第二讲 机构的运动分析
理论力学机构运动分析
理论力学机构运动分析一个运动机构或运动系统是由多种运动的点 和刚体组成,各构件之间通过铰链、套筒、销钉、 滑块等联接点传递运动。
由已知运动的构件,通 过对某些联结点和刚体的运动分析,确定机构中 所有构件的运动,称为机构运动分析。
分析机构 运动时,先应分析各构件作什么运动,计算各联 结点速度和加速度,再计算待求未知量。
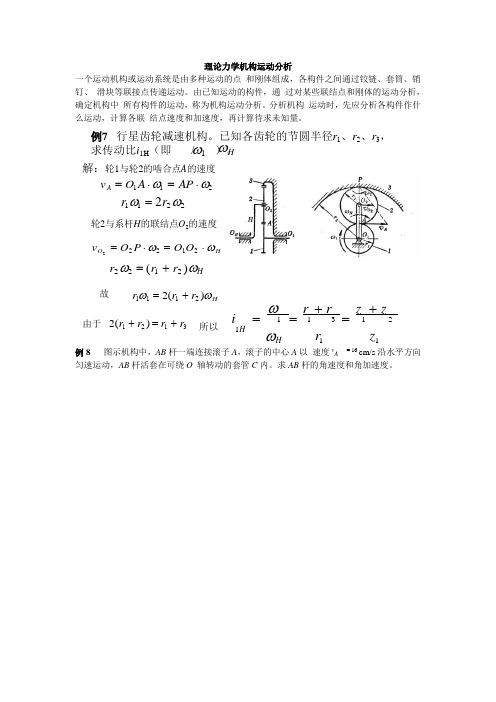
7 r 1 r 2 r 3i 1H ω/ ω H1 12 Av A =O 1A ⋅ω1=AP ⋅ω2r 1ω1=2r 2ω22 H O 2v O =O 2P ⋅ω2=O 1O 2⋅ωH2r 2ω2=(r 1+r 2)ωHr 1ω1=2(r 1+r 2)ωH2(r 1+r 2)=r 1+r 311131211Hz ωr +rz +zi===r Hω例8 图示机构中,AB 杆一端连接滚子A ,滚子的中心A 以 速度vA = 16 cm/s沿水平方向匀速运动,AB 杆活套在可绕O 轴转动的套管C 内。
求AB 杆的角速度和角加速度。
1 ABP A =v A ABω=16=1.28(rad/s)P A 12.5=v A v C '=PC '⋅ωAB =AC '⋅tan ϕ⋅ωAB=82+62⋅6⨯1.28=9.6 cm/s 8P A =AC '=AC '=12.5cm8cos ϕ22 ABAB A C ’nC 'AC 'A=aA+a00a C '+a √√τ√=C 'A ⋅αAB a C 'A a τ2AB nC 'A =C A ⋅ω'。
AB C ’a C '=a e +a r +a C0 √√√=1.28rad/s=9.6cm/sωe =ωAB v r =v Ca C =2ωe ⋅v r =2⨯1.28⨯9.6=24.576 cm/s 21 2=a e +a r +a CnC A A C A a +a +a√ √ √√√''τ√ √√√√。
第二章平面机构的运动分析
2.2.1 速度瞬心的概念及机构中速度瞬心的数目
1、速度瞬心
当两构件作平面相对运动时,在 任一瞬时,都可以认为它们是绕 某一点作相对转动,该点称为瞬 时速度中心,简称瞬心,以p12 (或P21)表示。
相对瞬心位于两绝对瞬心之间,两构件转向相反。
求传动比 定义:两构件角速度之比传动比。
ω 3 /ω 2 = P12P23 / P13P23
2
P ω2 12 1
推广到一般:
ω i /ω j =P1jPij / P1iPij
P ω 233
3
P13
求齿轮机构传动比i23。
解:
1) K N(N 1) 3(3 1) 3
已知构件2的转速ω 2,求构件3的角速度ω 3 。
解: 用三心定律求出P23 。
n
求瞬心P23的速度 : VP23=μ l(P23P12)·ω 2
2
P ω2 12
1
P ω 233
3
P13
VP23=μ l(P23P13)·ω 3
n
∴ω 3=ω 2·(P13P23/P12P23)
VP23
方向: 与ω 2相反。
1、机构中瞬心位置的确定
(一)通过运动副直接相联的两构件的瞬心
1.以转动副联接的两构件,其瞬心的位置可直接由定义 确定:转动副的中心即为其瞬心;
2. 以移动副联接的两构件: 瞬心应位于垂直于移动副 导路方向的无穷远处;
3.以平面高副联接的两构件:
如果高副两元素之间为纯滚动,则两高副元素的接 触点即为两构件的瞬心;
