第7章 补充01—传递矩阵法
《动力学分析中的传递矩阵法》

三、传递矩阵法应用举例
3.2 输液管道的传递矩阵法
横向振动微分方程:
直管横向运动的单元传递矩阵
4 4矩阵
三、传递矩阵法应用举例
3.2 输液管道的传递矩阵法
同时考虑直管单元的轴向振动和横向振动,则单元的场 传递矩阵为:
8 8矩阵
三、传递矩阵法应用举例
3.2 输液管道的传递矩阵法
弯曲处的点传递矩阵为:
2 2u 2 u a t 2 x 2
分离变量,将偏微分方程转化为常微分方程,求其通解
u( x, t ) U ( x)e it
U ( x) C cos x D sin x
由通解求出状态矢量中其他状态矢量。
Fu ( x) ES dU ( x) CES sin x DES cos x dx
三、传递矩阵汇报提纲
一、传递矩阵法原理 二、传递矩阵法计算步骤
三、传递矩阵法应用举例
一、传递矩阵法原理
传递矩阵法属于一种半解析数值方法。基本思想是把整体结 构离散成若干个子单元的对接与传递的力学问题,建立单元 两端之间的传递矩阵,利用矩阵相乘对结构进行静力及动力 分析。 其应用领域涵盖结构的静力分析、动力特性分析(模态分析 、稳定性分析)。 传递矩阵法具有力学概念清晰,逻辑性强,建模灵活,计算效 率高,无需建立系统的总体动力学方程等优点,尤其是可以方 便地进行输流管道系统受迫振动响应的计算。
对于管单元i左侧节点而言,x=0。
U ( x) C [ B ( x 0)]1 D Fu ( x) L
对于管单元i右侧节点而言,x=l。
U ( x) C [ B( x l )] F ( x) R D u
桥梁结构分析的传递矩阵法及其应用

桥梁结构分析的基本方程
01
02
03
静力平衡方程
描述桥梁结构在静力作用 下的平衡状态,是结构分 析的基础。
动力学方程
描述桥梁结构在动力作用 下的响应,包括地震、风 等自然力作用下的振动。
弹性力学方程
描述桥梁结构的应力和应 变关系,是结构分析的核 心。
பைடு நூலகம்
桥梁结构分析的边界条件与初始条件
边界条件
约束桥梁结构的位移、转角等物理量,如在固定支撑处、自 由支撑处等。
初始条件
描述桥梁结构的初始状态,如温度、湿度等环境因素对结构 的影响。
03 传递矩阵法的原 理
传递矩阵法概述
传递矩阵法是一种用于分析桥 梁结构动力特性的数值方法。
它基于牛顿运动定律,通过建 立系统的传递矩阵来描述结构 在受到外部激励时的响应。
传递矩阵法适用于分析复杂桥 梁结构,如连续梁桥、拱桥等 。
02
利用特征向量和特征值,计算 结构的响应,如位移、速度和 加速度等。
03
根据计算结果进行结构的安全 性评估和优化设计。
04 传递矩阵法在桥 梁结构分析中的 应用
桥梁结构模型的离散化
梁单元离散化
将桥梁结构划分为多个梁单元 ,每个梁单元由有限元模型进 行模拟,考虑其弯曲、剪切、
轴向等变形。
节点位移自由度
桥梁结构分析的传递矩阵法 及其应用
2023-11-10
目 录
• 引言 • 桥梁结构分析的基本理论 • 传递矩阵法的原理 • 传递矩阵法在桥梁结构分析中的应用 • 传递矩阵法的优化与拓展 • 结论与展望
01 引言
研究背景与意义
背景
桥梁结构分析是桥梁设计和维护的重要环节,随着科技的发展,对结构分析的准确性和效率要求也越来越高。
TransferMatrixMethod:传递矩阵法
Transfer Matrix MethodG.Eric Moorhouse,University of WyomingReference:Transfer Matrix MethodI.M.Gessel and R.P.Stanley,‘Algebraic Enu-meration’,in Handbook of Combinatorics Vol.2, ed.R.L.Graham et al.,Elsevier,1995,pp.1021–1061.References:Dimensions of CodesN.Hamada,‘The rank of the incidence matrixof points and d-flats infinite geometries’,J. Sci.Hiroshima Univ.Ser.A-I32(1968),381–396.M.Bardoe and P.Sin,‘The permutation mod-ules for GL(n+1,q)acting on P n(q)and F n+1q’,to appear in JLMS./~sin/preprints/hamada.dviG.E.Moorhouse,‘Dimensions of Codes from Finite Projective Spaces’(as html and as Maple worksheet)/~moorhous/src/hamada.html /~moorhous/src/hamada.mwsProblem1Let S k be the set of‘words’of length k consist-ing of‘a’s and‘b’s,with no two consecutive ‘b’s.Determine F k=|S k|.F0=1‘’F1=2‘a’‘b’F2=3‘aa’‘ab’‘ba’F3=5‘aaa’‘aab’‘aba’‘baa’‘bab’F4=8‘aaaa’‘aaab’‘aaba’‘abaa’‘abab’‘baaa’‘baab’‘baba’etc.This gives all but thefirst term of the Fibonacci sequence1,1,2,3,5,8,13,21,34,55,89,144,...To find a formula for F k ,we work instead with the generating function∞k =0F k t k =1+2t +3t 2+5t 3+8t 4+13t 5+···Observe that words w ∈S k correspond to paths of length k ,starting at vertex 1in the digraph12..................