捷联式惯导系统与平台式惯导
捷联惯导系统

作业思考题
1、简要说明捷联惯导系统的基本组成和原理。 2、什么是数学平台?它有什么作用?
惯性导航系统
第四十四讲 捷联惯导系统 力学编排方程(一)
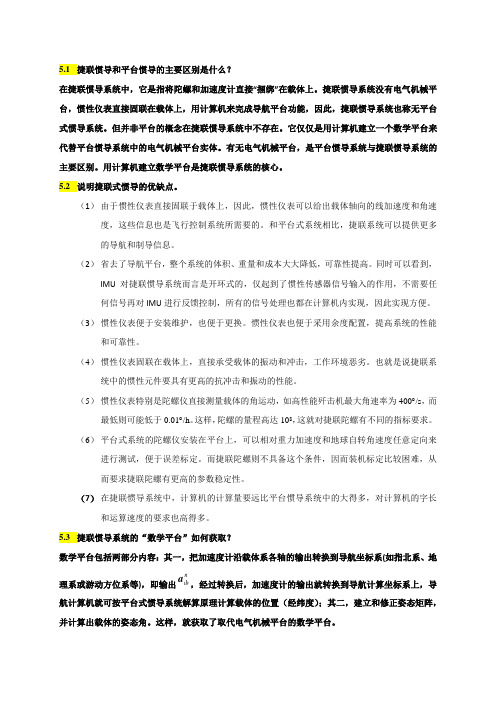
捷联式惯导系统(SINS)
加速度计
fb
数学平台
姿态矩阵 Cbp
f p 导航 速度、位置
计算机 姿态、航向
姿态矩阵计算
陀螺
ibb
pbb
b ip
姿态航向
-
C11 C21 C31
Cep 1 Cep T
C12 C13 1 C11 C21
C22
C23
C12
C22
C32 C33 C13 C23
C11 C22C33 C23C32 C21 C13C32 C12C33 C31 C12C23 C22C13
C31
C32
C33
位置矩阵微分方程组
Cep 0 f 0,0,0
1
p p epx epy
g g egx egy
R VeggxVeggy
VeppxVeppy
三、位置速率方程
11
p p epx epy
g g egx egy
RN RE
捷联惯导的发展
1、1950年起,德雷珀实验室捷联系统得到成熟的探索; 2、1969年,在“阿波罗-13”宇宙飞船,备份捷联惯导系统; 3、20世纪80~90年代,波音757/767、A310民机以及F-20战 斗机上使用激光陀螺惯导系统,精度达到1.85km/h的量级; 4、20世纪90年代,美国军用捷联式惯导系统已占有90% 。光 纤陀螺的捷联航姿系统已用于战斗机的机载武器系统中及波 音777飞机上。 5、国内由90年代挠性捷联惯导到现在激光捷联惯导、光纤陀 螺捷联航姿系统。
捷联惯导

坐标系的定义
1. 地理坐标系(下标为t)—— OXtYtZt :O 取载体质心,Xt 轴指向东,Yt 轴指向北,Zt 轴沿垂线指向天。 2. 导航坐标系(下标为n)—— OX nYnZn :O 取载体质心,Zn与 Zt 重合,Xn 与 Xt,Yn 与 Yt 相差一个游动方
C13
C23
C33
位置速率
p ep
位置速率是由飞行器地速的水平分量引起的,由于平台坐标系与地理坐标系相差 一个游动方位角,
可得:
VVENtt
cos sin
sin cos
VEp VNp
p ep
可写成
p epE
C32 C31
180 ,180
1.求纬度的真值L
L L 反正弦函数的主值域与L的定义域一致,因此:
主
2.求经度的真值
反正切函数的主值域是 90 ,90 与 的定义域不一致,因此需要在 的定义域内确定经度的真值。
由: 主
tan 1
C32 C31
tan 1
cos L sin cos L cos
其中:
.
V ep 平台系相对地球的加速度向量
f 加速度计测量的比力向量
2ie ep V ep 无明显物理意义,又称有害加速度
g 重力加速度向量
整理上式可得:
.
