三点求曲率半径
高等数学第三章 第7节 曲率
3 2 2
6 (4 sin2 t 9 cos2 t )
3 2
(4 5 cos2 t )
3 2
3 2
要使 k 最大, 必有 (4 5 cos 2 t ) 最小,
3 t , 2 2
此时 k 最大,
18
练习题
一、填空题: 1 、曲率处处为零的曲线为________ ;曲率处处相等 的曲线为__________. 2 、抛 物 线 y x 2 4 x 3 在 (2,-1) 处 的 曲 率 为 ________;曲率半径为_________. 3 、曲 线 y ln( x 1 x 2 ) 在 (0,0) 处 的 曲 率 为 ___________. 二、求曲线 y ln(sec x ) 在点 ( x , y ) 处的曲率及曲率半 径. x a cos3 t t t 0 处的曲率 . 三、求曲线 在 3 y a sin t y2 x 四、证明曲线 y a cosh 在任何一点处曲率半径为 . a a
s
ds
存在的条件下, K
ds
.
6
注意(1)直线的曲率处处为零。
(2) 圆上各点处的曲率等于半径的 倒数,且半径越小曲率越大.
如图所示 , 有
s R 1 K lim s 0 s R
M s R M
可见: R 愈小, 则K 愈大 , 圆弧弯曲得愈厉害 ;
抛物线在顶点处的曲率 最大.
11
三、曲率圆与曲率半径
定义 设曲线 y f ( x ) 在点
y
D 1 k
M
y f ( x)
M ( x , y ) 处的曲率为k ( k 0). 在点 M 处的曲线的法线上 , 在凹的一侧取一点D, 使 DM
曲率半径
点击图片任意处播放\暂停
机动 目录 上页 下页 返回 结束
1 3 x 作缓和曲线, 例2. 我国铁路常用立方抛物线 y = 6 Rl 其中R是圆弧弯道的半径, l 是缓和曲线的长度, 且 l << R. 2 l 求此缓和曲线在其两个端点 O(0 , 0) , B (l , ) 处的曲率. 6R 解: 当 x ∈ [ 0 , l ] 时, y 1 2 l ≈0 ∵ y′ = x ≤ R 2 Rl 2R 1 B y′′ = x Rl o x l 1 x ∴ K ≈ y′′ = 1 3 Rl y= x 1 6 Rl 显然 K x = 0 = 0 ; K x =l ≈ R
1. 曲线在一点处的曲率圆与曲线有何密切关系? 答: 有公切线 ; 凹向一致 ; 曲率相同. 2. 求双曲线 x y = 1 的曲率半径 R , 并分析何处 R 最小? y 1 2 解: y′ = − 2 , y′′ = 3 , 则 x x 1 3 o 1 x 3 1) 2 2 2 (1 + 4 (1 + y′ ) 3 x 1 ( x2 + 1 ) 2 = R= =2 ≥ 2 2 2 x y′′ 3
机动 目录 上页 下页 返回 结束
⎧ x = a cos t (0 ≤ t ≤ 2π ) 在何处曲率最大? 例3. 求椭圆 ⎨ ⎩ y = b sin t
解: x = − a sin t ;
x = − a cos t
y = b cos t ;
故曲率为
y = −b sin t
x 表示对参 数 t 的导数
y
D(α , β ) R M ( x, y )
曲率与曲率半径问题(解析版)-高中数学

曲率与曲率半径问题1.(2024·浙江温州·二模)如图,对于曲线Γ,存在圆C满足如下条件:①圆C 与曲线Γ有公共点A ,且圆心在曲线Γ凹的一侧;②圆C 与曲线Γ在点A 处有相同的切线;③曲线Γ的导函数在点A 处的导数(即曲线Γ的二阶导数)等于圆C 在点A 处的二阶导数(已知圆x -a 2+y -b 2=r 2在点A x 0,y 0 处的二阶导数等于r 2b -y 03);则称圆C 为曲线Γ在A 点处的曲率圆,其半径r 称为曲率半径.(1)求抛物线y =x 2在原点的曲率圆的方程;(2)求曲线y =1x的曲率半径的最小值;(3)若曲线y =e x 在x 1,e x 1和x 2,e x 2x 1≠x 2 处有相同的曲率半径,求证:x 1+x 2<-ln2.【解析】(1)记f x =x 2,设抛物线y =x 2在原点的曲率圆的方程为x 2+y -b 2=b 2,其中b 为曲率半径.则f x =2x ,f x =2,故2=f0 =b 2b -03=1b ,2=r 2b 3,即b =12,所以抛物线y =x 2在原点的曲率圆的方程为x 2+y -122=14;(2)设曲线y =f x 在x 0,y 0 的曲率半径为r .则法一:f x 0 =-x 0-ay 0-bfx 0 =r 2b -y 03,由x 0-a 2+y 0-b 2=r 2知,fx 0 2+1=r 2y 0-b 2,所以r =fx0 2+132f x 0,故曲线y =1x在点x 0,y 0 处的曲率半径r =-1x 202+1 322x 30,所以r 2=1x 40+132x 302=14x 20+1x 23≥2,则r 23=2-23x 20+1x 20≥213,则r =12x 20+1x 232≥2,当且仅当x 20=1x 20,即x 20=1时取等号,故r ≥2,曲线y =1x在点1,1 处的曲率半径r =2.法二:-1x 20=-x 0-a y 0-b 2x 30=r 2b -y 0 3,a +bx 20-2x 0x 40+1=r ,所以y 0-b =-x 0⋅r 23213x 0-a =-r 23213x 0,而r 2=x 0-a 2+y 0-b 2=x 20⋅r 43223+r 43223⋅x 20,所以r 23=2-23x 20+1x 20,解方程可得r =12x 20+1x 2032,则r 2=14x 20+1x 203≥2,当且仅当x 20=1x 20,即x 20=1时取等号,故r ≥2,曲线y =1x在点1,1 处的曲率半径r =2.(3)法一:函数y =e x 的图象在x ,e x 处的曲率半径r =e 2x+132e x,故r 23=e 43x +e-23x ,由题意知:e 43x1+e -23x 1=e43x 2+e-23x 2令t 1=e 23x1,t 2=e23x 2,则有t 21+1t 1=t 22+1t 2,所以t 21-t 22=1t 2-1t 1,即t 1-t 2 t 1+t 2 =t 1-t 2t 1t 2,故t 1t 2t 1+t 2 =1.因为x 1≠x 2,所以t 1≠t 2,所以1=t 1t 2t 1+t 2 >t 1t 2⋅2t 1t 2=2t 1t 2 32=2e x 1+x 2,所以x 1+x 2<-ln2.