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................append ‘a’append ‘a’append ‘b’Words not ending in ‘b’Words ending in ‘b’Agenda1.Motivating Problem1(above)2.Counting Walks by the Transfer Matrix Method3.Application to Problem14.Counting Closed Walks5.Counting Weighted Walks in Digraphs withWeighted Edges6.MAPLE Worksheet for Problem17.Application to Coding TheoryThe Transfer Matrix Method Let D be a digraph (directed graph),possibly with loops,having vertices 1,2,3,...,n .Let A =[a ij :1≤i,j ≤n ]be the adjacency matrix of D ;in other words,a ij = 1,if (i,j )is an edge of D ;0,otherwise.A walk of length k in D is a sequence......................................................................................................................................................................................................................................................................................................................................···◦◦◦◦i 0i 1i 2i k→→→→of (not necessarily distinct)vertices such that each ...........................................................................................◦◦i r −1i r →is an edge of D .Counting Walks from i to jLet w ij(k)be the number of walks of length k from vertex i to vertex j in D.Then w ij(k)is the(i,j)-entry of A k.This is readily computed by reading offthe coefficient of t k in the gen-erating function k≥0w ij(k)t k which in turn is the(i,j)-entry of(I−tA)−1=I+tA+t2A2+t3A3+···. Since the(i,j)-entry of(I−tA)−1is of the formpoly.in t of degree≤n−1det(I−tA),w ij(k)satisfies a linear recurrencew ij(k+n)=n−1r=0c r w ij(k+r)for all k≥0where det(I−tA)=1−c n−1t−c n−2t2−···−c0t n.The initial conditions w ij(0),w ij(1),..., w ij(n−1)depend on i and j but the recurrence does not.Counting All WalksLet w(k)= n i=1 n j=1w ij(k),the total num-ber of walks of length k.This is the coefficient of t k in the sum of the entries of(I−tA)−1.In particular w(k)satisfies the same recurrence as the w ij(k)’s:w(k+n)=n−1r=0c r w(k+r)for all k≥0but with different initial conditions.Counting Closed WalksLet w closed(k)= n i=1w ii(k),the total number of closed walks of length k(i.e.starting and ending at the same vertex).This is the coef-ficient of t k in trace((I−tA)−1).In particular w closed(k)satisfies the same linear recurrence as the