VEp
.
VNp
.
VUp
f
p E
浅谈惯导发展及其分类

浅谈惯导发展及其分类主要介绍了惯性导航的四个发展阶段的特点,以及惯性导航系统的分类即平台惯导和捷联惯导。
简要说明了两种惯导类型的结构,将两种分类进行了对比,阐述了其工作原理,指出了不同惯导类型的优缺点。
标签:惯性导航;发展历程;分类;优缺点1 引言惯性导航简称“惯导”,是一门较为综合的前沿学科。
其涉及了机电、光学、数学、力学、控制及计算机等领域[1]。
惯导系统是以牛顿定律为理论支撑,用加速度计测量出载体相对于选定的坐标的加速度,在进行二次积分,得到相应的位移;用陀螺仪感知转动角速度,经过一次积分得到转动角度,将上述过程经过多次迭代推算出实时位置。
因为与载体外界没有信号交流,惯性导航系统拥有完全自主性。
惯导系统适应性比较强,对工作环境没有要求,在没有任何外界信息摄入的情况下,系统可以实现全球范围内的导航与定位[2]。
正是由于这一系列特点,使其在航天、航空、航海等领域中有着非常广泛的应用。
2 惯导技术发展历程按照硬件技术的发展可将惯性导航技术划分四个发展阶段,但各阶段之间并无明显界限[3]。
上世纪三十年代以前是惯性技术发展的第一个阶段。
在这一阶段,具体实物上的研究进展主要有1852年法国人傅科根据地球自转原理制造出了第一台真正意义上的陀螺仪,以及1908年的摆式陀罗经问世。
理论研究方面,1687年牛顿提出了牛顿三大定律,对惯性技术的发展具有划时代的意义;1923舒勒摆理论被提出。
上世纪40年代火箭的研究推动了惯性导航技术的发展,使其进入第二个发展阶段,这一阶段的发展的主要特点是不仅仅局限在硬件技术的研究上,而是更加注重惯性导航系统的具体应用[3],其中最具代表性的是机械浮子式陀螺和摆式加速度计[4]。
二战期间,德国的V-2火箭第一次应用了惯导技术;随后在50年代中期,B29飛机上又应用了麻省理工学院研制的单自由度液浮陀螺;60年代后期,研制出了漂移仅为0.005°/h的G6B4型动压陀螺。
惯性导航系统的发展及应用

惯性导航系统的发展及应用绪论惯性导航是一门重要的学科技术,它是飞机、船舶、火箭等载体能顺利完成导航和控制任务的关键性技术之一。
1942年德国在V-2火箭上首次应用了惯性导航原理;1954年纯惯性导航系统在飞机上试飞成功。
30余年来,惯性导航技术获得迅速发展。
在我国惯性导航技术已在航空、航天、航海和陆地车辆的导航和定位中得到应用。
1970年以来,我过多次发射的人造地球卫星和火箭都采用了本国研制的惯性导航系统。
不仅如此,70多年以来,这门科学技术还在大地测量、海洋勘测、石油钻井、航空测量和摄影等国民经济领域里获得成功应用。
惯性导航简介惯性导航(Inertial Navigation)是20 世纪中期发展起来的完自主式的导航技术。
通过惯性测量组件(IMU)测量载体相对惯性空间的角速率和加速度信息,利用牛顿运动定律自动推算载体的瞬时速度和位置信息,具有不依赖外界信息、不向外界辐射能量、不受干扰、隐蔽性好的特点,且惯导系统能连续地提供载体的全部导航、制导参数(位置、线速度、角速度、姿态角)。
惯性导航技术,包括平台式惯导系统和捷联惯导系统。
平台式惯性导航系统将陀螺通过平台稳定回路控制平台跟踪导航坐标系在惯性空间的角速度。
捷联惯性导航系统利用相对导航坐标系角速度计算姿态矩阵,把雷体坐标系轴向加速度信息转换到导航坐标系轴向并进行导航计算。