法二:函数y =e x 的图象在x ,e x 处的曲率半径r =e 2x+132e x,有r 2=e 2x +13e 2x=e 4x +3e 2x +3+e -2x令t 1=e 2x 1,t 2=e 2x 2,则有t 21+3t 1+3+1t 1=t 22+3t 2+3+1t 2,则t 1-t 2 t 1+t 2+3-1t 1t 2=0,故t 1+t 2+3-1t 1t 2=0,因为x 1≠x 2,所以t 1≠t 2,所以有0=t 1+t 2+3-1t 1t 2>2t 1t 2+3-1t 1t 2,令t =t 1t 2,则2t +3-1t2<0,即0>2t 3+3t 2-1=(t +1)22t -1 ,故t <12,所以e x 1+x 2=t 1t 2=t <12,即x 1+x 2<-ln2;法三:函数y =e x 的图象在x ,e x处的曲率半径r =e 2x +1 32e x.故r 23=e 43x +e23x 设g x =e 43x +e 23x ,则gx =43e 43x -23e -23x =23e -23x 2e 2x -1 ,所以当x ∈-∞,-12ln2 时g x <0,当x ∈-12ln2,+∞ 时g x >0,所以g x 在-∞,-12ln2 上单调递减,在-12ln2,+∞ 上单调递增,故有x 1<-12ln2<x 2,所以x 1,-ln2-x 2∈-∞,-12ln2 ,要证x 1+x 2<-ln2,即证x 1<-ln2-x 2,即证g x 2 =g x 1 >g -ln2-x 2 将x 1+x 2<-ln2,下证:当x ∈-12ln2,+∞ 时,有g x >g -ln2-x ,设函数G x =g x -g -ln2-x (其中x >-12ln2),则G x =g x +g -ln2-x =232e 2x -1 e 23x -2-13 ⋅e -43x >0,故G x 单调递增,G x >G -12ln2 =0,故g x 2 >g -ln2-x 2 ,所以x 1+x 2<-ln2.法四:函数y =e x 的图象在x ,e x 处的曲率半径r =e 2x+132e x,有r 2=e 2x +13e2x=e 4x +3e 2x +3+e -2x ,设h x =e 4x +3e 2x +3+e -2x .则有h x =4e 4x +6e 2x -2e -2x =2e -2x e 2x +1 22e 2x -1 ,所以当x ∈-∞,-12ln2 时h x <0,当x ∈-12ln2,+∞ 时h x >0,故h x 在-∞,-12ln2 上单调递减,在-12ln2,+∞ 上单调递增.故有x 1<-12ln2<x 2,所以x 1,-ln2-x 2∈-∞,-12ln2 ,要证x 1+x 2<-ln2,即证x 1<-ln2-x 2,即证h x 2 =h x 1 >h -ln2-x 2 .将x 1+x 2<-ln2,下证:当x ∈-12ln2,+∞ 时,有h x >h -ln2-x ,设函数H x =h x -h -ln2-x (其中x >-12ln2),则H x =h x +h -ln2-x =2e 2x -1 21+12e -2x +14e -4x >0,故H x 单调递增,故H x >H -12ln2 =0,故h x 2 >h -ln2-x 2 ,所以x 1+x 2<-ln2.2.有一种速度叫“中国速度”,“中国速度”正在刷新世界对中国高铁的认知.由于地形等原因,在修建高铁、公路、桥隧等基建中,我们常用曲线的曲率(Curvature )来刻画路线弯曲度.如图所示的光滑曲线C 上的曲线段AB ,设其弧长为Δs ,曲线C 在A ,B 两点处的切线分别为l A ,l B ,记l A ,l B 的夹角为ΔθΔθ∈0,π2,定义K =ΔθΔs为曲线段AB 的平均曲率,定义K (x )=lim Δx →0ΔθΔs=f (x )1+f (x ) 232为曲线C :y =f (x )在其上一点A (x ,y )处的曲率.(其中f (x )为f (x )的导函数,f (x )为f (x )的导函数)(1)若f (x )=sin (2x ),求K π4;(2)记圆x 2+y 2=2025上圆心角为π3的圆弧的平均曲率为a .①求a 的值;②设函数g (x )=ln (x +45a )-xe x -1,若方程g (x )=m (m >0)有两个不相等的实数根x 1,x 2,证明:x 2-x 1 <1-(5e -2)m3e -3,其中e 为自然对数的底数,e =2.71828⋯.【解析】(1)f (x )=sin (2x ),f (x )=2cos (2x ),f (x )=-4sin (2x ),所以f π4 =2cos π2=0,f π4 =-4sin π2=-4,因此K π4 =f π4 1+f π4 232=-4 1+0 32=4.(2)①由圆的性质知圆x 2+y 2=2025上圆心角为π3的圆弧的弧长为ΔS =π3⋅R .弧的两端点处的切线对应的夹角Δθ=π3,所以该圆弧的平均曲率K =Δθ ΔS=1R =12025=145,也即a =145.②由于a =145,故g x =ln x +1 -xe x -1,x ∈-1,+∞ ,又g (0)=0,g x =1x +1-x +1 e x -1,g x =-1x +12-x +2 e x -1<0,所以g (x )在-1,+∞ 上单调递减,而g 0 =1-1e >0,g 1 =12-2=-32<0.因此必存在唯一的x 0∈(0,1)使得g (x 0)=0且g (x )在-1,x 0 上为正,在x 0,+∞ 为负,即g (x )在-1,x 0 上单调递增,在x 0,+∞ 上单调递减,而g (0)=0,又g 12 =ln 32-12e>ln 32-13>0∵2e >3⇔e >94,ln 32>13⇔e 13<32⇔e <278,g (1)=ln2-1<0,所以∃t ∈12,1 使得g (t )=0,即g (x )的图象与x 轴有且仅有两个交点(0,0),(t ,0),易得g (x )在(0,0)处的切线方程为l 0:y =1-1e x =e -1ex ,在(t ,0)处的切线方程为l t :y =1t +1-t +1 e t -1 x -t ,下面证明两切线l 0,l t 的图象不在g (x )的图象的下方:令h x =g x -1t +1-t +1 e t -1 x -t =g (x )-g (t )(x -t ),则h (x )=g (x )-g (t ).因为h (x )=g (x )<0,所以h (x )在(-1,+∞)单调递减,而h (t )=0,所以h (t )在(-1,t )上为正,在(t ,+∞)为负,即h (x )在(-1,t )上单调递增,在(t ,+∞)单调递减,因此h (x )≤h (t )=g (t )-0=0,即g x ≤1t +1-t +1 e t -1 x -t ,即g (x )的图象恒在其图象上的点(t ,0)处的切线的下方(当且仅当x =t 时重合).