数据中的轨道参数进行修正,以及利用实时监测的 卫星轨道数据进行修正。
卫星钟差
由于卫星时钟与标准时间不同步引起的定位误差。处理方法包括利用差分技术进行卫星钟差估计和修正,以及利 用已知的控制点进行卫星钟差校准。
卫星导航定位数据
04
处理软件介绍
接收机钟差
由于接收机时钟与卫星时钟不同步,导致定位误差。处理方法包括利用差分技 术进行接收机钟差估计和修正,以及利用卫星钟信号进行接收机钟差修正。
接收机位置误差
由于接收机位置不准确引起的定位误差。处理方法包括利用差分技术进行接收 机位置修正,以及利用已知的控制点进行接收机位置校准。
卫星轨道误差处理
时间同步与时间传递
01
02
03
时间同步
利用卫星导航系统提供的 精确时间信息,将接收机 的时间与卫星时间同步。
时间传递
利用卫星信号传递时间信 息,实现接收机之间的时 间同步。
时间偏差修正
根据时间同步结果,修正 接收机时间传递过程中的 时间偏差,提高时间同步 精度。
卫星导航定位误差
03
处理方法
卫星信号传播误差处理
卫星导航定位系统的组成
01
卫星导航定位系统主要由空间段、控 制段和用户段三部分组成。空间段包 括多颗卫星,负责发送导航信号;控 制段包括地面监测站和主控站,负责 监测卫星轨道和信号质量,修正卫星 轨道参数和信号误差;用户段包括各 种卫星导航定位接收机,用于接收卫 星信号并计算位置、速度等信息。
导航工程技术专业实操惯性导航系统的误差分析与校正
导航工程技术专业实操惯性导航系统的误差分析与校正导航工程技术专业涉及到许多重要的导航系统,其中之一就是惯性导航系统。
惯性导航系统是一种可以独立运行的导航系统,通过测量和计算物体的加速度和角速度来确定位置和方向。
然而,惯性导航系统存在着一定的误差,这些误差需要进行分析和校正,以确保导航的准确性和可靠性。
一、误差来源与分类惯性导航系统的误差主要来自于两个方面:传感器误差和初始值误差。
传感器误差是由于惯性传感器本身的不完美性能引起的,包括随机误差和系统误差。
随机误差是在测量中出现的偶然误差,一般可通过多次测量求平均值来减小;系统误差是固定的、与物理因素相关的常数误差,一般可通过校正来减小。
初始值误差是由于系统初始状态的不准确引起的,包括位置误差和姿态误差。
二、误差分析1.传感器误差分析传感器误差是惯性导航系统中最主要的误差来源之一。
对于加速度计和陀螺仪这两种常用的传感器,需要对其误差进行分析和研究。
加速度计的误差主要包括刻度因子误差、偏置误差和温度误差等。
陀螺仪的误差主要包括零偏误差、刻度因子误差和温度误差等。
通过实验和数据处理,可以确定传感器误差的大小和特征,并为后续的误差校正提供依据。
2.初始值误差分析初始值误差是惯性导航系统中由于初始状态不准确引起的误差。
对于位置误差,可以通过其他导航系统的辅助定位来进行校正。
例如,可以利用全球定位系统(GPS)提供的位置信息来校正初始位置误差。
对于姿态误差,可以利用陀螺仪提供的角速度测量值来进行校正。
通过比较惯性导航系统的测量结果与辅助定位系统的结果,可以计算出初始值误差,并进行修正。
三、误差校正方法误差校正是惯性导航系统中非常重要的一步,它可以通过多种方法来实现。
常用的误差校正方法包括零偏校正、温度校正、刻度因子校正等。
零偏校正是通过对传感器的输出进行标定,确定其零偏值,并在测量中进行相应的修正。
温度校正是通过对传感器输出的温度特性进行建模,校正温度引起的误差。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
φe = φn = 2′ , φu = 5′ ,∇ e =∇ n = (1 × 10−5 ) g , δ ϕ 0 = δ λ0 = 0.05′′ , δ Ve = δ Vn = 0.1 m/s , ε e = ε n = ε u =
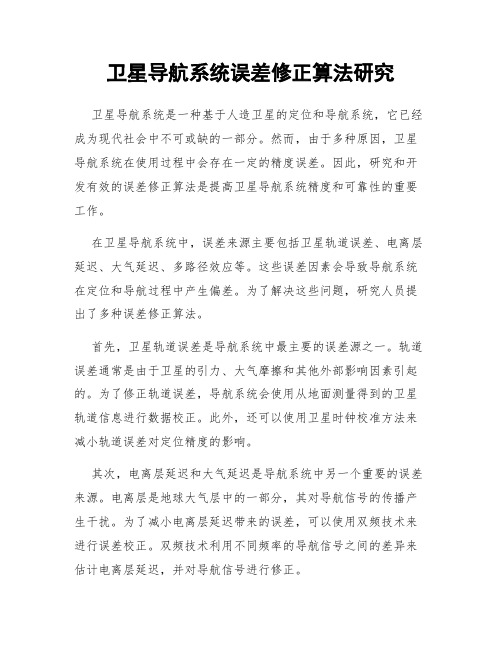
2 2 INS 系统噪声方差 (QINS) 为:δ ∇ = δ∇ = (1 × 10−5 g ) 2 ,δ ε2e = δ ε2n = δ ε2u = (5 × 10 −4 (°) /h) 2 ; (1 × 10−3 ) (°) /h ; e n 2 2 北斗系统量测噪声方差为 δ ϕ = δλ = (30 m) 2 。得到仿真曲线如图 1 所示。 G G
Estimation of INS Error Based on Beidou Satellite Navigation
WANG Zhan-jun, ZHU Tao, XU Jiang-ning ( Dept. of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China)