惯性导航系统通常由惯性测量装置、计算机、控制显示器等组成。
惯性测量装置包括加速度计和陀螺仪,又称惯性导航组合。
3个自由度陀螺仪用来测量飞行器的三个转动运动;3个加速度计用来测量飞行器的3个平移运动的加速度。
计算机根据测得的加速度信号计算出飞行器的速度和位置数据。
控制显示器显示各种导航参数。
陀螺仪陀螺仪是惯性系统的主要元件。
陀螺仪通常是指安装在万向支架中高速旋转的转子,转子同时可绕垂直于自转轴的一根轴或两根轴进动,前者称单自由度陀螺仪,后者称二自由度陀螺仪。
陀螺仪具有定轴性和进动性,利用这些特性制成了敏感角速度的速率陀螺和敏感角偏差的位置陀螺。
捷联式惯导系统与平台式惯导

捷联式惯导系统与平台式惯导
惯导可分为两大类
目前,惯导可分为两大类:平台式惯导和捷联式惯导。
它们的主要区别在于,前者有实体的物理平台,陀螺和加速度计置于由陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;在捷联式惯导中,陀螺和加速度计直接固连在载体上。
惯性平台的功能由计算机完成,故有时也称作"数学平台",它的姿态数据是通过计算得到的。
惯导有固定的漂移率,这样会造成物体运动的误差,因此长射程的武器通常会采用指令、GPS等对惯导进行定时修正,以获取持续准确的位置参数。
激光陀螺具有精度高、测量范围宽、内部没有活动部件、受力学环境影响小、寿命长等特点,它是捷联系统的理想测量器件,因而得到了广泛的应用,美国、法国、日本等国都将激光陀螺捷联系统应用于火箭上。
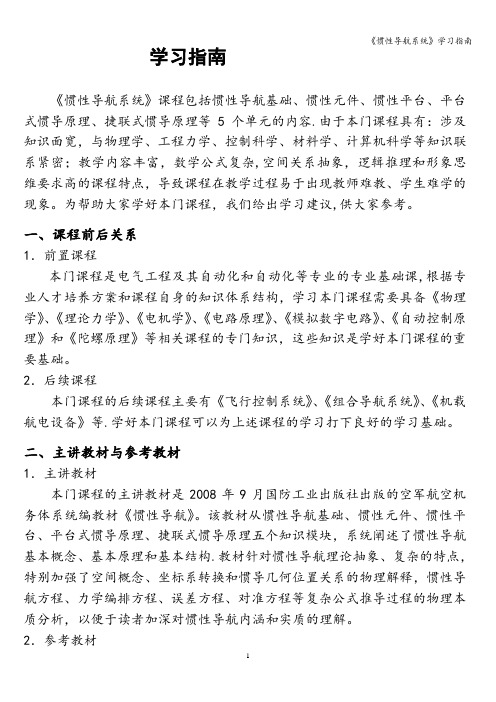
图1 激光陀螺速率捷联系统示意图
由3个激光陀螺和3个石英加速度计固连于运载火箭3个箭体轴上而成的捷联系统,如图1所示,3个激光陀螺测量沿箭体轴x1,y1,z1方向的角速度ωx1,ωy1,ωz1。
3个加速度计测量沿箭体轴x1,y1,z1方向的视加速度W x1, W y1,W z1。
、
图2 坐标变换关系图。
捷联惯性技术的发展及与平台惯导系统的对比
捷联惯性技术的发展及与平台惯导系统的对比捷联惯性技术是指利用惯性敏感器(通常使用加速度计和陀螺仪)来测量载体相对于惯性参考系的角速度和加速度,从而计算得到载体的姿态、速度和位置等参数的技术。
捷联惯性技术具有体积小、重量轻、可靠性高、成本低等优点,因此在军事、航空、航海等领域得到了广泛应用。
捷联惯性技术的发展可以追溯到20世纪60年代,当时美国国防部高级研究计划局(DARPA)开始资助一些研究项目,以探索将惯性敏感器直接固定在载体上的可能性。
随着微电子技术和制造工艺的不断发展,捷联惯性技术的性能得到了大幅提升,同时成本也得到了降低。
在捷联惯性技术的发展过程中,出现了多种不同的技术路线。
其中,卡尔曼滤波器是一种被广泛应用于捷联惯性系统的数据处理方法。
卡尔曼滤波器是一种最优估计方法,它能够利用观测数据和预测模型来估计系统的状态,同时考虑到观测噪声和模型误差。
在捷联惯性系统中,卡尔曼滤波器可以用于融合加速度计和陀螺仪的测量数据,以提高系统的性能和精度。
平台惯导系统是一种基于平台稳定性的惯性导航系统。
它通过将惯性敏感器安装在稳定的平台上,可以大大提高系统的精度和可靠性。
平台惯导系统通常由平台、惯性敏感器、控制系统和数据处理系统等组成。