同理可证(将t 视为0即可),g x ≤1-1ex设直线y =m (m >0)与两切线l 0,l 1交点的横坐标分别为X 0,X t ,则易得X 0=me e -1,X t =m1t +1-t +1 e t -1+t 且X 0<x 1<x 2<X t ,因为t ∈12,1,故1t +1-t +1 e t -1∈-32,23-32e⊆-32,0 ,所以X t =m 1t +1-t +1 e t -1+t <m -32+t <1-2m3,因此x 2-x 1 <X t -X 0<1-2m 3-mee -1=1-5e -2 m 3e -3.3.定义:若h (x )是h (x )的导数,h (x )是h (x )的导数,则曲线y =h (x )在点(x ,h (x ))处的曲率K =h (x )1+h(x ) 232;已知函数f (x )=e x sin π2+x,g (x )=x +(2a -1)cos x ,a <12,曲线y =g (x )在点(0,g (0))处的曲率为24;(1)求实数a 的值;(2)对任意x ∈-π2,0,mf (x )≥g (x )恒成立,求实数m 的取值范围;(3)设方程f (x )=g (x )在区间2n π+π3,2n π+π2n ∈N * 内的根为x 1,x 2,⋯,x n ,⋯比较x n +1与x n +2π的大小,并证明.【解析】(1)由已知g (x )=-2a -1 sin x +1,g (x )=-2a -1 cos x ,所以2a -1 1+12 32=24,解得a =0(a =1舍去),所以a =0;(2)由(1)得g (x )=x -cos x ,f (x )=e x sin π2+x=e x cos x ,则g x =1+sin x ,对任意的x ∈-π2,0,mf x -gx ≥0,即me x cos x -sin x -1≥0恒成立,令x =-π2,则m ⋅0+1-1=0≥0,不等式恒成立,当x ∈-π2,0时,cos x >0,原不等式化为m ≥sin x +1e x cos x ,令h x =sin x +1e x cos x,x ∈-π2,0 ,则hx =cos x e x cos x -e xcos x -sin x sin x +1 e x cos x2=1-sin x cos x -cos x +sin xe x cos 2x =1-cos x 1+sin x e x cos 2x≥0,所以h x 在区间-π2,0单调递增,所以h x max =h 0 =1,所以m ≥1,综上所述,实数m 的取值范围为1,+∞ ;(3)x n +1>x n +2π,证明如下:由已知方程f x =g x 可化为e x cos x -sin x -1=0,令φx =e x cos x -sin x -1,则φ x =e x cos x -sin x -cos x ,因为x ∈2n π+π3,2n π+π2,所以cos x <sin x ,cos x >0,所以φ x <0,所以φx 在区间2n π+π3,2n π+π2n ∈N * 上单调递减,故φ2n π+π3 =e 2n π+π3cos 2n π+π3 -sin 2n π+π3 -1=12e 2n π+π3-32-1≥12e 2π+π3-32-1>22×3+1×12-32-1>0,φ2n π+π2=-2<0,所以存在唯一x 0∈2n π+π3,2n π+π2,使得φx 0 =0,又x n ∈2n π+π3,2n π+π2 ,x n +1-2π∈2n π+π3,2n π+π2 ,则φx n +1-2π =e x n +1-2πcos x n +1-2π -sin x n +1-2π -1=e x n +1-2πcos x n +1-sin x n +1-1=ex n +1-2πcos x n +1-e x n +1cos x n +1=ex n +1-2π-ex n +1cos x n +1<0=φx n由φx 单调递减可得x n +1-2π>x n ,所以x n +1>x n +2π.4.(2024·湖北黄冈·二模)第二十五届中国国际高新技术成果交易会(简称“高交会”)在深圳闭幕.会展展出了国产全球首架电动垂直起降载人飞碟.观察它的外观造型,我们会被其优美的曲线折服.现代产品外观特别讲究线条感,为此我们需要刻画曲线的弯曲程度.考察如图所示的光滑曲线C :y =f x 上的曲线段AB ,其弧长为Δs ,当动点从A 沿曲线段AB 运动到B 点时,A 点的切线l A 也随着转动到B 点的切线l B ,记这两条切线之间的夹角为Δθ(它等于l B 的倾斜角与l A 的倾斜角之差).显然,当弧长固定时,夹角越大,曲线的弯曲程度就越大;当夹角固定时,弧长越小则弯曲程度越大,因此可以定义K =ΔθΔs为曲线段AB 的平均曲率;显然当B 越接近A ,即Δs 越小,K 就越能精确刻画曲线C 在点A 处的弯曲程度,因此定义K =lim Δ→0ΔθΔs=y1+y 232(若极限存在)为曲线C 在点A 处的曲率.(其中y ,y 分别表示y =f x 在点A 处的一阶、二阶导数)(1)已知抛物线x 2=2py (p >0)的焦点到准线的距离为3,则在该抛物线上点3,y 处的曲率是多少?(2)若函数g x =12x +1-12,不等式g e x +e -x 2 ≤g 2-cos ωx 对于x ∈R 恒成立,求ω的取值范围;(3)若动点A 的切线沿曲线f x =2x 2-8运动至点B x n ,f x n 处的切线,点B 的切线与x 轴的交点为x n +1,0 n ∈N * .若x 1=4,b n =x n -2,T n 是数列b n 的前n 项和,证明T n <3.【解析】(1)∵抛物线x 2=2py (p >0)的焦点到准线的距离为3,∴p =3,即抛物线方程为x 2=6y ,即f x =y =16x 2,则f x =13x ,f x =13,又抛物线在点3,y 处的曲率,则K =131+19⋅3232=1322=212,即在该抛物线上点3,y 处的曲率为212;(2)∵g -x =12-x +1-12=2x 2x +1-12=12-12x +1=-g x ,∴g x 在R 上为奇函数,又g x 在R 上为减函数.∴g e x +e -x 2≤g 2-cos ωx 对于x ∈R 恒成立等价于cos ωx ≥2-e x +e -x2对于x ∈R 恒成立.