信号与系统第二章 01
信号与系统课后题解第二章
⑺
对⑺式求一阶导,有:
de(t ) d 2 i 2 (t ) di (t ) du (t ) =2 +2 2 + c 2 dt dt dt dt de(t ) d 2 i2 (t ) di (t ) =2 + 2 2 + 2i1 (t ) + 2i 2 (t ) 2 dt dt dt
⑻
将⑸式代入⑻式中,有:
λ 2 + 2λ + 1 = 0
可解得特征根为 微分方程齐次解为
λ1, 2 = −1
y h (t ) = C1e −t + C2 te− t
由初始状态为 y (0 ) = 1, y ' (0 ) = 0 ,则有:
C1 = 1 − C 1 + C 2 = 0
由联立方程可得 故系统的零输入响应为:
由联立方程可得 故系统的零输入响应为:
A1 = 2, A2 = −1
y zi (t ) = 2e − t − e −2 t
(2)由原微分方程可得其特征方程为
λ 2 + 2λ + 2 = 0
可解得特征根为 微分方程齐次解为
λ1, 2 = −1 ± i
y h (t ) = e −t (C1 cos t + C2 sin t )
(− 3C1 + 3C2 )δ (t ) + (C1 + C2 )δ ' (t ) − (− 2C1 + C 2 )δ (t ) = δ (t )
(
(
( + C e )δ (t ) + (C e
2 1
)
−2 t
+ C2 e t δ ' (t )
信号与系统 第二章ppt剖析
第
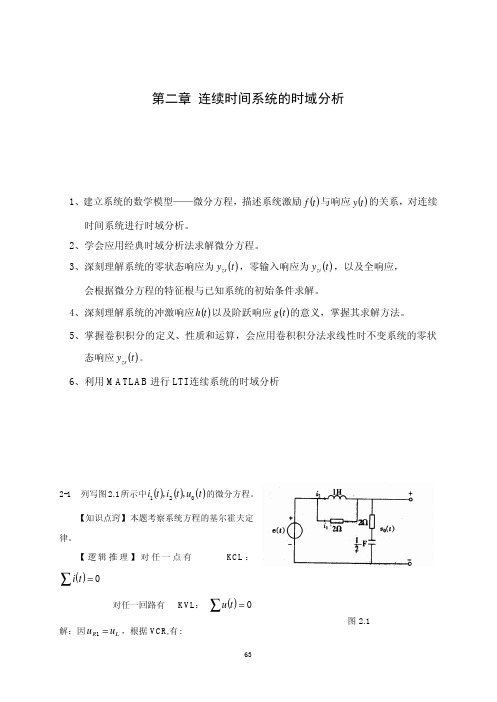
例1 求并联电路的端电压 vt 与激励 is t 间的关系。
7 页
电阻
iR t
1 R
vt
电感
iLt
1 L
t v d
ist
电容
iC
t
C
dv d
t
t
iR iL R LC
a ic
vt
b
根据KCL iRt iLt iC t iS t
系统的完全响应
第 17
页
求出齐次解rh t 和特解rp t 相加即得方程的完全解:
n
rt Aieit rp t i 1
利用初始条件求待定系数Ai 我们一般将激励信号加入的时刻定义为t=0,响应
的求解区间定为 t ,如0 果响应在0时刻没有跳变,通常
取t=0,这样对应的一组条件称为初始条件。
1
2
10
B1
, 3
B2
, 9
B3 27
所以,特解为
rp t
1 3
2 9
t
10 27
第 15
页
(2)
(原方程:
d2 rt
dt2
2
d rt
dt
3r t
d et
dt
et
)
当et et时, 很明显, 可选rt Bet。这里,B是待定系数。
代入方程后有:
Bet 2Bet 3Bet et et
于是,特解为 1 et。 3
B 1 3
几种典型激励函数相应的特解
第 16
页
激励函数e(t)
E(常数)
响应函数r(t)的特解
信号与系统课件第二章解读
8.1 Z变换的定义
fs (t) f (t) T (t) f (t) (t kT)
k
Fs (s)
f (t ) (t kT )estdt
k
f (kT )eskT
k
引入一个新的复变量z,令z esT或s 1 ln z T
则上式变为F (z) f (k )zk k
当 1时,级数收敛, 1时,级数发散, 1不定
8.1 Z变换的定义
3、有限长序列的收敛域
f (k) f (k) 0
k1 k k2 其它
k2
F (z) f (k )zk k k1
为有限项之和,最小收敛域为0 z
若k1 0, k2 0则存在负幂项,z 0 若k1 0, k2 0则只有正幂项,z 0,不含z , 0 z
Z[u(k)]
1 1 z1
z
z 1
即u(k) z z 1 z1
z 1
8.2 常用序列的Z变换
例3、求指数序列a k u(k )的z变换
解:Z[aku(k )] ak zk ( a )k
k0
k0 z
当 a 1即 z | a | 时,有 z
Z[aku(k)] 1 z 1 a za z
因为 a 1 ,所以 a z a1,则 f k 的双边Z变换存在
F z
z za
z z a1
z2
a a1 a a1
z z1
a z a1
若 a 1 ,则由于左边序列与右边序列的Z变换没有公共的收 敛域,此时该序列不存在双边Z变换。
8.3 Z变换的性质
1、线性性质
if
f1(k) F1(z) f2 (k) F2 (z)
| z || a |,
信号与系统第2章ppt课件
得到广泛的应用。调幅,调频都是
在该基础上进行的。
精选ppt
由此可见,将时间信号f(t)
乘以Cos(ω0t) 或Sin(ω0t)
,等效于将f(t)的频谱一分
为二,即幅度减小一半,沿
频率轴向左和向右各平移ω0.