1、位移(包括轨迹)分析
第二章平面机构运动分析(原理)
4.用瞬心法解题步骤 1)求瞬心的位置; 2)求出相对瞬心的速度; 3)求构件绝对速度V或角速度ω 。 5 瞬心法的优缺点: ①适合于求简单机构的速度,机构复杂时因瞬心数急剧增
加而求解过程复杂。
②有时瞬心点落在纸面外。精度低 ③仅适于求速度V,不能进行a分析使应用有一定局限性。
2—3 解析法作运动分析
• 3.杆组法
•
• 把I级机构和各杆组看成各自独立的单元、分别建立运动分析的数模,然后再编 成通用子程序,对其各运动参数进行求解。当对具体机构进行运动分析时,可 以通过调用原动件和机构中所需的基本杆组的通用子程序来解决。这样,可快 速求解出各杆件及其各点的运动参数。 在生产实际中应用最多的是II级机构=I级机构+II级组。本章只介绍I级机构和RRR、RRPII级杆组运动分析的数学模型。
方向: 与ω 2相同。
ω2
3 1
4
ω4
P14
相对瞬心位于两绝对瞬心的同一侧,两构件转向相同
2 )高副机构 已知构件2的转速ω 2,求构件3的角速度ω 3 。 解: 用三心定理求出P23 。
求瞬心P23的速度 :
n
P12 ω 2
1 2
VP23=μ l(P23P12)· 2 ω
VP23=μ l(P23P13)· 3 ω ∴ω 3=ω 2· 23P12/P23P13) (P 方向: 与ω 2相反。
长度P13P12直接从图上量取。
(绕P13转,P12点的速度)
2) 已知各构件尺寸及ω2
求: V4及各瞬心
解:瞬心数为:K=m(m-1)/2=6
(1 )直接观察 (4个)
(2) 三心定理 (2个)
P14
m=4
P14
3
1.机构的运动分析

第二章机构的运动分析• 2.1 对机构进行运动分析的目的和方法• 2.2 用速度瞬心法进行速度分析• 2.3 相对运动图解法• 2.4 解析法•2.1 对机构进行运动分析的目的和方法一、平面机构运动分析的目的1. 求解机构中某些点的运动轨迹或位移,确定机构的运动空间2.求解机构某些构件的速度、加速度,了解机构的工作性能3.为力分析作前期工作构件的惯性力与其加速度成正比,惯性力矩与其角加速度成正比。
二、运动分析的方法复数法矩阵法矢量法速度瞬心法相对运动图解法(一)图解法(二)解析法(三)实验法2.2 用速度瞬心法进行速度分析2.2.1 瞬心的基本概念2.2.2 用瞬心法进行机构的速度分析2.2.1 瞬心的基本概念一、瞬心概念二、平面机构瞬心的数目三、瞬心位置的确定在任一瞬时,两个作平面相对运动的构件都可以看成是围绕一个瞬时重合点作相对转动。
瞬时重合点若你站在机架上看是等速重合点或同速点瞬时回转中心瞬心一、瞬心A 1(A 2)B 1(B 2)12A2A1V B2B1V P 12平面运动两构件肯定存在一个相对速度为零,绝对速度相同的点.如果你站在机架上看那就是同速点二、平面机构瞬心的数目2(1)2NN N K C -==假设机构中含有N 个构件,每两个构件之间有一个瞬心,则全部瞬心的数目三、瞬心位置的确定1.两个构件之间用运动副连接的瞬心位置2.两个构件之间没有用运动副连接的瞬心位置1.两个构件之间用运动副连接的瞬心位置(1)两个构件用转动副连接时的瞬心位置(2)两个构件用移动副连接时的瞬心位置(3)两构件用平面高副连接时的瞬心位置12 P12P12P121122(1)两个构件用转动副连接时的瞬心位置P 1212∞(2)两个构件用移动副连接时的瞬心位置半径无穷大的转动副(3)两个构件用平面高副连接时的瞬心位置纯滚动连滚带滑2.两构件之间没有用运动副连接时的瞬心位置(1)三心定理(2)瞬心多边形法的步骤(1)三心定理作平面运动的三个构件有三个瞬心,且位于同一直线上。
第2章-平面机构运动分析(解析法)
复数矢量法
复数矢量法是将机构看成一封闭矢量 多边形,并用复数形式表示该机构的封闭 矢量方程式,再将矢量方程式分别对所建 立的直角坐标系取投影。
Hale Waihona Puke 1、铰链四杆机构2、曲柄滑块机构
3、导杆机构
§2-4 用解析法求机构的 位置、速度和加速度
图解法的缺点:
1、分析结果精度低; 2、作图繁琐、费时,不适用于一个运动周期的分析。 3、不便于把机构分析与综合问题联系起来。 随着计算机应用的普及,解析法得到了广泛的应用。 方法:复数矢量法、矩阵法、杆组法等。 思路: 由机构的几何条件,建立机构的位置方程,然后就位置方程对 时间求一阶导数,得速度方程,求二阶导数得到机构的加速度方 程。
第二章 平面连杆机构的运动分析
第二章 平面连杆机构的运动分析一、基本要求1) 正确理解速度瞬心的概念,会判断直接组成运动副的两构件的瞬心及 运用“三心定理”确定平面机构中没有直接组成运动副的两构件间的瞬心。
2)会用速度瞬心法对平面机构进行速度分析。
3)会用相对运动图解法(矢量方程图解法)及矢量方程复数法对Ⅱ级机 构进行速度及加速度分析。
二、基本概念和基础知识为了确定机器工作过程的运动和动力特性,往往需对机构进行运动分析。
机构运动分析就是在已知机构的运动尺寸和已知原动件的运动规律的前提下,确定机构中其它构件或其他构件上的某些点的位置、速度、加速度等运动参数。
机构运动分析的方法通常有矢量方程图解法和解析法。
图解法形象直观,简便,精度较低;解析法精度高,但需进行大量的数学运算,一般需借助电子计算机来完成。
1. 矢量方程图解法矢量方程图解法就是根据相对运动的原理列出机构中两点间的相对运动的矢量方程式,然后按一定的比例画出相应的矢量多边形,由此解出所需运动参数。
此方法的关键是如何正确列出矢量方程式。
建立矢量方程式时一定要注意将未知量分列于等式两端以便求解,另外每个矢量的角标一定要写清楚是哪个构件上的哪个点;画矢量多边形时由等式一边出发,先画已知量,画完等式一边的矢量后再画另一边的矢量,最后由矢量多边形求出所需未知量。
下面分两种情况进行讨论。
(1) 同一构件上两点间的速度和加速度关系。
这种类型常用于求解同一构件上两个回转副之间的速度及加速度关系。
需要注意的是加速度分析中的相对加速度通常由向心加速度与切向加速度两项构成,无哥氏加速度。
① .速度关系。
图3-1(a )所示机构中,点B 和C 同为构件2上的点,根据相对运动的原理,可知点C 的速度C v 等于点B 的速度B v 和点C 相对于点B 的相对速度CB v 的矢量和。
即C v = B v + CB v大小 ? AB l 1ω ? 方向 沿导路方向 ⊥AB ⊥BC图3-1 同一构件上两点的相对运动关系 (a)机构简图;(b)速度多边形;(c)加速度多边形由于一个矢量方程可转化为两个标量方程,故上面矢量方程含两个未知量,可解。
机构运动分析2
速度分析:了解从动件速度变化规 律,能否满足工作要求。例如:牛头刨床。 另外,功率=F×V。通过分析V,了解力F 变化规律。例:汽车上坡,牵引力↑、V↓。 又,V分析是a分析的前提。
加速度分析:了解加速度变化规律,计
算惯性力,研究动力性能。
运动分析法:图解法和解析法。
§3-2速度瞬心及其在机构速 度分析中的应用
2 3
例:求平面四杆机构图3—5图示位置时
全 部瞬心。N=4,K=6,即P12、 P13 、 P14 、 P23 、 P24 、 P34其中P12、P23、P34、 P14分别为四 个转动副的中心直接定出。而P13 、 P24由三心 定理求出。
< P<
P13
34
P12、P23 P14、P34 P12、P14 P23、P34
图解法: {
速度瞬心法 矢量方程图解法
1、速度瞬心
由理力知,当两构件1、2作平面
相对运动时在任一瞬时,都可以认 为它们绕某一点作相对转动,而该
点则称为瞬时速度中心,简称瞬心。 P12(P21)
瞬心-互相作平面相对运动的两构件上,
瞬时相对速度为零的点(等速重合点)。 Pij
{
绝对瞬心:P12点绝对速度为零
vc v pc m s
mm
c e b
vcb v bc m
பைடு நூலகம்
s
4、速度影像△bce∽△BCE
图3—8b
速度多边形(速度图)—由各速度矢量构 成的图形,P—速度多边形的极点。
1、 pb 代表点B的绝对速度 2、bc 代表 VCB ,方向b→c。
3、速度影像 △bce∽△BCE
当已知构件上的两点的速度时,则该 构件上其他任意一点的速度便可利用速度影象 的原理求出。例如当作出bc后,以bc为底边
机械原理:第二章机构的结构分析

斜齿轮机构
两个齿轮的齿廓为斜线,实现直线的 运动传递,同时具有较好的承载能力 和传动平稳性。
02
CHAPTER
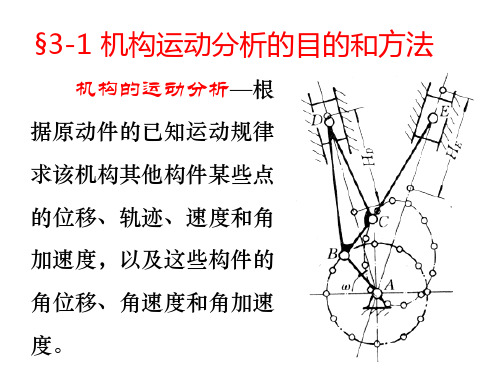
机构的运动分析
机构运动简图
总结词
机构运动简图是表示机构运动关系的图形,通过图形化方式展示机构的组成和运 动传递路径。
详细描述
机构运动简图是一种抽象的图形表示,它忽略了机构的实际尺寸和形状,只关注 机构中各构件之间的相对运动关系。通过绘制机构运动简图,可以清晰地了解机 构的组成、运动传递路径以及各构件之间的相对位置和运动方向。
常见的受力分析方法
详细描述:常见的受力分析方法包括解析法、图解法和 有限元法等,每种方法都有其适用范围和优缺点,应根 据具体情况选择合适的方法。
机构的平衡分析
总结词
理解机构平衡的概念是进行平衡 分析的前提。
详细描述
机构平衡是指机构在静止或匀速 运动状态下,各作用力相互抵消 ,机构不会发生运动状态的改变 。
轮系
定轴轮系
各齿轮的转动轴线固定,齿轮的 运动由一个主动轮通过各齿轮的
啮合传递到另一个从动轮。
行星轮系
其中一个齿轮的转动轴线绕着另 一固定轴线转动,行星轮既可绕 自身轴线自转,又可绕固定轴线
公转。
混合轮系
由定轴轮系和行星轮系组合而成, 既有定轴轮系的自转运动,又有
行星轮系的公转和自转运动。
凸轮机构
机构运动分析的方法
总结词
机构运动分析的方法主要包括解析法和图解法两种。
详细描述
解析法是通过建立数学模型,运用数学工具进行求解的方法。这种方法精度高,适用于对机构进行精确的运动学 和动力学分析。图解法是通过作图和测量来分析机构运动的方法,这种方法直观易懂,适用于初步了解机构的运 动关系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二讲平面机构的运动分析一用速度瞬心法作机构的速度分析1 速度瞬心的定义:作平面相对运动两构件上任一瞬时其速度相等的点,称为这个瞬时的速度中心。
分类:相对瞬心-重合点绝对速度不为零绝对瞬心-重合点绝对速度为零(与机架组成的瞬心)2 瞬心数目 K=N(N-1)/23 机构瞬心位置的确定直接观察法:适用于求通过运动副直接相联的两构件瞬心位置。
1)两构件组成转动副时,转动副中心即是它们的瞬心。
2)若两构件组成移动副时,其瞬心位于移动方向的垂直无穷远处。
3)若两构件形成纯滚动的高副时,其高副接触点就是它们的瞬心。
4)若两构件组成滚动兼滑动的高副时,其瞬心应位于过接触点的公法线上。
不直接形成运动副的两构件利用三心定理来确定其具体位置。
三心定理:三个彼此作平面平行运动的构件共有三个瞬心,且它们位于同一条直线上。
此法特别适用于两构件不直接相联的场合。
4传动比的计算ωi /ωj=P1j P ij / P1i P ij(其中1为机架)两构件的角速度之比等于绝对瞬心至相对瞬心的距离之反比。
5.角速度方向的确定相对瞬心位于两绝对瞬心的同一侧,两构件转向相同相对瞬心位于两绝对瞬心之间,两构件转向相反。
注:特殊位置的速度瞬心有些会重合或趋向无穷远处,标注需要特别注意,如下四图中前三图的构件2此瞬时的角速度均为0,d图的构件2的角速度始终为0(2做平动)。
2利用速度瞬心求解速度。
ωi /ωj=P1j P ij / P1i P ij 四杆机构题型:(江苏大学2014)哈工大东华2014 四杆以上机构题型:二、用矢量方程图解法作机构的速度和加速度分析 1.同一构件上两点之间速度,加速度的关系。
①由各速度矢量构成的图形称为速度多边形(或速度图);由各加速度矢量构成的图形称为加速度多边形(或加速度图)。
p ,'p 称为极点。
②在速度多边形中,由极点p 向外放射的矢量,代表构件上相应点的绝对速度。
而连接两绝对速度矢端的矢量,则代表构件上相应两点间的相对速度,方向与角标相反,如bc 代表CB v (C 点相对B 点的速度)。
③在加速度多边形中,由极点'p 向外放射的矢量代表构件上相应点的绝对加速度。
而连接两绝对加速度矢量端的矢量代表构件上相应两点间的相对加速度,方向与角标相反。
相对加速度可用其法向加速度和切向加速度来表示。
④极点p 代表机构图上的绝对瞬心。
⑤构件的速度影像:利用速度影像,若已知构件上两点的速度,可求第三点速度。
⑥同理'''d c b 称为加速度影像。
⑦速度影像及加速度影像的相似原理只能应用与同一构件上的各点,而不能应用于机构的不同构件上的各点。
2.两构件重合点间的速度,加速度的关系正确判断科氏加速度的存在及其方向:当两构件构成移动副时,重合点的加速度不相等,且移动副有转动分量时,必然存在哥氏加速度分量。
三、解题关键:1. 以作平面运动的构件为突破口,基点和重合点都应选取该构件上的铰接点,否则已知条件不足而使问题无法求解。
2.重合点的选取原则:选已知参数较多的点(一般为铰链点)常见题型1:同一构件上两点之间速度,加速度的关系基础题型:利用速度影像的题型:南理2009常见题型2(两构件重合点间的速度,加速度的关系) 第一类:重合处有铰链已知导杆机构中,机构的位置,各构件的长度及曲柄1的等角速度1ω,求导杆3的角速度和角加速度。
(1)确定构件3的角速度ω点B 是构件1上的点,也是构件2上的点,故21B B AB v v l ω⋅1==两构件组成移动副时,据点的复合运动的分解和合成原理,构件2与构件3上瞬时重合点23()B B B 间的速度关系为3232B B B B v v v =+方向:⊥BC ⊥AB ∥BC 大小: ? 1AB l ω ? 绘速度多边形,知:32233v 3v B B v B v b b pb μμ⋅⋅=,=(2)确定导杆3的角加速度构件1与构件2上瞬时重合)(21B B B 间的加速度关系为:32r B B a 为3B 点对于2B 点的相对加速度,其方向沿导杆方向,见图c )中的3''k b ;32k B B a 为哥氏加速度,方向是将相对速度32B B v 沿牵连构件角速度2ω的转向转︒90,如图c )中2''b k 所示。
注:1) 由于2B 、3B 是两构件上的瞬时重合点,因此即既不能用速度影像法,也不能用加速度影像法来求3B 点的速度和加速度;2) 两构件组成移动副时,其瞬时重合点之间的加速度关系中可能存在哥氏加速度。
但是由于322322k B B B B a v ω=,故哥氏加速度必然发生在牵连构件作转动,且两构件有相对运动的情况下,两者缺一不可(如3-4)。
据此可知在同一构件上各点之间的加速度关系中是绝对不可能出现哥氏加速度的。
哥氏加速度的存在及其方向的判断:用移动副联接的两构件若具有公共角速度,并有相对移动时,此两构件上瞬时重合点的绝对加速度之间的关系式中有哥氏加速度。
2.在图示机构中,已知,,s rad /1004511=︒=ωϕ 方向为逆时针方向,l AB =4m ,︒=60γ,请用瞬心法和相对运动图解法分别求构件2的角速度ω2和构件3的速度3v 、加速度(20分)。
解:1. 取长度比例尺μl =0.1m/mm ,作机构运动简图B 12 31B 23BB12 3 牵连运动为平动,无a k B 1 23牵连运动为平动,无a k 牵连运动为转动,有a k 牵连运动为转动,有a kB 12 3B123 牵连运动为转动,有a k B1 2 3B 123牵连运动为转动,有a k 牵连运动为转动,有a k 牵连运动为转动,有a k2. 用速度瞬心法求解构件速度: 在机构运动简图上画出瞬心。
1)分析构件2的运动为平动(运动轨迹为一个圆),故ω2=0。
2)构件3;瞬心P 13是构件1和构件3 的等速重合点, 有:v 3=ω1•(μl •P 13P 14 ) 量得P 13P 14长度为12mm ,故有 V 3=100•0.1•12=120m/s3.用相对运动图解法求解构件速度2323B B B B v v v+= 方向:水平 ⊥AB ∥CD 大小: ? ω1l AB ? v B2=ω1•l AB =100•4=400m/s取速度比例尺μv =10m/s/mm 作速度多边形 有 v 3=v B3=μv •pp b3量得pp b3长度为12mm ,故有 v 3=v B3=10×12=120m/s注:此题若计算构件3的加速度,因其做移动,所以无科氏加速度。
注:此题若计算构件3的加速度,因滑块和CD 杆相对速度为0,所以无科氏加速度。
总结:以上几个例子中重合处有铰链,构件不用扩延。
第二类:以下几个题中重合处没有铰链,构件需要扩延找已知条件全的重合点:4.图示机构中,构件1以顺时针方向转动,已知各构件尺寸。
试用相对运动图解法求图示位置从动件3的速度和加速度。
(写出矢量方程式,并列出有关计算式,比例尺任选。
)解:杆3扩大到B 点(1)2323B B B B v v v +=∴v B pb v v μ333== (2)r 23k 2323B B B B B B a a a a ++= ∵0 , 0k 2323===B B a ωω ∴a Bb a a μπ 333 ==6已知:在图示机构中,l AB =l BC =l CD =l ,且构件1以ω1匀速转动。
AB 、BC 处于水平位置CD ⊥BC ,试用相对运动图解法求ω3,α3 (μv 和μa 可任意选择)。
解: 属于两构件间重合点的问题思路:因已知B 2点的运动,故通过B 2点求B 3点的运动。
1) 速度分析 3232B B B B v v v =+方向:⊥BD ⊥AB ∥CD大小: ? ω12l ?在速度多边形中,∵b 3与极点p 重合,∴v B3=0且ω3=v B3/ l BD =0,由于构件2与构件3套在一起,∴ω2=ω3=0 2) 加速度分析33323232n t n k rB B B B B B B B a a a a a a =+=++ 方向: ⊥BD B →A ∥CD大小: 0 ? ω12l 0 ? 在加速度多边形中,矢量'3b π代表3t B a则有:22313122t B BD a l l lωαω•===•将矢量'3b π移至B 3点,可见为α3逆时针。
32B B v ω1 D CBA 234 1 b 2 p(b 3) 3tB a32r B B ab 3'b 2'p'或π常见题型3(前两种情况综合起来应用)\单项选择题:1、速度和加速度影像法给运动分析带来方便,但这只适用于______上。
错误!未找到引用源。
A、整个机构B、主动件;错误!未找到引用源。
C、两构件;错误!未找到引用源。
D、同一构件;2、三个彼此作平面相对运动的构件共有______个瞬心,而且必定位于______上。
错误!未找到引用源。
A、3; 运动副; 错误!未找到引用源。
B、3; 构件;错误!未找到引用源。
C、2; 同一直线; 错误!未找到引用源。
D、3; 同一直线3、若已知一构件上两点的速度及加速度,则该构件上任一点的速度及加速度可求。
()错误!未找到引用源。
A、正确; 错误!未找到引用源。
B、不正确;错误!未找到引用源。
C、部分正确错误!未找到引用源。
D、不一定4、在加速度多边形中,连接极点至任一点的矢量,代表构件上相应点的______加速度;而其它任意两点间矢量,则代表构件上相应两点间的______加速度。
错误!未找到引用源。
A、法向; 切向; 错误!未找到引用源。
B、绝对; 相对;错误!未找到引用源。
C、法向; 相对; 错误!未找到引用源。
D、合成; 切向5、若两构件构成移动副,则两构件上任意重合点相对速度值______;两构件角速度______。
错误!未找到引用源。
A、相等; 相等; 错误!未找到引用源。
B、不相等; 不相等;错误!未找到引用源。
C、相等; 不相等错误!未找到引用源。
D、不相等; 相等6、如果一个机构是由四个构件组成的,那么它的瞬心数目为________。
错误!未找到引用源。
A、4 错误!未找到引用源。
B、3错误!未找到引用源。
C、6 错误!未找到引用源。
D、57、二构件用转动副相联接其瞬心是在转动副的________;以移动副联接时其瞬心在________;其间若为纯滚高副时,瞬心在两元素的________。
错误!未找到引用源。
A、中心; 中心; 接触处错误!未找到引用源。
B、中心; 无穷远; 中心错误!未找到引用源。
C、中心; 无穷远; 接触处错误!未找到引用源。