其中,平台是整个系统的支撑结构,惯性敏感器用于测量载体的角速度和加速度,控制系统用于控制平台的运动轨迹,数据处理系统则用于对测量数据进行处理,得到载体的姿态、速度和位置等参数。
与捷联惯性技术相比,平台惯导系统具有更高的精度和可靠性。
这是因为在平台惯导系统中,惯性敏感器可以安装在稳定的平台上,从而消除了载体运动对测量数据的影响。
此外,平台惯导系统还可以通过控制系统来实现主动减震,以进一步提高系统的性能和精度。
然而,平台惯导系统也存在一些缺点。
首先,它的体积和重量较大,不利于小型化和轻量化。
其次,它的成本较高,不利于大规模应用。
最后,它的维护和校准难度较大,需要专业人员和技术支持。
惯性技术习题答案(5)
5.1捷联惯导和平台惯导的主要区别是什么?在捷联惯导系统中,它是指将陀螺和加速度计直接“捆绑”在载体上。
捷联惯导系统没有电气机械平台,惯性仪表直接固联在载体上,用计算机来完成导航平台功能,因此,捷联惯导系统也称无平台式惯导系统。
但并非平台的概念在捷联惯导系统中不存在。
它仅仅是用计算机建立一个数学平台来代替平台惯导系统中的电气机械平台实体。
有无电气机械平台,是平台惯导系统与捷联惯导系统的主要区别。
用计算机建立数学平台是捷联惯导系统的核心。
5.2说明捷联式惯导的优缺点。
(1)由于惯性仪表直接固联于载体上,因此,惯性仪表可以给出载体轴向的线加速度和角速度,这些信息也是飞行控制系统所需要的。
和平台式系统相比,捷联系统可以提供更多的导航和制导信息。
(2)省去了导航平台,整个系统的体积、重量和成本大大降低,可靠性提高。
同时可以看到,IMU对捷联惯导系统而言是开环式的,仅起到了惯性传感器信号输入的作用,不需要任何信号再对IMU进行反馈控制,所有的信号处理也都在计算机内实现,因此实现方便。
(3)惯性仪表便于安装维护,也便于更换。
惯性仪表也便于采用余度配置,提高系统的性能和可靠性。
(4)惯性仪表固联在载体上,直接承受载体的振动和冲击,工作环境恶劣。
也就是说捷联系统中的惯性元件要具有更高的抗冲击和振动的性能。
(5)惯性仪表特别是陀螺仪直接测量载体的角运动,如高性能歼击机最大角速率为400︒/s,而最低则可能低于0.01︒/h。
这样,陀螺的量程高达108,这就对捷联陀螺有不同的指标要求。
(6)平台式系统的陀螺仪安装在平台上,可以相对重力加速度和地球自转角速度任意定向来进行测试,便于误差标定。
而捷联陀螺则不具备这个条件,因而装机标定比较困难,从而要求捷联陀螺有更高的参数稳定性。
(7)在捷联惯导系统中,计算机的计算量要远比平台惯导系统中的大得多,对计算机的字长和运算速度的要求也高得多。
5.3捷联惯导系统的“数学平台”如何获取?数学平台包括两部分内容:其一,把加速度计沿载体系各轴的输出转换到导航坐标系(如指北系、地理系或游动方位系等),即输出niba,经过转换后,加速度计的输出就转换到导航计算坐标系上,导航计算机就可按平台式惯导系统解算原理计算载体的位置(经纬度);其二,建立和修正姿态矩阵,并计算出载体的姿态角。
《惯性导航系统》学习指南
学习指南《惯性导航系统》课程包括惯性导航基础、惯性元件、惯性平台、平台式惯导原理、捷联式惯导原理等5个单元的内容.由于本门课程具有:涉及知识面宽,与物理学、工程力学、控制科学、材料学、计算机科学等知识联系紧密;教学内容丰富,数学公式复杂,空间关系抽象,逻辑推理和形象思维要求高的课程特点,导致课程在教学过程易于出现教师难教、学生难学的现象。
为帮助大家学好本门课程,我们给出学习建议,供大家参考。
一、课程前后关系1.前置课程本门课程是电气工程及其自动化和自动化等专业的专业基础课,根据专业人才培养方案和课程自身的知识体系结构,学习本门课程需要具备《物理学》、《理论力学》、《电机学》、《电路原理》、《模拟数字电路》、《自动控制原理》和《陀螺原理》等相关课程的专门知识,这些知识是学好本门课程的重要基础。
2.后续课程本门课程的后续课程主要有《飞行控制系统》、《组合导航系统》、《机载航电设备》等.学好本门课程可以为上述课程的学习打下良好的学习基础。
二、主讲教材与参考教材1.主讲教材本门课程的主讲教材是2008年9月国防工业出版社出版的空军航空机务体系统编教材《惯性导航》。
该教材从惯性导航基础、惯性元件、惯性平台、平台式惯导原理、捷联式惯导原理五个知识模块,系统阐述了惯性导航基本概念、基本原理和基本结构.教材针对惯性导航理论抽象、复杂的特点,特别加强了空间概念、坐标系转换和惯导几何位置关系的物理解释,惯性导航方程、力学编排方程、误差方程、对准方程等复杂公式推导过程的物理本质分析,以便于读者加深对惯性导航内涵和实质的理解。
2.参考教材本门课程为广大读者提供了大量辅助参考资料,参考资料包括参考教材、学位论文、学术论文三个类别。
这些参考资料有助于读者全面了解惯性导航及相关领域的知识结构, 惯性导航理论和技术的发展方向。
以下给出的是主要参考教材清单.(1)《惯性导航与组合导航》,张宗麟,北京,航空工业出版社,2000年8月(2)《惯性导航》,秦永元,北京,科学出版社,2006年5月(3)《捷联惯性导航技术》(英)David H.Titterton,北京,国防工业出版社,2007年12月(4)《惯性器件与惯性导航系统》,邓志红,北京,科学出版社2012年6 月(5)《光纤陀螺仪》,(法)Hrtve G。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
捷联式惯导系统与平台式惯导
惯导可分为两大类
目前,惯导可分为两大类:平台式惯导和捷联式惯导。
它们的主要区别在于,前者有实体的物理平台,陀螺和加速度计置于由陀螺稳定的平台上,该平台跟踪导航坐标系,以实现速度和位置解算,姿态数据直接取自于平台的环架;在捷联式惯导中,陀螺和加速度计直接固连在载体上。
惯性平台的功能由计算机完成,故有时也称作"数学平台",它的姿态数据是通过计算得到的。
惯导有固定的漂移率,这样会造成物体运动的误差,因此长射程的武器通常会采用指令、GPS 等对惯导进行定时修正,以获取持续准确的位置参数。
激光陀螺具有精度高、测量范围宽、内部没有活动部件、受力学环境影响小、寿命长等特点,它是捷联系统的理想测量器件,因而得到了广泛的应用,美国、法国、日本等国都将激光陀螺捷联系统应用于火箭上。
图1 激光陀螺速率捷联系统示意图
由3个激光陀螺和3个石英加速度计固连于运载火箭3个箭体轴上而成的捷联系统,如图1所示,3个激光陀螺测量沿箭体轴 x 1,y 1,z 1方向的角速度ωx1,ωy1 ,ωz1。
3个加速度
计测量沿箭体轴x 1,y 1,z 1方向的视加速度W x1, W y1,W z1。
、
图2 坐标变换关系图。