第二章 傅立叶变换
例2 求如下矩形调幅信号的频谱函数
f(t) G (t)c o s 0 t
例7 如图a所示系统,已知乘法器的输入为
f (t) sin(2t) s(t)co3st)(
t
系统的频率响应为:
求输出y(t).
精选ppt
第二章 傅立叶变换
f (t) sin(2t) s(t)co3st)(
t
乘法器的输出信号为: x(t)f(t)s(t)
依频域卷积定理可知:X(j)21F(j)*S(j) 这里 f(t)F(j) s(t)S(j)
当 0 时 当 0 时
A () li m 0 A e () lim A e ( 0) lim 2 0 2 0
所以
A () li m 0A e()()
B()li m0Be()j
精选ppt
第二章 傅立叶变换
(6)符号函数 符号函数sgn(t)如图所示
由于sgn(t)不符合绝对可积条件, 故使用间接方法计算。
利用傅里叶反变换公式计算
第二章 傅立叶变换
例4 试求图示周期信号的频谱函数,图(b)中冲激函数的强度均为1.
(b)
[提示:(a)F()F[1]1F[cos(t)]
22
)
(b
Cn
1 T
T
2 T
fT(t)ejntdt
2
fT(t)(t)(tT2)
信号与系统王明泉版本~第二章习题解答
第2章 线性时不变连续系统的时域分析2.1 学习要求(1)会建立描述系统激励与响应关系的微分方程;(2)深刻理解系统的完全响应可分解为:零输入响应与零状态响应,自由响应与强迫响应,瞬态响应与稳态响应;(3)深刻理解系统的零输入线性与零状态线性,并根据关系求解相关的响应; (4)会根据系统微分方程和初始条件求解上述几种响应; (5)深刻理解单位冲激响应的意义,并会求解;(6)深刻理解系统起始状态与初始状态的区别,会根据系统微分方程和输入判断0时刻的跳变情况; (7)理解卷积运算在信号与系统中的物理意义和运算规律,会计算信号的卷积。
; 2.2 本章重点(1)系统(电子、机械)数学模型(微分方程)的建立; (2)用时域经典法求系统的响应; (3)系统的单位冲激响应及其求解;(4)卷积的定义、性质及运算,特别是()t δ函数形式与其它信号的卷积; (5)利用零输入线性与零状态线性,求解系统的响应。
2.3 本章的知识结构2.4 本章的内容摘要2.4.1系统微分方程的建立电阻:)(1)(t v Rt i R R =电感:dtt di L t v L L )()(= )(d )(1)(0t i v Lt i L tL L +=⎰∞-ττ 电容:dtt dv C t i C C )()(= ⎰+=tt L C C t i i Ct v 0)(d )(1)(0ττ 2.4.2 系统微分方程的求解 齐次解和特解。
齐次解为满足齐次方程t n t t h e c e c e c t y 32121)(λλλ+⋅⋅⋅++=当特征根有重根时,如1λ有k 重根,则响应于1λ的重根部分将有k 项,形如t k t k t k t k h e c te c e t c e t c t y 111112211)(λλλλ++⋅⋅⋅++=--- 当特征根有一对单复根,即bi a +=2,1λ,则微分方程的齐次解bt e c bt e c t y at at h sin cos )(21+= 当特征根有一对m 重复根,即共有m 重ib a ±=2,1λ的复根,则微分方程的齐次解bt e t c bt te c bt c t y at m m at h cos cos cos )(121-+⋅⋅⋅++= bt e t d bt te d bt e d at m m at at sin sin sin 121-+⋅⋅⋅+++ 特解的函数形式与激励函数的形式有关。
《信号与系统》奥本海姆第二章

conditions ( 初始条件 ) : d y (t 0 ) , , dt d
N 1
y (t 0 )
N 1
dt
完全解:
y(t)=yh(t)+yp(t)
齐次解 特解
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
当N=0时,即 ak 0, k 0 ,差分方程为:
M
a 0 y[ n ]
M
b
j0
j
x[ n j ]
y[ n ]
a
j 0
M
bj
0
x[ n j ]
h[ n]
j 0
bj a0
[n j ]
0nM
bn h[ n ] , a0
Generated by Foxit PDF Creator © Foxit Software For evaluation only.