w ij(k)’s and w(k),but again with different initial conditions.Here we assumed the initial/final vertex to be distinguished,i.e.the walks(i0,i1,i2,...,i k)and (i1,i2,...,i k,i0)are counted as distinct unless all i0=i1=···=i k.ExampleLet F k be the number of‘words’of length k consisting of‘a’s and‘b’s,with no two con-secutive‘b’s.F0=1‘’F1=2‘a’‘b’F2=3‘aa’‘ab’‘ba’F3=5‘aaa’‘aab’‘aba’‘baa’‘bab’F4=8‘aaaa’‘aaab’‘aaba’‘abaa’‘abab’‘baaa’‘baab’‘baba’etc.This gives all but thefirst term of the Fibonacci sequence1,1,2,3,5,8,13,21,34,55,89,144,...Observe that F k is the number of paths of length k ,starting at vertex 1in the digraph12.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................append ‘a’append ‘a’append ‘b’Words not ending in ‘b’Words ending in ‘b’A = 111(I −tA )−1=11−t −t 2 1t t 1−tk ≥0F k t k =sum of (1,1)-and (1,2)-entries of (I −tA )−1=1+t 1−t −t 2=1√5 α21−αt −β21−βt=1√5 k ≥0(αk +2−βk +2)t k where α=(1+√5)/2,β=(1−√5)/2.From (1−t −t 2) k ≥0F k t k =1+t we obtainF k = 1,if k =0;2,if k =1;F k −1+F k −2,if k ≥2so by induction,F k is the (k +1)st Fibonacci number.From the series expansion we obtain the explicit formulaF k =αk +2−βk +2√5for k ≥0.Wraparound VersionLet L k(for k≥0)be the number of‘words’of length k consisting of‘a’s and‘b’s with no consecutive‘b’s,and which do not both start and end with‘b’.For technical reasons we will take L0=2.For k≥2,we are simply counting necklaces with a mber and b lack beads having no two consecutive black beads;however,each neck-lace has a distinguished starting point(a knot in its cord)and a distinguished direction(clock-wise or counter-clockwise).L1=1‘a’L2=3‘aa’‘ab’‘ba’L3=4‘aaa’‘aab’‘aba’‘baa’L4=7‘aaaa’‘aaab’‘aaba’‘abaa’‘abab’‘baaa’‘baba’These are the familiar Lucas numbers which satisfy the same recurrence relation as the Fi-bonacci numbers,but a different initial condi-tion.Note that L k is the number of closed walks of length k in our digraph.k ≥0L k t k =trace ((I −tA )−1)=2−t 1−t −t 2=11−αt +11−βt=k ≥0(αk +βk )t kFrom (1−t −t 2) k ≥0L k t k =2−t we obtainL k = 2,if k =0;1,if k =1;L k −1+L k −2,if k ≥2From the series expansion we obtain the ex-plicit formulaL k=αk+βk for k≥0.Counting Walks with Weighted Edges As before,D is a digraph (directed graph),pos-sibly with loops,having vertices 1,2,3,...,n .Assign a weight to each edge:...........................................................................................◦◦i j →a ij (Non-edges have weight zero.)Define the weight of a walk......................................................................................................................................................................................................................................................................................................................................···◦◦◦◦i 0i 1i 2i k →→→→a i 0i 1a i 1i 2a i 2i 3a i k −1i k of length k to be the producta i 0i 1a i 1i 2a i 2i 3···a i k −1i k .Let A =[a ij :1≤i,j ≤n ].Thenw ij(k):=The sum of all weightsof walks in D of length k from vertex i to vertex j=(i,j)-entry of A khas generating function k≥0w ij(k)t k equal to the(i,j)-entry of(I−tA)−1=I+tA+t2A2+t3A3+···as before.ExampleWe have determined the number F k of words of length k consisting of‘a’s and‘b’s,with no two consecutive‘b’s.How many such words contain r‘a’s and(therefore)k−r‘b’s?12.................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................a ab A = a b a0 (I −tA )−1=11−at −abt 2 1bt at 1−atThe sum of the (1,1)-and (1,2)-entries is1+bt1−at −abt 2=1+(a +b )t +(a 2+2ab )t 2+(a 3+3a 2b +ab 2)t 3+(a 4+4a 3b +3a 2b 2)t 4+···Thus,for example,among the F 4=8words of length 4,1has 4‘a’s and 0‘b’s;4have 3‘a’s and 1‘b’;3have 2‘a’s and 2‘b’s.Codes from Finite GeometryConsider the projective plane of order 2:•••••••a bc d e f g ..........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................The binary code of this geometry is the sub-space C ≤F 7(where F ={0,1}mod 2)spanned by the lines:a b c d e f g a b c d e f g C ={0000000,1111111,1101000,0010111,0110100,1001011,0011010,1100101,0001101,1110010,1000110,0111001,0100011,1011100,1010001,0101110}|C|=24;dim C =4The code above is the 1-error correcting binary Hamming code of length 7.The projective plane is constructed from F 3by taking as points and lines the 1-and 2-dimensional subspaces of F 3.•••••••001010100011110111101.........................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................................Codes of Finite Projective SpacesLet F be thefield of order p e,p prime.Pro-jective n-space over F has as its points,lines, etc.the subspaces of F n+1of dimension1,2, etc.Problem:Compute the dimension of the code C=C n,p,e,k spanned by the subspaces of codi-mension k.Solution by Hamada’s Formula(the follow-ing theorem)is usually computationally infea-sible.Solution by the Transfer Matrix MethodTheorem(Bardoe and Sin,1999)Define M(t)=(1+t+t2+···+t p−1)n+1.Let D=D n,p,e,k be the digraph with vertices 1,2,...,k,and the edge from vertex i to vertex j has weight equal to the coefficient of t pj−i in M(t).Thendim C n,p,e,k=1+sum of weights of closed walks of length ein D=1+ coeff.of t ein tr[(I−tA)−1]where A is the k×k matrix whose(i,j)-entry is the weight of edge(i,j)(defined above).Example:Projective Plane of Order2C=binary code spanned by the seven lines (subspaces of codimension k=1)M(t)=(1+t)3=1+3t+3t2+t3A=[3](coefficient of t1in M(t))(I−tA)−1= 1 1−3ttr[(I−tA)−1]=11−3t=1+3t+9t2+27t3+···dim C=1+3=4。
第7章new传递函数矩阵的矩阵分式描述和结构特性更新中
2
s 3
s 1 s3 s3 s4
s
s
s
2
s 1
解 首先构造G(s) 的右MFD。为此,定出G(s)各列的最小公分母如下: dc1(s) = (s+2)(s+3)2 , dc2(s) = (s+3)(s+4) ,dc3(s) = (s+1)(s+2)
由此可以导出G(s)的右MFD为
G(s) Nr (s)Dr1(s)
Nr(s) = Qr(s)Dr(s) + R(s)
(7-31)
且 R(s)Dr-1(s) 是严真性有理矩阵,或者说在Dr(s)为列既约条件下
δcj R(s) < δcj Dr(s),
j=1,2,…,m
(7-32)
定理7-4的对偶定理 设Nl(s)和Dl(s)是两个r×m和r×r阶多项式矩阵,且
Dl(s)非奇异,则存在唯一的 r×m 阶多项式矩阵Ql(s)和L(s)使得
1 右MFD和左MFD 考虑p维输入和q维输出的连续线性时不变系统,其输入输出关系的传递
函数矩阵G(s)为q×p有理分式矩阵,其表示形式为
n11 ( s) d11 ( s)
n1p (s)
d1
p
(s)
G(s)
nq1
(
s)
nqp
(s)
dq1(s)
dqp (s)
(7 1)
严格真有理矩阵:有理矩阵 G(s) 满足 G(∞) = 0。 真有理矩阵:有理矩阵 G(s) 满足 G(∞) = G0 (非零常数)。
(6-2)
右分母矩阵: p×p 阶方阵Dr(s);右分子矩阵: q×p 阶矩阵Nr(s); 左分母矩阵: q×q 阶方阵Dl(s); 左分子矩阵: q×p 阶矩阵Nl(s)。
传递矩阵法

传递矩阵法是研究转子系统动力学问题的有效手段。
传递矩阵法还具有其它方法(如摄动有限元素法)无法比拟的优点,例如,在做转子系统的临界转速、阻尼固有频率和稳定性计算分析时,由于流体密封交叉刚度、油膜轴承、阻尼项往往是不对称的,再加上陀螺力矩的影响;这样,用随机有限元素法形成的单元刚度矩阵和系统总体刚度矩矩阵往往也是不对称的,阻尼也不可以简单地以小阻尼或比例阻尼系统来替代,求解这样一个非对称系统的复特征值问题,目前还没有一个较为理想的方法。
而传递矩阵法没有随机有限元法在求解这些的问题时带来的这些困难。
因此,传递矩阵法在转子系统动力学问题的研究中占有主导的地位。
现代控制理论-传递矩阵
λi Pi = APi
称pi为特征向量。
4. 4 状态方程的线性变换
选取不同的状态变量有不同形式的状态方程, 两组状态变量之间存在着线性变换。
x& = Ax + bu y = cx
x = px
x& = Ax + bu y = cx
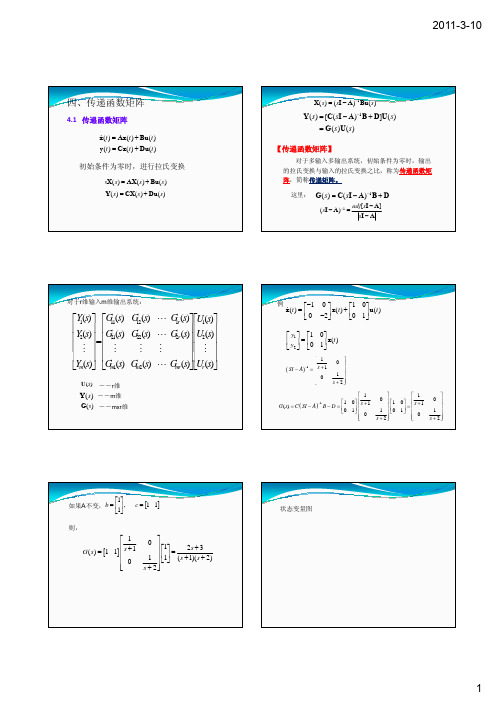
= G(s)U(s) 【传递函数矩阵】
对于多输入多输出系统,初始条件为零时,输出 的拉氏变换与输入的拉氏变换之比,称为传递函数矩 阵,简称传递矩阵。
这里: G(s) = C(sI − A)−1B + D
(sI − A)−1 = adj[sI − A] sI − A
对于r维输入m维输出系统:
⎡Y1(s)⎤ ⎡G11(s) G12(s) L G1r(s)⎤⎡U1(s)⎤
b) 若A阵为友矩阵,且有n个互不相同的实数特 征值λi
⎡0 1 0 L 0 ⎤
⎢ ⎢
0
01
⎥ ⎥
A=⎢ ⎢ ⎢
O
⎥
1
⎥ ⎥
⎢⎣−a0 −a1 L
−an−1 ⎥⎦
sI − A = 0
λi
3
2011-3-10
则下边的范德蒙特矩阵使A对角化
⎡1 1 L 1⎤
⎢ ⎢
λ1
λ2
L
λn
⎥ ⎥
P
=
⎢ ⎢ ⎢
λ12 M
P变换,
变换矩阵: p = [ p1 p2 L pn ]
x = px x& = px& = Ax + bu = Apx + bu
x& = p−1Apx + p−1bu = Ax + bu
传递矩阵法matlab程序
传递矩阵法matlab程序传递矩阵法是一种用于计算机程序中传递和操作矩阵的方法,在Matlab中,它被广泛应用于矩阵运算和数据处理等领域。
本文将介绍传递矩阵法的原理和在Matlab中的具体实现。
传递矩阵法是一种通过矩阵传递来操作数据的方法。
它的基本原理是将需要进行操作的数据存储在矩阵中,然后通过矩阵的传递,实现对数据的处理和计算。
这种方法的优势在于可以利用矩阵的高效运算能力,简化程序的编写和调试过程。
在Matlab中,可以使用矩阵操作函数来实现传递矩阵法。
例如,可以使用矩阵的乘法运算来实现矩阵的传递。
假设我们有两个矩阵A 和B,我们希望将矩阵A的数据传递给矩阵B,可以使用如下的Matlab代码实现:```B = A;```这样,矩阵B就完全复制了矩阵A的数据。
通过这种方式,我们可以在程序中传递矩阵,进行各种操作和计算。
除了简单的传递,传递矩阵法还可以实现更复杂的操作。
例如,可以通过传递矩阵进行矩阵的相加、相减、相乘等运算。
假设我们有两个矩阵A和B,我们希望将它们相加得到矩阵C,可以使用如下的Matlab代码实现:```C = A + B;```这样,矩阵C的每个元素都等于矩阵A和矩阵B对应元素的和。
通过传递矩阵法,我们可以很方便地实现这样的矩阵运算。
除了矩阵的运算,传递矩阵法还可以用于数据处理和分析。
例如,可以通过传递矩阵来实现数据的转置、截取、排序等操作。
假设我们有一个矩阵A,我们希望将它的每一列按照从大到小的顺序进行排序,可以使用如下的Matlab代码实现:```B = sort(A,'descend');```这样,矩阵B的每一列都按照从大到小的顺序进行了排序。
通过传递矩阵法,我们可以在Matlab中进行各种复杂的数据处理和分析。
传递矩阵法在Matlab中的应用非常广泛。
无论是矩阵运算、数据处理还是图像处理,都可以通过传递矩阵法来实现。
它不仅提高了程序的效率和可读性,还简化了程序的编写和调试过程。
利用传递矩阵法和Riccati传递矩阵法分析转子临界转速
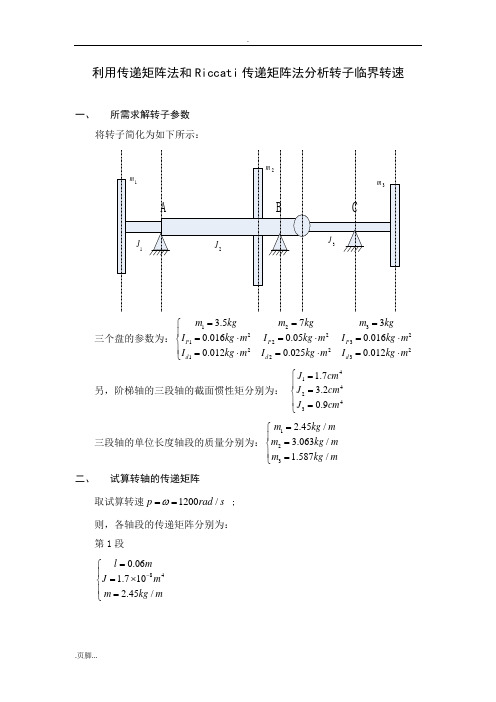
利用传递矩阵法和Riccati 传递矩阵法分析转子临界转速一、所需求解转子参数将转子简化为如下所示:三个盘的参数为:1232221232221230.0160.050.0160.0120.0250.012P P P d d d I kg m I kg m I kg m I kg m I kg m I kg m ⎪=⋅=⋅=⋅⎨⎪=⋅=⋅=⋅⎩ 另,阶梯轴的三段轴的截面惯性矩分别为: 414243 1.73.20.9J cm J cm J cm ⎧=⎪=⎨⎪=⎩三段轴的单位长度轴段的质量分别为:1232.45/3.063/1.587/m kg m m kg m m kg m =⎧⎪=⎨⎪=⎩二、 试算转轴的传递矩阵取试算转速1200/p rad s ω== ; 则,各轴段的传递矩阵分别为: 第1段840.061.7102.45/l m J m m kg m -=⎧⎪=⨯⎨⎪=⎩1 1.0006e+000 6.0007e-002 5.2943e-007 1.0588e-008 3.7356e-002 1.0006e+000 1.7649e-005 5.2943e-007 6.3506e+003 1.2701e+002 1.0006e+000 6.0007e-002 2.1170e+005 6.3506e+003 3.7356e-002 H = 1.0006e+000⎧⎪⎪⎨⎪⎪⎩ 第2段840.153.2103.063/l m J m m kg m -=⎧⎪=⨯⎨⎪=⎩2 1.0145e+000 1.5044e-001 1.7595e-006 8.7927e-008 3.8782e-001 1.0145e+000 2.3506e-005 1.7595e-006 4.9669e+004 2.4821e+003 1.0145e+000 1.5044e-001 6.6353e+005 4.9669e+004 3.8782e-001 H = 1.0145e+000⎧⎪⎪⎨⎪⎪⎩ 第3段840.053.2103.063/l m J m m kg m -=⎧⎪=⨯⎨⎪=⎩3 1.0002e+000 5.0002e-002 1.9531e-007 3.2552e-009 1.4358e-002 1.0002e+000 7.8128e-006 1.9531e-007 5.5135e+003 9.1890e+001 1.0002e+000 5.0002e-002 2.2054e+005 5.5135e+003 1.4358e-002 H = 1.0002e+000⎧⎪⎪⎨⎪⎪⎩ 第4段840.033.2103.063/l m J m m kg m -=⎧⎪=⨯⎨⎪=⎩4 1.0000e+000 3.0000e-002 7.0313e-008 7.0313e-010 3.1013e-003 1.0000e+000 4.6875e-006 7.0313e-008 1.9848e+003 1.9848e+001 1.0000e+000 3.0000e-002 1.3232e+005 1.9848e+003 3.1013e-003 H = 1.0000e+000⎧⎪⎪⎨⎪⎪⎩ 第5段840.10.9101.587/l m J m m kg m -=⎧⎪=⨯⎨⎪=⎩5 1.0053e+000 1.0011e-001 2.7788e-006 9.2607e-008 2.1163e-001 1.0053e+000 5.5614e-005 2.7788e-006 1.1430e+004 3.8094e+002 1.0053e+000 1.0011e-001 2.2877e+005 1.1430e+004 2.1163e-001 H = 1.0053e+000⎧⎪⎪⎨⎪⎪⎩ 第6段840.060.9101.587/l m J m m kg m -=⎧⎪=⨯⎨⎪=⎩6 1.0007e+000 6.0008e-002 1.0000e-006 2.0000e-008 4.5706e-002 1.0007e+000 3.3338e-005 1.0000e-006 4.1137e+003 8.2272e+001 1.0007e+000 6.0008e-002 1.3714e+005 4.1137e+003 4.5706e-002 H = 1.0007e+000⎧⎪⎪⎨⎪⎪⎩ 此6段传递矩阵均采用MATLAB 编程求解,MATLAB 的源文件为H.m 三、采用传递矩阵法进行各段轴的状态参数的传递初始参数列阵为:0101010120101012011Pd d X X I I p M p I Q mp x θθωθ⎛⎫⎛⎫ ⎪⎪ ⎪ ⎪ ⎪=⎛⎫ ⎪-- ⎪⎪ ⎪ ⎪⎝⎭⎝⎭ ⎪⎝⎭令011X =,则初始矩阵可化为:010*******.046e θθ⎛⎫⎪⎪ ⎪ ⎪⎝⎭以初始矩阵乘第一轴段的传递矩阵,则可得第一段轴的终端状态参数:1011011011010.06306+ 1.0541.102 +5890 3.0885 26566.0 5..7062556k k k k e e X M Q θθθθθ⎛⎫⎛⎫⎪ ⎪ ⎪ ⎪= ⎪ ⎪ ⎪ ++⎪⎝⎭⎝⎭由于考虑支座的支撑刚度系数变化从5101*101*10,先取51*10,那么100001000010001KK k⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥-⎣⎦,此处510k =,则可得支座A 后第2段的起始端参数阵为: 020102010201560201 0.06306 + 1.0541.102 + 5890.0 3.088*10260.2 5.149*2.01076X M Q θθθθθ⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪= ⎪ ⎪⎪ ++⎪⎝⎭⎝⎭用第2段的传递矩阵乘此矩阵,可得第2段终端参数:20120120120166 0.2402+ 2.4721.282 + 19.11900.0 1.147*1099133.0 6.170477*1k k k k X M Q θθθθθ⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪= ⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭++用中间圆盘的传递矩阵乘第2段终端参数阵,即可得第3段起始端参数:03010306103016307010.2402 + 2.472 1.282 + 1958022.0 1.848*102.52*10 3.11*10.47X M Q θθθθθ+⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪= ⎪ ⎪⎪ ⎭⎝⎭+⎪⎝ 用第3段传递矩阵乘其始端参数矩阵:'013'013'013'6356017 0.3238 + 3.9092.231+ 401.855*10 3.419*102.581*10 3.178*10.02k k k k X M Q θθθθθ⎛⎫⎛⎫ ⎪ ⎪⎪ ⎪= ⎪ ⎪⎪ ⎪⎪⎝⎭++⎝⎭ 用上式乘以支座刚度矩阵,得其终端参数:01305667130130130.3238 + 3.9092.231 + 40.01.855*10 3.419*102.549*10 3.1392*10k k k k X M Q θθθθθ⎛⎫⎛⎫⎪ ⎪⎪ ⎪= ⎪ ⎪⎪ ⎪ ⎝⎭⎭+⎪+⎝ 则,根据可得: ,则可得支座B 后第4段的起始端参数阵为:560104010401040104670.3238 + 3.9092.231 + 40.01.855*10 3.419*102.549*10 3.139*102X M Q θθθθθ⎛⎫⎛⎫ ⎪ ⎪⎪ ⎪= ⎪ ⎪⎪ ⎪⎪⎝⎭⎝++⎭ 同上,用此段轴的传递函数乘其起始端的状态参数,可得:4014014014015667 0.4056 + 5.372 3.281 + 582.626*10 4.369*102.597*10 3..172*20k k k k X M Q θθθθθ+⎛⎫⎛⎫⎪ ⎪ ⎪ ⎪= ⎪ ⎪⎪ ⎪⎝⎭⎝⎭+则,根据40k M =可得:01-16.64θ= 则,可得第5段的起始参数矩阵:050750505-1.3753.69601.12*10X M Q θ⎛⎫⎛⎫ ⎪ ⎪ ⎪ ⎪= ⎪ ⎪ ⎪ ⎭⎝-⎪⎝⎭ 其中,5θ为铰链处的转角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F i
第i-1个圆盘右侧到第 i 个圆盘右侧的状态变量传递关系:
2014年9月26日
F R P F R R X S S X S X 单元传递矩阵 Si SiP S 《振动力学》 i i i i i 1 i i 1
5
线性振动的近似计算方法 / 传递矩阵法
T
1 点传递矩阵 S 2 J i
0 1
第i个圆盘左右两侧状态变量的传递关系:
X iR SiP X iL
R L R k ( 第i个轴段上扭矩平衡条件: Ti L Ti 1 i i i 1 )
第i个轴段左右两端状态变量的传递关系: 场传递矩阵
2014年9月26日
1 1 / k i S 0 1 《振动力学》
F i
1 1 / ki T 0 T 1 i i 1
L
R
X iL SiF X iR 1
4
线性振动的近似计算方法 / 传递矩阵法 (i-1) li ki i Ji-1 (i)
(1)轴盘扭转振动系统
(2)梁的横向弯曲振动系统
2014年9月26日
《振动力学》
1
线性振动的近似计算方法 / 传递矩阵法
(1)轴盘扭转振动系统
(1) (2)
(3)
2 3
(n-2)
(n-1) n
(i-1) li ki i Ji-1
(i)
1
n-1
Ji
多盘扭振系统(n-1个盘) n-1个圆盘 轴不计质量,只计刚度
P i
2 J T i i
R
X iR SiP X iL
3
线性振动的近似计算方法 / 传递矩阵法 (i-1) li ki i Ji-1 (i)
i
Ti
L
iR 1
T
R i 1
iL
Ji
Ti R
第 i 个单元
Ji
P i
li ki
Ti L
状态变量: X ( , T )
假定梁上有 n-1 个集中质量
梁段质量不计,只计刚度
将支座、梁段、集中质量自左向右分别编号 第 i-1 个和第 i 个质量以及连接两质量的梁段构成第 i 个单元 第 i 个梁段长 li,抗弯刚度 EiIi,质量分别为mi-1、mi 状态变量构成: X ( y
M
Fs )T
集中质量处梁的横向位移、截面转角、弯矩和剪力
R
J2
J3
L
0 1 1 1 0 2 J
1 S 2 Ji
P i
X iR SiP X iL
2014年9月26日 《振动力学》
7
0 1
线性振动的近似计算方法 / 传递矩阵法
k1 k2 k
令: 1 1
i
Ti
L
iR 1
T
R i 1
iL
Ji
Ti R
第 i 个单元 定义状态变量: X ( , T )T
Ji
li ki
Ti L
:盘转角
T :盘侧面扭矩
定义:上角标 L 和 R 表示盘的左侧和右侧截面
R L 第i个圆盘两侧的状态变量满足: i i
Ti R Ti L J i i
i
( 0)
1
(1)
2
( 2)
3
(3)
(n 2)
(n 1) ( n )
(i 1)
(i )
n 1
n
mi 1
mi
li Ei I i
第 i 个梁段受力分析 平衡条件: F F
L s ,i R s ,i 1
第 i 个单元
li
y
R M iL M iR F 1 s ,i 1li
M iL
4
代入各单元状态的第一个元素,得模态:
1 φ(1) 1 1 1 φ( 2) 0 《振动力学》 1
1 0 2 k / J 3 2k / J
φ(3)
2014年9月26日
1 1 1
2014年9月26日 《振动力学》 10
线性振动的近似计算方法 / 传递矩阵法
( 0)
1
(1)
2
( 2)
3
(3)
(n 2)
(n 1) ( n )
(i 1)
n 1
n
mi 1
i
(i )
mi
li Ei I i
第 i 个单元 第 i 个质量受力分析
y y R L L M i i i 第 i 个质量两侧满足: R L M M i i F R F L m s ,i i yi s ,i
J1 J 2 J
1 T 1 0
R
L
J3 2J
k1
R
两端边界条件: T1L T3R 0
1 T 2 J 1
k2
J1
J2
J3
1 2 J 1 1 1 R k k X2 、X 3R: 2 T 2 J J J 2 2 2 2 2 2 J 1 J (2 3) k k 2 J J 4 2 1 J 2 2 4 1 R 1 1 k k k k 4 T 4 J 2 J 3 2 2 J 1 2 2 J 2 J (2 2 J 3) 2 2 J 3 2) k k k k
线性振动的近似计算方法 / 传递矩阵法
• 传递矩阵法
传递矩阵法适用于计算链状结构的固有频率和主振型
多个圆盘的扭振,连续梁,气轮机和发电机的转轴系统
特征:可简化为无质量的梁上带有若干个集中质量的横向振动 特点:将链状结构划分为一系列单元,每对单元之间的传递矩 阵的阶数等于单元的运动微分方程的阶数,因此传递矩阵法对 全系统的计算分解为阶数很低的各个单元的计算,然后加以综 合,从而大大减少计算工作量。
第 i-1 个圆盘右侧到第 i 个圆盘右侧的状态变量传递关系:
单元传递矩阵 Si SiP SiF
1 Si S S 2 J i
P i F i
R X iR SiP SiF X iR 1 Si X i 2 1 0 1 J i 1 2 ( J i / ki )
R i L i
FsL ,i
mi
M iR
FsR ,i L 2 FsR F m yi ,i s ,i i
点传递矩阵
0 1 0 0 0 0 1 0 0 y 0 0 M 1 Fs i 11
L
i 2 yi y 当系统以频率 作简谐振动时:
i
Ti
L
iR 1
T
R i 1
iL
Ji
Ti R
第 i 个单元 状态变量: X ( , T )T
Ji
P i
li ki
Ti L
1 点传递矩阵 S 2 J i
0 1
第i个圆盘左右两侧状态变量的传递关系: 第i个轴段左右两端状态变量的传递关系: 场传递矩阵
X iR SiP X iL X iL SiF X iR 1
k1 k2 k
J1 J 3 J
J 2 2J
J1
L 1 R 3
k1
k2
用传递矩阵法求固有频率和模态
解: 两端无约束,边界条件: T T 0
令: 1 1
1 第一个圆盘左端状态: T 0 1
1 第一个圆盘右端状态: T 2 J 1
9
线性振动的近似计算方法 / 传递矩阵法
(2)梁的横向弯曲振动系统
( 0)
1
R X iL 1 X i 1
X iL X iR
i
(1)
2
( 2)
3
(3)
(n 2)
(n 1) ( n )
(i 1)
(i )
n 1
n
mi 1
mi
li Ei I i
传递矩阵法可用于分析梁的横向弯曲振动
第 i 个单元
第 i 个单元
第 i-1 个和第 i 个圆盘以及连接两盘的轴段构成第 i 个单元 将圆盘和轴自左至右编号
Ji-1、 Ji:第 i-1 个圆盘和第 i 个圆盘的转动惯量
i 9月26日 2014年
ki:第 i 个单元轴段的扭转刚度 l :第 i 个单元轴段的长度 2 《振动力学》
线性振动的近似计算方法 / 传递矩阵法 (i-1) li ki i Ji-1 (i)
2 当圆盘以频率 作简谐振动时,有: i i
Ti R Ti L 2 J ii
1 0 T 1 i
L
第i个圆盘左右两侧状态变量的传递关系:
2014年9月26日
点传递矩阵
0 1 S 2 《振动力学》 J 1 i
线性振动的近似计算方法 / 传递矩阵法
设第 i 个梁段距离左端 x 远的截 面的弯矩、转角和挠度分别为: M i ( x),i ( x),yi ( x)
li
y
M iL
iL
FsR ,i 1
M iR 1 yiR 1
Mi ( x) M
R i 1
F
R s ,i 1
第 i 个圆盘左右两侧状态变量的传递关系: X iR SiP X iL 第 i 个轴段左右两端状态变量的传递关系: X iL SiF X iR 1