T [4]
表 1 不同外部观测量下惯导系统误差状态能测数量 观测量数量 2 2 4 5 6 7 外部观测量种类 位置 速度 位置速度 航向位置速度 航向纵摇位置速度 姿态位置速度 能观状态数量 7 7 9 10 11 12
λi 越大,其特征向量所对应的状态向量或状态向量的线性组合不可观测。惯导系统状态变量可选为:
40
⎡ 0 ⎢ ⎢ ⎢ Ve sec( L) tan( L) ⎢ RN ⎢ ⎢ V V sec2 ( L) ⎢ 2ωieVn cos( L) + e n RN ⎢ ⎢ 2 2 ⎢ −2ω V cos( L) − Ve sec ( L) ie e ⎢ RN ⎢ ⎢ 0 =⎢ ⎢ ⎢ −ωie sin( L) ⎢ ⎢ ⎢ 2 ⎢ −ωie cos( L) + Ve sec ( L) ⎢ RN ⎢ 0 ⎢ ⎢ 0 ⎢ 0 ⎢ ⎢ 0 ⎢ ⎢ 0 ⎣ 0 0 0 0 sec( L) RN Vn tan( L) RN 1 RM 0 2ωie sin( L) + 0 − 1 RM 0 0 0 0 0 0 0
XINS = [δ L δλ δve δvn φe φn φu ∇e ∇n εe εn εu ] ;分别为惯导系统输出的纬度误差、经度误差、东向速
T
度误差、北向速度误差、平台的东向失准角、北向失准角、方位失准角,东向和北向加速度计零偏和东、 北和方位陀螺仪漂移,即系统误差状态为 12 个。表 1 为采取不同外部导航信息观测量的能测性计算结 果。可以得出结论:增加观测量的数量可以提高 INS 系统误差状态的可观测性。 2 基于北斗导航定位信息的惯性导航系统的误差修正能力分析 我军北斗导航定位系统基于三颗同步卫星,实现作用区域用户的导航定位功能。根据实际试验,当 前普通军用北斗导航系统接收机可以提供定位精度 40 m(CEP) ,数据刷新率 1 Hz;作为我军独立自主 研发的导航系统,其使用的安全性和可靠性均高于目前广泛使用的 GPS。在此根据当前北斗的试验结果 及相关性能,对系统进行相关的仿真,研究采取北斗信息对惯性导航系统误差修正的效能分析。 2.1 惯性导航系统系统误差模型 系统误差模型选取半解析式当地水平指北平台式惯导系统,东北天坐标系[5]。系统状态变量选为 XINS,惯导系统的误差状态方程如下所示:
收稿日期:2004-12-07 作者简介:王战军(1972—) ,男,工程师,硕士研究生在读,从事惯性技术及组合导航技术研究。
第1期
王战军等; 基于北斗卫星航技术的惯性导航系统误差估计方法
39
1
基于外部观测量的惯导误差修正能力分析 惯导修正问题可以分为三种不同的情况,即初始对准状态、组合导航状态和综合校准状态。通过技
Abstract: Better positioning accuracy of navigation system promotes the warship’s maneuver capability. Inertial navigation system (INS) is the only high accuracy self-contain system that the warship can rely on at sea. However, its long-term accuracy is poor. From the system observability analysis, adding more kinds of external measurements into the inertial navigation system can enhance estimation accuracy of INS error. In order to solve the above-mentioned problem, a approach which utilizes Beidou navigation system as auxiliary systems to build a more accurate and robust integrated navigation system is studied in this paper. Simulations verify that this method is effective and can improve INS performance. Key words: inertial navigation system; Beidou navigation system; integrated navigation system; Kalman filter 0 前 言 水面舰艇和潜艇的导航定位精度影响到舰艇整体的战术技术性能。