w(n) bk x(n k ) b0 x(n) b1x(n 1) ... bM x(n M )
方框图为:
x n )) x(( n
D D
b0 1 / a 0
b1 a1
1/ a0y ( n ) y ( n) w(v n( )n ) w(n) b0
D D
D D
N k k 0
M k k 0
a y ( n k ) b x( n k )
N 1 M y(n) bk x(n k ) ak y(n k ) a0 k 0 k 1
令 w(n)
M
b x(n k )
《信号与系统分析基础》第二章部分习题参考答案

第二章部分习题参考答案2-6 试求下列各函数1()f t 与2()f t 之卷积。
121212(-)01(1) ()() ()() (0) ()()()(-) ()(-)11(1) 0(2) ()t tt t tt t f t u t f t e u t f t f t f f t d u eu t d e e d e e e t f t ααταατααταατττττττααδ-+∞-∞+∞---∞--==>*===⋅=⋅=-≥=⎰⎰⎰,解:,2121212() ()cos(45)()()()cos[()45] cos(45)(3) ()(1)[()(1)] ()(1)(2) ()()t f t t f t f t t d t f t t u t u t f t u t u t f t f t ωδτωττω+∞-∞=+*=-+=+=+--=---*⎰,解:,解:ττ222221211211()(-1)(-1)-2(-2)(-2)(-1)(-1)-(-2)(-2)2211-(-2)(-2)(-3)(-3)-(-2)(-2)(-3)(-3)22()*()()1,()0123, (1-)(1)21(1)--(12ttf t t u t t u t t u t t u t t u t t u t t u t t u t f t f t f t t f t t t dt t ft t t t τττ=+++=<=<<+=+-=++⎰222-112222212111)-222123, (1-)(1)-221()2(1)-2(1-)(-1)211121---152223, ()*()0.t t t t t t d t f t t t t t t t t t t t f t f t ττττ-+=<<+=+=+++=+++=++>=⎰121221--(4) cos , (1)-(-1)()*()()(-) [(1)-(-1)][cos(-)] cos[(1)]-cos[(-1)]f t t f t t t f t f t f f t d t t t d t t ωδδτττδδωττωω+∞∞+∞∞==+==+⋅=+⎰⎰ -212-212--2-220(5) ()(), ()sin ()()()*()()sin(-)(-) sin(-)sin t t ttt tf t e u t f t t u t f t f t f t e u t u t d e t d ee d τττττττττ+∞∞==⋅==⋅⋅⋅=⋅=⋅⎰⎰⎰-12-(-)--0022-(-)-33-2-3(6) ()2[()-(-3)], ()4()-(-2)0, ()0.02,()2488-825, 88()8(-)5, ()0.t tt t t tt t t t t f t e u t u t f t u t u t t f t t f t e d e e e t ft ed ef t e e e t f t ττττττ-==<=<<==⋅=<<===>=⎰⎰2-8 求阶跃响应为32()(21)()t t s t e e u t --=-+的LTI (线性时不变)系统对输入()()t x t e u t =的响应。
信号与系统 第二章

( x1 ( t ) + x2 ( t ))* h( t ) = x1 ( t )* h( t ) + x2 ( t )* h( t )
Application: Parallel system a common system Can break a complicated convolution into several simpler ones
Signals & Systems
Example 2.10
1 n x[n] = ( ) u[ n] + 2n u[− n] 2 h[n] = u[n]
Signals & Systems