又因为两个函数都是偶函数,记p x =cos ωx ,q x =2-e x +e -x2,则曲线p x 恒在曲线q x 上方,p x =-ωsin ωx ,qx =-e x -e -x 2,又因为p 0 =q 0 =1,所以在x =0处三角函数p x 的曲率不大于曲线q x 的曲率,即p 0 1+p 20 32≤q 01+q 232,又因为p x =-ω2cos ωx ,qx =-e x +e -x 2,p 0 =-ω2,q 0 =-1,所以ω2≤1,解得:-1≤ω≤1,因此,ω的取值范围为-1,1 ;(3)由题可得f x =4x ,所以曲线y =f x 在点x n ,f x n 处的切线方程是y -f x n =f x n x -x n ,即y -2xn 2-8 =4x n x -x n ,令y =0,得-x n 2-4 =2x n x n +1-x n ,即x n 2+4=2x n x n +1,显然x n ≠0,∴x n +1=x n 2+2x n,由x n +1=x n 2+2x n ,知x n +1+2=x n 2+2x n +2=x n +2 22x n ,同理x n +1-2=x n -2 22x n,故x n +1+2x n +1-2=x n +2x n -22,从而lg x n +1+2x n +1-2=2lg x n +2x n -2,设lg x n +2x n -2=a n ,即a n +1=2a n ,所以数列a n 是等比数列,故a n =2n -1a 1=2n -1lg x 1+2x 1-2=2n -1lg3,即lg x n +2x n -2=2n -1lg3,从而x n +2x n -2=32n -1,所以x n =232n -1+132n -1-1,∴b n =x n -2=432n -1-1>0,b n +1b n =32n -1-132n-1=132n -1+1<132n -1≤1321-1=13,当n =1时,显然T 1=b 1=2<3;当n >1时,b n <13b n -1<13 2b n -2<13n -1b 1,∴T n =b 1+b 2+⋯+b n <b 1+13b 1+⋯+13 n -1b 1=b 11-13 n1-13=3-3⋅13n<3,综上,T n <3n ∈N * .5.(2024·高三·浙江宁波·期末)在几何学常常需要考虑曲线的弯曲程度,为此我们需要刻画曲线的弯曲程度.考察如图所示的光滑曲线C :y =f x 上的曲线段AB,其弧长为Δs ,当动点从A 沿曲线段AB运动到B 点时,A 点的切线l A 也随着转动到B 点的切线l B ,记这两条切线之间的夹角为Δθ(它等于l B 的倾斜角与l A 的倾斜角之差).显然,当弧长固定时,夹角越大,曲线的弯曲程度就越大;当夹角固定时,弧长越小则弯曲程度越大,因此可以定义K =ΔθΔs为曲线段AB 的平均曲率;显然当B 越接近A ,即Δs 越小,K 就越能精确刻画曲线C 在点A 处的弯曲程度,因此定义K =lim Δs →0ΔθΔs=y1+y 232(若极限存在)为曲线C 在点A 处的曲率.(其中y ',y ''分别表示y =f x 在点A 处的一阶、二阶导数)(1)求单位圆上圆心角为60°的圆弧的平均曲率;(2)求椭圆x 24+y 2=1在3,12处的曲率;(3)定义φy =22y1+y 3为曲线y =f x 的“柯西曲率”.已知在曲线f x =x ln x -2x 上存在两点P x 1,f x 1 和Q x 2,f x 2 ,且P ,Q 处的“柯西曲率”相同,求3x 1+3x 2的取值范围.【解析】(1)K =ΔθΔs=π3π3=1.(2)y =1-x 24,y=-x 41-x 24 -12,y =-141-x 24 -12-x 2161-x 24 -32,故y x =3=-32,y x =3=-2,故K =21+3432=16749.(3)fx =ln x -1,fx =1x ,故φy =22y 1+y 3=22x ln x 3=223s ln s3,其中s =3x ,令t 1=3x 1,t 2=3x 2,则t 1ln t 1=t 2ln t 2,则ln t 1=-t ln tt -1,其中t =t 2t 1>1(不妨t 2>t 1)令p x =x ln x ,p x =1+ln x ⇒p x 在0,1e 递减,在1e ,+∞ 递增,故1>t 2>1e>t 1>0;令h t =ln t 1+t 2 =ln t +1 -t ln tt -1,h 't =1t -1 2ln t -2t -1 t +1,令m (t )=ln t -2t -1 t +1(t >1),则m(t )=t -1 2t (t +1),当t >1时,m (t )>0恒成立,故m (t )在(1,+∞)上单调递增,可得m (t )>m (1)=0,即ln t -2t -1t +1>0,故有h t =1t -12ln t -2t -1 t +1>0,则h t 在1,+∞ 递增,又lim t →1h t =ln2-1,lim t →+∞h t =0,故ln t 1+t 2 ∈ln2-1,0 ,故3x 1+3x 2=t 1+t 2∈2e ,1.6.(2024·高三·辽宁·期中)用数学的眼光看世界就能发现很多数学之“美”.现代建筑讲究线条感,曲线之美让人称奇.衡量曲线弯曲程度的重要指标是曲率,曲线的曲率定义如下:若f x 是f x 的导函数,fx 是fx 的导函数,则曲线y =f x 在点x ,f x 处的曲率K =f (x )1+f (x ) 232.(1)求曲线f x =ln x +x 在1,1 处的曲率K 1的平方;(2)求余弦曲线h x =cos x (x ∈R )曲率K 2的最大值;【解析】(1)因为f x =ln x +x ,则f x =1x +1,f x =-1x 2,所以K 1=f 11+f 1 232=11+2232=1532,故K 1 2=15322=153=1125.(2)因为h x =cos x x ∈R ,则h x =-sin x ,h x =-cos x ,所以K 2=h x 1+hx 2 32=-cos x1+sin 2x 32,则K 22=cos 2x 1+sin 2x 3=cos 2x2-cos 2x3,令t =2-cos 2x ,则t ∈1,2 ,K 22=2-t t3,设p t =2-t t 3,则pt =-t 3-3t 22-t t 6=2t -6t 4,显然当t ∈1,2 时,p t <0,p t 单调递减,所以p (t )max =p 1 =1,则K 22最大值为1,所以K 2的最大值为1.7.曲线的曲率定义如下:若f '(x )是f (x )的导函数,f "(x )是f '(x )的导函数,则曲线y =f (x )在点(x ,f (x ))处的曲率K =|f "(x )|1+[f '(x )]232.已知函数f x =e x cos x ,g x =a cos x +x a <0 ,曲线y =g (x )在点(0,g (0))处的曲率为24.(1)求实数a 的值;(2)对任意的x ∈-π2,0,tf x -g x ≥0恒成立,求实数t 的取值范围;(3)设方程f x =g x 在区间2n π+π3,2n π+π2(n ∈N +)内的根从小到大依次为x 1,x 2,⋯,x n ,⋯,求证:x n +1-x n >2π.【解析】(1)由已知g (x )=-a sin x +1,g (x )=-a cos x ,,所以a 1+1232=24,解方程得a =-1(2)对任意的x ∈-π2,0,tf x -gx ≥0,即te x cos x -sin x -1≥0恒成立,令x =-π2,则t ⋅0+1-1≥0,不等式恒成立当x ∈-π2,0时,cos x >0,原不等式化为t ≥sin x +1e x cos x 令h x =sin x +1e x cos x,则hx =cos x e x cos x -e xcos x -sin x sin x +1 e x cos x2=1-sin x cos x -cos x +sin xe x cos 2x=1-cos x 1+sin xe x cos 2x所以h x 在区间-π2,0单调递增,所以最大值为h 0 =1所以要使不等式恒成立必有t ≥1(3)由已知方程f x =g x 可化为e x cos x -sin x -1=0令φx =e x cos x -sin x -1,则φ x =e x cos x -sin x -cos x因为x ∈2n π+π3,2n π+π2,所以cos x <sin x ,cos x >0所以φ x <0,φx 在区间2n π+π3,2n π+π2(n ∈N +)上单调递减,φ2n π+π3 =e 2n π+π3cos 2n π+π3 -sin 2n π+π3 -1=e 2n π+π312-32-1≥e 2π+π312-32-1>22⋅3+112-32-1>0φ2n π+π2=-2<0所以存在唯一x 0∈2n π+π3,2n π+π2,φx 0 =0x n ∈2n π+π3,2n π+π2 ,x n +1-2π∈2n π+π3,2n π+π2φx n +1-2π =e x n +1-2πcos x n +1-2π -sin x n +1-2π -1=e x n +1-2πcos x n +1-sin x n +1-1=ex n +1-2πcos x n +1-e x n +1cos x n +1=ex n +1-2π-ex n +1cos x n +1<0=φx n由φx 单调递减可得x n +1-2π>x n 即x n +1-x n >2π8.(2024·湖南永州·三模)曲线的曲率定义如下:若f (x )是f (x )的导函数,令φ(x )=f (x ),则曲线y =f (x )在点x ,f x 处的曲率K =φ (x )1+f (x ) 232.已知函数f (x )=x 2a +x (a >0),g (x )=(x +1)ln (x +1),且f (x )在点(0,f (0))处的曲率K =24.(1)求a 的值,并证明:当x >0时,f (x )>g (x );(2)若b n =ln (n +1)n +1,且T n =b 1⋅b 2⋅b 3⋯b n (n ∈N ∗),求证:(n +2)T n <e 1-n 2.【解析】(1)f ′(x )=2x a +1=φ(x ),φ′(x )=2a,f ′(0)=1,a >0,∵f (x )在点(0,f (0))处的曲率K =24,∴2a(1+12)32=24,解得a =2.当x >0时,h (x )=f (x )-g (x )=12x 2+x -(x +1)ln (x +1),h ′(x )=x +1-ln (x +1)-1=x -ln (x +1),令u (x )=x -ln (x +1),则u ′(x )=1-1x +1=xx +1>0,∴u (x )在x >0时单调递增,∴u (x )>u (0)=0,∴h ′(x )>0,∴函数h (x )在(0,+∞)上单调递增,∴h (x )>h (0)=0,因此f (x )>g (x ).(2)证明:由(1)可得:12x 2+x >(x +1)ln (x +1),∴ln (x +1)x +1<x (x +1)2(x +1)2,x >0,令x =n ∈N *,则:ln (n +1)n +1<n (n +2)2(n +1)2,∴T n =b 1⋅b 2⋅b 3⋅⋯⋅b n <12n ×1×322×2×432×3×542×4×652×⋯⋯×(n -1)(n +1)n 2×n (n +2)(n +1)2=12n ×12×n +2n +1要证明:(n +2)T n <e 1-n 2,只要证明:2ln (n +2)-(n +1)ln2-ln (n +1)-1+n2<0即可,n =1时,左边=2ln3-2ln2-ln2-12<0n ≥2时,令v (x )=2ln (x +2)-(x +1)ln2-ln (x +1)-1+x 2,v ′(x )=2x +2-ln2-1x +1+12=s (x ),s ′(x )=1(x +1)2-2(x +2)2=-x 2+2(x +1)2(x +2)2<0,∴v ′(x )<v ′(2)=23-ln2<0,∴v (x )在(2,+∞)上单调递减,∴v (x )<v (2)=4ln2-3ln2-ln3=ln2-ln3<0,综上可得:(n +2)T n <e1-n2成立.9.曲率是曲线的重要性质,表征了曲线的“弯曲程度”,曲线曲率解释为曲线某点切线方向对弧长的转动率,设曲线C :y =f x 具有连续转动的切线,在点x ,f x 处的曲率K =f x1+f x 232,其中f x为f x 的导函数,f x 为f x 的导函数,已知f x =x 2ln x -a 3x 3-32x 2.(1)a =0时,求f x 在极值点处的曲率;(2)a >0时,f x 是否存在极值点,如存在,求出其极值点处的曲率;(3)g x =2xe x -4e x +a 2x 2,a ∈0,1e,当f x ,g x 曲率均为0时,自变量最小值分别为x 1,x 2,求证:x1ex 2>e 2.【解析】(1)当a =0时,f x =x 2ln x -32x 2,x >0,可得f x =2x ln x +x -3x =2x (ln x -1),令f x =0,可得x =e ,当0<x <e 时,f x <0,当x >e 时,f x >0,所以当x =e 为f x 在极小值点,又f x =2ln x ,所以f e =2ln e =2,所以K =f e 21+f e 2232=2[1+02]32=2;(2)由f x =x 2ln x -a 3x 3-32x 2,可得f x =2x ln x +x -ax 2-3x =2x ln x -2x -ax 2,令h (x )=f x =2x ln x +x -ax 2-3x =2x ln x -2x -ax 2,则h x =2ln x -2ax ,令h x =0时,可得a =ln x x ,令φ(x )=ln x x ,可得φ (x )=1-ln xx 2,当0<x <e 时,φ x >0,φ(x )=ln xx 单调递增,当x >e 时,φ x <0,φ(x )=ln x x 单调递减,则φ(x )max =1e,所以0<a <1e时,f x =2ln x -2ax =0有解,且有两解x 1,x 3且1<x 1<e <x 3,x 1为f x 的极小值点,x 3为f x 的极大值点,当a =1e 时,f x =2ln x -2ax =0有解,且有唯一解,但此解不是f x 极值点,当a >1e时,f x =2ln x -2ax =0无解,所以f x 无极值点,所以当0<a <1e 时,f x 存在极值点,所以K =f x1+f x 2 32=0;(3)由题意可得g x =2xe x -4e x +a 2x 2,可得g x =2(x +1)e x -4e x +2ax ,要g x ,f x 曲率为0,则g x =f (x )=0,即2ln x -2ax =2a +2xe x =0,可得a =ln x x ,a 2=-xe x ,所以0<a <1e 时,φ(x )=ln xx有两解x 1,x 3,1<x 1<e <x 3,可证x 1x 3>e 2,由(2)可得ln x 1-ax 1=0,ln x 3-ax 3=0,可得ln x 1+ln x 3=ax 1+ax 3,ln x 1-ln x 3=ax 1-ax 3.要证明x 1x 3>e 2,即证明ln x 1+ln x 3>2,也就是a (x 1+x 3)>2.因为a =ln x 1-ln x 3x 1-x 3,所以即证明ln x 1-ln x 3x 1-x 3>2x 1+x 3,即ln x 1x 3<2(x 1-x 3)x 1+x 3,令x1x 3=t ,则0<t <1,于是ln t <2(t -1)t +1,令f (t )=ln t -2(t -1)t +1,则f(t )=1t -4(t +1)2=(t -1)2(t +1)2>0,故函数f (t )在(0,1)上是增函数,所以f (t )<f (1)=0,即ln t <2(t -1)t +1成立.所以x 1x 3>e 2成立.又因为a 2<a ,则-x 2e x 2=ln e-x2e-x 2<ln x 3x 3,由(2)可得φ(x )=ln xx在(e ,+∞)上单调递减,因为e -x 2>e ,x 3>e ,所以x 1ex 2=x 1e -x2>x 1x 3>e 2,10.用数学的眼光看世界就能发现很多数学之“美”.现代建筑讲究线条感,曲线之美让人称奇,衡量曲线弯曲程度的重要指标是曲率,曲线的曲率定义如下:若f x 是f x 的导函数,f x 是f x 的导函数,则曲线y =f x 在点x ,f x 处的曲率K =f x1+f x 232.(1)求曲线f x =ln x +x 在1,1 处的曲率K 1的平方;(2)求余弦曲线h x =cos x x ∈R 曲率K 2的最大值;(3)余弦曲线h x =cos x x ∈R ,若g x =e x h x +xh x ,判断g x 在区间-π2,π2上零点的个数,并写出证明过程.【解析】(1)因为f x =ln x +x ,所以f x =1x +1,f x =-1x2,所以K 1=f 11+f 1 232=11+2232=1532,∴K 1 2=15322=153=1125.(2)因为h x =cos x x ∈R ,h x =-sin x ,h x =-cos x ,所K 2=h x 1+h x 2 32=-cos x 1+sin 2x32,K 22=cos 2x 1+sin 2x 3=cos 2x 2-cos 2x3,令t =2-cos 2x ,则t ∈1,2 ,K 22=2-t t3,设p t =2-t t 3,t ∈1,2 ,则pt =-t 3-3t 22-t t 6=2t -6t4,显然当t ∈1,2 时,p t <0,p t 在1,2 上单调递减,所以p t max =p 1 =1,所以K 22最大值为1,所以K 2的最大值为1.(3)g x 在区间-π2,π2上有且仅有2个零点.证明:g x =e x cos x -x sin x ,所以g x =e x cos x -sin x -x cos x +sin x ,①当x ∈-π2,0时,因为cos x ≥0,sin x ≤0,则cos x -sin x >0,-x cos x +sin x >0,∴g x >0,g x 在-π2,0上单调递增,又g 0 =1>0,g -π2 =-π2<0.∴g x 在-π2,0上有一个零点,②设φx =e x -x ,则φ x =e x -1,当x ∈0,π4时,φx ≥0,φx 单调递增,φx =e x -x ≥φ0 =1,又cos x ≥sin x >0,∴g x =e x cos x -x sin x ≥e x sin x -x sin x =sin x e x -x >0恒成立,∴g x 在0,π4上无零点.③当x ∈π4,π2 时,0<cos x <sin x ,g x =e x cos x -sin x -x cos x +sin x <0,∴g x 在π4,π2 上单调递减,又g π2 =-π2<0,g π4 =22e π4-π4>0.∴g x 在π4,π2上必存在一个零点,综上,g x 在区间-π2,π2上有且仅有2个零点.。
物理方法求曲率半径
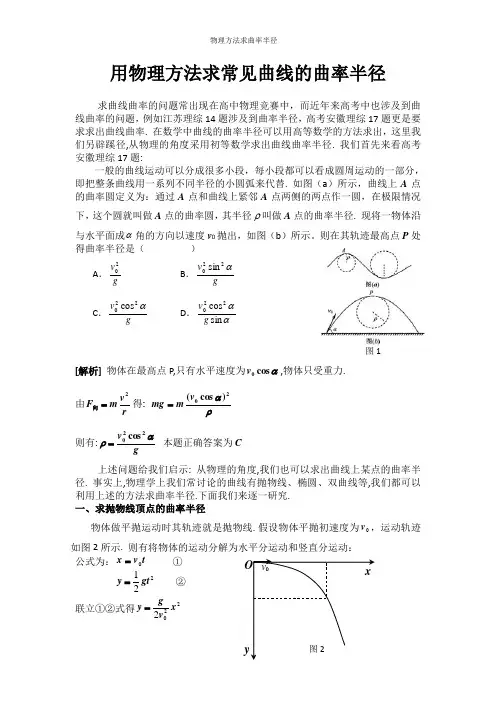
用物理方法求常见曲线的曲率半径求曲线曲率的问题常出现在高中物理竞赛中,而近年来高考中也涉及到曲线曲率的问题,例如江苏理综14题涉及到曲率半径,高考安徽理综17题更是要求求出曲线曲率. 在数学中曲线的曲率半径可以用高等数学的方法求出,这里我们另辟蹊径,从物理的角度采用初等数学求出曲线曲率半径. 我们首先来看高考安徽理综17题:一般的曲线运动可以分成很多小段,每小段都可以看成圆周运动的一部分,即把整条曲线用一系列不同半径的小圆弧来代替. 如图(a )所示,曲线上A 点的曲率圆定义为:通过A 点和曲线上紧邻A 点两侧的两点作一圆,在极限情况下,这个圆就叫做A 点的曲率圆,其半径ρ叫做A 点的曲率半径. 现将一物体沿与水平面成α角的方向以速度v 0抛出,如图(b )所示。
则在其轨迹最高点P 处得曲率半径是( )A .g v 20B .g v α220sinC .gv α220cosD .ααsin cos 220g v[解析] 物体在最高点P,只有水平速度为αcos 0v ,物体只受重力.由rv m F 2=向得: ρα20)cos (v m mg =则有:gv αρ220cos = 本题正确答案为C上述问题给我们启示: 从物理的角度,我们也可以求出曲线上某点的曲率半径. 事实上,物理学上我们常讨论的曲线有抛物线、椭圆、双曲线等,我们都可以利用上述的方法求曲率半径.下面我们来逐一研究. 一、求抛物线顶点的曲率半径物体做平抛运动时其轨迹就是抛物线.假设物体平抛初速度为0v ,运动轨迹如图2所示. 则有将物体的运动分解为水平分运动和竖直分运动: 公式为:t v x 0= ① 221gt y = ②联立①②式得222x v g y =图1x yO 图2v 0令202v g a =,则2ax y = 研究抛物线的顶点,从向心力出发,有: ρ2mv mg =则有a g v 2120==ρ,即抛物线2ax y =顶点的曲率半径为a21=ρ 二、求椭圆顶点的的曲率半径理论力学可以证明:飞行物在有心力场中运动,如果总机械能E <0则其轨迹必为椭圆,且引力源在其椭圆的一个焦点上.太阳系中,行星绕太阳运动的轨道是椭圆,太阳位于轨道的一个焦点上.多数人造卫星绕地球的轨道也是椭圆,地球位于卫星轨道的一个焦点上.如图3,质量为m 卫星绕质量为M 地球做椭圆运动,轨迹椭圆方程为:12222=+b y a x 地球位于椭圆左焦点上. 设椭圆顶点A 、A ′距离左焦点的距离为r ,易知:c a r A -= ,c a r A +=',设卫星在椭圆顶点A 、A ′处的速度v , 则对地球和卫星系统而言,机械能守恒同时角动量守恒.卫星在椭圆顶点A 、A ′处均满足以下两个方程:E rMm G mv =-221 ①mvr L = ②联立①②得关于r 的二次方程:0222=-+mEL r E Mm G r ③ 可以肯定方程③的两根就是A r 和'A r ,由韦达定理知:EGMma r r A A -==+2' 则: aGMmE 2-= ④ 卫星位于顶点A121ρv m = ⑤把c a r A -=带入方程①: E ca Mm G mv =--2121 ⑥联立方程④⑤⑥得: ab 21==ρ ⑦由对称性可知, 椭圆顶点A ′的曲率半径也是ab 21=ρ.卫星位于顶点B 时:万有引力可分为向心力θτcos 2aMmGF =和切向力θsin 2a MmGF n =. 由向心力公式得: 2222cos ρθv m aMmG = ⑧由几何关系易知: ab=θcos ⑨ 由方程①得: a GMm a Mm G mv 22122-=- ⑩ 联立⑧⑨⑩得: ba 22=ρ ○11 由对称性可知,椭圆顶点B ′的曲率半径也是ba 22=ρ.所以椭圆12222=+b y a x 长半轴上的两顶点曲率半径为a b 21==ρ,短半轴上两曲率半径为ba 22=ρ三、求双曲线顶点的曲率半径理论力学可以证明:飞行物在有心力场中运动,如果总机械能E >0则其轨迹必为双曲线的一支,且引力源在其双曲线的一个焦点上.实际上某些彗星的轨迹就是双曲线的一支(此时的有心力为万有引力),另外散射实验中,α粒子在库仑场中的运动轨迹也是双曲线的一支(此时的有心力为库仑斥力).假设某彗星m 进入太阳系中,彗星m 和太阳M 系统总能量E>0. 则彗星轨道为双曲线的一支,太阳在双曲线的一个焦点上,双曲线标准方程为12222=-b y ax ,如图4所示.彗星m 闯入太阳系,可认为是从无穷远出发,∞→r 时,引力势能为0,系统总机械能为E 就是天体的动能,则有2021mv E =研究彗星从无穷远到达双曲线顶点的过程,由机械能守恒定律得:ac GMm mv mv --=2202121 ○12 由角动量守恒定律得:)(0a c mv b mv -⋅=⋅ ○13 彗星到达双曲线顶点时有:22)(a c GMmmv -=ρ○14 联立方程○12○13○14得: ab 2=ρ ○15 由对称性可知双曲线12222=-b y ax 两个顶点的曲率半径均为a b 2=ρ.。
曲率及其计算公式
ρ=
1 1 , K= . ρ K
例3 设工件表面的截线为抛物线y=0.4x 2.现在要用砂轮 磨削其内表面.问用直径多大的砂轮才比较合适?
y
y=0.4 x2
4
2
O
2
x
例3 设工件表面的截线为抛物线y=0.4x 2.现在要用砂轮 磨削其内表面.问用直径多大的砂轮才比较合适? 解 砂轮的半径不应大于抛物线顶点处的曲率半径. y′=0.8x ,y′′=0.8, y′|x=0=0,y′′|x=0=0.8. 把它们代入曲率公式,得
C M′ ∆s ∆α α+∆α x
s
我们称 K =
曲率:
∆α 为弧段 MM ′ 的平均曲率. ∆s
我们称 K = lim
∆α 为曲Байду номын сангаасC在点M处的曲率. ∆s →0 ∆s ∆α dα dα lim = K= 在 存在的条件下 . ∆s → 0 ∆ s ds ds
)
∩
平均曲率:
曲率的计算公式:
K= dα . ds
∆y
∆s MM ′ =± ∆x | MM ′ |
( (
∆y | MM ′ | | MM ′ | = lim =y′, 因为 lim =1, 又 lim ∆x →0 ∆x ∆x →0 | MM ′ | M ′→ M | MM ′ | ds 2 因此 =± 1 + y′ . dx ds ds = 1 + y′2 . 由于s=s(x)是单调增加函数,从而 >0, dx dx 于是 ds = 1 + y′2 dx.这就是弧微分公式.
| ϕ ′(t )ψ ′′(t ) − ϕ ′′(t )ψ ′(t ) | K= . 2 2 32 [ϕ ′ (t ) + ψ ′ (t )]
曲率圆与曲率半径
故上半圆上任一点处的曲率
y '' R2 2 K 2 32 2 32 ( R x ) (1 y ' )
x2 1 32 (1 2 ) . 2 R x R
对下半圆有相同的结论。 可见圆上每点的弯曲程度相同。
三、曲率圆与曲率半径
处的曲率为 K K 0 . 在该点处曲线 的法线上, 于曲线凹的一侧取一点 如图3-14所示. 设曲线在点 M x, y
设曲线在点在该点处曲线的法线上于曲线凹的一侧取一点称为曲线在点曲线上相应点为由曲率圆的定义可知曲率圆与曲线在点m处有相同的切线和曲率且在点m邻近有相同的凹向
§7 平面曲线的弧微分与曲率
一、弧微分 二、曲率及其计算公式 三、曲率圆与曲率半径
在生产实践中,常常需要考虑曲线的弯曲程度.如厂 房结构中的钢梁、车床上的轴等,它们在外力作用下, 会发生弯曲,弯曲到一定程度就要断裂.因此计算梁或 轴的强度时,需要考虑它们弯曲的程度.曲线的弯曲程 度可以用曲率概念来描述. 本节我们将引入曲率的定义, 并利用导数建立曲率的计算公式. 为此, 下面先引入弧微 分概念.
arctan y '.
y '' 2 因此 d d x . 再注意到弧微分 ds 1 y ' dx, 2 1 y ' y '' d . K 所以由曲率定义得曲率计算公式: 3 ds (1 y '2 ) 2 例1 求曲线 xy 1 在点 (1,1) 处的曲率. 1 1 2 解 因 y , y ' 2 , y '' 3 . 所以 y '(1) 1, y ''(1) 2. x x x 曲线在点 (1,1) 处的曲率 y ''(1) 2 2 K . 3 3 2 2 2 2 (1 1) [1 y ' (1)]
曲线坐标计算万能公式
曲线坐标计算通用公式(复化Simpson 公式)推导一、已知条件1、线元起点坐标:(),A A A x y2、线元起点切线方位角:A α3、线元起点里程:A K4、线元终点里程:B K 5、线元起点曲率半径:A ρ 6、线元终点曲率半径:B ρ二、求解问题求线元上任意点的坐标:(),C x y 。
即推导曲线坐标计算通用公式。
三、图示:如右上图(图中未示y ∆值) 四、坐标计算公式线元上任意点C 的坐标计算公式为:A x x x =+∆————① A y y y =+∆————②由上式可知,关键问题是求出x ∆、y ∆。
五、x ∆计算若AC 是直线,直接采用公式cos x l α∆=可求出x ∆(其中l 为A 、C 两点间直线距离,α为AC 直线方位角),但是,A 、C 两点间是任意曲线相连,不能直接用上述公式计算x ∆,需利用微积分原理计算。
1、曲线AB 上任意一点的曲率ρ计算采用内插法得:()B AA AB Ak k k k ρρρρ-=+--————③其中:k ——曲线AB 上任意一点的里程。
2、曲线AB 上任意一点的切线方位角α计算如右图:C 是曲线AB 上任意一点,AT 、TC 是A 、C 两点的切线,利用圆曲线求弧长公式得:()90A A k k A R π-=()90A k k Rδβπ-==其中:k ——曲线上任意点里程。
R ——曲线上任意点的曲率半径。
(通过公式③求得,1R ρ=)()()1190A A A R R k k ααπ=++-()()90A A A k k αρρπ=++-————④ 使用公式③、④时的符号规定:线元右偏:A ρ、B ρ均为“+”(即线元起终点曲率半径输正值)。
线元左偏:A ρ、B ρ均为“—”(即线元起终点曲率半径输负值)。
3、x ∆计算根据公式③、④可推知,()cos y k α=⎡⎤⎣⎦是里程间隔[],A C k k 上k 的一个连续函数,计算A 、C 两点的坐标增量x ∆,也就是求在里程段[],A C k k 内,x 坐标的改变量。
曲率及其计算公式
有如下关系:
1 1 r , K . r K
例3 设工件表面的截线为抛物线y0.4x 2.现在要用砂轮 磨削其内表面.问用直径多大的砂轮才比较合适?
y
y=0.4 x2
4
2
O
2
x
例3 设工件表面的截线为抛物线y0.4x 2.现在要用砂轮 磨削其内表面.问用直径多大的砂轮才比较合适?
解 砂轮的半径不应大于抛物线顶点处的曲率半径. y0.8x ,y0.8, y|x00,y|x00.8. 把它们代入曲率公式,得
设曲线的直角坐标方程是yf(x),且f(x)具有二阶导数. 因为tan a y ,所以
da y y da sec a y, , 2 2 dx dx 1 tan a 1 y y 于是 da dx.又知 ds 1 y 2 dx. 1 y2
2
Ds MM Dx | MM |
(
(
y M Ds
2
Dy 2 1 Dx
(
M0
O x0
M
Dy
Dx
x x+Dx x
Ds MM | Dx | MM
2
Dy 2 1 Dx
2
从而,有
| y | K . 2 32 (1 y )
| y | K 例1 计算等双曲线x y 1在点(1,1)处的曲率. (1 y 2 ) 3 2
解
1 由y ,得 x
x 因此,y|x11,y|x12.
y
1
2
,y
2 x
3
.
曲线x y 1在点(1,1)处的曲率为
M0
高等数学典型例题与解法(一)01-第38讲 曲率与曲率半径_38
d 些= 亜
fcsc2t —2sint
孜=无=克赢=一乎毗
d%2 dx
dt
dt
____________
从而,曲率K= 伊〃 I g— 10 g_
3, 10
5 4sin3t"
(1 _|_ y,2)a (4sin2t + 25cos2*)2 (4 + 21cos^)2
当cost = 0即% = 0时曲率最大,当cost = ±1即工=±2时曲率最小.
K="
3,
(1+門2
NATIONAL UNIVERSITY OF DEFENSE TECHNOLOGY'
r
国防科学技术大学
第38讲曲率与曲率半径
(3)曲率半径与曲率中心
____
过曲线上。上点M作一个与其相切的圆(即它在
点M处与曲线有公共 切线),使该圆与曲线。 线在在点点MM处处有的相曲同率的圆凹,向其和圆曲心率和,半称径这分个别圆称为曲 为曲线C在点M处的曲率中心和曲率半径.
N«3I Mvtniey of Maw
高等数学典型例题与解法(一)
第38讲曲率与曲率半径
理学院李建平教授
主要内容
第38讲曲率与曲率半径
i弧微分平面光滑曲线的弧长微分(弧微分)在几何上是用切线长 作为曲线长的一种局部线性近似.
⑴平面光滑曲线C\y = y(x)的弧微分
ds = 1 + y,2dx.
国防科学技术大学
第38讲曲率与曲率半径
2、曲率曲率是曲线的切线的转角关于弧长的变化率.
(1)曲率定义 设M是光滑曲线Gy = y(x)上一定点,N是。上
异于M的任意一点.设弧段标力的长度为4s , 设 点M处的切线转动到点N处的切线位置时, 切线 转过的角度为,如果极限
曲率及其计算公式
例3 设工件表面的截线为抛物线y=0.4x2. 现在要用 砂轮磨削其内表面. 问用直径多大的砂轮才比较合适? 解 砂轮的半径不应大于抛物线顶点处的曲率半径. y′=0.8x, y′′=0.8, y′|x=0=0, y′′|x=0=0.8. 把它们代入曲率公式, 得
| y′′| =0.8. K= 2)3 2 (1+ y′ 抛物线顶点处的曲率半径为 ρ=K−1=1.25. 因此, 选用砂轮的半径不得超过1.25单位长, 即直径 不得超过2.50单位长.
§3.7 曲率
ቤተ መጻሕፍቲ ባይዱ
一、弧微分 二、曲率及其计算公式 三、曲率圆与曲率半径 曲线的弯曲线程度 与哪些因素有关. 怎样 度量曲线的弯曲程度?
一、弧微分
•曲线的基点与正向 设函数f(x)在区间(a, b)内具有连续导数. 在曲线y=f(x) 上取固定点M0(x0, y0)作为度量弧长的基点, 并规定依 x 增 大的方向作为曲线的正向.
曲率 设曲线C是光滑的, 曲线上 点M对应于弧s, 在点M处切线的 倾角为 α, 曲线上另外一点N对 应于弧s+∆s, 在点N处切线的倾 角为α+∆α . 平均曲率: ∆α , 称 为弧段 MN 的平均曲率. 记K = K ∆s 曲率: ∆α 记 K = lim , 称 K 为曲线 C 在点 M 处的曲率. ∆s→0 ∆s
| 2a | K= . 2]3 2 [1+ (2ax +b) 显然, 当2ax+b=0时曲率最大. 曲率最大时, x=− b , 对应的点为抛物线的顶点. 2a 因此, 抛物线在顶点处的曲率最大, 此处K=|2a|.
讨论: 1. 直线y=ax+b上任一点的曲率是什么? 2. 若曲线的参数方程为x=ϕ(t), y=ψ(t), 那么曲率如何 计算? 3. 半径为R的圆上任一点的曲率是什么? 提示: 1. 设直线方程为y=ax+b, 则y′=a, y′′= 0. 于是K=0. 2. K = |ϕ′(t)ψ ′′(t) −ϕ′′(t)ψ ′(t) | . [ϕ′2(t) +ψ ′2(t)]3/ 2 3. 圆的参数方程为x=R cos t, y=R sin t .