惯性导航系统(INS)是舰艇航行 时可以依赖的主要自主式导航装备,但原理上存在长时间工作的积累误差,其初始对准精度误差也将造成 系统导航精度的下降。 多年以来寻求其它导航方式作为其辅助手段建立组合导航系统的方法一直是国内外 研究的重点。卫星导航系统具有长期的稳定性和短期的误差干扰,是组合导航系统的首先配置方案[1]。 GPS/INS 是目前外军最主要的组合导航系统。由于 GPS 系统在军事应用中控制权受限,所以基于我军北 斗导航定位信息的惯性导航修正效果,对于核心问题进行了分析,相关数学仿真对这一结论给予了说明。
惯导纬度估计误差/m
时间/s 平台方位失准角估计误差/(′) 惯导东向速度估计误差/(m/s) 东向水平失准角估计误差/(″) 惯导北向速度估计误差/(m/s)
惯导经度估计误差/m
时间/s
时间/s
时间/s
时间/s
时间/s
图1
基于北斗信息修正的惯性导航系统导航参数仿真
由仿真结果可以看出,惯导纬度精度在 20 m,经度为 5 m;最大位置误差在 30 m。速度精度将优 于 0.1 m/s;姿态角精度优于 20′;故在北斗系统定位精度经纬度测量噪声 30 m,数据更新率为 1 Hz 的 条件下,2 h 仿真效果显示,可以显著改善惯导误差性能。
术手段获取载体导航信息,将这些信息与 INS 直接输出的信息比较,得到 INS 姿态角误差的观测量。通 常采取卡尔曼滤波器的方法完成惯导的修正精度。在设计卡尔曼滤波器之前,通常先进行系统的可观测 性分析,确定卡尔曼的滤波效果,因为对于可观测的状态变量,卡尔曼滤波器会收敛,能将这些状态变 量估计出来;而对于不可观测的状态变量,卡尔曼滤波器则无法观测。如仅依靠速度观测量,系统将始 终无法观测东向陀螺漂移和两个加速度计的零偏;通过外部方法将外部参考坐标系引入系统对准,始终 是解决高精度 INS 初始对准问题最为直接的手段[2]。本文为此对平台式 INS 在采取不同数量的外测量值 条件下的系统可观测性和可观测度进行了分析。 静止状态下 INS 误差模型可以近似看作线性定常 系统。 对于线性定常系统, 系统的可观测矩阵为: Q=[C CA CA2 … CAn-1]T ,通过计算可观测矩阵的秩可以 获得系统可观测状态数量[3]。根据基本可观测矩阵特 征值和特征向量的观测度,计算采取不同种类观测量 时系统的可观测度 。可观测阵 Qi(i=1,2,),则正定对 称阵 Qi Qi 单位化后的特征值λi(0≤λ≤1)为其特征向 量所对应的状态向量或状态向量线性组合的观测度。
第 13 卷第 1 期 文章编号:1005-6734(2005)01-0038-03
中国惯性技术学报
2005 年 2 月
基于北斗卫星导航技术的惯性导航系统误差估计方法
王战军,朱 涛,许江宁
(海军工程大学电气工程系,武汉 430033) 摘要:导航定位精度的提升可以提高舰艇的航行机动能力。INS 是舰艇航行时可以依赖的主要 自主式导航装备, 原理上存在的长时间积累误差决定了必须寻找有效手段加以补偿。 通过对 INS 误差可观测性分析,可以看出增加不同种类的外部导航信息观测量,将有效提高 INS 误差修正 能力。围绕这一问题,对基于北斗导航定位信息的惯性导航修正效果进行了分析,仿真说明该 方法可以较好提高 INS 性能。 关 键 词:惯性导航系统;北斗系统;组合导航;卡尔曼滤波 文献标识码:A 中图分类号:U666.1
(下转第 45 页)
第1期
张斌等: INS/双星/GPS 联邦最小二乘滤波容错结构研究
45
图 4 仿真条件 2 下的位置误差
图 5 仿真条件 2 下联邦最小二乘滤波 3 种结构的位置误差
而在联邦卡尔曼滤波和联邦最小二乘滤波中,180~210 s 时间段内的 GPS 量测信息和 240~300 s 时间段的双 星量测信息仍可被利用,组合导航系统可以有效地隔离故障,从而保证整体的滤波精度。图 5 为联邦最小二 乘滤波四种结构的滤波结果比较,其中第四种结构容错性能最好,而第一种结构容错性能最差,故略去。 4 结 论 本文采用联邦最小二乘滤波的方法对 INS/双星/GPS 组合导航系统进行信息融合技术研究,并对四 种典型联邦滤波结构的容错性能进行研究。通过仿真验证表明,INS/双星/GPS 组合导航系统中,由于双 星系统量测噪声的统计信息未知,联邦最小二乘滤波比联邦卡尔曼滤波的精度高,而且当量测信息发生 异常时,联邦最小二乘滤波的容错性能也要优于联邦卡尔曼滤波。四种联邦滤波结构中,第四种无反馈 结构的容错性能最好,是容错滤波的最优选择。 参考文献: