自动控制原理—第六章(2)
合集下载
自动控制原理胡寿松第六章PID

j
若设 T1 T2,
则
T1
T1
T2
T2
即 p1z1z2p2
1 1 1 T2 T2 T1 T1
p 2 z2 z1 p1
0
1、幅相特性:
§6—2 常用校正装置及其特性
G cj
1 1 22 T 2 1 T 2 1 2 1 1 2 2 T T 2 2 2 2 2 t g 1T 1 t g 1
使 Lcm10lg1 与 Lc' 之和为 0,即可求得 。
b)若对
' c
未提出要求,则由 m0(裕量
510),求得
m
。则有
1 1
s i nm s i nm
在
L上查出其幅值为
10
lg
1
,所对应的
就是
' c
,且 m c'。
§6—3 串联校正
4)1T 1, m 1T, 21 T,
1 m c',
相位超前,故称滞后—超前网络。当
1 T1
和
1 T2
相差
足够大(如几十倍以上),则可利用滞后网络和超
前网络的计算公式计算 m1和m2。
3、实用形式:
此网络无衰减,两边对称,直接使用即可。
二、有源校正网络:
§6—2 常用校正装置及其特性
1、P调节器:
Gc
Kp
R2 R1
2、D调节器: GcRCT sds
R1
Ur
Uc
R2
GcsZ1Z2Z2
R2 R R1
R1Cs1
R 2R 1Cs1 R 2 R 1Cs1
R 1R 2C sR 1R 2 R 1R 2R 1R 2R 2R 1Cs1
06 自动控制原理—第六章(2)
2
1
1 T2
之间渐近线斜率为-20dB/dec,起积分作用;转折频
T1
与
1 T1
之间渐近线斜率为+20dB/dec,起微分作用。
二、串联滞后—超前校正装置对被校正系统的影响
1)利用相位滞后部分使被校正系统幅值衰减的作用, 所以容许在低频段提高,即增加开环放大系数,以改善 系统的稳态性能。 2)利用相位超前部分,能够给系统提供相位超前角 度,从而使相位裕量增大,改善了系统的动态性能。 滞后—超前校正装置兼具了滞后校正与超前校正 的优点,能够全面改善系统的动态与稳态性能。
三、有源滞后校正装置
6.4.2 系统滞后校正的分析法设计
一、一般步骤
1.按稳态性能的要求确定系统的型别与开环放大系数; 2.按确定的开环放大倍数绘制未校正系统的对数频率特 性,并求开环频域指标:相位裕量与幅值穿越频率等; 3.确定校正后的幅值穿越频率’c 原系统在 ’ c 处的相位裕量应为γ 0=γ ’+△,其中γ ’是 要求的相角裕度,而△=5°~15°是为了补偿滞后校正装 置引起的相角滞后。在波德图上找出符合这一相位裕量的 频率,作为校正后系统的开环对数幅频特性的幅值穿越频率 ’c。
c
三、四阶期望特性
具有较好性能的典型四阶系统的传递函数如下,是I型四阶系统。
G (s) K ( T 2 s 1) s ( T1 s 1)( T 3 s 1)( T 4 s 1)
渐近线的斜率分别为: -20dB/dec、-40dB/dec、-20dB/dec、-40dB/dec、-60dB/dec 工程上常称为:1-2-1-2-3型系统 当中频段具有一定的宽 度h=3/2时,可以实现 系统既在低频段有较高 的高度以保证稳态性能 ,同时又以-20dB/dec斜 率穿越中频段,保证动 态性能。
《自动控制原理》第6章_自动控制系统的校正

频率法校正的基本原理: 利用校正网络的特性来增大系统的相位裕度,
改善系统瞬态响应。
校正装置分类
校正装置按 控制规律分
超前校正(PD) 滞后校正(PI)
滞后超前校正(PID)
校正装置按 实现方式分
有源校正装置(网络) 无源校正装置(网络)
有源超前校正装置
R2
u r (t)
i 2 (t)
R1
i1(t)
(aTa s
1)(Tb a
s
1)
滞后--超前网络
L'()
20db / dec
20 lg K c
1 1/ T1 2 1/ T2
设相角为零时的角频率
1
()
a)
20db / dec
5
1 T1T2
90
5 校正网络具有相
5
位滞后特性。
90
b)
5 校正网络具有相位
超前特性。
G( j)
Kc
( jT1
G1 (s)
N (s) C(s)
G2 (s)
性能指标
时域:
超调量 σ%
调节时间 ts
上升时间 tr 稳态误差 ess
开环增益 K
常用频域指标:
开环频域 指标
截止频率: 相角裕度:
c
幅值裕度:
h
闭环频域 指标
峰值 : M p
峰值频率: r
带宽: B
复数域指标 是以系统的闭环极点在复平面
上的分布区域来定义的。
解:由稳态速度误差系数 k v 1应00 有
G( j)
100
j( j0.1 1)( j0.01 1)
100 A()
1 0.012 1 0.00012
改善系统瞬态响应。
校正装置分类
校正装置按 控制规律分
超前校正(PD) 滞后校正(PI)
滞后超前校正(PID)
校正装置按 实现方式分
有源校正装置(网络) 无源校正装置(网络)
有源超前校正装置
R2
u r (t)
i 2 (t)
R1
i1(t)
(aTa s
1)(Tb a
s
1)
滞后--超前网络
L'()
20db / dec
20 lg K c
1 1/ T1 2 1/ T2
设相角为零时的角频率
1
()
a)
20db / dec
5
1 T1T2
90
5 校正网络具有相
5
位滞后特性。
90
b)
5 校正网络具有相位
超前特性。
G( j)
Kc
( jT1
G1 (s)
N (s) C(s)
G2 (s)
性能指标
时域:
超调量 σ%
调节时间 ts
上升时间 tr 稳态误差 ess
开环增益 K
常用频域指标:
开环频域 指标
截止频率: 相角裕度:
c
幅值裕度:
h
闭环频域 指标
峰值 : M p
峰值频率: r
带宽: B
复数域指标 是以系统的闭环极点在复平面
上的分布区域来定义的。
解:由稳态速度误差系数 k v 1应00 有
G( j)
100
j( j0.1 1)( j0.01 1)
100 A()
1 0.012 1 0.00012
自动控制原理_吴怀宇_第六章控制系统的校正与设计

扰动补偿 输入补偿
自动控制原理
按扰动补偿的复合控制系统如图6-3所示。
N(s)
+
Gn (s)
R(s) + E(s)
+
G1 (s)
G2 (s)
C(s)
-
图6-3 按扰动补偿的复合控制系统
自动控制原理
按给定补偿的复合控制系统如图6-4所示。
Gr ( s)
R( s) E( s)
+
G( s )
+
C( s)
自动控制原理
6.4.1 超前校正
基本原理:利用超前校正网络的相角超前特性去增大系 统的相角裕度,以改善系统的暂态响应。 用频率特性法设计串联超前校正装置的步骤:
(1)根据给定的系统稳态性能指标,确定系统的开环增益 ;
K)绘制在确定的 值下系统的伯德图,并计算其相角裕 (2 度 ; K 0
(3)根据给定的相角裕度 ,计算所需要的相角超前量 0
m
60º
40º
20º
1
0 4 8 12 14 20
图6-16 最大超前相角 m 与 的关系
自动控制原理
6.3.2 滞后校正装置 相位滞后校正装置可用图6-17所示的RC无源网络实现, 假设输入信号源的内阻为零,输出负载阻抗为无穷大,可 求得其传递函数为:
G c ( s) s zc s 1 1 s 1 ( ) s pc s 1 ( ) s 1
自动控制原理
与相位超前网络类似,相位滞后网络的最大滞后角位于
1 与 1 的几何中心处。
图6-21还表明相位滞后校正网络实际是一低通滤波器, 值 它对低频信号基本没有衰减作用,但能削弱高频噪声, 10 较为适宜。 愈大,抑制噪声的能力愈强。通常选择 一般可取
自动控制原理第六章线性系统的校正方法

对数幅频特性曲线如下图
16
10 3) 预选Gc(s)=τs+1,则 Gk ( s ) = (τs + 1) s ( s + 1)
′ 要求τ使系统满足 γ ′′ 和 ω c′ 的要求。 ′ 选择 ω c′=4.4dB/dec,求τ,则:
" L( wc ) = 20 lg 10 − 20 lg 4.4 − 20 lg 4.4 + 20 lg 4.4τ
1 / 2T 则 Gk ( s ) = s (Ts + 1)
其相频特性为: ϕ (ω ) = −90o − arctan Tω
1 = 63.5o γ (ωc ) = 180 + ϕ (ωc ) = 180 − 90 − arctan T ⋅ 2T
o o o
h=∞
21
∴由 ξ = 0.707 得性能指标为:
2
N R E
串联 校正 控制器 对象
已知被控对象数学模型 G p (s),即根据生产要求而 得到的系统数学模型,称为 固有部分数学模型,在工程 实际中是不能改变的。
C
反馈 校正
根据固有数学模型和性能要求进行分析,若现有闭环情况 下没有满足的性能指标或部分没有满足要求的性能指标,则人 为的在固有数学模型基础上,另加一些环节,使系统全面满足 性能指标要求,这个方法或过程称为校正,也称为系统设计。 所附加的环节被称为控制器,其物理装置称为校正装置。 通常记为Gc(s)
2 2 典型二阶系统可表示为: ωn ωn Φ(s) = 2 Gk ( s) = 2 s ( s + 2ξω n ) s + 2ξω n s + ω n
ξ
19
2 ωn C ( jω ) Φ ( jω ) = = =1 2 2 R ( jω ) ( jω ) + 2ξωn ⋅ jω + ωn 2 ωn
自动控制原理第六章控制系统补偿与综合2
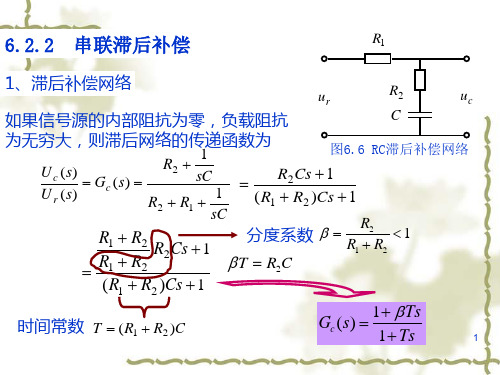
6.2.2 串联滞后补偿
R1
1、滞后补偿网络
ur
R2
uc
如果信号源的内部阻抗为零,负载阻抗
C
为无穷UU cr大((ss,)) 则GRR滞c11(s后)RR网22RR络2R2C的2 Rs传1s1C1递s1C函T数分(为R度R12R系C2RC数2s)C1s图6R1.16R2RRC2滞后1 补偿网络 (R1 R2 )Cs 1
不难看出,滞后补偿的不足之处是:补偿后系统的截止频 率会减小,瞬态响应的速度要变慢;在截止频率c 处,滞
后补偿网络会产生一定的相角滞后量。为了使这个滞后角
尽可能地小,理论上总希望 Gc (s) 两个转折频率1,2比c
越小越好,但考虑物理实现上的可行性,一般取:
2
1
T
0.25
~ 0.1c
4
在系统响应速度要求不高而抑制噪声电平性能要求较 高的情况下,可考虑采用串联滞后补偿。 保持原有的已满足要求的动态性能不变,而用以提高 系统的开环增益,减小系统的稳态误差。 如果所研究的系统为单位反馈最小相位系统,则应用频 率法设计串联滞后补偿网络的步骤如下:
2 rad s
1 T
1 2.5
0.4 rad
s
则滞后网络的传递函数
T 1 0.5S 0.1c
T 1 1 2.5S
0.1c 2 • 0.2
Gc
(
s)
1 1
0.5S 2.5S
补偿后系统的框图如下图所示,其开环传递函数为
Gc
(s)G(s)
100 (1 0.5S) S(0.04S 1)(1 2.5S)
增益K。
Kv
lim
s0
S
100 K S(0.04S 1)
R1
1、滞后补偿网络
ur
R2
uc
如果信号源的内部阻抗为零,负载阻抗
C
为无穷UU cr大((ss,)) 则GRR滞c11(s后)RR网22RR络2R2C的2 Rs传1s1C1递s1C函T数分(为R度R12R系C2RC数2s)C1s图6R1.16R2RRC2滞后1 补偿网络 (R1 R2 )Cs 1
不难看出,滞后补偿的不足之处是:补偿后系统的截止频 率会减小,瞬态响应的速度要变慢;在截止频率c 处,滞
后补偿网络会产生一定的相角滞后量。为了使这个滞后角
尽可能地小,理论上总希望 Gc (s) 两个转折频率1,2比c
越小越好,但考虑物理实现上的可行性,一般取:
2
1
T
0.25
~ 0.1c
4
在系统响应速度要求不高而抑制噪声电平性能要求较 高的情况下,可考虑采用串联滞后补偿。 保持原有的已满足要求的动态性能不变,而用以提高 系统的开环增益,减小系统的稳态误差。 如果所研究的系统为单位反馈最小相位系统,则应用频 率法设计串联滞后补偿网络的步骤如下:
2 rad s
1 T
1 2.5
0.4 rad
s
则滞后网络的传递函数
T 1 0.5S 0.1c
T 1 1 2.5S
0.1c 2 • 0.2
Gc
(
s)
1 1
0.5S 2.5S
补偿后系统的框图如下图所示,其开环传递函数为
Gc
(s)G(s)
100 (1 0.5S) S(0.04S 1)(1 2.5S)
增益K。
Kv
lim
s0
S
100 K S(0.04S 1)
自控原理第六章
ui(t)
R2 C
-
Ts 1 Gc ( s) Ts 1
2013-8-1 《自动控制原理》第六章
无源滞后网络
ቤተ መጻሕፍቲ ባይዱ
22
极点分布如图所示,极点总位于零点的右边,具体位置与 β有关。若T值够大,则构成一对开环偶极子,提高了系统 的稳态性能。
1 1 滞后网络的零点 zc ,极点 pc ,零、 T T
2013-8-1 《自动控制原理》第六章 15
第二节 常用校正装置及其特性
一、超前校正装置 C
又称微分校正,分为无源超 前网络和有源超前网络
+
R1 R2
+
U 0 ( s) R2 Gc ( s ) U i ( s) R1 R2
R2 R1 R2
(a 1) T R1C
R1Cs 1 ui(t) R2 R1Cs 1 R1 R2 -
2013-8-1 《自动控制原理》第六章 17
另外从校正装置的表达式来看,采用无源超前校正 装置进行串联校正时,系统的开环增益要下降倍,为了 补偿超前网络带来的幅值衰减,通常在采用无源RC超前 校正装置的同时串入一个放大倍数Kc=1/ 的放大器。超 前校正网络加放大器后,校正装置的传递函数
Ts 1 Gc ( s) Ts 1
2013-8-1
《自动控制原理》第六章
1
第一节
控制系统校正的基本概念
一、校正的一般概念
自动控制系统工程研究 分析:建立系统的数学模型并计算其性能指标 设计:根据各项性能指标来合理的选择控制方案 和结构形式 系统的校正 用添加新的环节去改善系统性能的过程称为系统的 校正,所添加的环节称为校正装置。
自控第6章 线性系统的校正方法
自动控制原理 Automatic Control Theory
第 六 章
线性系统的校正方法
本章主要内容
6-1 系统的设计与校正问题
6-2 常用校正装置及其特性
6-3 串联校正 6-4 反馈校正 6-5 复合校正
校正:是在系统中加入一些其 参数可以根据需要而改变的机构或 装置,使系统的整个特性发生变化,
Ta R1C1
Tb R2C2,
Tb Ta
T1 Tb 1 Ta T2
式中前一部分为相位滞后校正,后一部分为相位 超前校正。对应的波特图如图所示。由图看出不同频
段内呈现的滞后、超前作用。
波特图
Gc ( s )
(1 Ta s )(1 Tb s ) T (1 Ta s )(1 b s )
Phase (deg)
-135
-180 10
-2
10
-1
10
0
10
1
10
2
10
3
Frequency (rad/sec)
设计无源超前校正网络步骤: 1)根据稳态误差要求,确定开环增益K。 2)利用已确定的开环增益,计算待校正 系统的相角裕度。 3)根据截止频率的要求,计算超前网络 参数a和T。 4)验算已校正系统的相角裕度。
求得
( c) 46
于是 ,由 (c) 曲线查得 c 2.7(rad / s) .由于指标要 求 c 2.3 ,故 c 值可在2.3~2.7范围内任取 .考虑到 c 取
1 1
说明系统不稳定。
Magnitude (dB)
Bode Diagram Gm = -6.02 dB (at 7.07 rad/sec) , Pm = -17.2 deg (at 9.77 rad/sec) 50 0 -50 -100 -150 -90
第 六 章
线性系统的校正方法
本章主要内容
6-1 系统的设计与校正问题
6-2 常用校正装置及其特性
6-3 串联校正 6-4 反馈校正 6-5 复合校正
校正:是在系统中加入一些其 参数可以根据需要而改变的机构或 装置,使系统的整个特性发生变化,
Ta R1C1
Tb R2C2,
Tb Ta
T1 Tb 1 Ta T2
式中前一部分为相位滞后校正,后一部分为相位 超前校正。对应的波特图如图所示。由图看出不同频
段内呈现的滞后、超前作用。
波特图
Gc ( s )
(1 Ta s )(1 Tb s ) T (1 Ta s )(1 b s )
Phase (deg)
-135
-180 10
-2
10
-1
10
0
10
1
10
2
10
3
Frequency (rad/sec)
设计无源超前校正网络步骤: 1)根据稳态误差要求,确定开环增益K。 2)利用已确定的开环增益,计算待校正 系统的相角裕度。 3)根据截止频率的要求,计算超前网络 参数a和T。 4)验算已校正系统的相角裕度。
求得
( c) 46
于是 ,由 (c) 曲线查得 c 2.7(rad / s) .由于指标要 求 c 2.3 ,故 c 值可在2.3~2.7范围内任取 .考虑到 c 取
1 1
说明系统不稳定。
Magnitude (dB)
Bode Diagram Gm = -6.02 dB (at 7.07 rad/sec) , Pm = -17.2 deg (at 9.77 rad/sec) 50 0 -50 -100 -150 -90
精品文档-自动控制原理(王春侠)-第六章
的输入信号为斜坡函数r(t)=R1t, 则由表3-3可知,在无PI控 制器时,系统的稳态误差为R1/K0; 而接入PI控制器后,系 统的稳态误差为零。表明Ⅰ型系统采用PI控制器后,可以消除
系统对斜坡输入信号的稳态误差,控制准确度大为改善。
25
图6-10 比例-积分控制系统
26
采用PI控制器后,系统的特征方程为 TiTs3+Tis2+KpK0Tis+KpK0=0
Kp Ti
•
(1s
1)( 2s
s
1)
式中
1
1 2
Ti
1
1
4
Ti
2
1 2
Ti
1
1
4
Ti
(6-17)
30
由式(6-17)可见,当利用PID控制器进行串联校正时,除 可使系统的型别提高一级外,还将提供两个负实零点。与PI控 制器相比,PID控制器除了同样具有提高系统的稳态性能的优 点外,还多提供一个负实零点,从而在提高系统性能方面具有 更大的优越性。因此,在工业过程控制系统中,广泛使用PID 控制器。PID控制器各部分参数的选择是在系统现场调试中最 后确定的。通常,应使I部分发生在系统频率特性的低频段, 以提高系统的动态性能; 而使D部分发生在系统频率特性的中 频段,以改善系统的动态性能。
在串联校正时,采用I控制器可以提高系统的型别(无差
度),有利于系统稳态性能的提高,但积分控制使系统增加
了一个位于原点的开环极点,使信号产生90°的相角滞后,
对系统的稳定性不利。因此在控制系统的校正设计中,通常
不宜采用单一的I控制器。I控制器如图6-8所示。
20
图6-8 I控制器
21
自动控制原理第六章
R(s) + -
校正装置 Gc (s)
原有部分 Go(s)
C(s)
R(s)
+ -
+ -
原有部分 Go(s) 校正装置 Gc (s)
C(s)
(a) 串联校正
(b ) 反馈校正
R(s) + -
校正装置 Gc1(s)
+ -
原有部分 Go(s) 校正装置 Gc2(s)
C(s) R(s)
校正装置 Gc (s) + - + + 原有部分 Go(s) C(s)
第六章 线性系统的校正方法
系统的设计与校正问题 常用校正装置及其特性 串联校正 反馈校正
前面几章,我们主要学习了如何分析一个控制系统, 分析控制系统是否稳定,并且通过求解系统暂态性能指标、
稳态误差我们可以评价此系统性能的好坏。
这一章,我们着重介绍如何设计校正装臵使原不满足性 能指标要求的系统满足所要求的性能指标。
制器对系统性能的影响。
R(s) + - E(s) Kp(1 +Tds)
1 Js 2
C(s)
图 6-3 比例-微分控制系统
解 无PD控制器时, 系统的特征方程为
Js2+1=0
显然, 系统的阻尼比等于零, 系统处于临界稳定状态, 即 实际上的不稳定状态。 接入PD控制器后, 系统的特征方程
为
Js2+KpTds+Kp=0
系统由原来的Ⅰ型系统提高到了Ⅱ型系统。若系统的输入 信号为单位斜坡函数, 则无PI控制器时, 系统的稳态误差为1/K;
接入PI控制器后, 稳态误差为零。表明Ⅰ型系统采用PI控制器
后, 可以消除系统对斜坡输入信号的稳态误差, 控制精度大为 改善。 采用PI控制器后, 系统的特征方程为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
三、有源滞后校正装置
6.4.2 系统滞后校正的分析法设计
一、一般步骤
1.按稳态性能的要求确定系统的型别与开环放大系数; 2.按确定的开环放大倍数绘制未校正系统的对数频率特 性,并求开环频域指标:相位裕量与幅值穿越频率等; 3.确定校正后的幅值穿越频率’c 原系统在 ’ c 处的相位裕量应为γ 0=γ ’+△,其中γ ’是 要求的相角裕度,而△=5°~15°是为了补偿滞后校正装 置引起的相角滞后。在波德图上找出符合这一相位裕量的 频率,作为校正后系统的开环对数幅频特性的幅值穿越频率 ’c。
Go(s)为未校正系统的开环传递函数即系统固有部分
6.6.2 常见系统的期望特性
一、二阶期望特性
二阶的开环传递函数为:
n K G( s) s(Ts 1) s( s 2 n )
2
n / 2
s( 1 2 n s 1)
幅值穿越频率 c
n K 2
1 T
二、滞后—超前校正时应注意的问题
滞后—超前校正可以充分发挥超前校正和滞后校正
各自的优点,全面提高系统的动、静态性能。但要注意 校正的滞后特性应设置在较低的频段,用以提高系统的 放大系数;而超前特性应设置在中频段,用来增大相位 裕量及幅值穿越频率,以确保滞后校正与超前校正优势 的共同发挥。
6.6 期望对数频率特性设计法
三、有源滞后校正装置
6.5.2 系统滞后—超前校正的分析法设计
一、一般步骤
1.根据稳态精度的要求确定系统无差度阶数与开环放大系数。 2.由已经满足稳态精度的开环放大系数绘制未校正系统的对数频率 特性,并确定未校正系统的开环频域指标:相位裕量与幅值穿越频率 等。 3.确定校正后的幅值穿越频率’c 由于需要相位超前部分给系统提供相位超前角度,从而使相位裕量 增大。故一般选择校正前的相角穿越频率 g为校正后的幅值穿越频率 ’c。 4.确定滞后超前校正装置的滞后部分 取 1 'c ~ 'c
相角位移:()=arctanT-arctan(T)
波德图 滞后校正装置伯德图的 特点: 1)转折频率之间渐近 线 斜 率 为 -20dB/dec , 起积分作用; 2) ()在整个频率范 围 内 都 <0 , 具 有 相 位 滞后作用; 3) ()有滞后最大值 m; 4) 此装置对输入信号 有低通滤波作用。
4. 确定滞后网络的值 在波德图上确定未校正系统在’c处的对数幅值LO( ’c)=20lg=-20lg1/,由此可以查表或直接计算求出 的值。 5.确定滞后校正网络的转折频率 取校正装置的第二个转折频率
2
1 'c 'c ~ ,求出T T 10 2
Ts 1 Ts 1
从根轨迹的角度看,由于校正装置的传递函数为
1 ) Ts 1 1 T Gc ( s) Ts 1 ( s 1 ) T (s
零极点的分布如图6-2所示,相当于给系统增加了一个 开环零点与开环极点。而且开环极点较开环零点更接 近原点,对输入有明显的积 分作用。如果 T 值较大,相 当于系统提供了一对靠近原 点的开环偶极子,有利于改 善系统的稳态性能。
2
1 'c 'c ~ T 10 2
二、串联滞后校正装置对被校正系统性能的影响
1)系统的中频段与高频段被压缩,校正后的幅值穿 越频率’c减小。 2)由于系统相位在频率较低时相位滞后相对较小, 故相位裕量增大,改善了系统的相对稳定性。 3)高频段的衰减使系统的抗高频扰动能力增强。 4)频带宽度变窄,快速性将受影响。
6.6.3 应用实例
[例6-5]
某小功率角度随动系统的结构图如图所示。检测比较元件,功率放大元件和被控
K 2 10
对象的传递函数分别为
G1 (s) 4
G2 ( s)
2 0.025 s 1
G3 ( s)
2.5 12.5 0.2 s(0.1s 1) 0.1s 1 s
1 1 1 与 T 之间渐近线斜率为-20dB/dec,起积分作用;转折频 T2 2
率 T 与 T 之间渐近线斜率为+20dB/dec,起微分作用。 1 1
二、串联滞后—超前校正装置对被校正系统的影响
1)利用相位滞后部分使被校正系统幅值衰减的作用, 所以容许在低频段提高,即增加开环放大系数,以改善 系统的稳态性能。 2)利用相位超前部分,能够给系统提供相位超前角 度,从而使相位裕量增大,改善了系统的动态性能。 滞后—超前校正装置兼具了滞后校正与超前校正 的优点,能够全面改善系统的动态与稳态性能。
三、四阶期望特性
具有较好性能的典型四阶系统的传递函数如下,是I型四阶系统。 K (T2 s 1) G( s) s(T1s 1)(T3 s 1)(T4 s 1) 渐近线的斜率分别为: -20dB/dec、-40dB/dec、-20dB/dec、-40dB/dec、-60dB/dec 工程上常称为:1-2-1-2-3型系统 当中频段具有一定的宽 度h=3/2时,可以实现 系统既在低频段有较高 的高度以保证稳态性能 ,同时又以-20dB/dec斜 率穿越中频段,保证动 态性能。
Go ( s ) K s( s 1)(25s 1)
试设计串联校正装置,使系统满足性能指标:K≥5 , γ≥40º ωC≥0.5S-1 , 。 解:(1)绘制K=5时的未校正系统的对数幅频特性曲线如图6-18 Go 所示. 由于 L( 1) 20lg 5dB 根据
0 20lg 5 40 lg c1 lg1
采用滞后校正装置可从二个角度去考虑: 1.用于稳态性能已满足,但动态性能较差的系统。 2.用于需要提高系统的相角裕量γ,改善稳定性,但又无 法采用超前校正的系统。
6.5滞后-超前校正装置及其参数的确定
6.5.1相位滞后-超前校正装置及其特性
一、无源滞后—超前校正装置
波特图
滞后-超前校正装置伯德图的特点: 1)在0<<o的频率范围内都有()<0,具有相位滞后作用;在o <<∞的 频率范围内都有()>0,具有相位超前作用; 2)低频段与高频段斜率为0,由于滞后部分与超前部分转折频率之比均为β, 即·α=1,故低频段与高频段对数幅值相等,均为零分贝; 3)转折频率
可求得 c1 2.24rad / s 0.5rad / s
相应的相角稳定裕度 180 90 arctan c1 arctan0.25 c1 5.1
未校正系统是不稳定的。 由于 c1 0.5rad / s , 所以考虑采用串联滞后校正装置。
比较校正前后系统的性能,有 1)滞后校正装置的负斜率段压缩了系统的开环对数幅频 特 性 的 中 频 段 , 使 穿 越 频 率 由 -40 dB/dec 变 为 -20 dB/dec,系统的幅值穿越频率 c 由2.24rad/s左移到 0.52rad/s,利用系统本身的相频特性使系统稳定, 并具有42.53°的相位裕量。 2)不影响系统的低频段,不改变系统的稳态精度。 4)高频段对数幅值下降,抗干扰性能有所提高 总的来说,系统串联滞后校正装置后,在保证稳态性能的 前提下,改善了动态性能。
对系统提出的性能指标要求为: ts 无差度阶数 1 ,速度误差系数K 200s 1 ,最大超调量 % ≤25%,调节时间 。试用期望对数频率特性法确定系统的串联校正装置的特性。
≤0.4s
6.7 反馈校正装置及其参数的确定
1 1 K T1 T2
图中 1 T , 2 T 1 2
1
1
三阶系统的静态加速度误差系数为 K a K
动态性能与 c 及中频段宽度 h
2 有关。 1
在中频段宽度h一定的情况下系 统可能获得的最大相角裕度为 h 1 arcsin h 1
1
2 2h c , 2 c h 1 h 1
T2 10 2
求校正前的Lo( ’c ),故校正装置对应的 Lc ( ’c )= -Lo (’ c ) 由于’c在超前部分的两个转折频率1/T1和β/T1之间 所以必有20lg>Lo(’c),由此确定合适的β值。 5.确定滞后超前校正装置的超前部分 校正装置在新的幅值穿越频率 ’c处对应幅值为Lc( ’c),通过 点(’c,Lc(’c))画一条斜率为+20 dB/dec的斜线,此斜线便是超 前部分对应的幅频特性渐近线。 超前部分+20 dB/dec的渐近线与-20lg dB线的交点对应的是超 前部分的第一个转折频率1/T1,与0dB线的交点对应的是超前部分的第 二个转折频率β/T1。由两个交点可以确定超前部分。 6.画出校正后系统波特图,验算相位裕量,如不满足要求,可增大β 或进一步左移’c重新计算,直到满足要求。 7.校验性能指标,直到满足全部性能指标,最后用网络实现校正装 置,计算校正装置参数。
四、性能指标之间的转换
五、期望法校正的一般步骤
1.绘制系统校正前的对数幅频特性。 2.根据系统稳态性能要求,绘制系统校正后的对数幅频特性的低 频段。 3.根据系统动态性能要求,绘制系统校正后的对数幅频特性的中 频段。 4.为保证系统的抗干扰性能,系统校正后的对数幅频特性高频段 应该迅速衰减;同时为使校正装置易于实现,高频段应尽量等于或 平行于校正前的高频段,并应充分利用校正对象的零极点,使期望 特性的某些转折频率与校正前系统对数幅频特性的部分转折频率相 同。 5.绘制期望特性的低中频连接线与高中频连接线,一般取斜率为 -40dB/dec,综合考虑原系统的特性绘制出系统的期望对数频率特性 。 6.将期望对数频率特性减去未校正系统的频率特性,可得串联校 正装置的频率特性。 7.求出校正装置的传递函数,校验动态与稳态性能指标;若不满 足,可以再次增加中频段宽度或减小幅值穿越频率,重新设计。
值,则校正装置的传递函数为
Gc ( s )
6. 校验校正后系统的相位裕量和其余性能指标。如不 满足要求,可增大△从步骤(3)重新计算,直到满足要 求。 7. 校验性能指标,直到满足全部性能指标,最后用电 网络实现校正装置,计算校正装置参数。