2.3.3 The Associative Property
x[n]* ( h1 [n]* h2 [n]) = ( x[n]* h1 [n])* h2 [n] x ( t )*[h1 ( t )* h2 ( t )] = [ x ( t )* h1 ( t )]* h2 ( t )
1 h[n] = 0 n = 0,1 otherwise
Example 2.9
If the system is LTI,determine the relationship between input and output If the system is not LTI,determine the relationship between input and output
Signals & Systems
2.2 Continuous-Time LTI System: The Convolution Integral
2.2.1 The Representation ContinuousTime Signals In Term Of Impulse
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
求(1)当f(t)=t2,y(0)=1,y´(0)=1时的全解;
(2)当f(t)=e-t,y(0)=0,y´(0)=1时的全解。
解:(1)yzi,微分方程变为y´´(t)+5y´(t)+6y(t)=0, 特征根λ1=-2,λ2=-3,则yh1(t)=C1e-2t+C2e-3t即为零输入解 由初始条件( y(0)=1,y´(0)=1 )确定待定常数C1、C2。 y(0)=C1+C2=1,y´(0)=-2C1-3C2=1
y
n
t a n 1 y
bm f
n 1
t a1 y
m 1
1
t a0 y t
1
m
t b m 1 f
t ... b1 f
t b0 f t
n阶常系数微分方程
5
n阶常系数微分方程的求解法
信号与系统
第二章 连续时间系统的时域分析
主要内容
连 续 时 间 系 统
系统的数学模型
微分方程
系统微分方程的解的形式
求解方法
卷积积分法
1
2.1 线性连续系统的描述及其响应
系统分析任务: 运用数学工具去处理,建立数学模型 对所得的数学解给出物理解释,赋予物理意义。 一、LTI系统的微分方程描述 LTI数学模型
全解为:y(t)=yh(t)+yp(t)=C1e-2t+C2e-3t+t2-t+0.5
11
接着由初始条件确定待定常数C1、C2。 y(0)=C1+C2+0.5=1,y´(0)=-2C1-3C2-1=1 解得:C1=3.5,C2=-3。 最后得全解:y(t)=3.5e-2t-3e-3t+t2-t+0.5,t≥0 (2)齐次解同上。 当激励f(t)=e-t时,由表2.2知,其特解为:yp(t)=Pe-t 代入微分方程可得 :Pe-t-5Pe-t+6Pe-t=-2e-t+6e-t 所以P=2, 特解为:yp(t)=2e-t 全解为:y(t)=C1e-2t+C2e-3t+2e-t 由初始条件确定待定常数C1、C2。 y(0)=C1+C2+2=0,y´(0)=-2C1-3C2-2=1 由此得:C1=-3、 C2=1 最后得微分方程的全解为 y(t)=-3e-2t+e-3t+2e-t,t≥0
y
n
t a n 1 y
bm f
n 1
t a1 y
m 1
1
t a0 y t
1
m
t b m 1 f
n 1
t b1 f
1
t b0 f t
齐次解满足的齐次方程
y t yh t y p t
系统本身的特性
激励信号
自由响应(固有响应)
强迫响应
10
例2:若描述某LTI系统的微分方程为
y´´(t)+5y´(t)+6y(t)=2f´(t)+6f(t) 求(1)当f(t)=t2,y(0)=1,y´(0)=1时的全解;
(2)当f(t)=e-t,y(0)=0,y´(0)=1时的全解。
K C L: i t 0 K V L: u t 0
3
例1:如下图,写出电流ig(t)和电阻R1上电压u1(t)的微分婴儿湿疹方 程表示式。
解:根据KVL: u C t u 1 t i L t R 2 u L t ........... 1 KCL: VCR: iC t C
解:(1)特征方程为λ2+5λ+6=0,其特征根λ1=-2,λ2=-3。 微分方程的齐次解为:yh(t)=C1e-2t+C2e-3t
由表2.2可知,当f(t)=t2时,其特解可设为:yP(t)=P2t2+P1t+P0
将其代入微分方程得 2P2+5(2P2t+P1)+6(P2t2+P1t+P0)=4t+6t2 解得:P2=1,P1=-1,P0=0.5 于是,特解为yp(t)=t2-t+0.5
14
由表2.2可知,当f(t)=t2时,其特解可设为:yP(t)=P2t2+P1t+P0
将其代入微分方程得:2P2+5(2P2t+P1)+6(P2t2+P1t+P0)=4t+6t2 解得:P2=1,P1=-1,P0=0.5 于是,特解为yp(t)=t2-t+0.5 则:yzs(t)=yh2(t)+yp(t)=C3e-2t+C4e-3t+t2-t+0.5 由初始条件( y(0)=y´(0)=0 )确定待定常数C3、C4。
Pm t
m
r 1
e
t
P1te
m 1
α是r重特征根
Pm 1t
P1t P0
所有特征根均不等于0
有r重等于0的特征根
t
m
t
r
P
m
t
m
Pm 1t
m 1
P1t P0
9
3、全解[y(t)] 常系数线性微分方程的完全解是其齐次解与特解之和。即
求得C1=-4,C2=2,yzs(t)=-4e-2t+2e-3t+2e-t
yzi为:yzi(t)=C3e-2t+C4e-3t 由初始条件确定待定常数C3、C4。 y(0)=C1+C2=0,y´(0)=-2C1-3C2=1,求得C1=1,C2=-1, yzi(t)=e-2t-e-3t 最后得微分方程的全解为:y(t)=-3e-2t+e-3t+2e-t,t≥0
d u1 t
2
iC t i g t i L t ........... 2
duC t dt ,uL t L d iL t dt , u 2 t R 2 i L t , u 1 t R1 iC t
当激励f(t)=e-t时,由表2.2知,其特解为:yp(t)=Pe-t 代入微分方程可得 :Pe-t-5Pe-t+6Pe-t=-2e-t+6e-t 所以P=2, 特解为:yp(t)=2e-t
yzs为:yzs(t)=C1e-2t+C2e-3t+2e-t
由初始条件确定待定常数C1、C2。 y(0)=C1+C2+2=0,y´(0)=-2C1-3C2-2=0
详细分析见郑君里编写的《信号与系统》22
17
经典法不足之处
用经典法求解微分方程时,所用的初始值都是值t=0+ 时刻的值。 若微分方程右边激励项较复杂,则难以处理。 若激励信号发生变化,则须全部重新求解。 若初始条件发生变化,则须全部重新求解。 这种方法是一种纯数学方法,无法突出系统相应的 物理概念。
输入-输出特性
常系数线性微分方程
基尔霍夫定律(KCL与KVL)
电路系统
元件端口的电压-电流关系(VCR)
2
1、VCR
电阻: u t R i t 电感:
u t Ldi t dt du t dt
电容: i t C
2、基尔霍夫定律
对任一点,有 对任一回路,有
n
Cfe
i
i t
y p t
i 1
i 1
自由响应
强迫响应
i t
y zi t 零输入响应
i t
y zs t 零状态响应
式中nC来自iei 1
n
Cx e
i
i 1
n
Cfe
i
i t
i 1
自由响应
零输入响应
零状态响应 的齐次解
13
例3:重复例2,分为yzs和yzi求解,描述LTI系统的微分方程为 y´´(t)+5y´(t)+6y(t)=2f´(t)+6f(t)
at
8
2、特解[yp(t)] 特解的函数形式与激励函数的形式有关
表2.2 列出了几种激励及其所对婴儿湿疹应特 解的形式 激励f(t) 特解yp(t) 备注
B(常数)
P
Pe
t
t t
t t
P(待定常数)
α不是特征根 α是特征单根
P0 e
e
t
r
P1te
Pr t e
t
P0 e
Pr 1t
y
n
t a n 1 y
n
t a1 y
n 1
t a0 y t 0
系统的特征方程为
a n 1
a1 a 0 0
其中,λ是特征方程的根。
7
设齐次方程的特征根均为单实根λi(i为自然数),则微分方程 的齐次解为
yh t
n
C ie
i t
i 1
上式中,常数Ci由初始条件确定。
表2.1不同特征根所对应的齐次解
特征根λ
齐次解yh(t)
单实根
r重实根 一对共轭复根 λ1,2=α±jβ
给出一项:C i e
给出r项:C 1 e
t
t
C 2 te
t
C rt
r 1
e
t
给出两项: e C 1 co s t C 2 sin t
解得:C1=4,C2=-3。yzi(t)=4e-2t-3e-3t yzs,微分方程仍为y´´(t)+5y´(t)+6y(t)= 2f´(t)+6f(t),